- История радионавигации

Содержание
- 2. РАДИОНАВИГАЦИЯ – определение подвижным объектом своего местоположения и курса с помощью радиотехнических средств Радионавигация выросла из
- 3. ЭТАПЫ РАЗВИТИЯ РАДИОНАВИГАЦИИ С 1897 по 1920 гг. – первые идеи радиопеленгации и появление радиопеленгаторов и
- 4. 1887 г. – Г. Герц использовал рамку для обнаружения электромагнитных волн. 1905 – 1907 гг. –
- 5. Методы амплитудной радиопеленгации
- 6. Три возможности определения пеленга на корабле: 1. Береговой радиопеленгатор + корабельная радиостанция. 2. Береговой направленный радиомаяк
- 7. 1910 – 1914 г. – первые береговые радиопеленгаторы. 1914 г. – радиопеленгатор И.И.Ренгартена (Россия). Береговые радиопеленгаторы.
- 8. Меньшее распространение получили радиопеленгаторы с вращающейся рамкой Радиопеленгатор с вращающейся рамкой (1918 г.)
- 9. Направленные радиомаяки. Направленные радиомаяки излучали сигнал, приняв который, на корабле определяли свой пеленг М-образные антенны последовательно
- 10. Измерение пеленга по методу фирмы ТЕЛЕФУНКЕН 16 антенн поочередно подключаются к передатчику и излучают немодулированный сигнал,
- 11. Фирмой Телефункен такой радиомаяк был разработан перед первой мировой войной.
- 12. Этот принцип измерения пеленга стал использоваться в вращающихся радиомаяках Первый вращающийся радиомаяк был построен и испытан
- 13. Ненаправленные радиомаяки и корабельные радиопеленгаторы .
- 14. В России корабельный радиопеленгатор был принят на вооружение флота в конце 1915 года. В 1907 г.
- 15. Корабельный радиопеленгатор
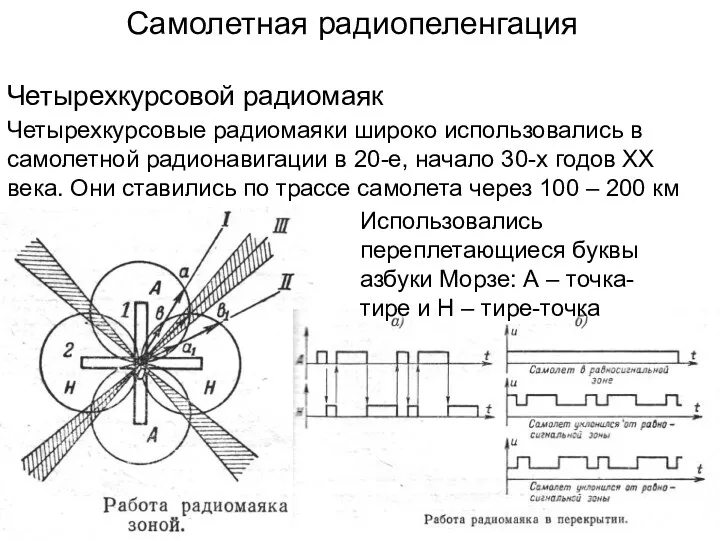
- 16. Четырехкурсовой радиомаяк Четырехкурсовые радиомаяки широко использовались в самолетной радионавигации в 20-е, начало 30-х годов ХХ века.
- 17. Во второй половине 30-х годов четырехкурсовые радиомаяки стали заменяться самолетными радиопеленгаторами (радиокомпасами), работающими с ненаправленными радиомаяками.
- 18. Радиокомпас
- 19. 1930 г. – Л.И.Мандельштам и Н.Д.Папалекси (СССР) получили патент на радиоинтеренционный (фазовый) метод измерения дальности. Совместно
- 20. МЕТОДЫ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ Угломерный 1920-е годы
- 21. Угломерно-дальномерный Используется в системах ближней навигации: РСБН (1958, СССР), VOR/DME (1948, США) Угол измеряется всенаправленным радиопеленгатором
- 22. РСБН-2
- 23. Совмещенные радиомаяк азимутальный РМА-90 и радиомаяк дальномерный РМД-90
- 24. Антенная система VOR/DME
- 25. Дальномерный Шоран (Short Range Navigation, 1943 г., США) –дальномерная импульсная система Дальность действия до 500 км
- 26. Разностно-дальномерный АС – СВ = Const Индикатор бортового приемника (С) Первая отметка от А, вторая –
- 27. Лоран-А (Long Range Navigation 1942 г., США) – разностно-дальномерная импульсная система Частота 1750 – 1950 кГц
- 28. СПУТНИКОВЫЕ РАДИОНАВИГАЦИОННЫЕ СИСТЕМЫ 1957г. – запуск искусственного спутника Земли (СССР) 1963 г. – начало работ по
- 29. Координаты наземного объекта П рассчитывались по зависимости доплеровской частоты от времени Недостатки: 1) низкая точность определения
- 30. СРЕДНЕВЫСОТНЫЕ СНС 1973 г. – начало работ по программе “NavStar-GPS” (США) 1982 г. – начало работ
- 32. ОПРЕДЕЛЕНИЕ МЕСТОПОЛОЖЕНИЯ 1. Определение псевдодадьности между навигационным космическим аппаратом (НКА) и пользователем (НАП) 2. Расчет координат
- 33. ОШИБКИ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ
- 35. Скачать презентацию
РАДИОНАВИГАЦИЯ – определение подвижным объектом своего местоположения и курса с помощью
РАДИОНАВИГАЦИЯ – определение подвижным объектом своего местоположения и курса с помощью
ЭТАПЫ РАЗВИТИЯ РАДИОНАВИГАЦИИ
С 1897 по 1920 гг. – первые идеи радиопеленгации
ЭТАПЫ РАЗВИТИЯ РАДИОНАВИГАЦИИ
С 1897 по 1920 гг. – первые идеи радиопеленгации

1887 г. – Г. Герц использовал рамку для обнаружения электромагнитных волн.
1905
1887 г. – Г. Герц использовал рамку для обнаружения электромагнитных волн.
1905
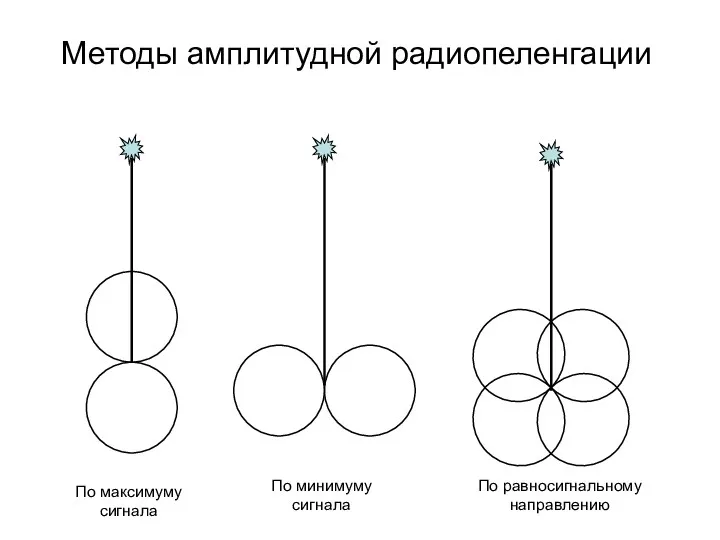
Методы амплитудной радиопеленгации
Методы амплитудной радиопеленгации
Три возможности определения пеленга на корабле:
1. Береговой радиопеленгатор + корабельная радиостанция.
2.
Три возможности определения пеленга на корабле:
1. Береговой радиопеленгатор + корабельная радиостанция.
2.
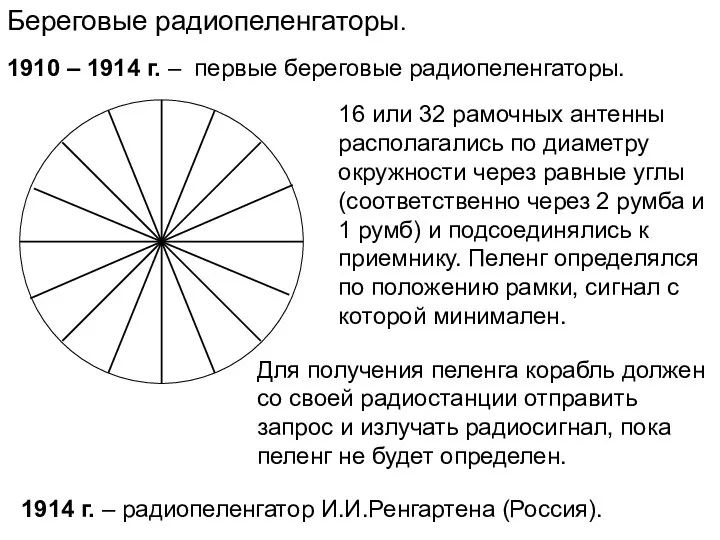
1910 – 1914 г. – первые береговые радиопеленгаторы.
1914 г. –
1910 – 1914 г. – первые береговые радиопеленгаторы.
1914 г. –

Меньшее распространение получили радиопеленгаторы с вращающейся рамкой
Радиопеленгатор с вращающейся рамкой (1918
Меньшее распространение получили радиопеленгаторы с вращающейся рамкой
Радиопеленгатор с вращающейся рамкой (1918
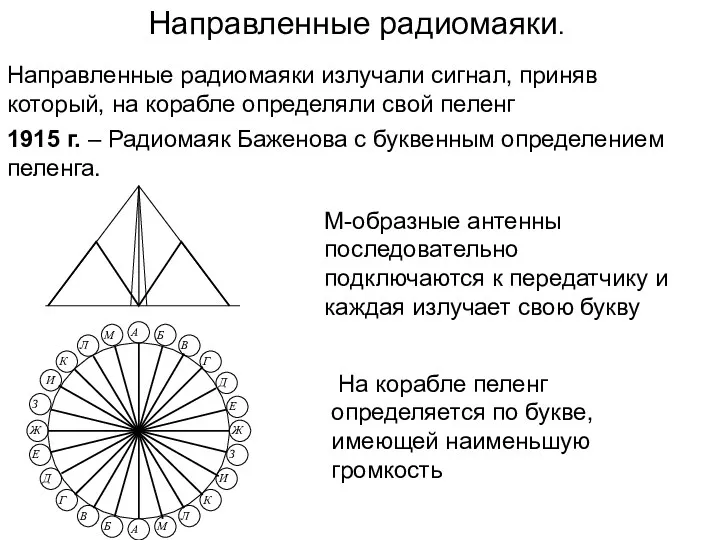
Направленные радиомаяки.
Направленные радиомаяки излучали сигнал, приняв который, на корабле определяли
Направленные радиомаяки.
Направленные радиомаяки излучали сигнал, приняв который, на корабле определяли
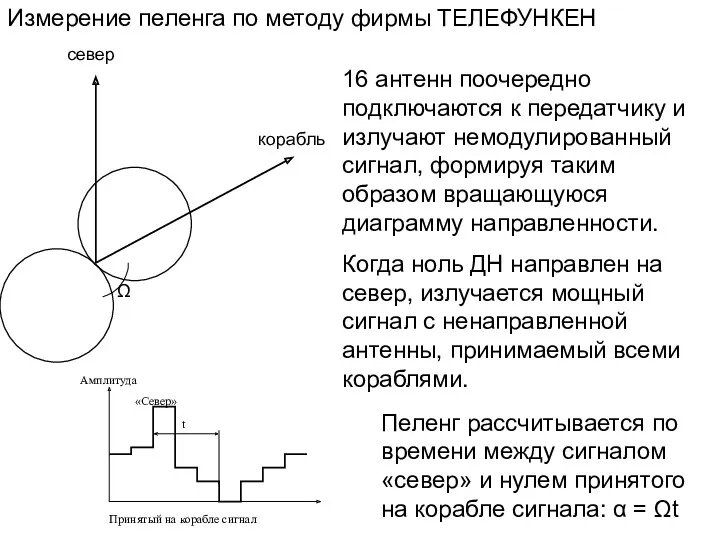
Измерение пеленга по методу фирмы ТЕЛЕФУНКЕН
16 антенн поочередно подключаются к передатчику
Измерение пеленга по методу фирмы ТЕЛЕФУНКЕН
16 антенн поочередно подключаются к передатчику

Фирмой Телефункен такой радиомаяк был разработан перед первой мировой войной.
Фирмой Телефункен такой радиомаяк был разработан перед первой мировой войной.
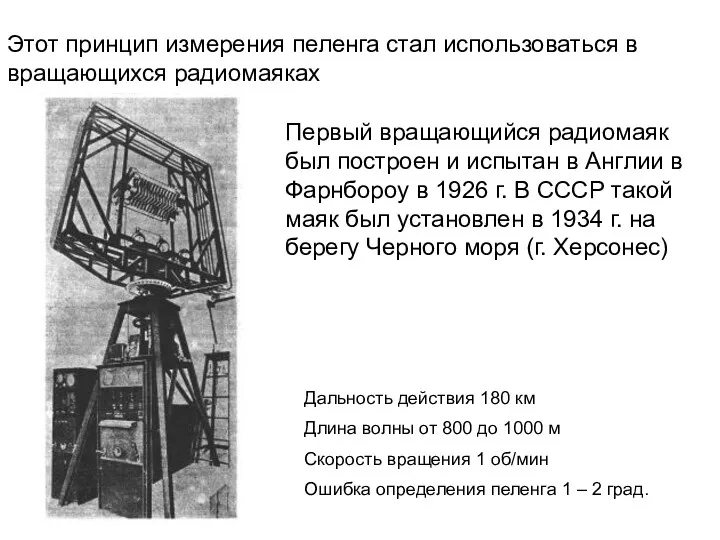
Этот принцип измерения пеленга стал использоваться в вращающихся радиомаяках
Первый вращающийся радиомаяк
Этот принцип измерения пеленга стал использоваться в вращающихся радиомаяках
Первый вращающийся радиомаяк

Ненаправленные радиомаяки и корабельные радиопеленгаторы .
Ненаправленные радиомаяки и корабельные радиопеленгаторы .
В России корабельный радиопеленгатор был принят на вооружение флота в конце
В России корабельный радиопеленгатор был принят на вооружение флота в конце
Корабельный радиопеленгатор
Корабельный радиопеленгатор
Четырехкурсовой радиомаяк
Четырехкурсовые радиомаяки широко использовались в самолетной радионавигации в 20-е, начало
Четырехкурсовой радиомаяк
Четырехкурсовые радиомаяки широко использовались в самолетной радионавигации в 20-е, начало
Во второй половине 30-х годов четырехкурсовые радиомаяки стали заменяться самолетными радиопеленгаторами
Во второй половине 30-х годов четырехкурсовые радиомаяки стали заменяться самолетными радиопеленгаторами
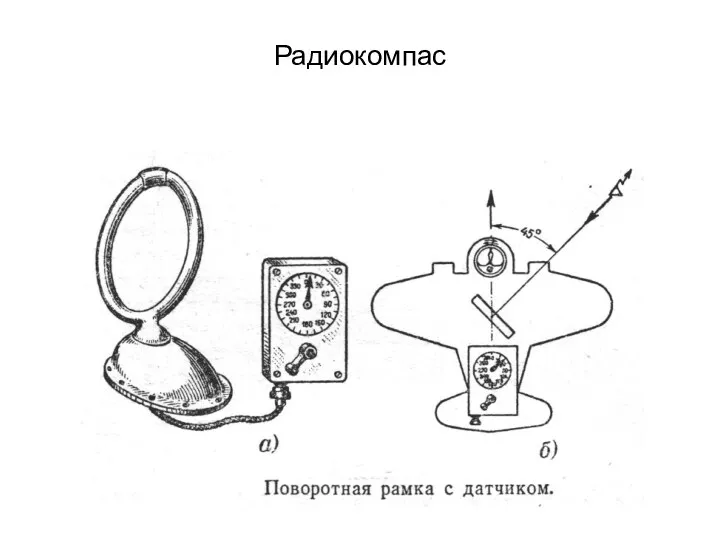
Радиокомпас
Радиокомпас
1930 г. – Л.И.Мандельштам и Н.Д.Папалекси (СССР) получили патент на радиоинтеренционный
1930 г. – Л.И.Мандельштам и Н.Д.Папалекси (СССР) получили патент на радиоинтеренционный
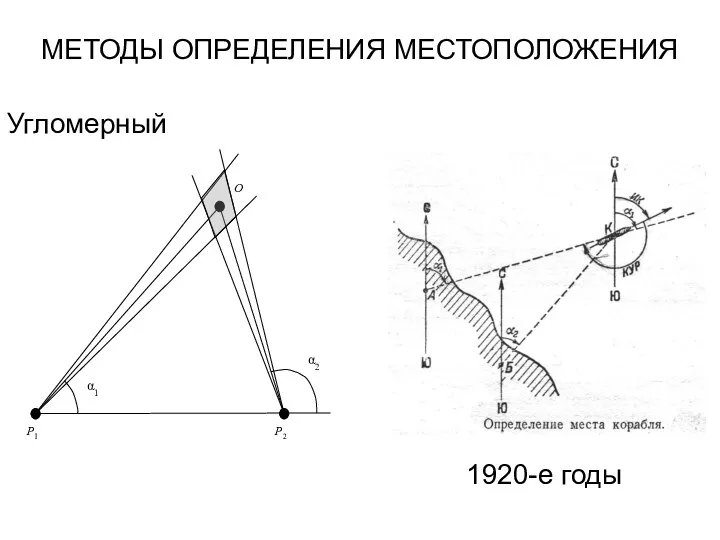
МЕТОДЫ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ
Угломерный
1920-е годы
МЕТОДЫ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ
Угломерный
1920-е годы
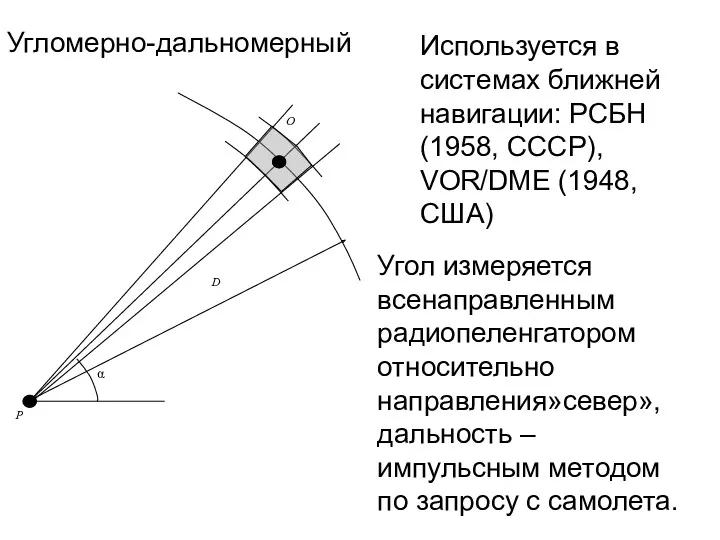
Угломерно-дальномерный
Используется в системах ближней навигации: РСБН (1958, СССР),
VOR/DME (1948, США)
Угломерно-дальномерный
Используется в системах ближней навигации: РСБН (1958, СССР),
VOR/DME (1948, США)

РСБН-2
РСБН-2

Совмещенные радиомаяк азимутальный РМА-90 и радиомаяк дальномерный РМД-90
Совмещенные радиомаяк азимутальный РМА-90 и радиомаяк дальномерный РМД-90

Антенная система VOR/DME
Антенная система VOR/DME
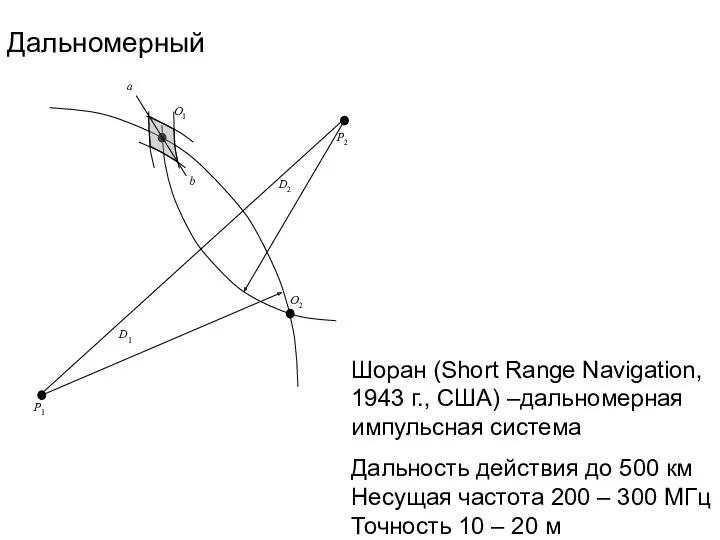
Дальномерный
Шоран (Short Range Navigation, 1943 г., США) –дальномерная импульсная система
Дальность
Дальномерный
Шоран (Short Range Navigation, 1943 г., США) –дальномерная импульсная система
Дальность
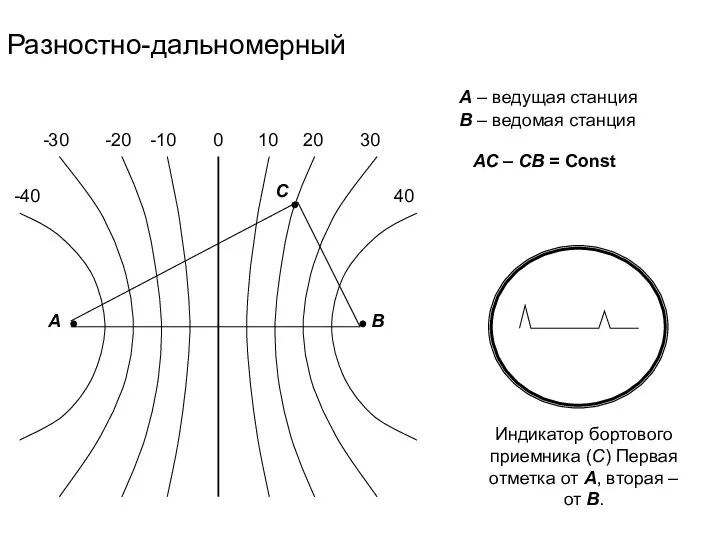
Разностно-дальномерный
АС – СВ = Const
Индикатор бортового приемника (С) Первая отметка от
Разностно-дальномерный
АС – СВ = Const
Индикатор бортового приемника (С) Первая отметка от
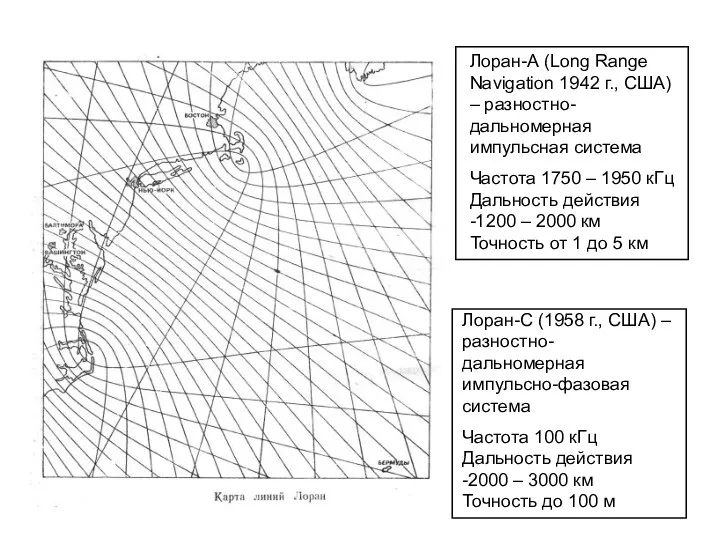
Лоран-А (Long Range Navigation 1942 г., США) – разностно-дальномерная импульсная система
Частота
Лоран-А (Long Range Navigation 1942 г., США) – разностно-дальномерная импульсная система
Частота
СПУТНИКОВЫЕ РАДИОНАВИГАЦИОННЫЕ СИСТЕМЫ
1957г. – запуск искусственного спутника Земли (СССР)
1963 г. –
СПУТНИКОВЫЕ РАДИОНАВИГАЦИОННЫЕ СИСТЕМЫ
1957г. – запуск искусственного спутника Земли (СССР)
1963 г. –
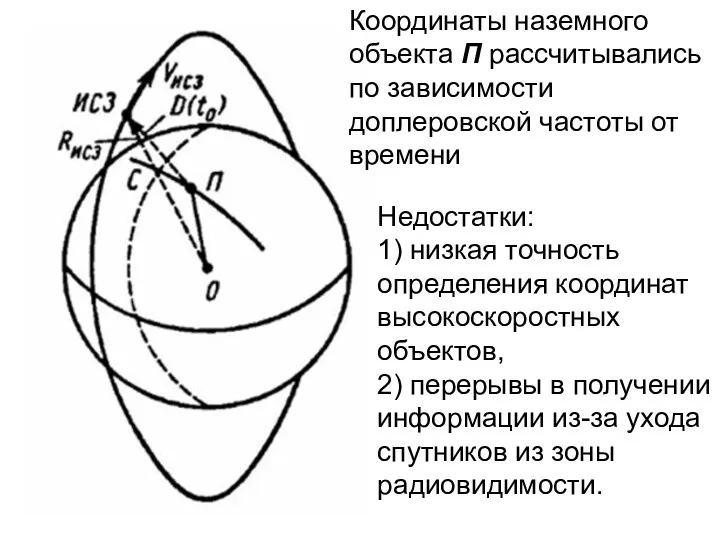
Координаты наземного объекта П рассчитывались по зависимости доплеровской частоты от времени
Недостатки:
1)
Координаты наземного объекта П рассчитывались по зависимости доплеровской частоты от времени
Недостатки:
1)
СРЕДНЕВЫСОТНЫЕ СНС
1973 г. – начало работ по программе “NavStar-GPS” (США)
1982
СРЕДНЕВЫСОТНЫЕ СНС
1973 г. – начало работ по программе “NavStar-GPS” (США)
1982
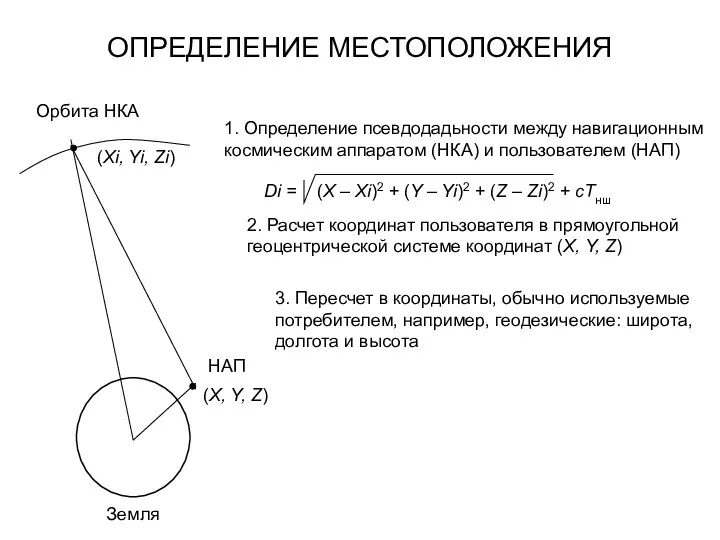
ОПРЕДЕЛЕНИЕ МЕСТОПОЛОЖЕНИЯ
1. Определение псевдодадьности между навигационным космическим аппаратом (НКА) и пользователем
ОПРЕДЕЛЕНИЕ МЕСТОПОЛОЖЕНИЯ
1. Определение псевдодадьности между навигационным космическим аппаратом (НКА) и пользователем
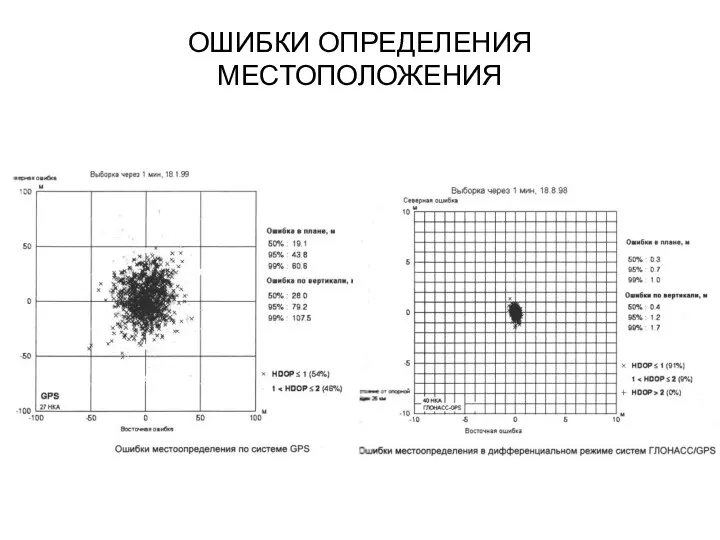
ОШИБКИ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ
ОШИБКИ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ
 Герман Эббингауз (Эббингхауз)
Герман Эббингауз (Эббингхауз) Gruppy_krovi
Gruppy_krovi Дискриминация и права человека. Лекция 2
Дискриминация и права человека. Лекция 2 Прямая. Прямые общего и частного положения
Прямая. Прямые общего и частного положения prez_dip_Korneeva
prez_dip_Korneeva Совместная деятельность детей и логопеда. Подготовительная группа для детей с ТНР, ОНР Тема Скоро в школу.
Совместная деятельность детей и логопеда. Подготовительная группа для детей с ТНР, ОНР Тема Скоро в школу. Знатоки искусства. Урок-викторина (3 класс)
Знатоки искусства. Урок-викторина (3 класс) Использование ИКТ в художественно-эстетическом развитии дошкольников
Использование ИКТ в художественно-эстетическом развитии дошкольников Структура итогового сочинения. 11 класс
Структура итогового сочинения. 11 класс Все начинается с любви…
Все начинается с любви… Острый живот. Внематочная беременность
Острый живот. Внематочная беременность Разработка группы жилых домов
Разработка группы жилых домов Презентация к уроку Биологическая роль кислорода
Презентация к уроку Биологическая роль кислорода Презентация План местности 6 класс
Презентация План местности 6 класс Динамика развития смены в детском оздоровительном лагере
Динамика развития смены в детском оздоровительном лагере Единый всекубанский классный час Год культуры - история Кубани в лицах, 4 класс
Единый всекубанский классный час Год культуры - история Кубани в лицах, 4 класс Россия в первой четверти XIX века. Политика Александра I (1801-1825)
Россия в первой четверти XIX века. Политика Александра I (1801-1825) Project: Global Social Media Plan // April Topic: World Party Day Format: video Date: 3 April
Project: Global Social Media Plan // April Topic: World Party Day Format: video Date: 3 April Нетрадиционные религии
Нетрадиционные религии Всенощное бдение. Утреня (окончание)
Всенощное бдение. Утреня (окончание) Инвестиционная деятельность предприятий (организаций)
Инвестиционная деятельность предприятий (организаций) Отчёт по производственной электромонтажной практике
Отчёт по производственной электромонтажной практике Самые удивительные и необычные деревья
Самые удивительные и необычные деревья Чтение - праздник души.
Чтение - праздник души. Сетевая карта (адаптер, плата)
Сетевая карта (адаптер, плата) Презентация к уроку технологии Оригами-сердечко ко Дню Святого Валентина
Презентация к уроку технологии Оригами-сердечко ко Дню Святого Валентина Книга 6 СМИД 2021
Книга 6 СМИД 2021 Интерактивная игра к классному часу Бородинское сражение 1 класс
Интерактивная игра к классному часу Бородинское сражение 1 класс