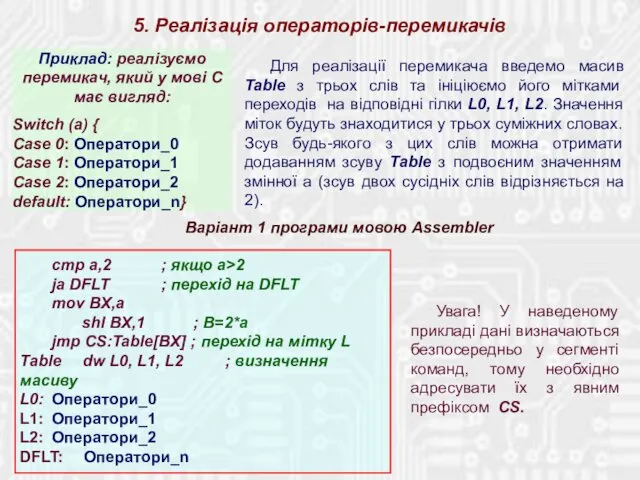
Приклад: реалізуємо перемикач, який у мові С
має вигляд:
Switch (a) {
Case 0:
Оператори_0
Case 1: Оператори_1
Case 2: Оператори_2
default: Оператори_n}
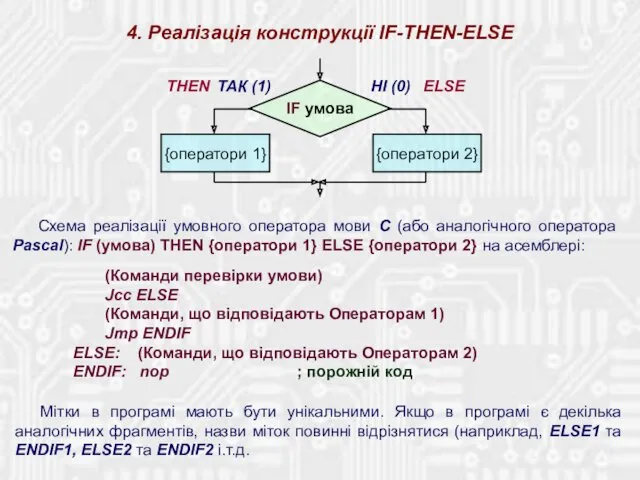
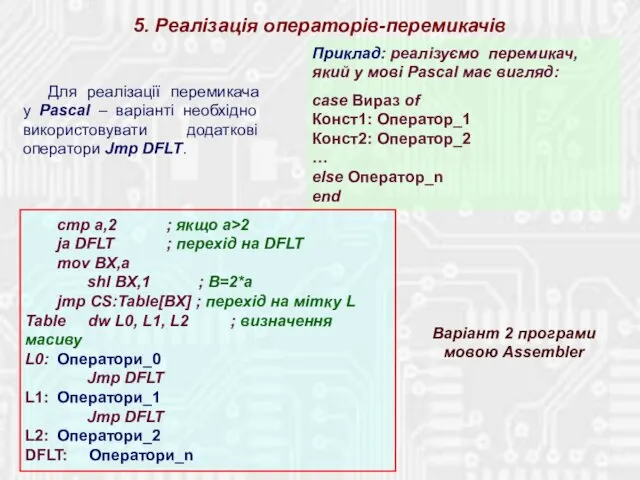
Для реалізації перемикача введемо масив Table з трьох слів та ініціюємо його мітками переходів на відповідні гілки L0, L1, L2. Значення міток будуть знаходитися у трьох суміжних словах. Зсув будь-якого з цих слів можна отримати додаванням зсуву Table з подвоєним значенням змінної a (зсув двох сусідніх слів відрізняється на 2).
cmp a,2 ; якщо а>2
ja DFLT ; перехід на DFLT
mov BX,a
shl BX,1 ; B=2*a
jmp CS:Table[BX] ; перехід на мітку L
Table dw L0, L1, L2 ; визначення масиву
L0: Оператори_0
L1: Оператори_1
L2: Оператори_2
DFLT: Оператори_n
Варіант 1 програми мовою Assembler
Увага! У наведеному прикладі дані визначаються безпосередньо у сегменті команд, тому необхідно адресувати їх з явним префіксом CS.
5. Реалізація операторів-перемикачів


 Психологический анализ рисунка семьи
Психологический анализ рисунка семьи Статистический эксперимент. Области применения имитационных моделей. Описание поведения систем
Статистический эксперимент. Области применения имитационных моделей. Описание поведения систем Религия примитивных народов
Религия примитивных народов История чумы
История чумы Организаторская деятельность руководителя хореографического коллектива
Организаторская деятельность руководителя хореографического коллектива Создание двигателя для экспедиций на другие планеты (двигателестроение)
Создание двигателя для экспедиций на другие планеты (двигателестроение) Организация исследовательской деятельности в условиях ФГОС НОО
Организация исследовательской деятельности в условиях ФГОС НОО AW101 Testomat Water Hardness Analyser
AW101 Testomat Water Hardness Analyser Вода и свойства воды.
Вода и свойства воды. Небылицы. Стихи и песенки из книги Рифмы матушки Гусыни
Небылицы. Стихи и песенки из книги Рифмы матушки Гусыни Формирование и оптимизация производственной программы строительной организации
Формирование и оптимизация производственной программы строительной организации Внеклассное мероприятие Знатоки
Внеклассное мероприятие Знатоки Крытые склады, грузовые механизмы этих складов. Устройство крытых железнодорожных складов
Крытые склады, грузовые механизмы этих складов. Устройство крытых железнодорожных складов Академия гражданской защиты МЧС России
Академия гражданской защиты МЧС России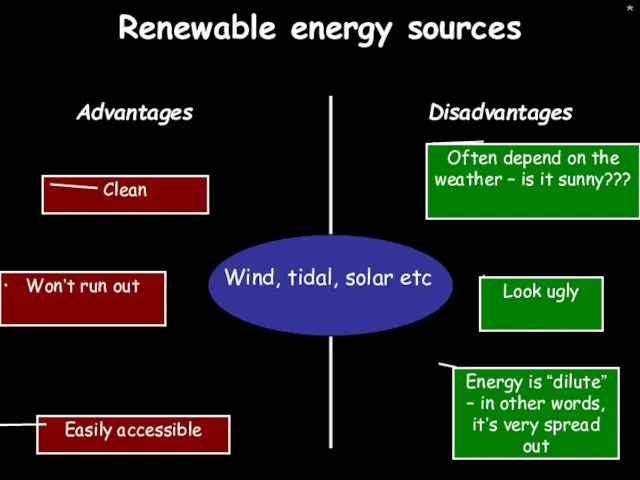 Renewable energy sources
Renewable energy sources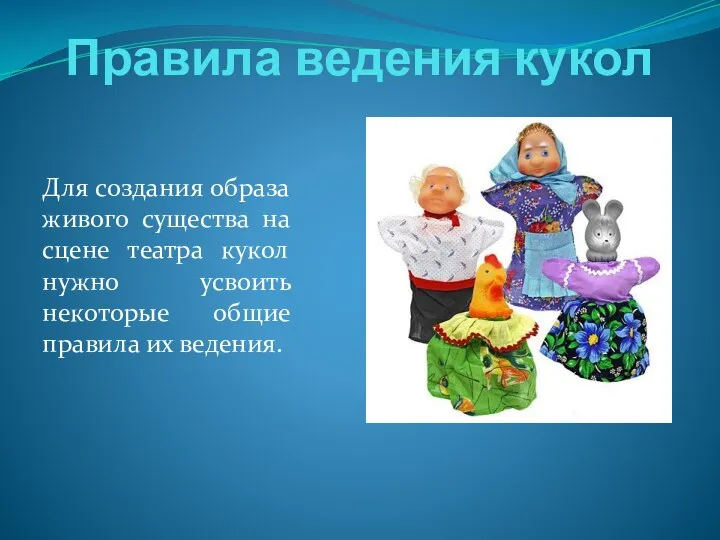 Презентация Правила ведения кукол
Презентация Правила ведения кукол Кадровая политика. Стратегии управления персонала
Кадровая политика. Стратегии управления персонала Изображение военных событий в романе Л. Н. Толстого Война и мир,
Изображение военных событий в романе Л. Н. Толстого Война и мир, Религиозные праздники России в XVI веке
Религиозные праздники России в XVI веке Проектирование технологических процессов ремонта деталей
Проектирование технологических процессов ремонта деталей По дороге к Победе
По дороге к Победе Шероховатость поверхности
Шероховатость поверхности Ко дню Матери
Ко дню Матери Робототехника. Виды робототехники
Робототехника. Виды робототехники Нормативно-правовая база введения ФГОС образования обучающихся с ограниченными возможностями здоровья
Нормативно-правовая база введения ФГОС образования обучающихся с ограниченными возможностями здоровья Оформление математического стенда
Оформление математического стенда Мир древности
Мир древности Корабли
Корабли