Лабиринт (для дистанционных соревнований). Требования к роботу. Отладка робота в Trik Studio презентация
- Лабиринт (для дистанционных соревнований). Требования к роботу. Отладка робота в Trik Studio

Содержание
- 2. Задача робота: Двигаясь внутри лабиринта, за время не более 3 минут, добраться из зоны старта в
- 3. Требования к роботу Для дистанционных соревнований «Лабиринт» робот строится на основе двухмоторной тележки из контроллера Lego
- 4. Для нахождения выхода из лабиринта применяют правило правой (левой) руки: Если двигаться по лабиринту, держась рукой
- 5. Для оптимизации программного кода, сначала не будем составлять полную диаграмму, а создадим три подпрограммы: «Вперед», «Направо»
- 6. Однако, как Вы заметили, если подпрограмма «Вперёд» настраивается достаточно просто, то после поворота налево и направо,
- 7. Так выглядит подпрограмма для поворота направо по энкодеру: Здесь намеренно искажены настройки блоков ожидания. Их вы
- 8. Так выглядит подпрограмма для поворота налево по энкодеру: Здесь намеренно искажены настройки блоков ожидания. Их вы
- 9. Но кроме энкодера, выполнить поворот можно и по гироскопическому датчику. Поворот направо по гиродатчику:
- 10. Поворот налево по гиродатчику: Напоминаю: Во всех примерах намеренно искажены настройки блоков ожидания. Их вы должны
- 11. Теперь, когда подпрограммы движений робота написаны, настроены и сохранены в коллекцию, можно приступить к сборке главного
- 12. Для точной настройки, можно встроить в ветки Диаграммы поведения робота остановки и задержки времени. Тогда вы
- 14. Скачать презентацию
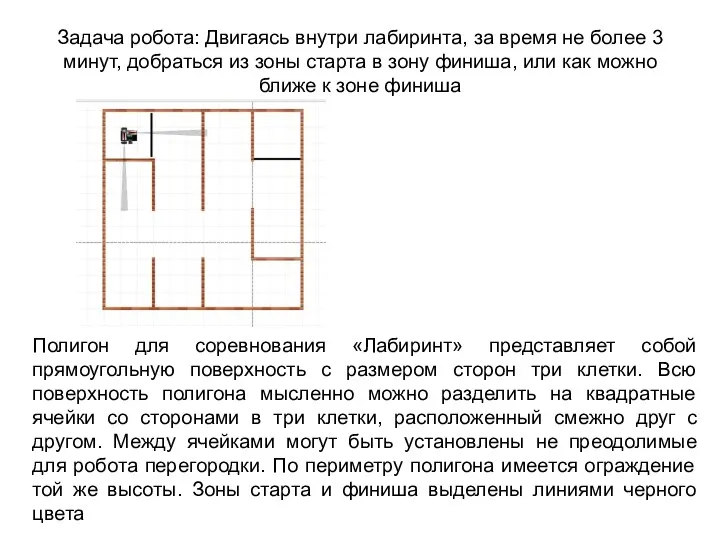
Задача робота: Двигаясь внутри лабиринта, за время не более 3 минут,
Задача робота: Двигаясь внутри лабиринта, за время не более 3 минут,

Требования к роботу
Для дистанционных соревнований «Лабиринт» робот строится на основе двухмоторной
Требования к роботу
Для дистанционных соревнований «Лабиринт» робот строится на основе двухмоторной
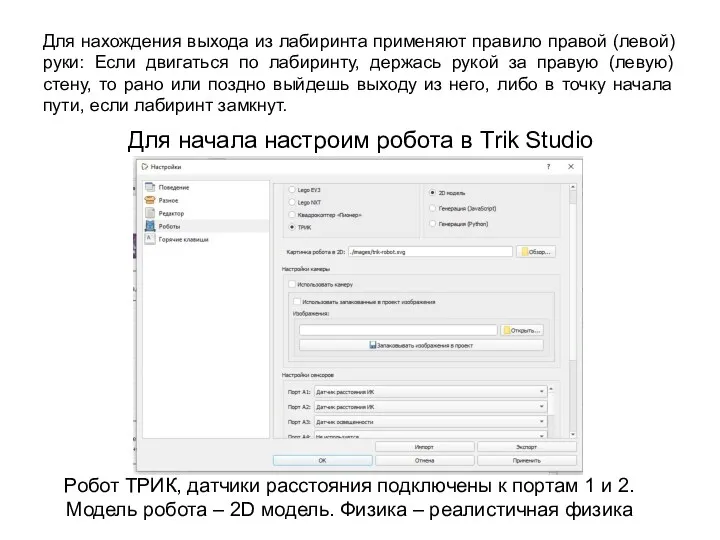
Для нахождения выхода из лабиринта применяют правило правой (левой) руки: Если
Для нахождения выхода из лабиринта применяют правило правой (левой) руки: Если
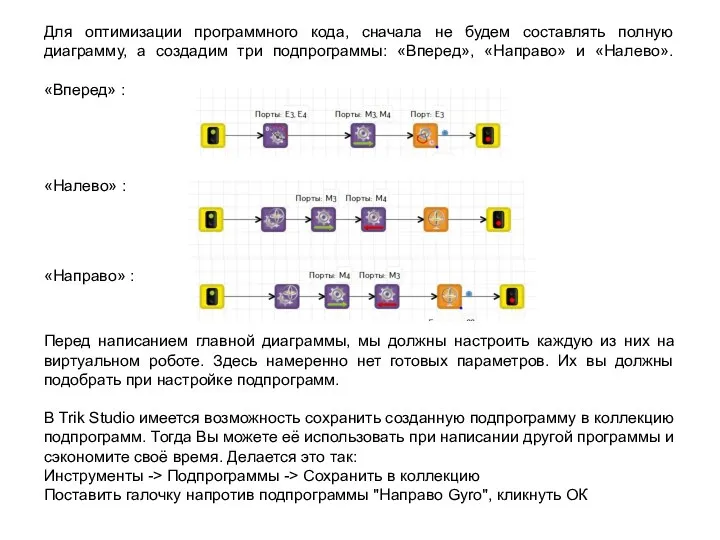
Для оптимизации программного кода, сначала не будем составлять полную диаграмму, а
Для оптимизации программного кода, сначала не будем составлять полную диаграмму, а
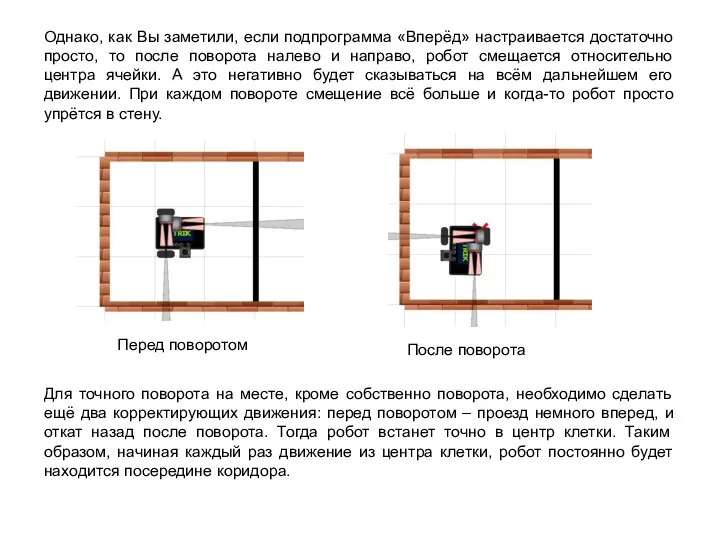
Однако, как Вы заметили, если подпрограмма «Вперёд» настраивается достаточно просто, то
Однако, как Вы заметили, если подпрограмма «Вперёд» настраивается достаточно просто, то
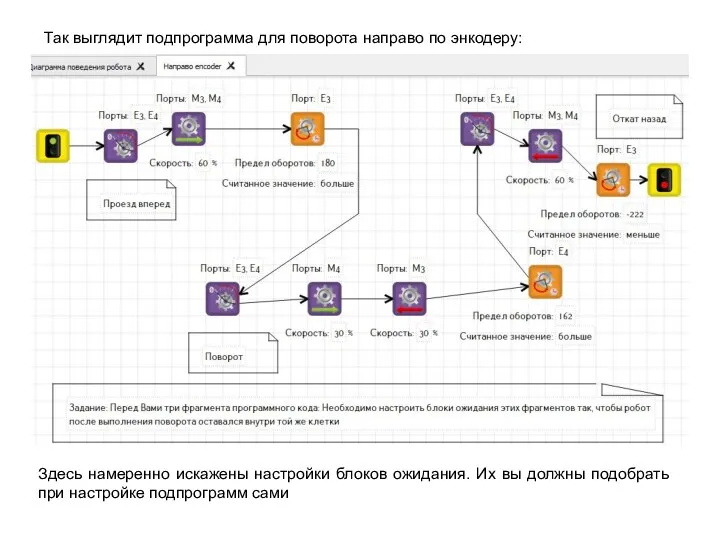
Так выглядит подпрограмма для поворота направо по энкодеру:
Здесь намеренно искажены настройки
Так выглядит подпрограмма для поворота направо по энкодеру:
Здесь намеренно искажены настройки
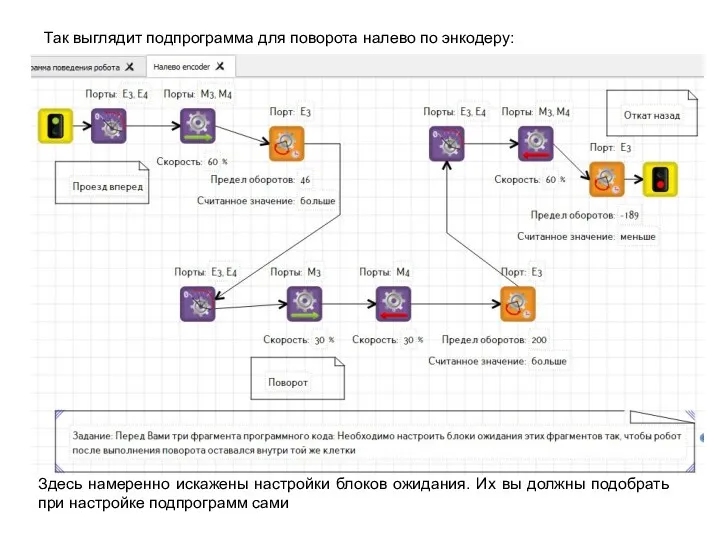
Так выглядит подпрограмма для поворота налево по энкодеру:
Здесь намеренно искажены настройки
Так выглядит подпрограмма для поворота налево по энкодеру:
Здесь намеренно искажены настройки
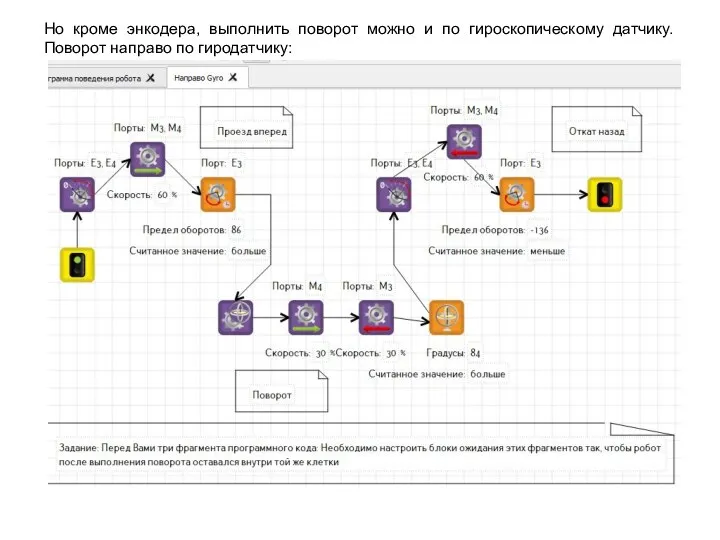
Но кроме энкодера, выполнить поворот можно и по гироскопическому датчику.
Поворот направо
Но кроме энкодера, выполнить поворот можно и по гироскопическому датчику. Поворот направо
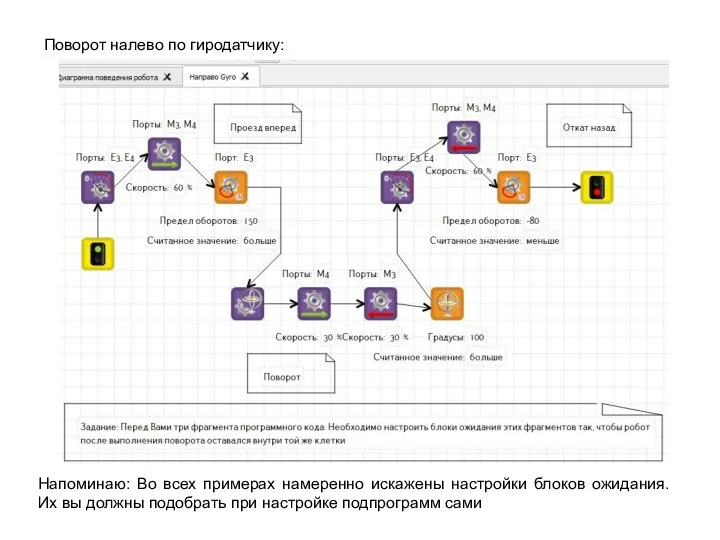
Поворот налево по гиродатчику:
Напоминаю: Во всех примерах намеренно искажены настройки блоков
Поворот налево по гиродатчику:
Напоминаю: Во всех примерах намеренно искажены настройки блоков
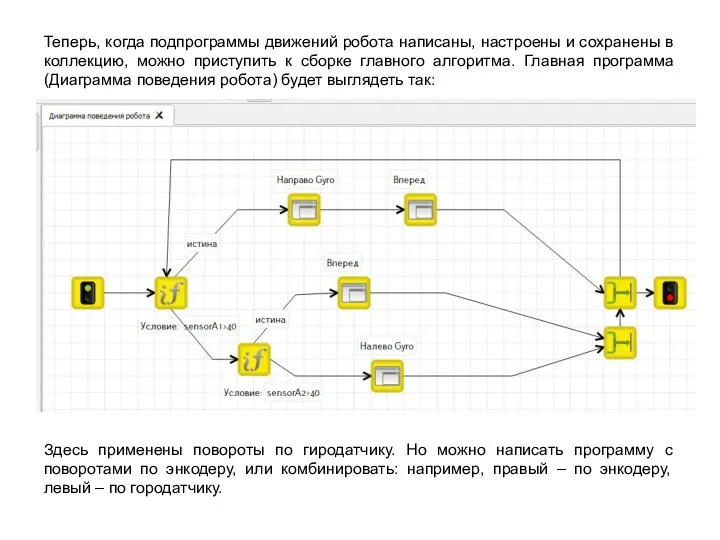
Теперь, когда подпрограммы движений робота написаны, настроены и сохранены в коллекцию,
Теперь, когда подпрограммы движений робота написаны, настроены и сохранены в коллекцию,
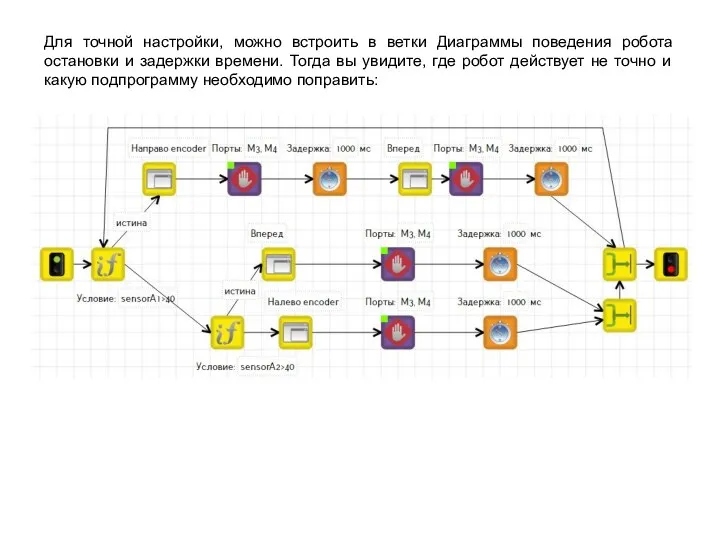
Для точной настройки, можно встроить в ветки Диаграммы поведения робота остановки
Для точной настройки, можно встроить в ветки Диаграммы поведения робота остановки
 Растения из Красной книги
Растения из Красной книги Игра Что? Где? Когда?
Игра Что? Где? Когда? Анатомия и физиология желудка. Лекция № 29
Анатомия и физиология желудка. Лекция № 29 Қол ұшы флегмонасы
Қол ұшы флегмонасы Производство ткани
Производство ткани Саша Черный. Образы детей в рассказах Кавказский пленник, Игорь-Робинзон
Саша Черный. Образы детей в рассказах Кавказский пленник, Игорь-Робинзон Динамика развития и структура мирового автомобилестроения
Динамика развития и структура мирового автомобилестроения Генераторы измерительных сигналов
Генераторы измерительных сигналов Сираҗетдин образы һәм акча мәсьәләсе
Сираҗетдин образы һәм акча мәсьәләсе Классный час Это праздник со слезами на глазах
Классный час Это праздник со слезами на глазах Викторина Азбука вежливости
Викторина Азбука вежливости Многонациональный Крым
Многонациональный Крым Разделка теста
Разделка теста Передача информации. Локальные и глобальные компьютерные сети
Передача информации. Локальные и глобальные компьютерные сети Теория обучения. Процесс обучения как часть целостного педагогического процесса
Теория обучения. Процесс обучения как часть целостного педагогического процесса Трудные книги Альберта Лиханова
Трудные книги Альберта Лиханова урок Карбоновые кислоты
урок Карбоновые кислоты Синтез линейных стационарных автоматических систем
Синтез линейных стационарных автоматических систем Классный час, для учеников 4-го класса
Классный час, для учеников 4-го класса Биологиялық ұлпалардың дыбыспен әрекеттесуінің физикалық негізі. Медицинада ультрадыбыстық зерттеулерді қолдану
Биологиялық ұлпалардың дыбыспен әрекеттесуінің физикалық негізі. Медицинада ультрадыбыстық зерттеулерді қолдану Поделка: Ёлочка из бумажной бахромы. 2 класс. УМК Планета знаний.
Поделка: Ёлочка из бумажной бахромы. 2 класс. УМК Планета знаний. урок №1 по модулю Основы православной культуры Россия - наша Родина
урок №1 по модулю Основы православной культуры Россия - наша Родина Глобальные проблемы современности
Глобальные проблемы современности Мой дом будущего
Мой дом будущего Оборудование для мойки тары
Оборудование для мойки тары Тепловой поверочный расчет парогазовой установки ПГУ-325
Тепловой поверочный расчет парогазовой установки ПГУ-325 Сайт одноклассники
Сайт одноклассники ГРИС Стрелочка
ГРИС Стрелочка