- Механические характеристики асинхронного двигателя в двигательном и тормозных режимах

Содержание
- 2. Влияние параметров сети и двигателя на механическую характеристику АД. 2. Механические характеристики АД в тормозных режимах.
- 3. 2 Знание механических характеристик АД необходимо для оценки работы двигателя: 1) при ухудшении качества электроэнергии в
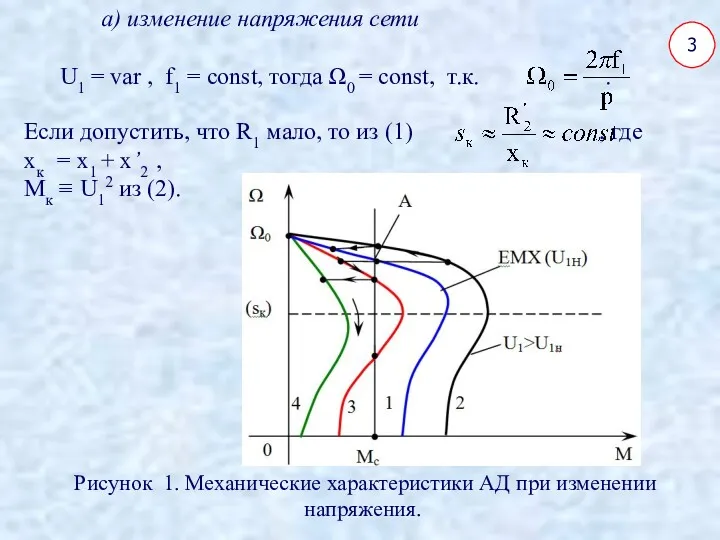
- 4. 3 а) изменение напряжения сети U1 = var , f1 = const, тогда Ω0 = const,
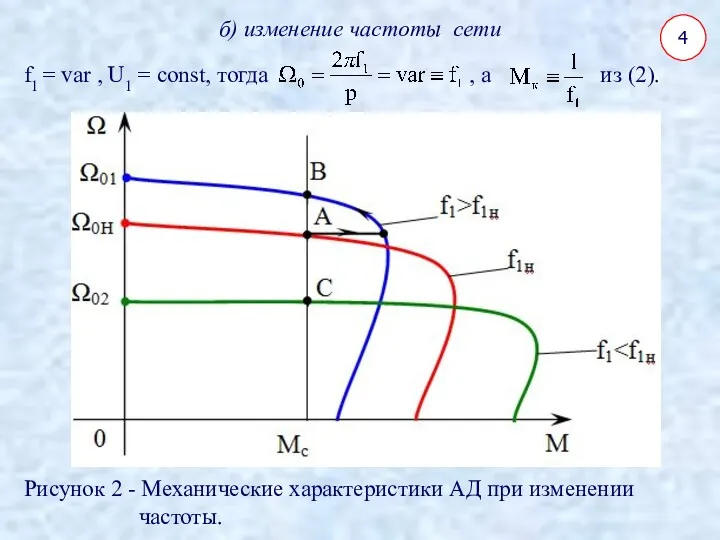
- 5. 4 б) изменение частоты сети f1 = var , U1 = const, тогда , а из
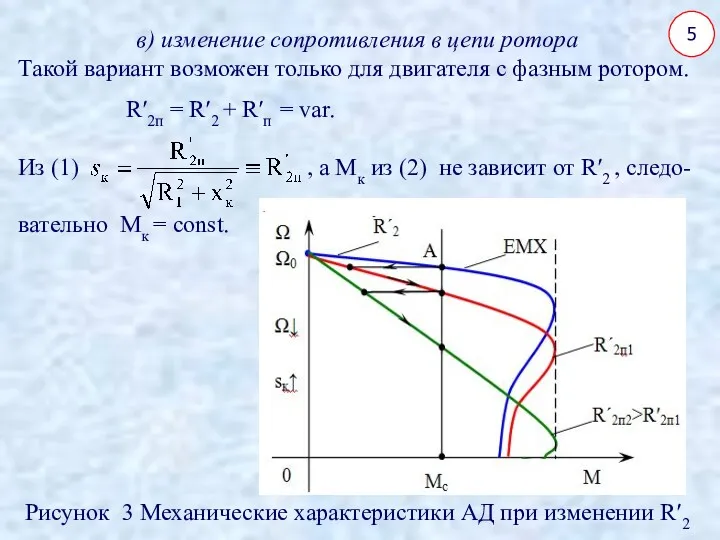
- 6. 5 в) изменение сопротивления в цепи ротора Такой вариант возможен только для двигателя с фазным ротором.
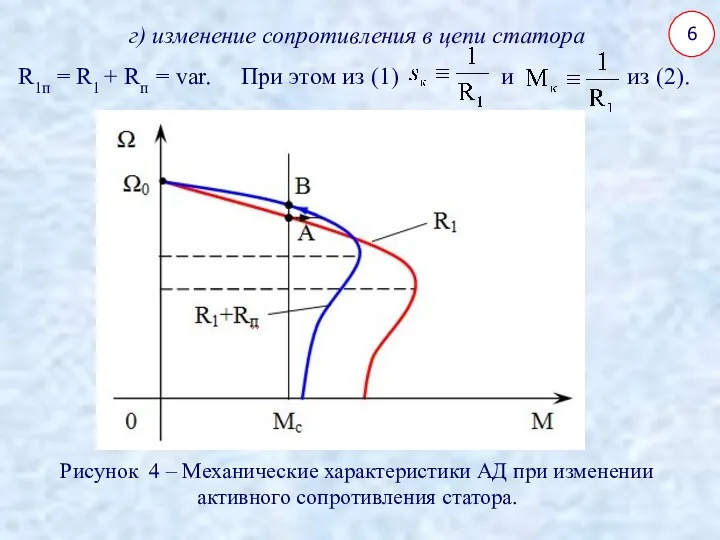
- 7. 6 г) изменение сопротивления в цепи статора R1п = R1 + Rп = var. При этом
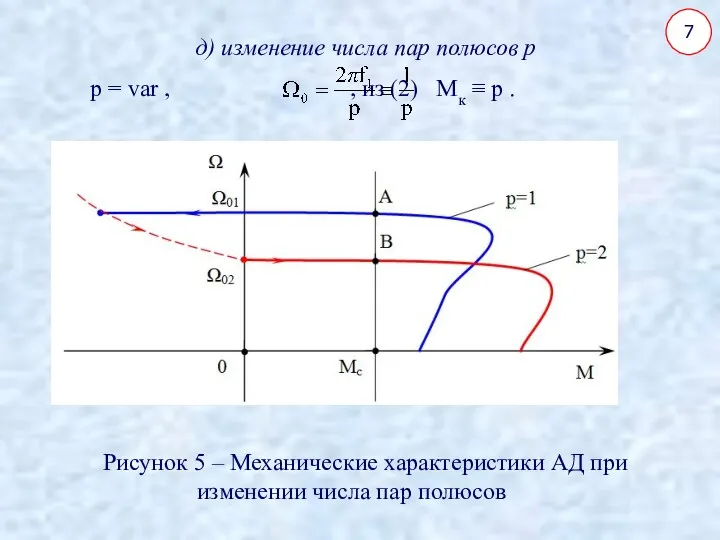
- 8. 7 д) изменение числа пар полюсов р р = vаr , , из (2) Mк ≡
- 9. 8 Для торможения АД могут применяться те же способы, что и для ЭД постоянного тока: 1)
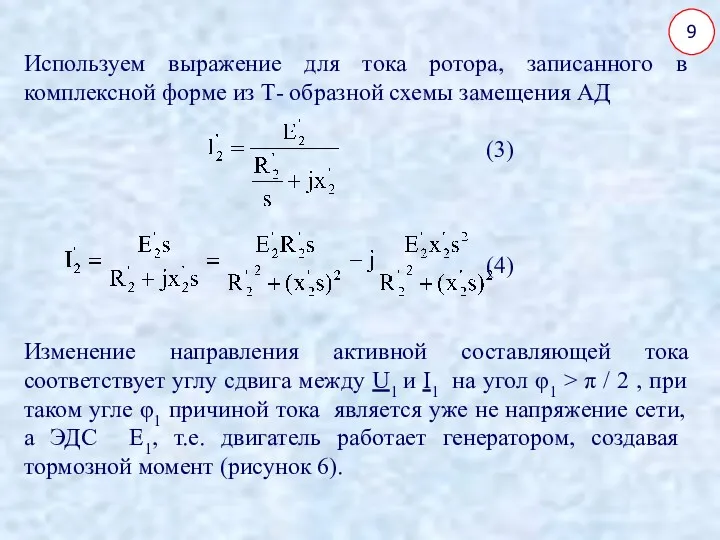
- 10. 9 Используем выражение для тока ротора, записанного в комплексной форме из Т- образной схемы замещения АД
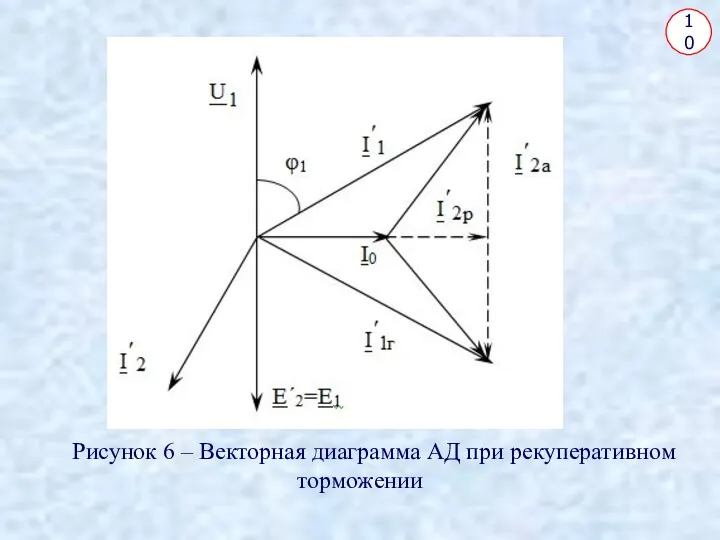
- 11. 10 Рисунок 6 – Векторная диаграмма АД при рекуперативном торможении
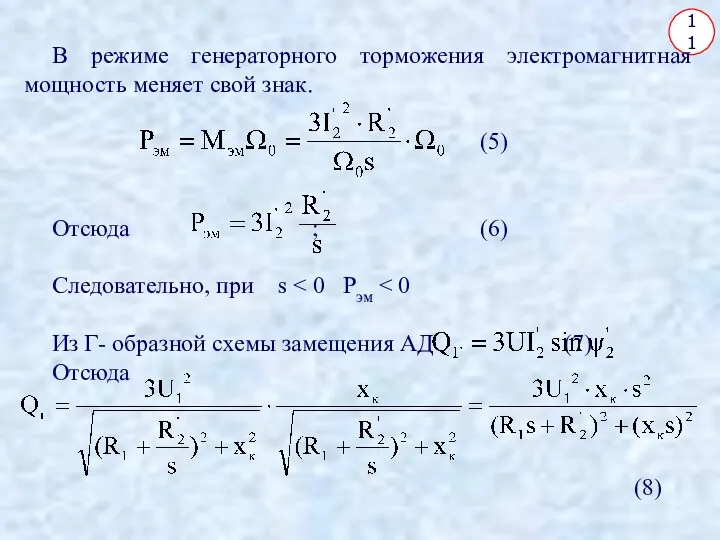
- 12. 11 В режиме генераторного торможения электромагнитная мощность меняет свой знак. (5) Отсюда ; (6) Следовательно, при
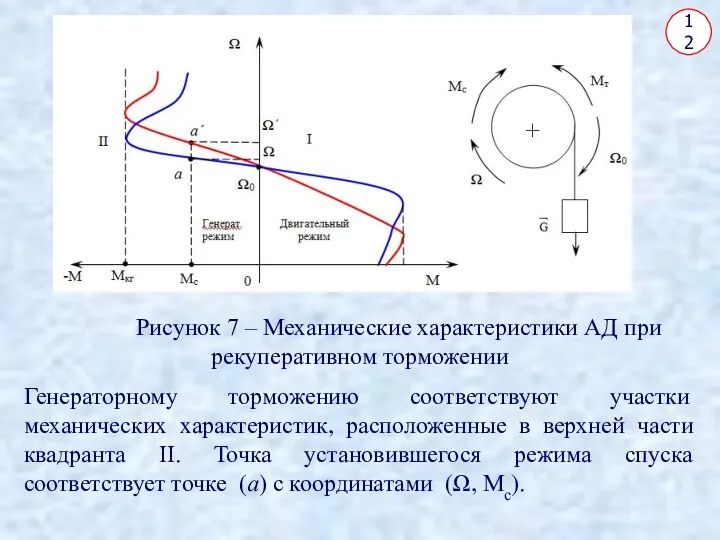
- 13. 12 Рисунок 7 – Механические характеристики АД при рекуперативном торможении Генераторному торможению соответствуют участки механических характеристик,
- 14. 13 Торможение с отдачей энергии в сеть будет иметь место также при уменьшении скорости асинхронного двигателя
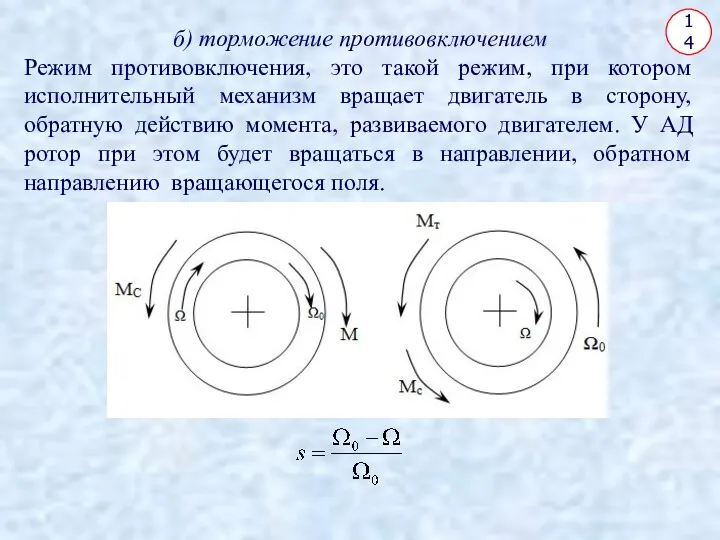
- 15. 14 б) торможение противовключением Режим противовключения, это такой режим, при котором исполнительный механизм вращает двигатель в
- 16. 15 Торможение противовключением можно получить, изменением очередности чередования фаз статора у вращающегося двигателя. При этом изменяется
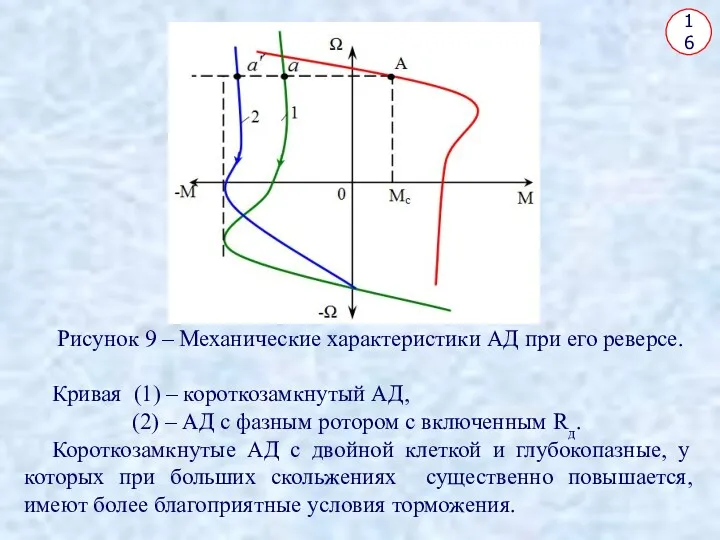
- 17. 16 Рисунок 9 – Механические характеристики АД при его реверсе. Кривая (1) – короткозамкнутый АД, (2)
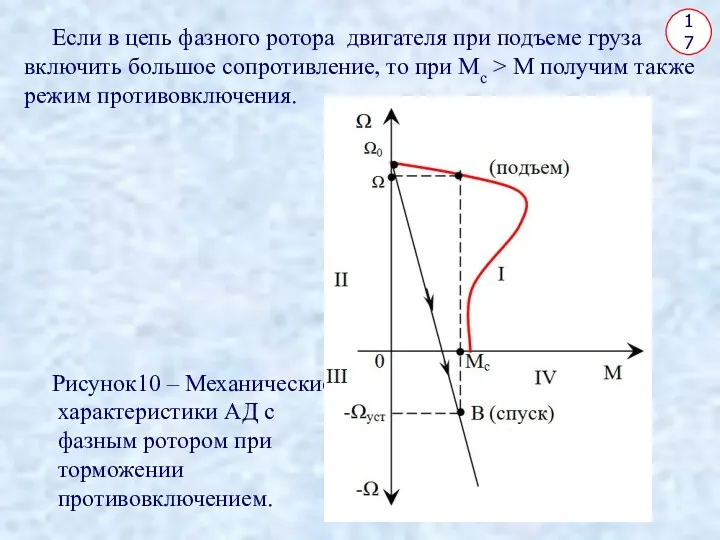
- 18. 17 Если в цепь фазного ротора двигателя при подъеме груза включить большое сопротивление, то при Mc
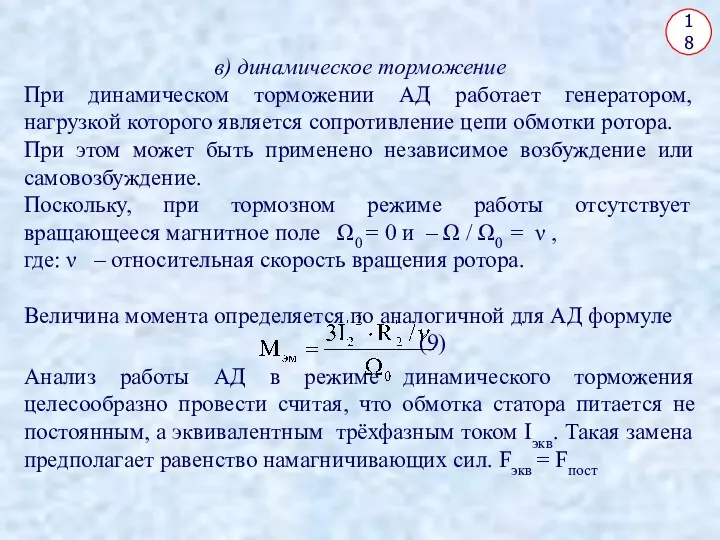
- 19. 18 в) динамическое торможение При динамическом торможении АД работает генератором, нагрузкой которого является сопротивление цепи обмотки
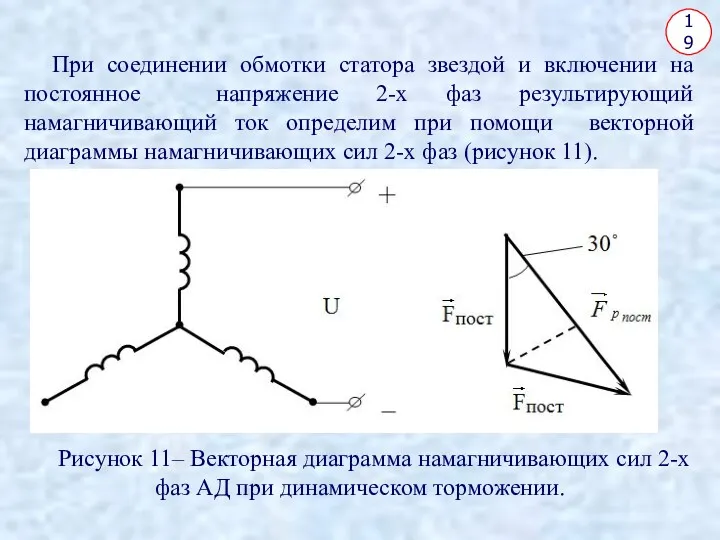
- 20. 19 При соединении обмотки статора звездой и включении на постоянное напряжение 2-х фаз результирующий намагничивающий ток
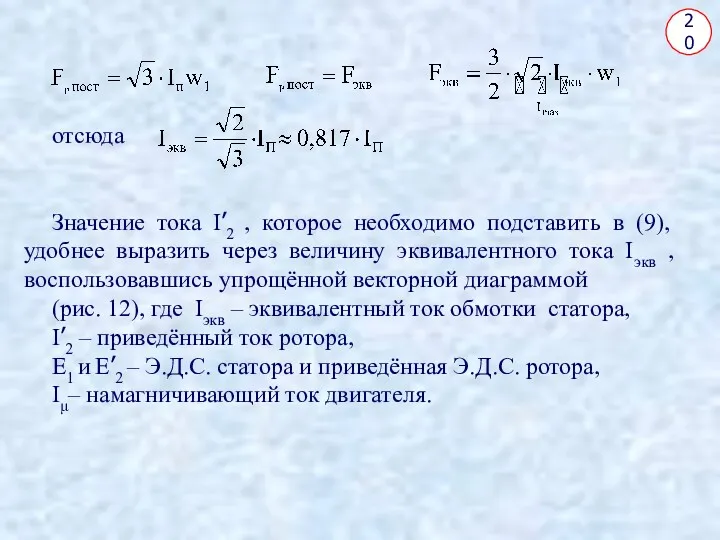
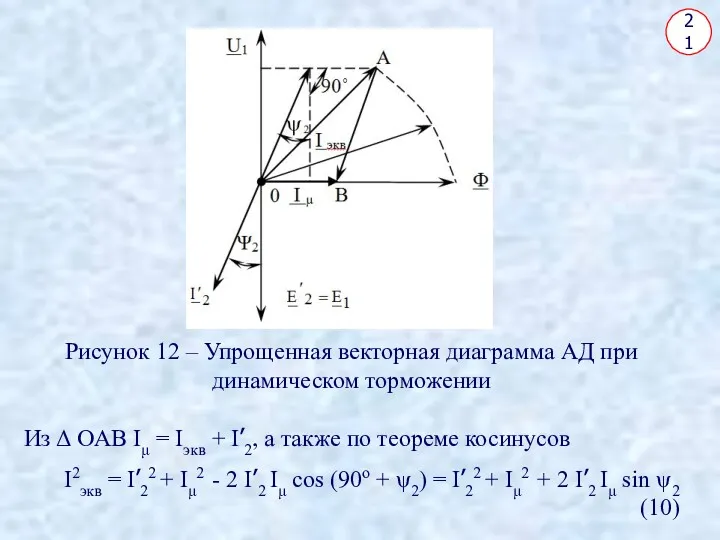
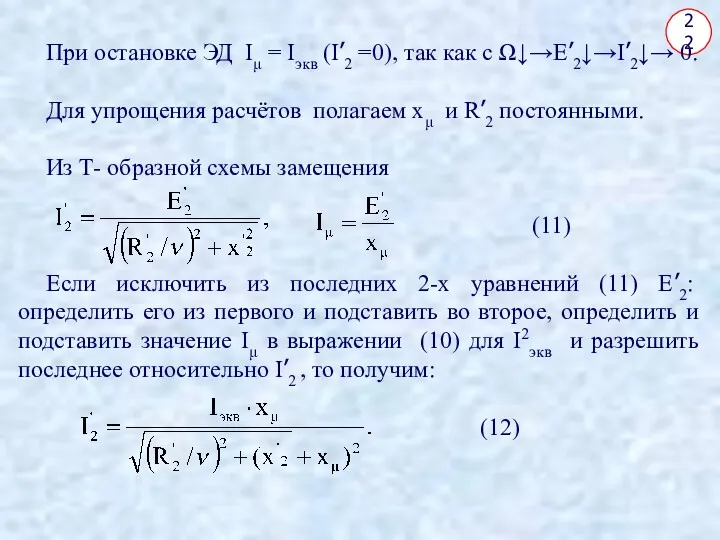
- 21. 20 отсюда Значение тока I’2 , которое необходимо подставить в (9), удобнее выразить через величину эквивалентного
- 22. 21 Рисунок 12 – Упрощенная векторная диаграмма АД при динамическом торможении Из Δ OAB Iμ =
- 23. 22 При остановке ЭД Iμ = Iэкв (I’2 =0), так как с Ω↓→E’2↓→I’2↓→ 0. Для упрощения
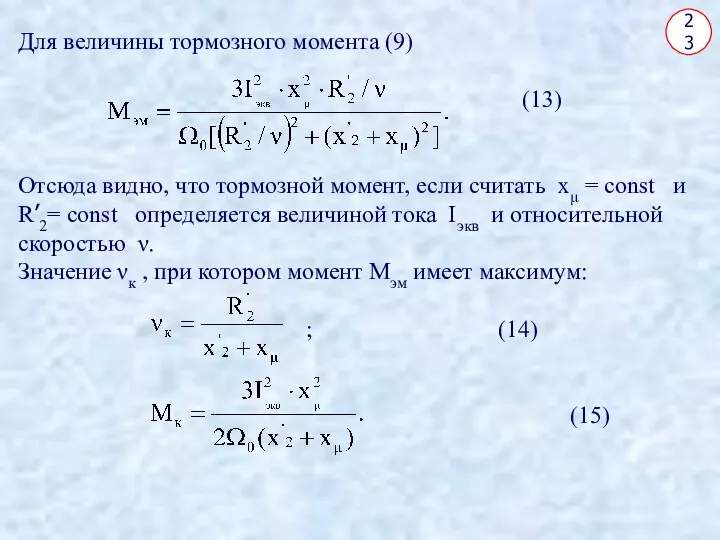
- 24. 23 Для величины тормозного момента (9) (13) Отсюда видно, что тормозной момент, если считать xμ =
- 26. Скачать презентацию
Влияние параметров сети и двигателя на механическую характеристику АД.
2. Механические
Влияние параметров сети и двигателя на механическую характеристику АД.
2. Механические
2
Знание механических характеристик АД необходимо для оценки работы двигателя:
1) при ухудшении
2
Знание механических характеристик АД необходимо для оценки работы двигателя:
1) при ухудшении
3
а) изменение напряжения сети
U1 = var , f1 =
3
а) изменение напряжения сети
U1 = var , f1 =
4
б) изменение частоты сети
f1 = var , U1 = const,
4
б) изменение частоты сети
f1 = var , U1 = const,
5
в) изменение сопротивления в цепи ротора
Такой вариант возможен только для
5
в) изменение сопротивления в цепи ротора
Такой вариант возможен только для
6
г) изменение сопротивления в цепи статора
R1п = R1 + Rп
6
г) изменение сопротивления в цепи статора
R1п = R1 + Rп
7
д) изменение числа пар полюсов р
р = vаr , , из
7
д) изменение числа пар полюсов р
р = vаr , , из
8
Для торможения АД могут применяться те же способы, что и для
8
Для торможения АД могут применяться те же способы, что и для
9
Используем выражение для тока ротора, записанного в комплексной форме из Т-
9
Используем выражение для тока ротора, записанного в комплексной форме из Т-
10
Рисунок 6 – Векторная диаграмма АД при рекуперативном торможении
10
Рисунок 6 – Векторная диаграмма АД при рекуперативном торможении
11
В режиме генераторного торможения электромагнитная мощность меняет свой знак.
(5)
Отсюда ; (6)
Следовательно,
11
В режиме генераторного торможения электромагнитная мощность меняет свой знак.
(5)
Отсюда ; (6)
Следовательно,
12
Рисунок 7 – Механические характеристики АД при рекуперативном торможении
Генераторному торможению
12
Рисунок 7 – Механические характеристики АД при рекуперативном торможении
Генераторному торможению
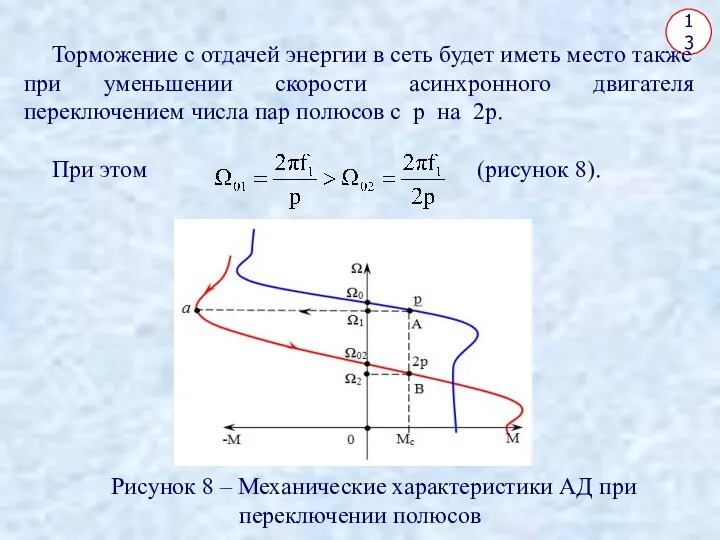
13
Торможение с отдачей энергии в сеть будет иметь место также при
13
Торможение с отдачей энергии в сеть будет иметь место также при
14
б) торможение противовключением
Режим противовключения, это такой режим, при котором исполнительный механизм
14
б) торможение противовключением
Режим противовключения, это такой режим, при котором исполнительный механизм
15
Торможение противовключением можно получить, изменением очередности чередования фаз статора у вращающегося
15
Торможение противовключением можно получить, изменением очередности чередования фаз статора у вращающегося
16
Рисунок 9 – Механические характеристики АД при его реверсе.
Кривая (1) –
16
Рисунок 9 – Механические характеристики АД при его реверсе.
Кривая (1) –
17
Если в цепь фазного ротора двигателя при подъеме груза включить большое
17
Если в цепь фазного ротора двигателя при подъеме груза включить большое
18
в) динамическое торможение
При динамическом торможении АД работает генератором, нагрузкой которого является
18
в) динамическое торможение
При динамическом торможении АД работает генератором, нагрузкой которого является
19
При соединении обмотки статора звездой и включении на постоянное напряжение 2-х
19
При соединении обмотки статора звездой и включении на постоянное напряжение 2-х
20
отсюда
Значение тока I’2 , которое необходимо подставить в (9), удобнее выразить
20
отсюда
Значение тока I’2 , которое необходимо подставить в (9), удобнее выразить
21
Рисунок 12 – Упрощенная векторная диаграмма АД при динамическом торможении
Из Δ
21
Рисунок 12 – Упрощенная векторная диаграмма АД при динамическом торможении
Из Δ
22
При остановке ЭД Iμ = Iэкв (I’2 =0), так как с
22
При остановке ЭД Iμ = Iэкв (I’2 =0), так как с
23
Для величины тормозного момента (9)
(13)
Отсюда видно, что тормозной момент, если
23
Для величины тормозного момента (9)
(13)
Отсюда видно, что тормозной момент, если
 Декоративный пейзаж. Морское дно
Декоративный пейзаж. Морское дно КЭП Электронная подпись на носителе
КЭП Электронная подпись на носителе Презентация кабинета химии
Презентация кабинета химии Архитектурная типология, формы и понятия
Архитектурная типология, формы и понятия Электронная почта
Электронная почта Оптимизация технологических процессов
Оптимизация технологических процессов Презентация Обычаи осетинского народа
Презентация Обычаи осетинского народа Острые отравления окисью углерода, амидо- и нитросоединениями
Острые отравления окисью углерода, амидо- и нитросоединениями Налоговый учет и отчетность
Налоговый учет и отчетность Тест по истории Санкт-Петербурга
Тест по истории Санкт-Петербурга Портфолио - важнейший элемент практико-ориентированного подхода к образованию
Портфолио - важнейший элемент практико-ориентированного подхода к образованию Проектирование навесных вентилируемых фасадов
Проектирование навесных вентилируемых фасадов Организация работы с документами
Организация работы с документами Графика
Графика Презентация к уроку географии Животный мир Австралии
Презентация к уроку географии Животный мир Австралии Автоматизация звука [Ш]. Упражнение Больше-меньше
Автоматизация звука [Ш]. Упражнение Больше-меньше Глагол to be
Глагол to be Решение задач на проценты. Нахождение процента от числа
Решение задач на проценты. Нахождение процента от числа Музей Казачьего быта глазами нового поколения
Музей Казачьего быта глазами нового поколения Денежные выплаты (пособия) в связи с материнством, отцовством и детством
Денежные выплаты (пособия) в связи с материнством, отцовством и детством Внешняя политика. Русско-японская война 1904-1905 гг
Внешняя политика. Русско-японская война 1904-1905 гг Профессии будущего
Профессии будущего Разведение домашних кроликов. Урок естествознания в 8 классе
Разведение домашних кроликов. Урок естествознания в 8 классе Презентация к практикуму Создание благоприятного психологического климата
Презентация к практикуму Создание благоприятного психологического климата Ароматические углеводороды. Арены
Ароматические углеводороды. Арены Организация внутреннего аудита операций цикла финансовой отчетности
Организация внутреннего аудита операций цикла финансовой отчетности Синквейн - новая технология в развитии речи дошкольников
Синквейн - новая технология в развитии речи дошкольников Частичка меня
Частичка меня