Микропроцессорные средства управления в электроэнергетике. Архитектура РЗ. Микропроцессорные РЗ презентация
- Микропроцессорные средства управления в электроэнергетике. Архитектура РЗ. Микропроцессорные РЗ

Содержание
- 2. Тема лекции: Архитектура РЗ. Микропроцессорные РЗ Канд. техн. наук КОЗЛОВ А.Н. Микропроцессорные средства управления в электроэнергетике
- 3. Презентации по курсу лекций обсуждены на заседании кафедры энергетики «15» _____11______2013__ г., протокол № ___4________ Заведующий
- 4. Основные понятия об архитектуре РЗ По своему функциональному назначению устройства РЗ являются решающими устройствами. При организации
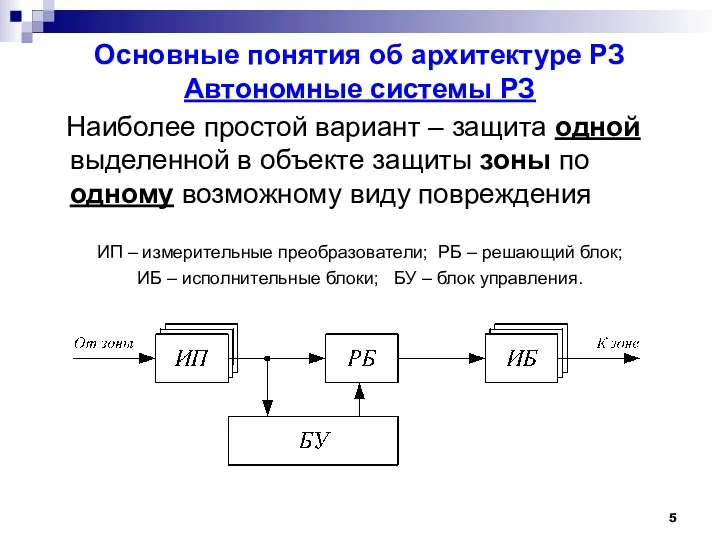
- 5. Основные понятия об архитектуре РЗ Автономные системы РЗ Наиболее простой вариант – защита одной выделенной в
- 6. Автономные системы РЗ (АРЗ) РБ реализует какой-либо один алгоритм выявления повреждения (максимально-токовый, дифференциальный и т.п.); БУ
- 7. Комплексные системы РЗ (КРЗ) Предназначены для защиты одной из выделенных в объекте защиты зон (например, генератора
- 8. Структурная схема КРЗ
- 9. Централизованные системы РЗ (ЦРЗ) Предназначены для защиты нескольких зон по одному из возможных видов повреждений. На
- 10. Структурная схема ЦРЗ
- 11. Структурная схема УРЗ
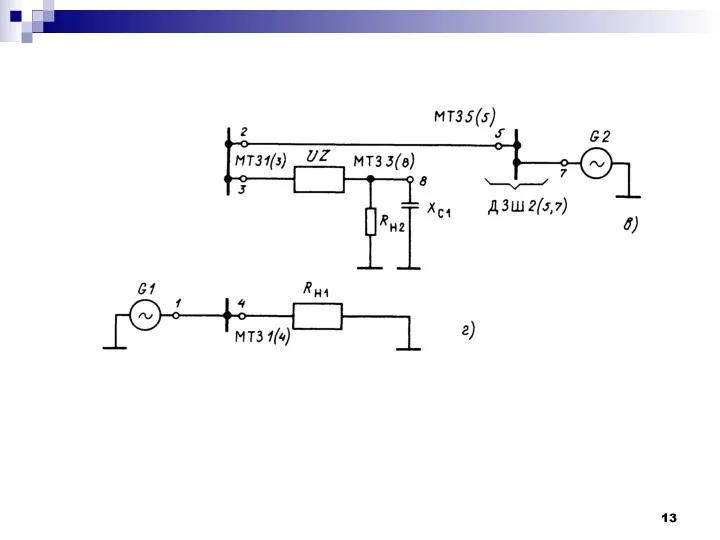
- 12. Влияние топологии сети на функциональный состав системы РЗ
- 14. Структурная схема алгоритма дифференциальной защиты генератора Блоки 3-5 по сигналу таймера в течение периода дискретизации вводят
- 15. 2,0 мс = 2 миллисекунды = 0,002 с 338 мкс = 338 микросекунд = 0,000338 с
- 17. Время преобразования порции (кванта) информации о контролируемом параметре режима:
- 22. Суть принципа заключается в гибкой перестройке системы РЗ в реальном масштабе времени с обеспечением автоматического перебора
- 23. Решения о том, какие структуры РЗ целесообразно применять для той или иной конфигурации ОЗ, возникающей в
- 24. СИСТЕМА МПРЗ С АСИНХРОННЫМ ПЕРЕФОРМИРОВАНИЕМ СТРУКТУР Для ЭЭС, конфигурация которых в процессе эксплуатации и аварийных переключений
- 25. Скоммутированное устройство РЗ существует до тех пор, пока не произойдет изменение топологии сети, после которой аналогичным
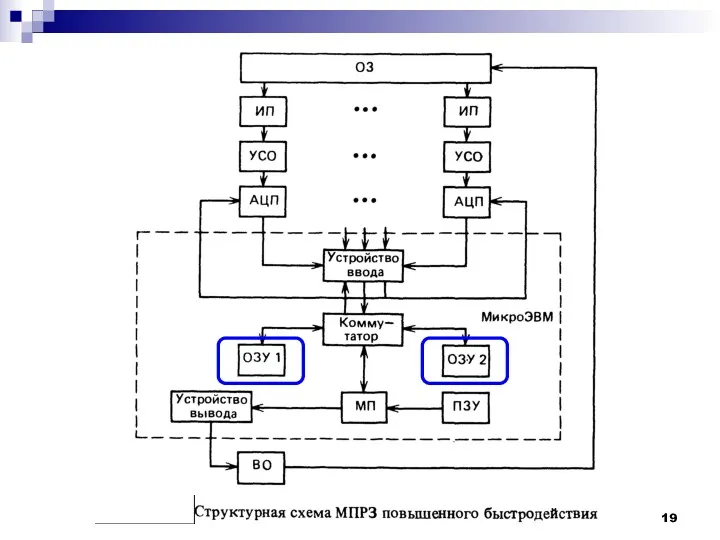
- 26. Универсальная микропроцессорная релейная защита с циклической перекоммутацией функциональных узлов Проблема обеспечения быстродействия снимается за счет аналоговой
- 27. Защита с жесткой архитектурой Защита с гибкой архитектурой
- 28. Традиционная реализация РЗ (первый вариант – жесткая архитектура) предусматривает использование 19 достаточно сложных ФУ, причем многие
- 29. Второй вариант построения РЗ (гибкая архитектура) предполагает рациональное использование минимального набора ФУ за счет их периодической
- 30. Устройство РЗ содержит измерительные преобразователи параметров защищаемого объекта ИПТ, ИПН, многоканальный управляемый источник опорных сигналов ИОС,
- 31. Получив из ПЗУ задание, УУ реализует коммутационный граф, настраивая ключи УКС. Одновременно с этим УУ настраивает
- 32. Если в процессе работы при реализации некоторой j -й структуры будет выявлено повреждение в пределах защищаемых
- 33. Наихудший вариант: возникновение КЗ вида, выявляемого структурой II, но в момент времени t0, пришедшийся на интервал
- 34. В общем случае будет иметь место задержка tзад в срабатывании защиты, максимальное значение которой может достигать
- 35. ГТИ – генератор тактовых импульсов
- 36. Получив из ПЗУ задание, УУ реализует коммутационный граф, настраивая ключи УКС. Одновременно с этим УУ настраивает
- 37. ПРОГНОЗИРУЮЩИЕ ГИБКИЕ РЗ НА БАЗЕ СПЕЦИАЛИЗИРОВАННЫХ МП Известно, что операция прогнозирования (предсказания), состоит в точном или
- 38. Прогнозирующие РЗ в начальный момент развития повреждения прогнозируют развитие аварийной ситуации и принимают решение об отключении
- 39. Для сравнения используем значения относительной чувствительности ПРЗ Коэффициент аппаратной сложности также используем относительный, принимая за базу
- 41. Скачать презентацию
Тема лекции:
Архитектура РЗ.
Микропроцессорные РЗ
Канд. техн. наук КОЗЛОВ А.Н.
Микропроцессорные средства управления
в
Архитектура РЗ.
Микропроцессорные РЗ
Канд. техн. наук КОЗЛОВ А.Н.
Микропроцессорные средства управления
в
Презентации по курсу лекций обсуждены на заседании кафедры энергетики
«15» _____11______2013__ г.,
Презентации по курсу лекций обсуждены на заседании кафедры энергетики
«15» _____11______2013__ г.,
Основные понятия об архитектуре РЗ
По своему функциональному назначению устройства РЗ
Основные понятия об архитектуре РЗ
По своему функциональному назначению устройства РЗ
Основные понятия об архитектуре РЗ
Автономные системы РЗ
Наиболее простой вариант –
Основные понятия об архитектуре РЗ
Автономные системы РЗ
Наиболее простой вариант –
Автономные системы РЗ (АРЗ)
РБ реализует какой-либо один алгоритм выявления повреждения (максимально-токовый,
Автономные системы РЗ (АРЗ)
РБ реализует какой-либо один алгоритм выявления повреждения (максимально-токовый,
Комплексные системы РЗ (КРЗ)
Предназначены для защиты одной из выделенных в
Комплексные системы РЗ (КРЗ)
Предназначены для защиты одной из выделенных в
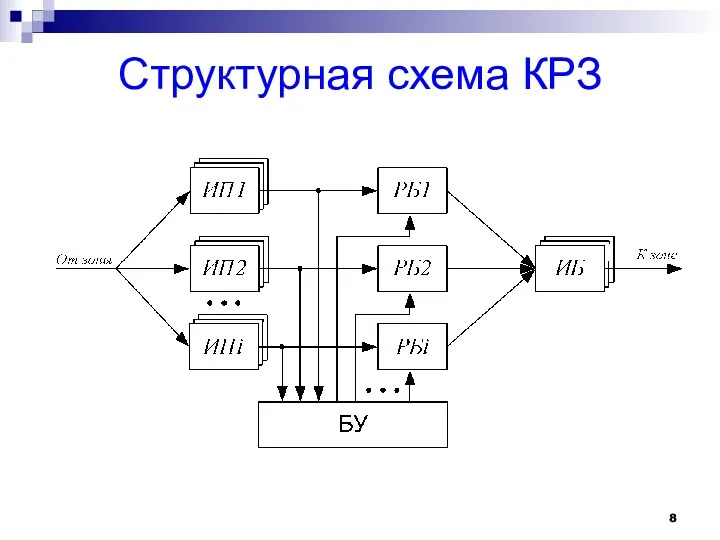
Структурная схема КРЗ
Структурная схема КРЗ
Централизованные системы РЗ (ЦРЗ)
Предназначены для защиты нескольких зон по одному
Централизованные системы РЗ (ЦРЗ)
Предназначены для защиты нескольких зон по одному
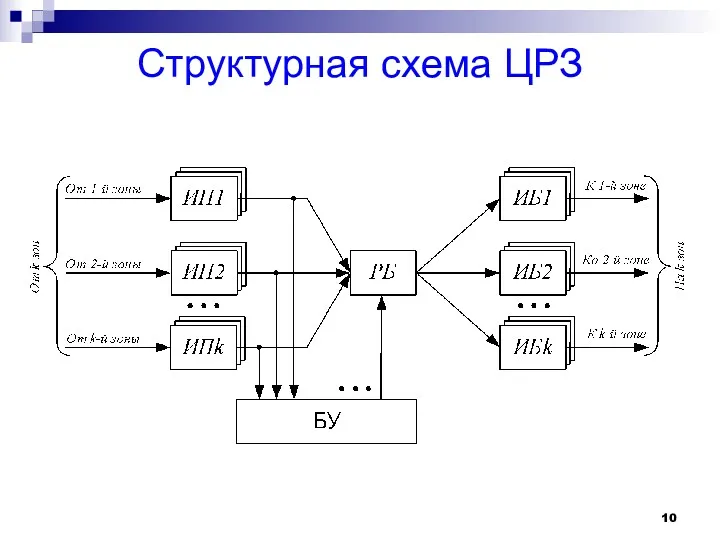
Структурная схема ЦРЗ
Структурная схема ЦРЗ
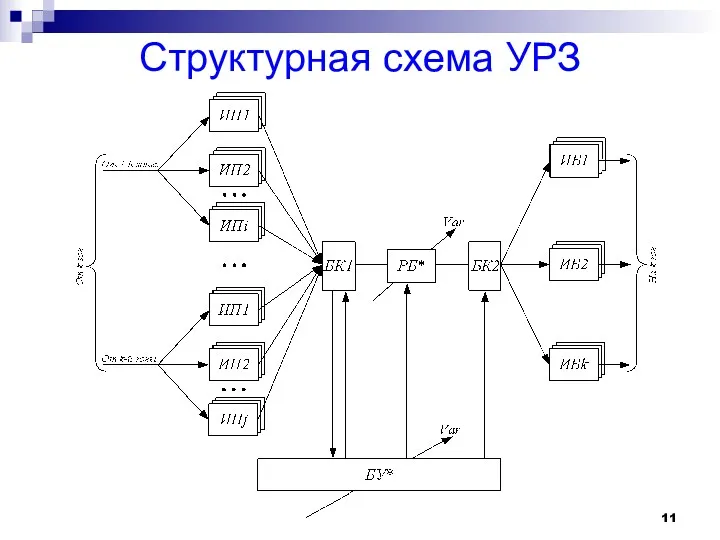
Структурная схема УРЗ
Структурная схема УРЗ
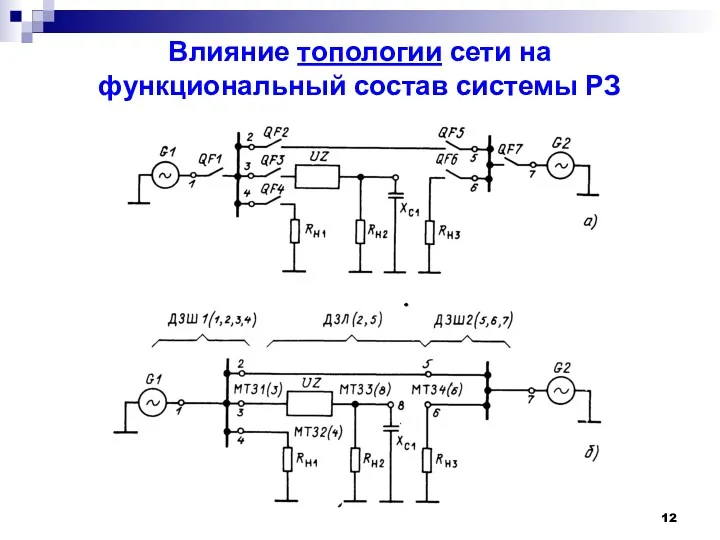
Влияние топологии сети на функциональный состав системы РЗ
Влияние топологии сети на функциональный состав системы РЗ
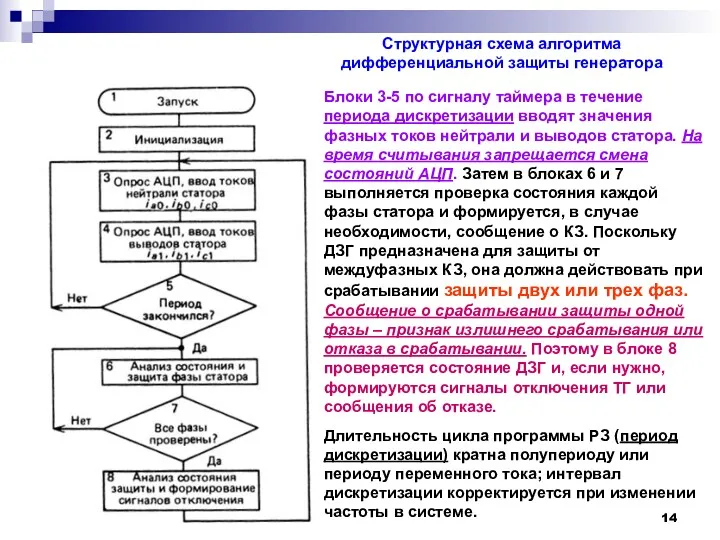
Структурная схема алгоритма дифференциальной защиты генератора
Блоки 3-5 по сигналу таймера в
Структурная схема алгоритма дифференциальной защиты генератора
Блоки 3-5 по сигналу таймера в
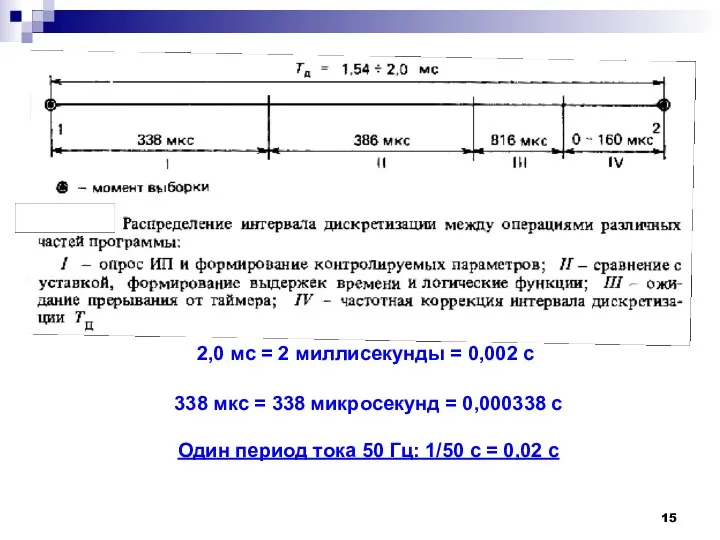
2,0 мс = 2 миллисекунды = 0,002 с
338 мкс =
2,0 мс = 2 миллисекунды = 0,002 с
338 мкс =
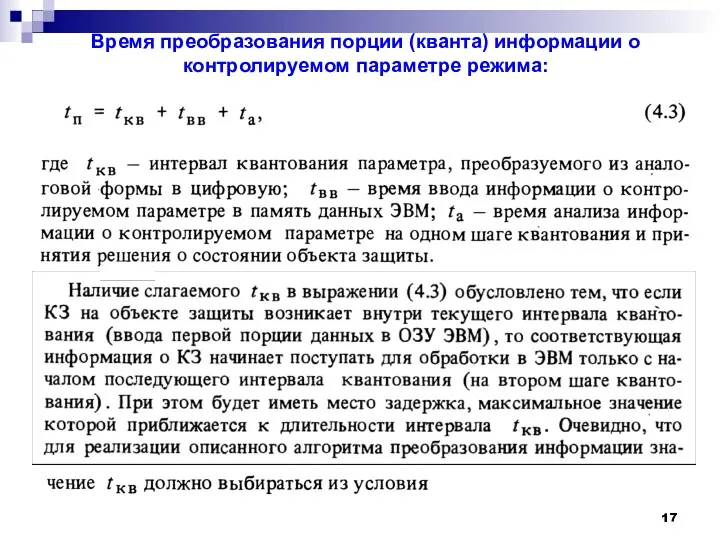
Время преобразования порции (кванта) информации о контролируемом параметре режима:
Время преобразования порции (кванта) информации о контролируемом параметре режима:
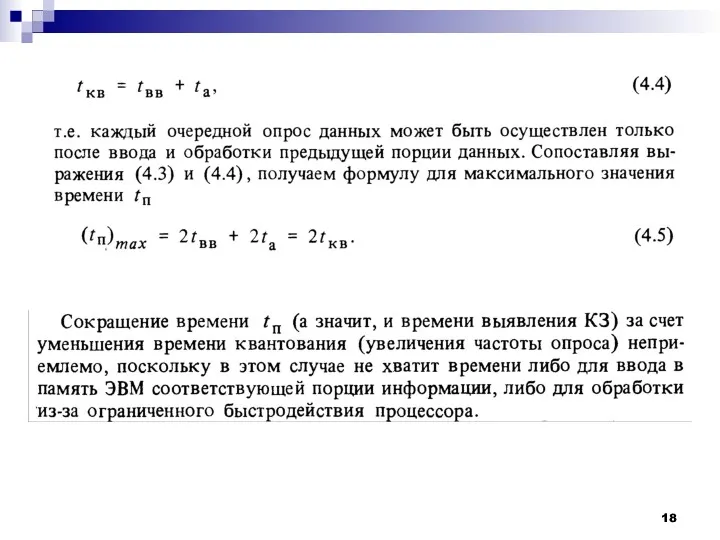
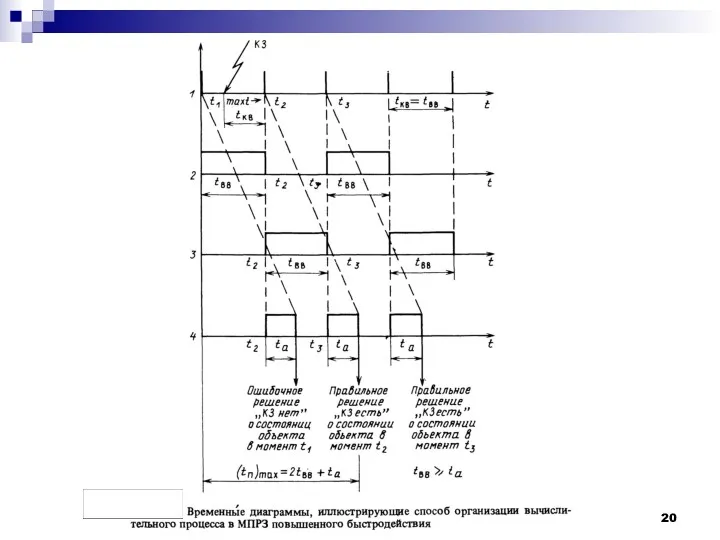
Суть принципа заключается в гибкой перестройке системы РЗ в реальном масштабе
Суть принципа заключается в гибкой перестройке системы РЗ в реальном масштабе
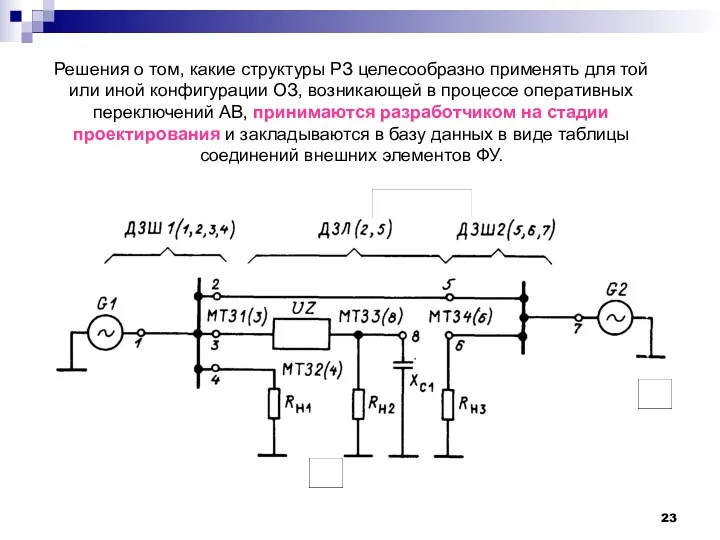
Решения о том, какие структуры РЗ целесообразно применять для той или
Решения о том, какие структуры РЗ целесообразно применять для той или
СИСТЕМА МПРЗ С АСИНХРОННЫМ ПЕРЕФОРМИРОВАНИЕМ СТРУКТУР
Для ЭЭС, конфигурация которых в
СИСТЕМА МПРЗ С АСИНХРОННЫМ ПЕРЕФОРМИРОВАНИЕМ СТРУКТУР
Для ЭЭС, конфигурация которых в
Скоммутированное устройство РЗ существует до тех пор, пока не произойдет изменение
Скоммутированное устройство РЗ существует до тех пор, пока не произойдет изменение
Универсальная микропроцессорная релейная защита с циклической перекоммутацией функциональных узлов
Проблема обеспечения
Универсальная микропроцессорная релейная защита с циклической перекоммутацией функциональных узлов
Проблема обеспечения
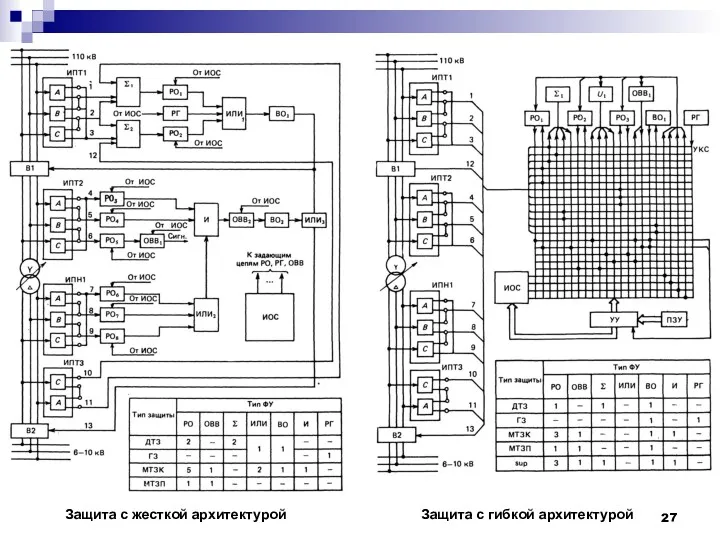
Защита с жесткой архитектурой
Защита с гибкой архитектурой
Защита с жесткой архитектурой
Защита с гибкой архитектурой
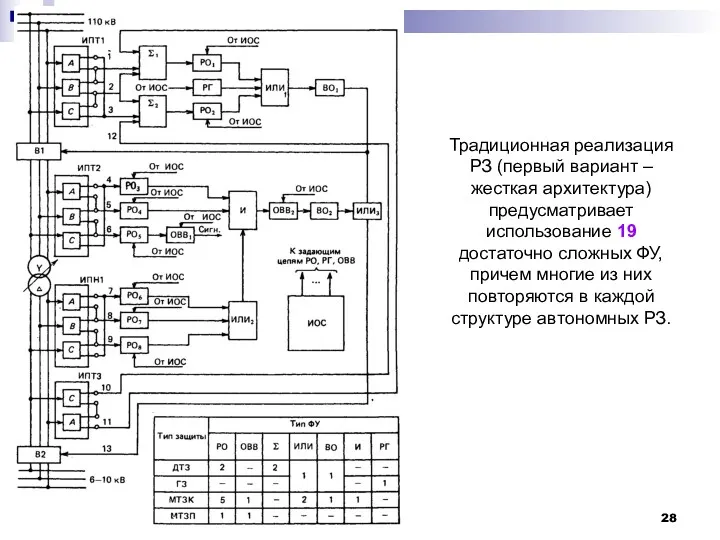
Традиционная реализация РЗ (первый вариант – жесткая архитектура) предусматривает использование 19
Традиционная реализация РЗ (первый вариант – жесткая архитектура) предусматривает использование 19
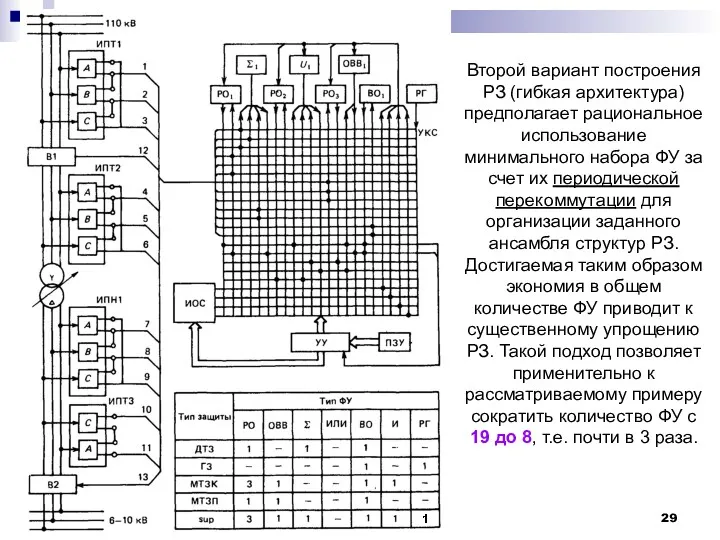
Второй вариант построения РЗ (гибкая архитектура) предполагает рациональное использование минимального набора
Второй вариант построения РЗ (гибкая архитектура) предполагает рациональное использование минимального набора
Устройство РЗ содержит измерительные преобразователи параметров защищаемого объекта ИПТ, ИПН, многоканальный
Устройство РЗ содержит измерительные преобразователи параметров защищаемого объекта ИПТ, ИПН, многоканальный
Получив из ПЗУ задание, УУ реализует коммутационный граф, настраивая ключи УКС.
Получив из ПЗУ задание, УУ реализует коммутационный граф, настраивая ключи УКС.
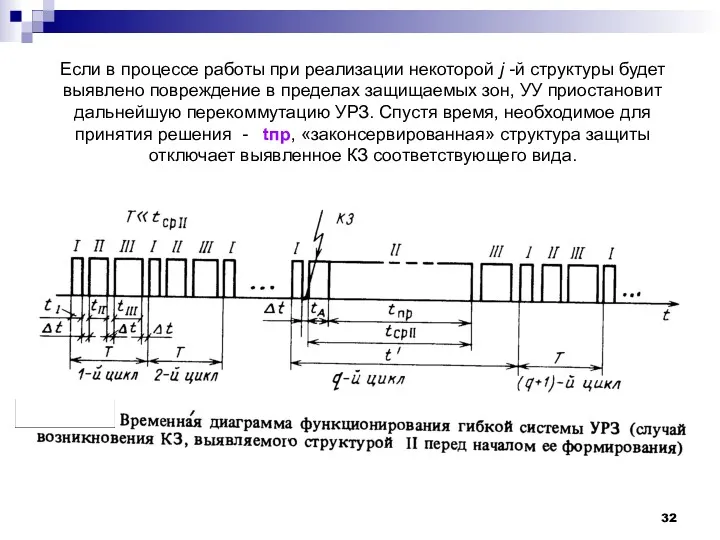
Если в процессе работы при реализации некоторой j -й структуры будет
Если в процессе работы при реализации некоторой j -й структуры будет
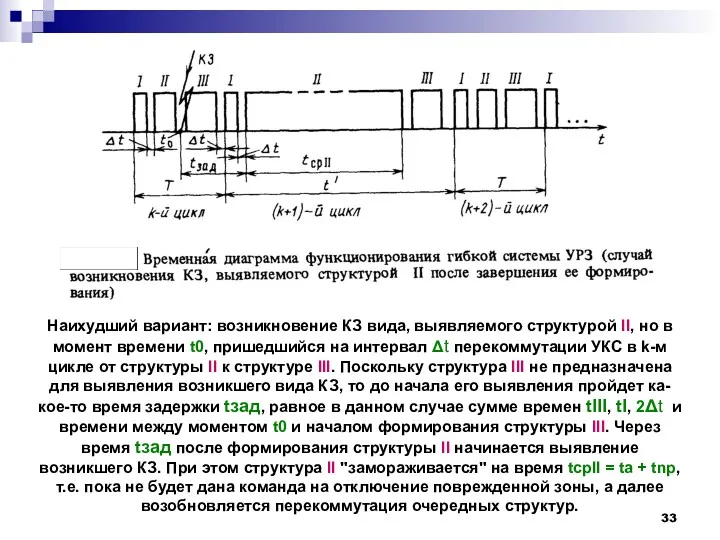
Наихудший вариант: возникновение КЗ вида, выявляемого структурой II, но в момент
Наихудший вариант: возникновение КЗ вида, выявляемого структурой II, но в момент
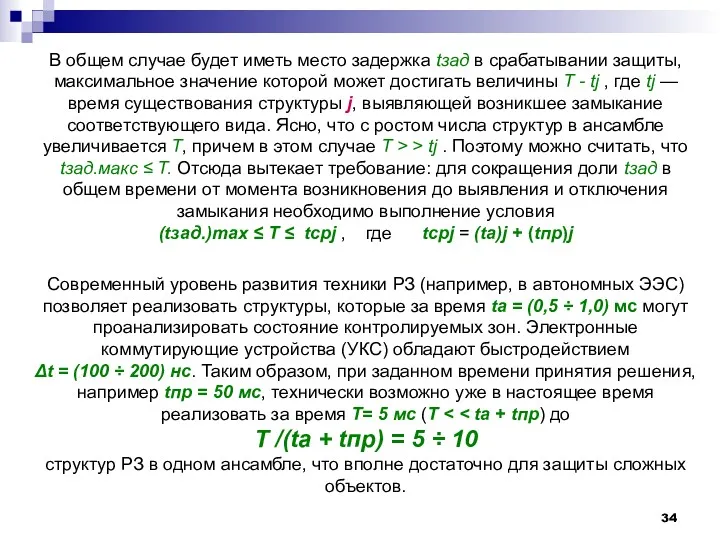
В общем случае будет иметь место задержка tзад в срабатывании защиты,
В общем случае будет иметь место задержка tзад в срабатывании защиты,
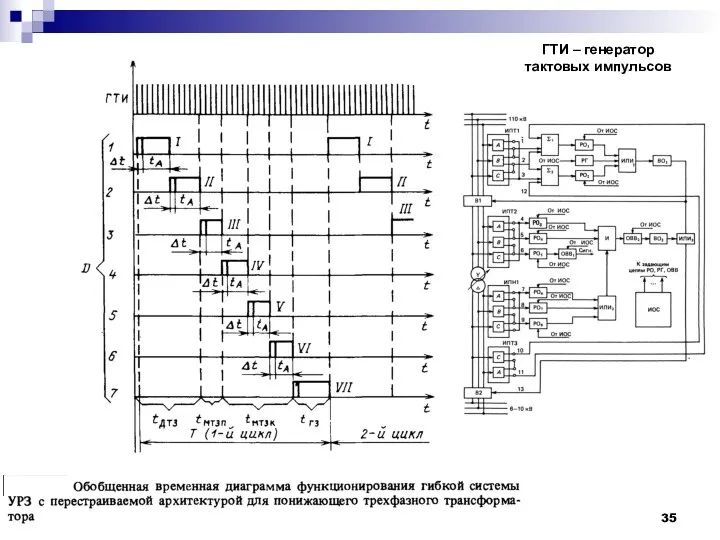
ГТИ – генератор тактовых импульсов
ГТИ – генератор тактовых импульсов
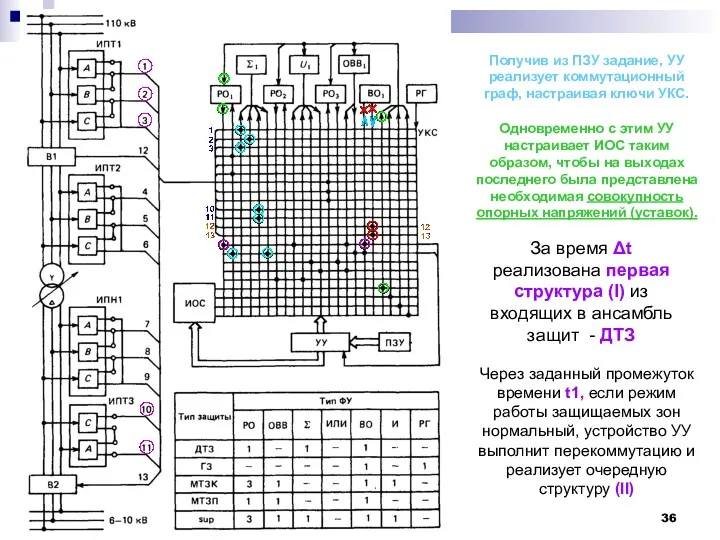
Получив из ПЗУ задание, УУ реализует коммутационный граф, настраивая ключи УКС.
Одновременно
Получив из ПЗУ задание, УУ реализует коммутационный граф, настраивая ключи УКС.
Одновременно
ПРОГНОЗИРУЮЩИЕ ГИБКИЕ РЗ НА БАЗЕ СПЕЦИАЛИЗИРОВАННЫХ МП
Известно, что операция прогнозирования
ПРОГНОЗИРУЮЩИЕ ГИБКИЕ РЗ НА БАЗЕ СПЕЦИАЛИЗИРОВАННЫХ МП
Известно, что операция прогнозирования
Прогнозирующие РЗ в начальный момент развития повреждения прогнозируют развитие аварийной ситуации
Прогнозирующие РЗ в начальный момент развития повреждения прогнозируют развитие аварийной ситуации
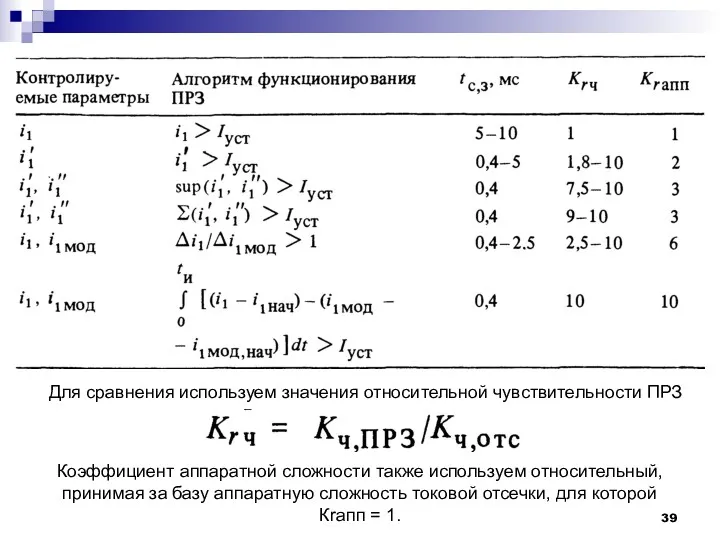
Для сравнения используем значения относительной чувствительности ПРЗ
Коэффициент аппаратной сложности также
Для сравнения используем значения относительной чувствительности ПРЗ
Коэффициент аппаратной сложности также
 Растения из Красной книги
Растения из Красной книги Игра Что? Где? Когда?
Игра Что? Где? Когда? Анатомия и физиология желудка. Лекция № 29
Анатомия и физиология желудка. Лекция № 29 Қол ұшы флегмонасы
Қол ұшы флегмонасы Производство ткани
Производство ткани Саша Черный. Образы детей в рассказах Кавказский пленник, Игорь-Робинзон
Саша Черный. Образы детей в рассказах Кавказский пленник, Игорь-Робинзон Динамика развития и структура мирового автомобилестроения
Динамика развития и структура мирового автомобилестроения Генераторы измерительных сигналов
Генераторы измерительных сигналов Сираҗетдин образы һәм акча мәсьәләсе
Сираҗетдин образы һәм акча мәсьәләсе Классный час Это праздник со слезами на глазах
Классный час Это праздник со слезами на глазах Викторина Азбука вежливости
Викторина Азбука вежливости Многонациональный Крым
Многонациональный Крым Разделка теста
Разделка теста Передача информации. Локальные и глобальные компьютерные сети
Передача информации. Локальные и глобальные компьютерные сети Теория обучения. Процесс обучения как часть целостного педагогического процесса
Теория обучения. Процесс обучения как часть целостного педагогического процесса Трудные книги Альберта Лиханова
Трудные книги Альберта Лиханова урок Карбоновые кислоты
урок Карбоновые кислоты Синтез линейных стационарных автоматических систем
Синтез линейных стационарных автоматических систем Классный час, для учеников 4-го класса
Классный час, для учеников 4-го класса Биологиялық ұлпалардың дыбыспен әрекеттесуінің физикалық негізі. Медицинада ультрадыбыстық зерттеулерді қолдану
Биологиялық ұлпалардың дыбыспен әрекеттесуінің физикалық негізі. Медицинада ультрадыбыстық зерттеулерді қолдану Поделка: Ёлочка из бумажной бахромы. 2 класс. УМК Планета знаний.
Поделка: Ёлочка из бумажной бахромы. 2 класс. УМК Планета знаний. урок №1 по модулю Основы православной культуры Россия - наша Родина
урок №1 по модулю Основы православной культуры Россия - наша Родина Глобальные проблемы современности
Глобальные проблемы современности Мой дом будущего
Мой дом будущего Оборудование для мойки тары
Оборудование для мойки тары Тепловой поверочный расчет парогазовой установки ПГУ-325
Тепловой поверочный расчет парогазовой установки ПГУ-325 Сайт одноклассники
Сайт одноклассники ГРИС Стрелочка
ГРИС Стрелочка