- Микропроцессоры. Структурная схема микропроцессорной системы

Содержание
- 2. Микропроцессор — это центральный блок персонального компьютера или вычислительной системы, предназначенный для выполнения арифметических и логических
- 3. Во втором случае под архитектурой понимается архитектура набора команд, исполняемых микропроцессором. Здесь различают две основных архитектуры:
- 4. В качестве недостатка архитектуры фон Неймана можно назвать возможность непреднамеренного нарушения работоспособности системы (программные ошибки) и
- 5. В Гарвардской архитектуре принципиально различаются два вида памяти микропроцессора: - память программ (для хранения инструкций микропроцессора);
- 6. В системах с RISK-архитектурой длина всех команд одинакова и они все выполняются за одинаковое число тактов
- 7. - универсальные микропроцессоры; - микроконтроллеры; - цифровые сигнальные процессоры (DSP) Универсальные микропроцессоры имеют широкий набор команд,
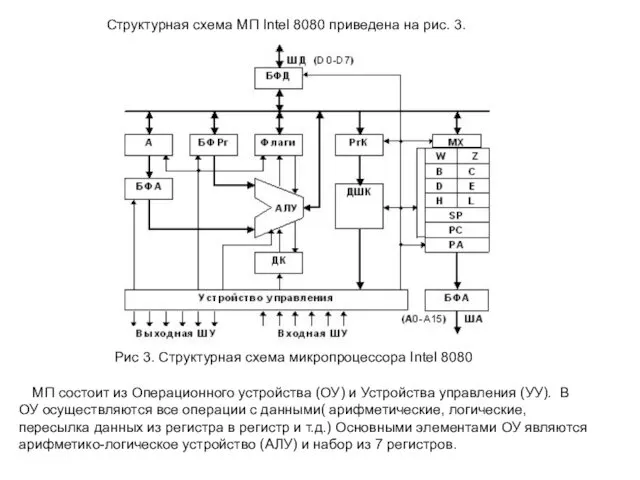
- 8. Структурная схема МП Intel 8080 приведена на рис. 3. МП состоит из Операционного устройства (ОУ) и
- 9. Регистр А имеет особое значение – в нем сохраняются (аккумулируются) большинство арифметических и логических операций. Также
- 10. После выполнения подпрограммы прерывания МП извлекает из стека адрес команды, на которой он остановился и как
- 11. Однокристальные микроконтроллеры или просто микроконтроллеры (МК) предназначены для использования в системах промышленной и бытовой автоматики. Они
- 12. PIC микроконтроллеры – это уже микроконтроллеры с Гарвардской архитектурой и RISK системой команд, несколько более удобные
- 13. ATmega – семейство AVR микроконтроллеров предназначенных для использования в самых разнообразных областях, благодаря очень большому набору
- 14. - 128 байт EEPROM; - 128 байт SRAM (ОЗУ); - 18 линий ввода-вывода (I/O); - 32
- 15. Описание выводов. GND - земля (-) Port B, Port D являются двунаправленнымы портами ввода/вывода с внутренними
- 16. Рис. 8. Программная модель AVR-микроконтроллеров Регистровый файл, блок регистров ввода/вывода и оперативная память, как показано на
- 17. Рис. 10. Регистровый файл или РОН. Рис. 9. Память данных Команды 16-разрядного сложения с константой ADIW
- 18. Кроме оперативной памяти программно доступными ресурсами микроконтроллера являются энергонезависимые, электрически программируемые FLASH и EEPROM блоки памяти,
- 19. Признаки результата операции - флаги Во время выполнения арифметических и логических операций или операций работы с
- 20. Бит 2 – N Флаг отрицательного результата. Устанавливается, если MSB (Most Significant Bit - старший бит)
- 21. Прерывания. Если произошел запрос прерывания, и флаг I в регистре состояния установлен в 1, то адрес
- 22. Программирование AVR микроконтроллера Для программирования микроконтроллеров AVR и отладки программ разработаны интегрированные среды разработки программ, повышающие
- 23. Порты ввода/вывода В МК AT90S2313 имеются три двунаправленных параллельных портов ввода/вывода: порт В и портD. Для
- 24. Схема включения-выключения светодиода в Proteus Рис.12. Включение светодиода тумблером Здесь резистор R2 поставили для того, чтобы
- 25. Включение и выключение светодиода тумблером через ввод-вывод В программе будем считывать данные с ножки PD2 и
- 26. Использование подтягивающего резистора Рис.13. Включение светодиода тумблером с подтягивающим резистором
- 27. Программа 2 Использование подтягивающих резисторов (убрали резистор с вывода D2) .nolist ; чтобы не выводил в
- 28. Рис.14. Загрузка hex – файла в микропроцессор
- 29. Создание и компиляция программы в AVR-Studio В меню нужно открыть Project – New Project. Рис.15. Окно
- 30. Выбираем язык программирования Atmel AVR Assembler и задаем имя проекту и имя файлу с программой на
- 31. Рис.17. Выбираем микропроцессор
- 32. Рис. 18. Запись в AVR Studio программы .asm и ассемблирование - получение hex -файла
- 33. Рис.19. Компиляция программы и ее пошаговое выполнение
- 34. Панель инструментов AVR Studio - Assemble (F7) ассемблирование программы - Assemble and run (Ctrl+F7) ассемблирование программы
- 35. Моделирование устройств в программе Proteus Запускаем “PROTEUS”. На рис.21. показано окно программы. Слева - панель Device,
- 36. Чтобы выбрать нужный элемент нужно нажать кнопку “P”. При нажатии на кнопку “P”открывается окно Pick Device.
- 37. Можно начать поиск устройства с помощью строки “Keyword”, которая находится также в окне Pick Device,написав например,
- 38. Выбираем резисторы . Для этого в окне Pick Device выбираем категорию “Resistors” или в строке “Keyword”
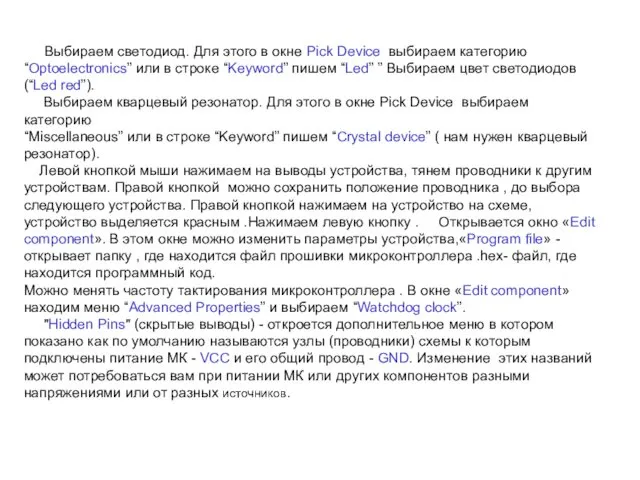
- 39. Выбираем светодиод. Для этого в окне Pick Device выбираем категорию “Optoelectronics” или в строке “Keyword” пишем
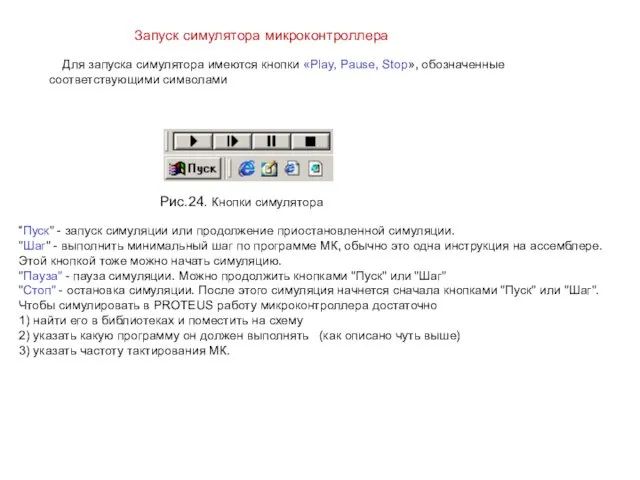
- 40. Запуск симулятора микроконтроллера Рис.24. Кнопки симулятора Для запуска симулятора имеются кнопки «Play, Pause, Stop», обозначенные соответствующими
- 41. Чтобы смоделировать схему нужно запрограммировать микроконтроллер. Микроконтроллер программируется на языках Си или Ассемблере. Программа для микроконтроллера
- 42. Рис.25. Загрузка hex – файла в микропроцессор
- 44. Скачать презентацию
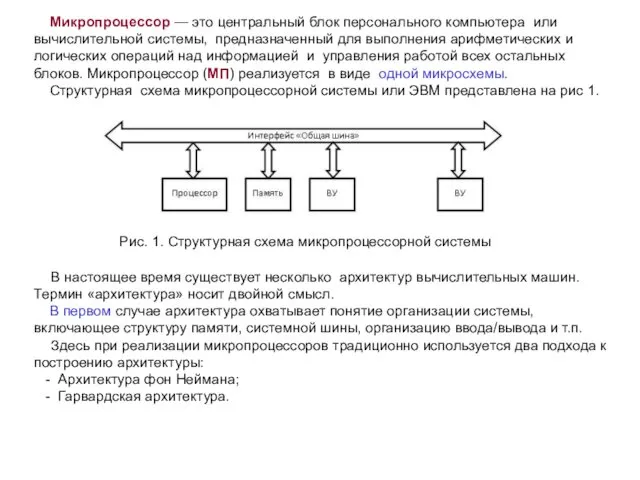
Микропроцессор — это центральный блок персонального компьютера или вычислительной системы,
Микропроцессор — это центральный блок персонального компьютера или вычислительной системы,
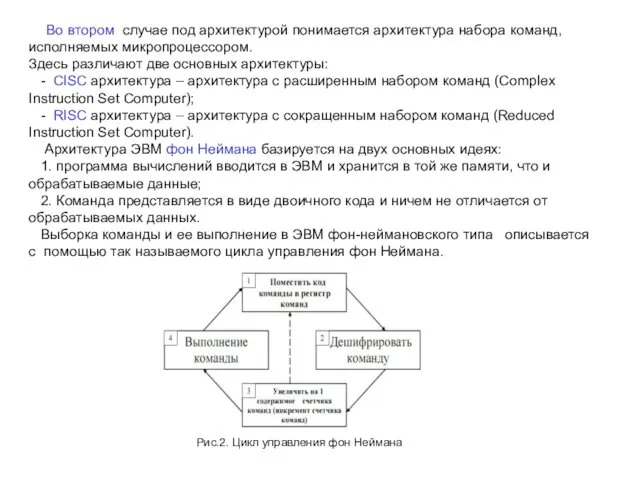
Во втором случае под архитектурой понимается архитектура набора команд, исполняемых
Во втором случае под архитектурой понимается архитектура набора команд, исполняемых
В качестве недостатка архитектуры фон Неймана можно назвать возможность непреднамеренного
В качестве недостатка архитектуры фон Неймана можно назвать возможность непреднамеренного
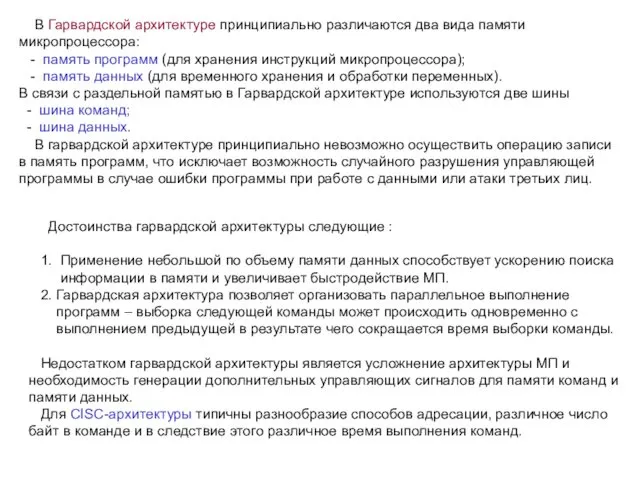
В Гарвардской архитектуре принципиально различаются два вида памяти микропроцессора:
В Гарвардской архитектуре принципиально различаются два вида памяти микропроцессора:
В системах с RISK-архитектурой длина всех команд одинакова и они
В системах с RISK-архитектурой длина всех команд одинакова и они
- универсальные микропроцессоры;
- микроконтроллеры;
- цифровые сигнальные процессоры (DSP)
- универсальные микропроцессоры;
- микроконтроллеры;
- цифровые сигнальные процессоры (DSP)
Структурная схема МП Intel 8080 приведена на рис. 3.
МП
Структурная схема МП Intel 8080 приведена на рис. 3.
МП
Регистр А имеет особое значение – в нем сохраняются (аккумулируются)
Регистр А имеет особое значение – в нем сохраняются (аккумулируются)
После выполнения подпрограммы прерывания МП извлекает из стека адрес команды,
После выполнения подпрограммы прерывания МП извлекает из стека адрес команды,
Однокристальные микроконтроллеры или просто микроконтроллеры (МК) предназначены для использования в
Однокристальные микроконтроллеры или просто микроконтроллеры (МК) предназначены для использования в
PIC микроконтроллеры – это уже микроконтроллеры с Гарвардской архитектурой и
PIC микроконтроллеры – это уже микроконтроллеры с Гарвардской архитектурой и

ATmega – семейство AVR микроконтроллеров предназначенных для использования в самых
ATmega – семейство AVR микроконтроллеров предназначенных для использования в самых
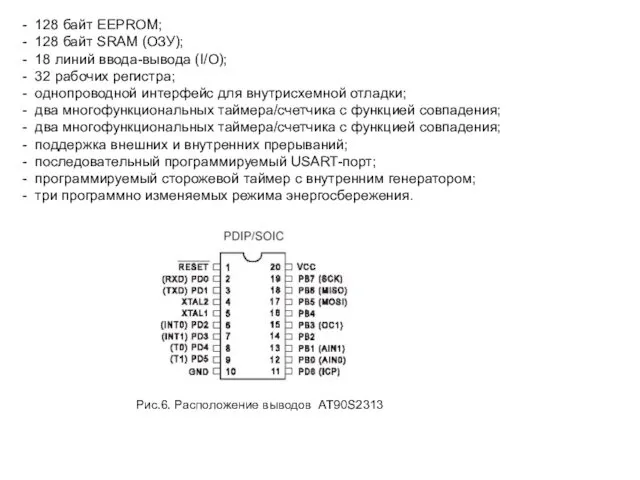
- 128 байт EEPROM;
- 128 байт SRAM (ОЗУ);
-
- 128 байт EEPROM;
- 128 байт SRAM (ОЗУ);
-
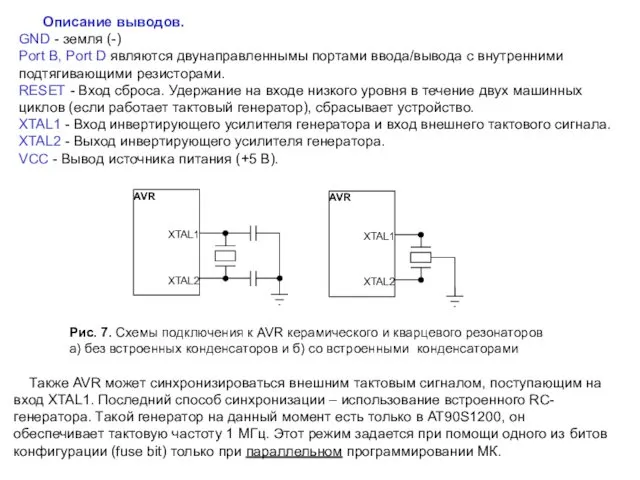
Описание выводов.
GND - земля (-)
Port B, Port D являются двунаправленнымы
Описание выводов.
GND - земля (-)
Port B, Port D являются двунаправленнымы
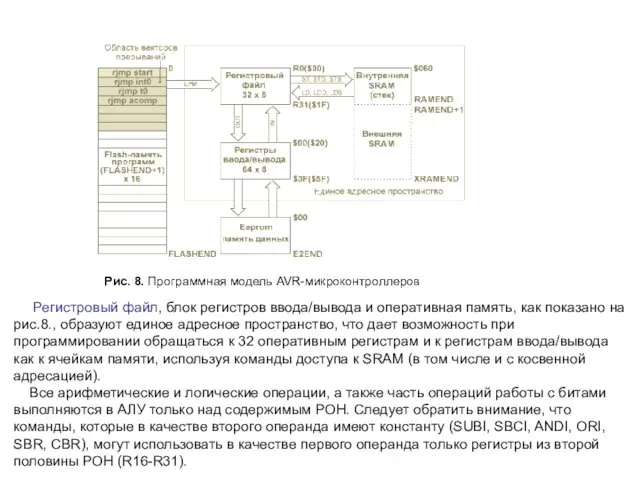
Рис. 8. Программная модель AVR-микроконтроллеров
Регистровый файл, блок регистров ввода/вывода
Рис. 8. Программная модель AVR-микроконтроллеров
Регистровый файл, блок регистров ввода/вывода
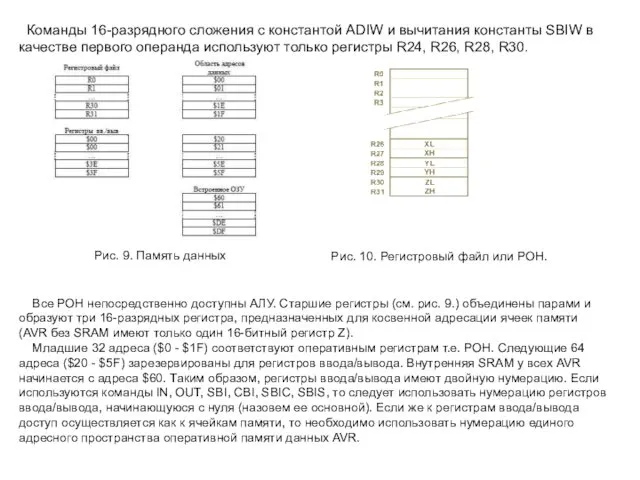
Рис. 10. Регистровый файл или РОН.
Рис. 9. Память данных
Команды
Рис. 10. Регистровый файл или РОН.
Рис. 9. Память данных
Команды
Кроме оперативной памяти программно доступными ресурсами микроконтроллера являются энергонезависимые, электрически
Кроме оперативной памяти программно доступными ресурсами микроконтроллера являются энергонезависимые, электрически
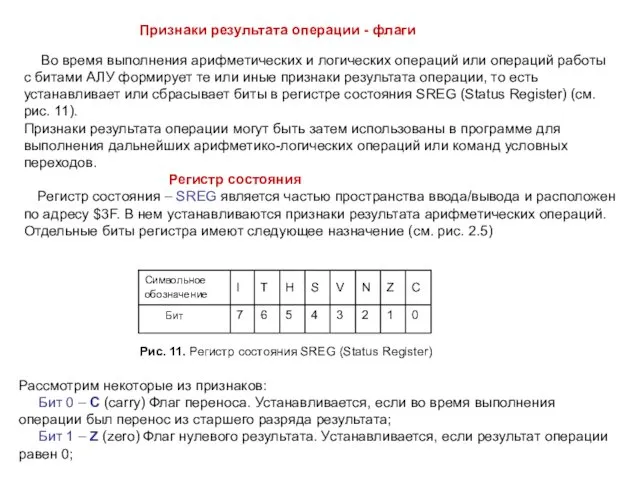
Признаки результата операции - флаги
Во время выполнения арифметических и логических
Признаки результата операции - флаги
Во время выполнения арифметических и логических
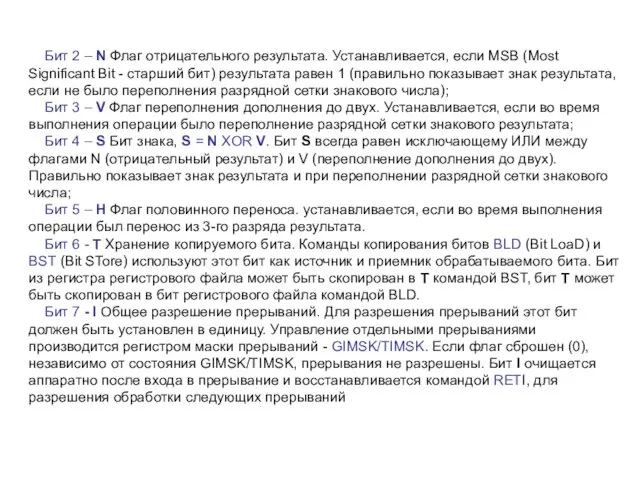
Бит 2 – N Флаг отрицательного результата. Устанавливается, если MSB
Бит 2 – N Флаг отрицательного результата. Устанавливается, если MSB
Прерывания.
Если произошел запрос прерывания, и флаг I в регистре
Прерывания.
Если произошел запрос прерывания, и флаг I в регистре
Программирование AVR микроконтроллера
Для программирования микроконтроллеров AVR и отладки программ разработаны
Программирование AVR микроконтроллера
Для программирования микроконтроллеров AVR и отладки программ разработаны
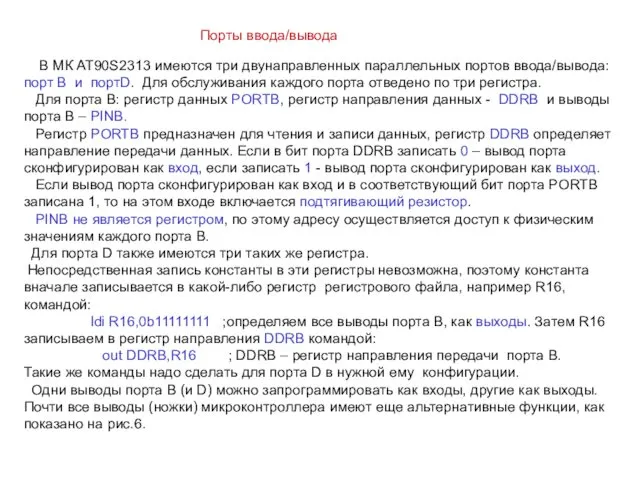
Порты ввода/вывода
В МК AT90S2313 имеются три двунаправленных параллельных портов ввода/вывода:
Порты ввода/вывода
В МК AT90S2313 имеются три двунаправленных параллельных портов ввода/вывода:
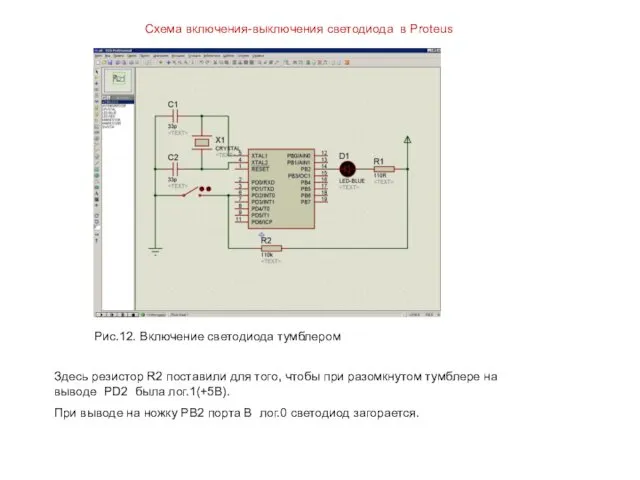
Схема включения-выключения светодиода в Proteus
Рис.12. Включение светодиода тумблером
Здесь резистор R2 поставили
Схема включения-выключения светодиода в Proteus
Рис.12. Включение светодиода тумблером
Здесь резистор R2 поставили
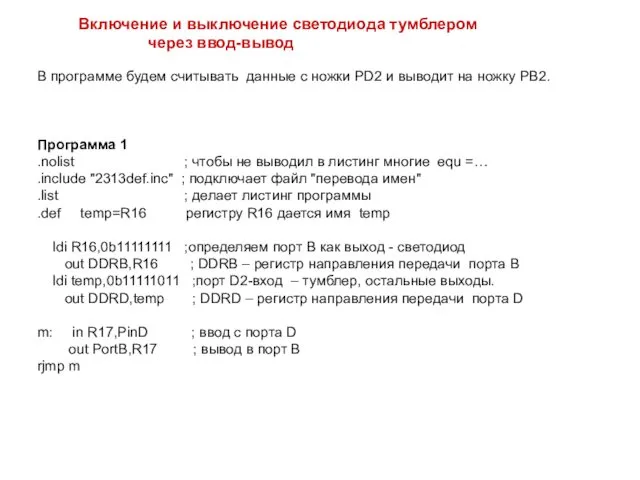
Включение и выключение светодиода тумблером
через ввод-вывод
В программе будем считывать
Включение и выключение светодиода тумблером
через ввод-вывод
В программе будем считывать
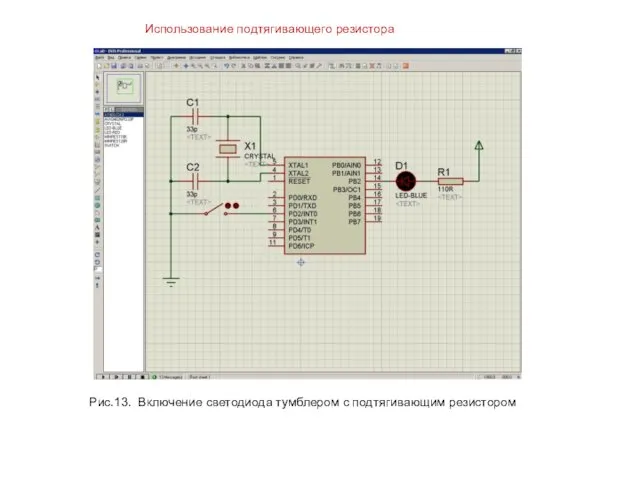
Использование подтягивающего резистора
Рис.13. Включение светодиода тумблером с подтягивающим резистором
Использование подтягивающего резистора
Рис.13. Включение светодиода тумблером с подтягивающим резистором
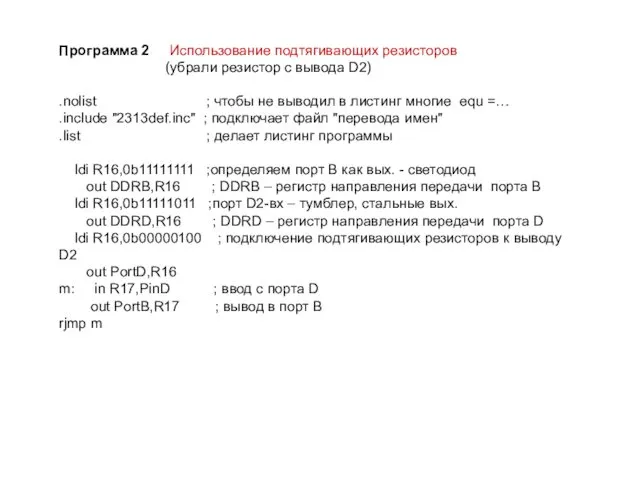
Программа 2 Использование подтягивающих резисторов
(убрали резистор с вывода D2)
.nolist ;
Программа 2 Использование подтягивающих резисторов
(убрали резистор с вывода D2)
.nolist ;
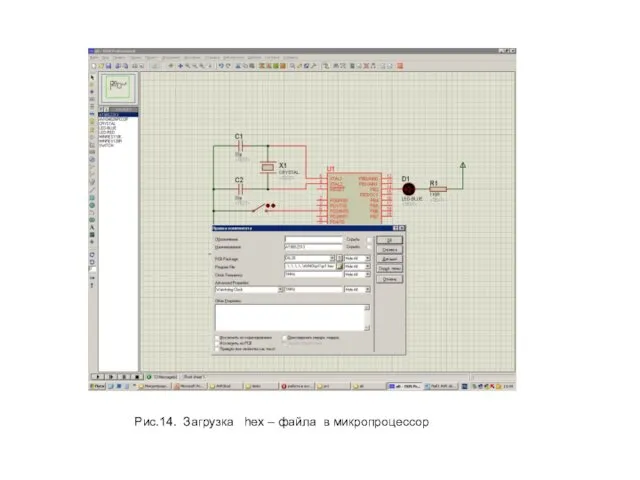
Рис.14. Загрузка hex – файла в микропроцессор
Рис.14. Загрузка hex – файла в микропроцессор
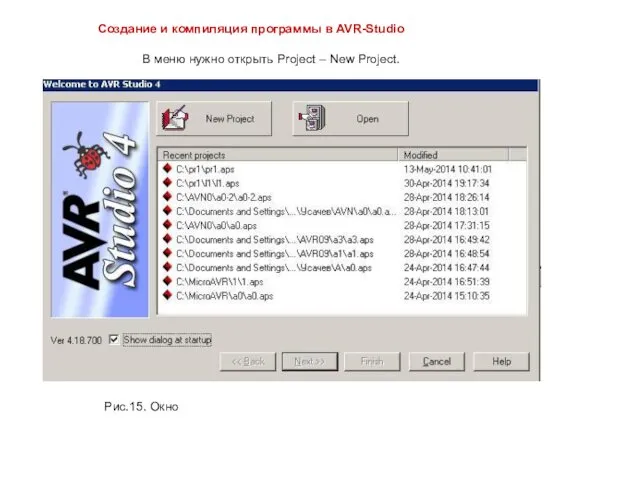
Создание и компиляция программы в AVR-Studio
В меню нужно
Создание и компиляция программы в AVR-Studio
В меню нужно
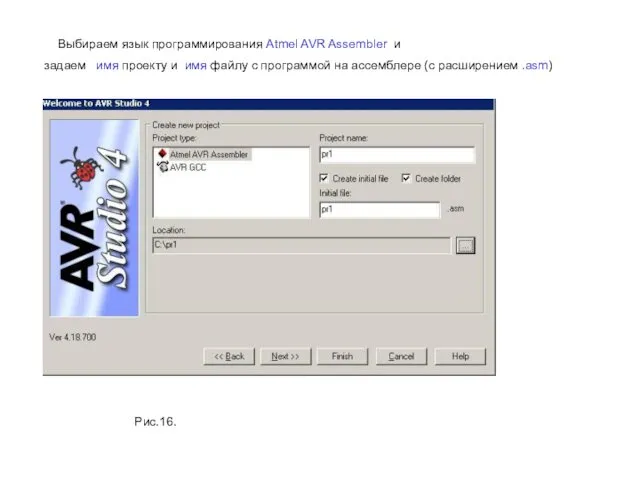
Выбираем язык программирования Atmel AVR Assembler и
задаем имя проекту
Выбираем язык программирования Atmel AVR Assembler и
задаем имя проекту
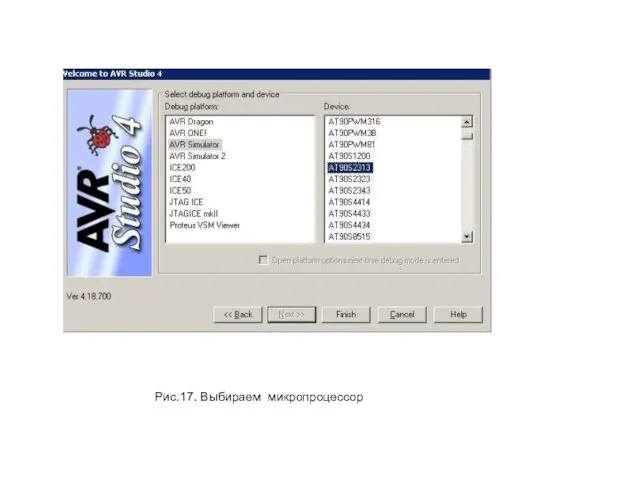
Рис.17. Выбираем микропроцессор
Рис.17. Выбираем микропроцессор
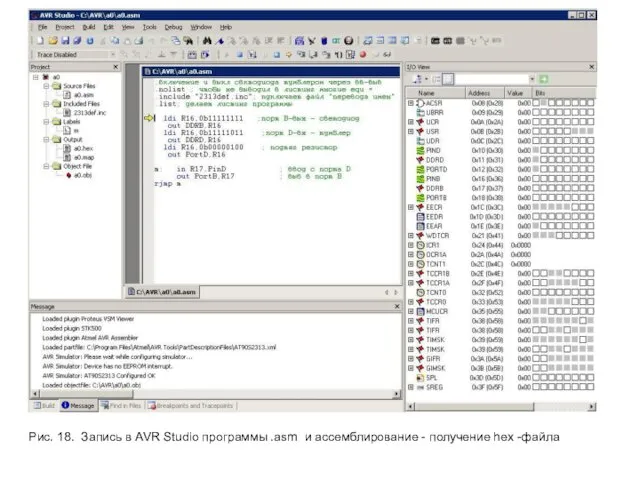
Рис. 18. Запись в AVR Studio программы .asm и ассемблирование -
Рис. 18. Запись в AVR Studio программы .asm и ассемблирование -
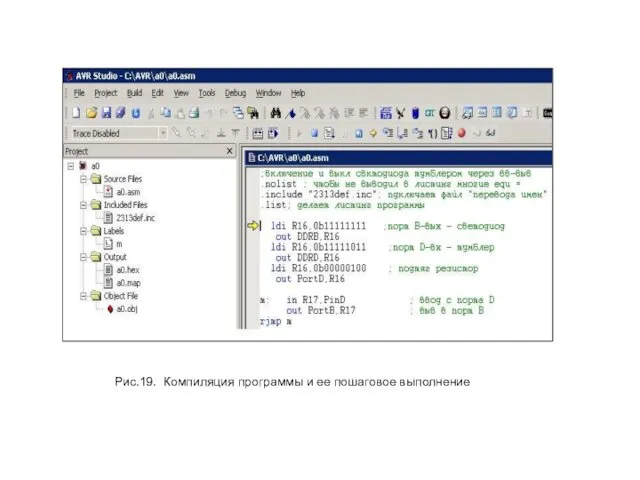
Рис.19. Компиляция программы и ее пошаговое выполнение
Рис.19. Компиляция программы и ее пошаговое выполнение
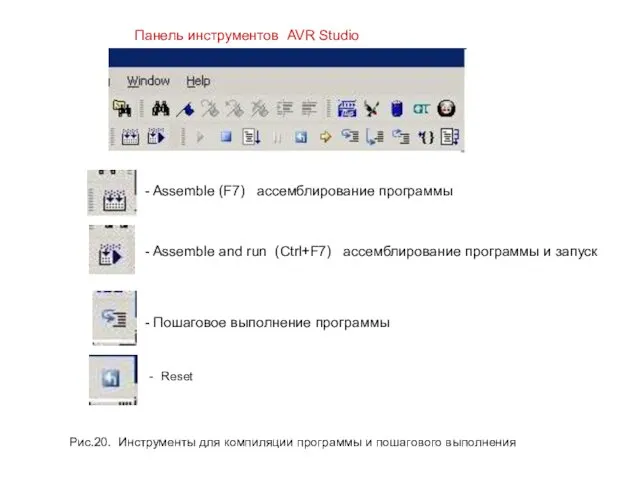
Панель инструментов AVR Studio
- Assemble (F7) ассемблирование программы
- Assemble and run
Панель инструментов AVR Studio
- Assemble (F7) ассемблирование программы
- Assemble and run
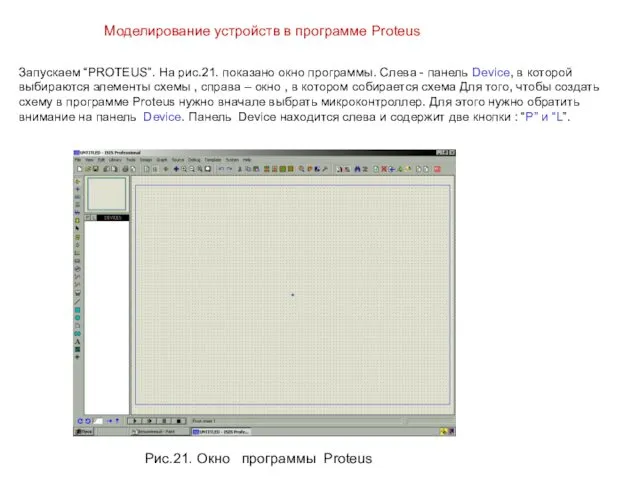
Моделирование устройств в программе Proteus
Запускаем “PROTEUS”. На рис.21. показано окно
Моделирование устройств в программе Proteus
Запускаем “PROTEUS”. На рис.21. показано окно
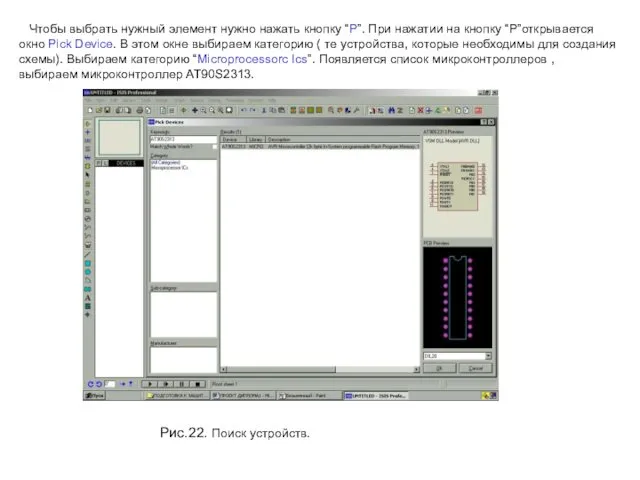
Чтобы выбрать нужный элемент нужно нажать кнопку “P”. При нажатии
Чтобы выбрать нужный элемент нужно нажать кнопку “P”. При нажатии
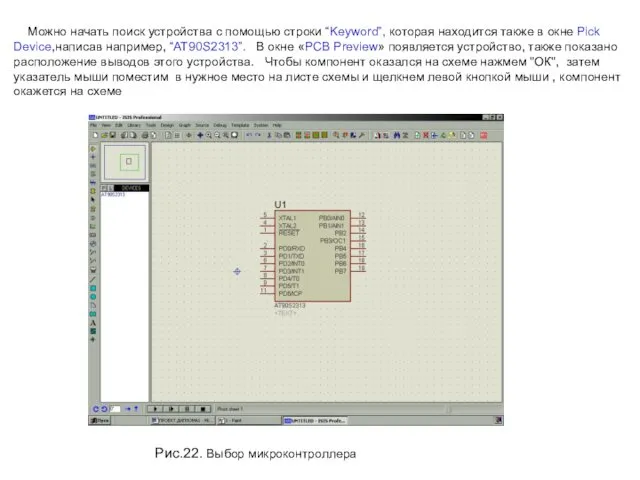
Можно начать поиск устройства с помощью строки “Keyword”, которая находится
Можно начать поиск устройства с помощью строки “Keyword”, которая находится
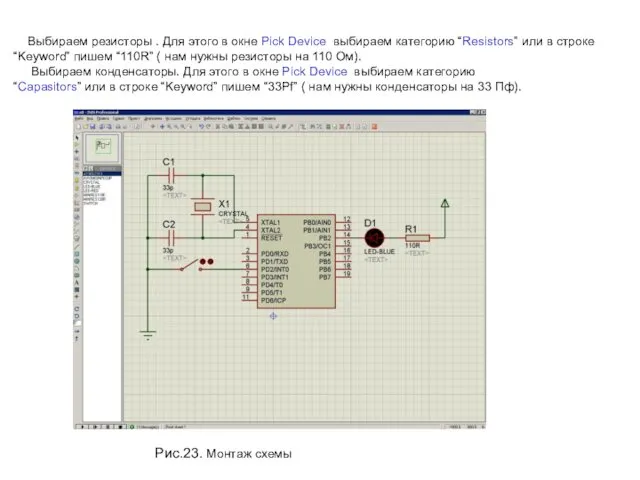
Выбираем резисторы . Для этого в окне Pick Device выбираем
Выбираем резисторы . Для этого в окне Pick Device выбираем
Выбираем светодиод. Для этого в окне Pick Device выбираем категорию
“Optoelectronics”
Выбираем светодиод. Для этого в окне Pick Device выбираем категорию
“Optoelectronics”
Запуск симулятора микроконтроллера
Рис.24. Кнопки симулятора
Для запуска симулятора имеются
Запуск симулятора микроконтроллера
Рис.24. Кнопки симулятора
Для запуска симулятора имеются
Чтобы смоделировать схему нужно запрограммировать микроконтроллер.
Микроконтроллер программируется на языках
Чтобы смоделировать схему нужно запрограммировать микроконтроллер.
Микроконтроллер программируется на языках
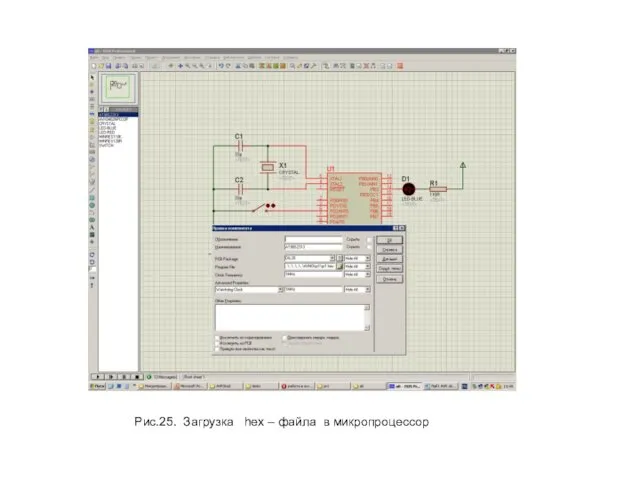
Рис.25. Загрузка hex – файла в микропроцессор
Рис.25. Загрузка hex – файла в микропроцессор
 Разработка проекта реконструкции электрической сети 110 кВ ПС 110/35/6 кВ Хатын-Юрях
Разработка проекта реконструкции электрической сети 110 кВ ПС 110/35/6 кВ Хатын-Юрях Химиядағы жылдамдық түсінігі. Химиялық реакция жылдамдығына әсер ететін факторлар
Химиядағы жылдамдық түсінігі. Химиялық реакция жылдамдығына әсер ететін факторлар Урок по теме Добро и зло
Урок по теме Добро и зло Наладка станков с ЧПУ
Наладка станков с ЧПУ Работа с родителями
Работа с родителями Федеральные и региональные органы исполнительной власти
Федеральные и региональные органы исполнительной власти Увеличительные приборы, используемые при изучении строения клетки
Увеличительные приборы, используемые при изучении строения клетки Издержки фирмы
Издержки фирмы Образование единого русского государства
Образование единого русского государства развлечение Полет в космос
развлечение Полет в космос Текстильные материалы и их свойства
Текстильные материалы и их свойства Исмаил Гаспринский
Исмаил Гаспринский Монтаж электрической цепи
Монтаж электрической цепи Уроки вежливости.
Уроки вежливости. В этот день закончилась война
В этот день закончилась война Сказка. Гуси-лебеди Владимир Тимошкин
Сказка. Гуси-лебеди Владимир Тимошкин Занятие по внеурочной деятельности
Занятие по внеурочной деятельности Виды параллелограммов
Виды параллелограммов Рахіт і рахітоподібні захворювання у дітей
Рахіт і рахітоподібні захворювання у дітей Химические реакции
Химические реакции bet_game
bet_game Презентация для уроков ОБЖ в 1-4 классах на туму Советы пешеходам Диск
Презентация для уроков ОБЖ в 1-4 классах на туму Советы пешеходам Диск Проведение собрания учителей субботней школы
Проведение собрания учителей субботней школы С юбилеем, любимая мамочка
С юбилеем, любимая мамочка Устройства ввода и вывода звука
Устройства ввода и вывода звука ЛФК при неврологической патологии
ЛФК при неврологической патологии Аңыз әңгімелер
Аңыз әңгімелер Дроссели и трансформаторы источников питания
Дроссели и трансформаторы источников питания