- Микросхема ESP8266

Содержание
- 2. Особенности платы ESP8266 Удобное подключение к компьютеру – через USB кабель, питание от него же; Наличие
- 5. Распиновка esp8266 Существует огромное количество разновидностей модуля ESP8266. На рисунке представлены некоторые из них. Наиболее популярным
- 6. Распиновка для ESP01 изображена на картинке. Описание контактов: 1 – земля, 8 – питание. По документации
- 7. Распиновка ESP-12
- 8. Распиновка Wemos Mini
- 9. Особенности пинов
- 10. Основные отличия Ардуино от ESP8266 ESP8266 имеет больший объем флеш-памяти, при этом у ESP8266 отсутствует энергонезависимая
- 11. Отличия от AVR Arduino Деление на 0 min() и max() map() В отличие от AVR, деление
- 12. Типы данных Тип int является синонимом long (int32_t) и занимает 4 байта. В AVR int это
- 13. Функция analogWrite() Работает на всех пинах, кроме GPIO16. Разрядность ШИМ по умолчанию 8 бит (0.. 255)
- 14. Функция yield() В реализации esp8266 функция yield() выполняет другую задачу и использовать её как на AVR
- 15. Serial (UART) В отличие от реализации для AVR, можно изменить размер буфера на приём: Serial.setRxBufferSize(размер) в
- 16. В настоящий момент для ESP8266 можно реализовать следующие функции: Основные функции языка Wiring. Управлять портами GPIO
- 17. Использование esp8266 для связи Ардуино по WiFi Перед подключением к Ардуино важно помнить, что у ESP8266
- 18. Схема подключения ESP8266 к Arduino Nano
- 19. Работа с библиотекой Wi-Fi для ESP8266 схожа с библиотекой для обыкновенного шилда. Имеется несколько особенностей: mode(m)
- 20. NodeMCU на базе esp8266 NodeMCU – это платформа, основанная на базе модуля esp8266. Используется для управления
- 21. WeMos на базе esp8266 WeMos – еще один вид платформы, основанный на базе микроконтроллера esp8266. Соответственно,
- 23. Скачать презентацию
Особенности платы ESP8266
Удобное подключение к компьютеру – через USB кабель, питание
Особенности платы ESP8266
Удобное подключение к компьютеру – через USB кабель, питание

Распиновка esp8266
Существует огромное количество разновидностей модуля ESP8266. На рисунке представлены некоторые
Распиновка esp8266
Существует огромное количество разновидностей модуля ESP8266. На рисунке представлены некоторые
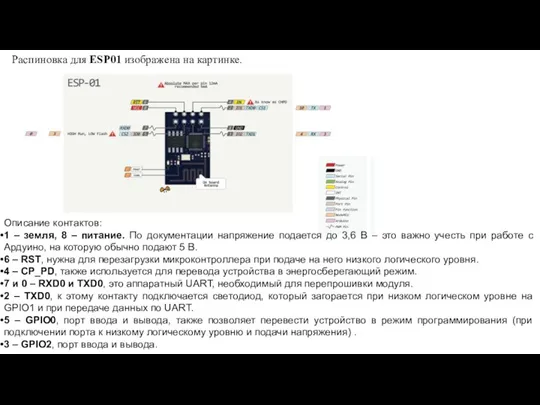
Распиновка для ESP01 изображена на картинке.
Описание контактов:
1 – земля, 8 –
Распиновка для ESP01 изображена на картинке.
Описание контактов:
1 – земля, 8 –
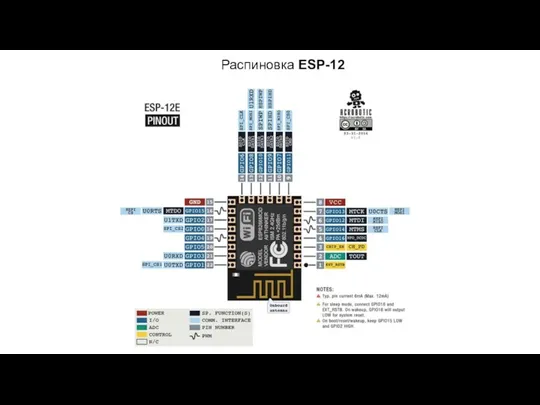
Распиновка ESP-12
Распиновка ESP-12
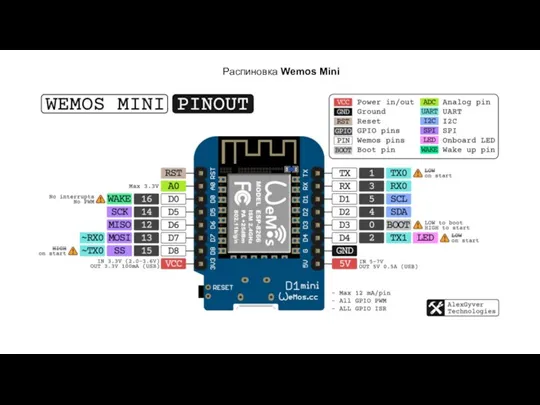
Распиновка Wemos Mini
Распиновка Wemos Mini
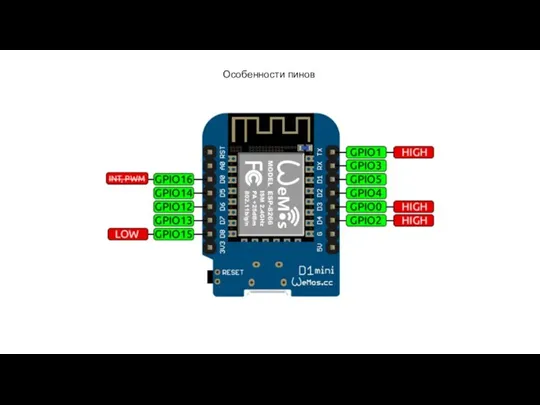
Особенности пинов
Особенности пинов
Основные отличия Ардуино от ESP8266
ESP8266 имеет больший объем флеш-памяти, при этом
Основные отличия Ардуино от ESP8266
ESP8266 имеет больший объем флеш-памяти, при этом
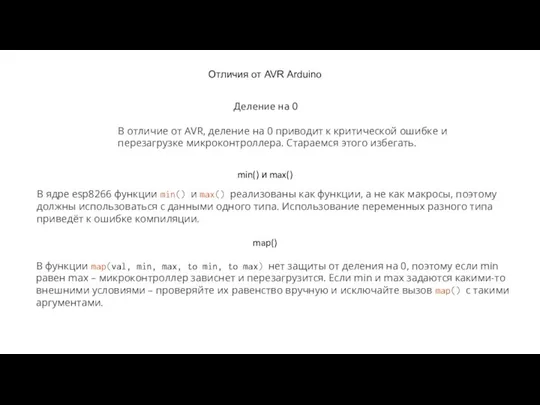
Отличия от AVR Arduino
Деление на 0
min() и max()
map()
В отличие от AVR,
Отличия от AVR Arduino
Деление на 0
min() и max()
map()
В отличие от AVR,

Типы данных
Тип int является синонимом long (int32_t) и занимает 4 байта. В AVR int это int16_t, то есть
Типы данных
Тип int является синонимом long (int32_t) и занимает 4 байта. В AVR int это int16_t, то есть
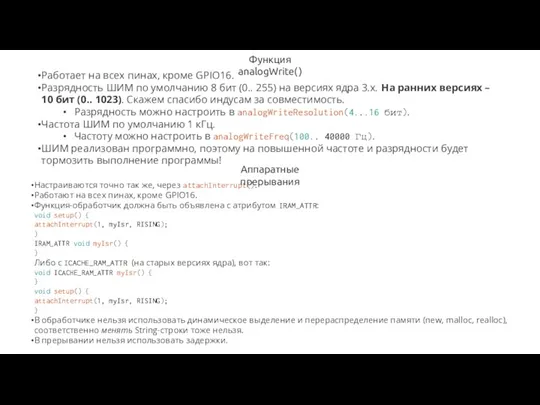
Функция analogWrite()
Работает на всех пинах, кроме GPIO16.
Разрядность ШИМ по умолчанию 8
Функция analogWrite()
Работает на всех пинах, кроме GPIO16.
Разрядность ШИМ по умолчанию 8
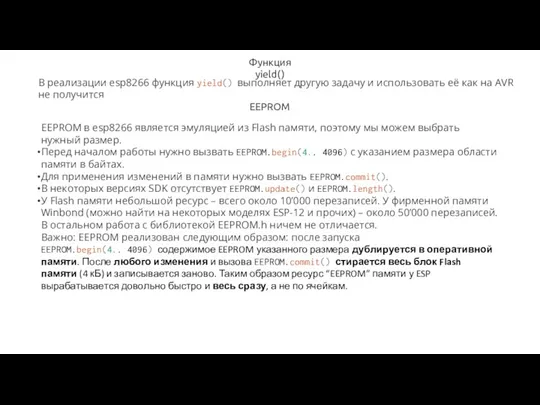
Функция yield()
В реализации esp8266 функция yield() выполняет другую задачу и использовать её
Функция yield()
В реализации esp8266 функция yield() выполняет другую задачу и использовать её
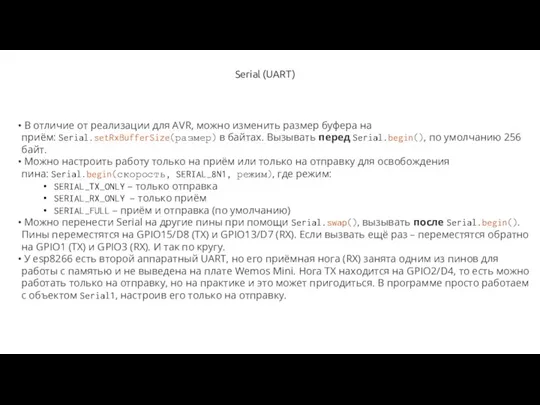
Serial (UART)
В отличие от реализации для AVR, можно изменить размер
Serial (UART)
В отличие от реализации для AVR, можно изменить размер

В настоящий момент для ESP8266 можно реализовать следующие функции:
Основные функции языка
В настоящий момент для ESP8266 можно реализовать следующие функции:
Основные функции языка
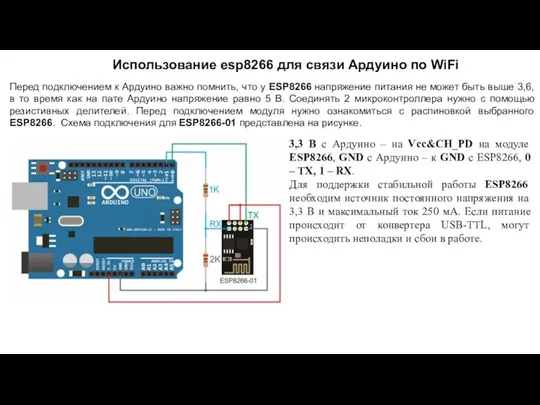
Использование esp8266 для связи Ардуино по WiFi
Перед подключением к Ардуино важно
Использование esp8266 для связи Ардуино по WiFi
Перед подключением к Ардуино важно
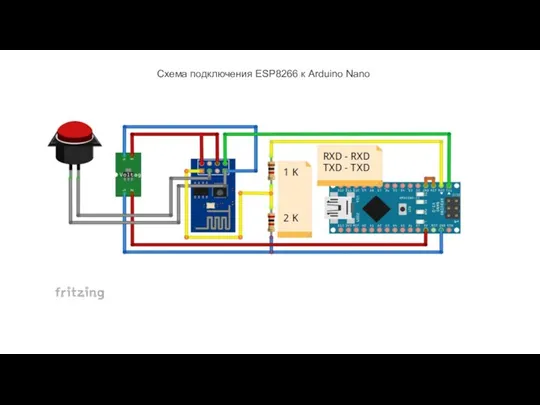
Схема подключения ESP8266 к Arduino Nano
Схема подключения ESP8266 к Arduino Nano
Работа с библиотекой Wi-Fi для ESP8266 схожа с библиотекой для обыкновенного
Работа с библиотекой Wi-Fi для ESP8266 схожа с библиотекой для обыкновенного
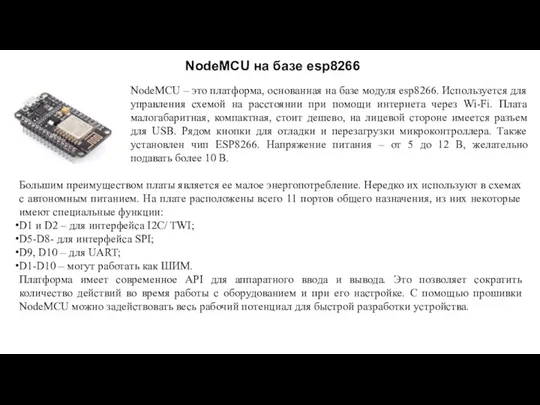
NodeMCU на базе esp8266
NodeMCU – это платформа, основанная на базе модуля
NodeMCU на базе esp8266
NodeMCU – это платформа, основанная на базе модуля

WeMos на базе esp8266
WeMos – еще один вид платформы, основанный на
WeMos на базе esp8266
WeMos – еще один вид платформы, основанный на
 Открытка к Дню защитника Отечества
Открытка к Дню защитника Отечества Свойства параллельных плоскостей
Свойства параллельных плоскостей Танцы народов Кавказа
Танцы народов Кавказа Разложение многочленов на множители
Разложение многочленов на множители презентация Фронтовая тетрадь- песенник Трифонова С.И.
презентация Фронтовая тетрадь- песенник Трифонова С.И. Развитие чувства времени у детей старшего дошкольного возраста
Развитие чувства времени у детей старшего дошкольного возраста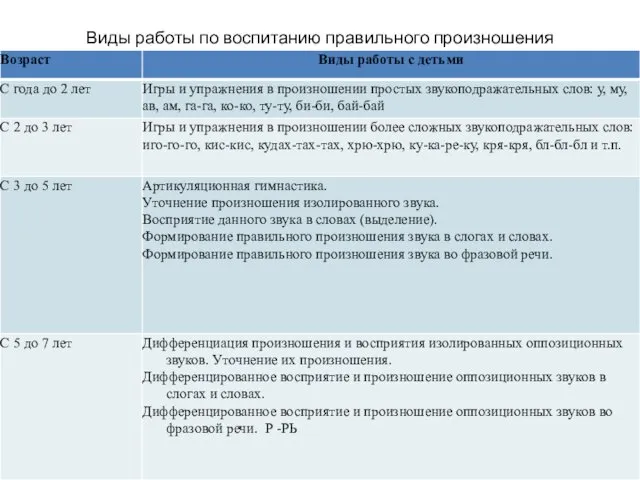 Виды работы по воспитанию правильного произношения
Виды работы по воспитанию правильного произношения Отгадай слово по первым звукам
Отгадай слово по первым звукам Реформы в 1900 – 1912 гг
Реформы в 1900 – 1912 гг Электрические трансформаторы. Расчет трансформаторов
Электрические трансформаторы. Расчет трансформаторов класс Вред
класс Вред Морфологический разбор имени существительного
Морфологический разбор имени существительного Инструктаж по ТБ и ОТ. Введение: инструктаж, знакомство
Инструктаж по ТБ и ОТ. Введение: инструктаж, знакомство Прсоединение Крыма к России
Прсоединение Крыма к России Каменный век на Кавказе
Каменный век на Кавказе Контроль за точністю руху сільськогосподарської техніки та обладнання
Контроль за точністю руху сільськогосподарської техніки та обладнання К. Паустовский Теплый хлеб
К. Паустовский Теплый хлеб Анализ работы фонда скважин Сологаевского месторождения пласта Д
Анализ работы фонда скважин Сологаевского месторождения пласта Д Мастер-класс Использование технологии развития критического мышления через чтение и письмо на примере урока чтения во 2 классе по теме В. Драгунский Заколдованная буква
Мастер-класс Использование технологии развития критического мышления через чтение и письмо на примере урока чтения во 2 классе по теме В. Драгунский Заколдованная буква Microsoft Word. Создание первого документа Word
Microsoft Word. Создание первого документа Word практические работы
практические работы Цели компании Coca-Cola
Цели компании Coca-Cola Презентация Дифференциация звуков Б-П
Презентация Дифференциация звуков Б-П مهارات الحاسب الآلي
مهارات الحاسب الآلي Презентация Петр Великий
Презентация Петр Великий Авраам Линкольн
Авраам Линкольн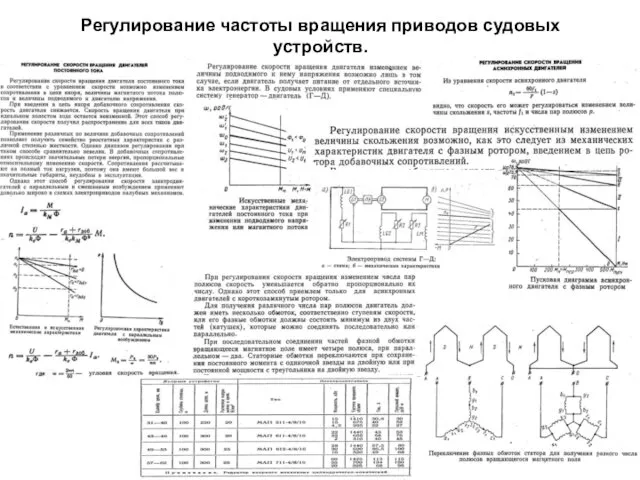 Регулирование частоты вращения приводов судовых устройств. Техническое обслуживание Дизель-генераторов. (Билет 30)
Регулирование частоты вращения приводов судовых устройств. Техническое обслуживание Дизель-генераторов. (Билет 30) Путешествие в космос
Путешествие в космос