- Многофункциональный scara манипулятор

Содержание
- 2. Цели и задачи Цель: Собрать рабочий прототип манипулятора Задачи: Определится с механикой манипулятора Спроектировать и собрать
- 3. Механика манипулятора Механику я выбирал по нескольким критериям: Легкость сборки Удобство расчётов углов по координатам Без
- 4. 1) Сам SCARA-робот, оригинальное исполнение. Один шаговый мотор приводит в движение внутренний рычаг, на котором установлен
- 5. 2) Это уже Morgan SCARA. Отличия от оригинального SCARA : шаговые моторы установлены стационарно, что значительно
- 6. 3) Parallel Scara .В отличии от Morgan Scara внутренние рычаги находятся не на одной оси вращения.
- 7. Комплетующие для сборки Плата Arduino Mega Pro Два шаговых мотора 28BYJ-48 с драйвером ULN2003 Модуль SD-reader
- 8. Программы КОМПАС 3D и Fusion 360 для создания деталей. Arduino IDE для программирования Fritzing для создания
- 9. Сборка из детaлей в Fusion 360
- 10. Деталь для крепления двух половинок в КОМПАС 3D
- 11. Схема подключения в Fritzing
- 12. Многофункциональность На конце звеньев распологается магнитный захват, благодаря ему можно быстро менять необходимые модули: Модуль горизонтального
- 13. Программирование Программировал я довольно много, начал с маленьких функций , а потом с каждой новой программой
- 20. Программа для расчёта углов из координат
- 22. Плюсы и минусы Плюсы: Получилось собрать рабочую модель Есть возможность улучшений Красивый внешний вид Минусы: Конструкция
- 23. Вывод Я создал рабочий прототип манипулятора Научился программировать сложные проекты и составлять схемы Решил поставленные задачи
- 25. Скачать презентацию
Цели и задачи
Цель:
Собрать рабочий прототип манипулятора
Задачи:
Определится с механикой манипулятора
Спроектировать и собрать
Цели и задачи
Цель:
Собрать рабочий прототип манипулятора
Задачи:
Определится с механикой манипулятора
Спроектировать и собрать
Механика манипулятора
Механику я выбирал по нескольким критериям:
Легкость сборки
Удобство расчётов углов по
Механика манипулятора
Механику я выбирал по нескольким критериям:
Легкость сборки
Удобство расчётов углов по
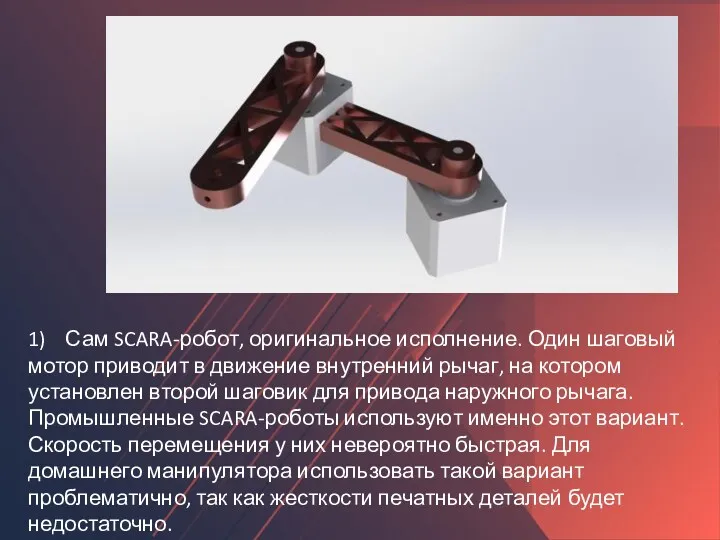
1) Сам SCARA-робот, оригинальное исполнение. Один шаговый мотор приводит в движение
1) Сам SCARA-робот, оригинальное исполнение. Один шаговый мотор приводит в движение

2) Это уже Morgan SCARA. Отличия от оригинального SCARA : шаговые
2) Это уже Morgan SCARA. Отличия от оригинального SCARA : шаговые

3) Parallel Scara .В отличии от Morgan Scara внутренние рычаги находятся
3) Parallel Scara .В отличии от Morgan Scara внутренние рычаги находятся
Комплетующие для сборки
Плата Arduino Mega Pro
Два шаговых мотора 28BYJ-48 с
Комплетующие для сборки
Плата Arduino Mega Pro
Два шаговых мотора 28BYJ-48 с
Программы
КОМПАС 3D и Fusion 360 для создания деталей.
Arduino IDE
Программы
КОМПАС 3D и Fusion 360 для создания деталей.
Arduino IDE
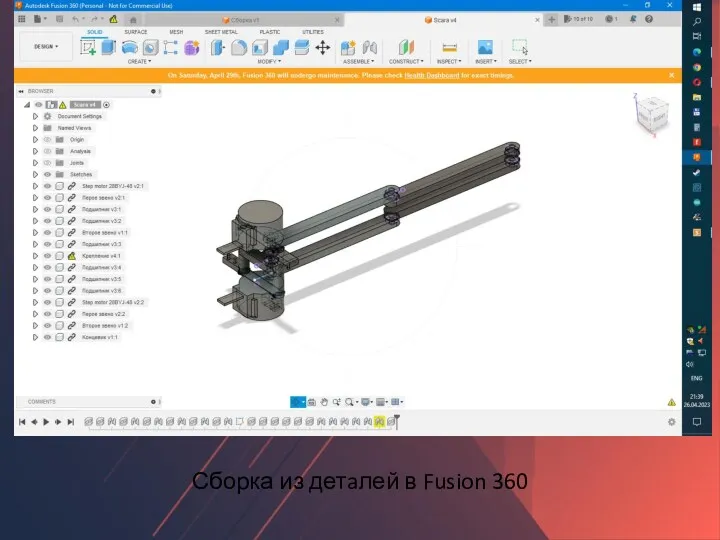
Сборка из детaлей в Fusion 360
Сборка из детaлей в Fusion 360
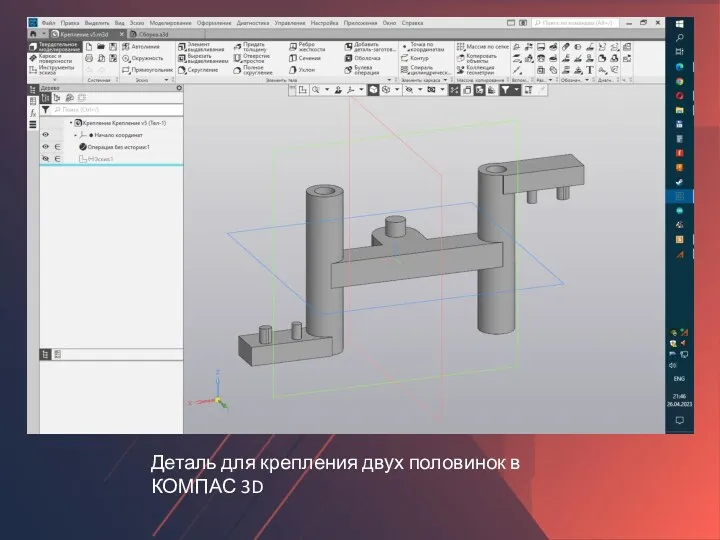
Деталь для крепления двух половинок в КОМПАС 3D
Деталь для крепления двух половинок в КОМПАС 3D
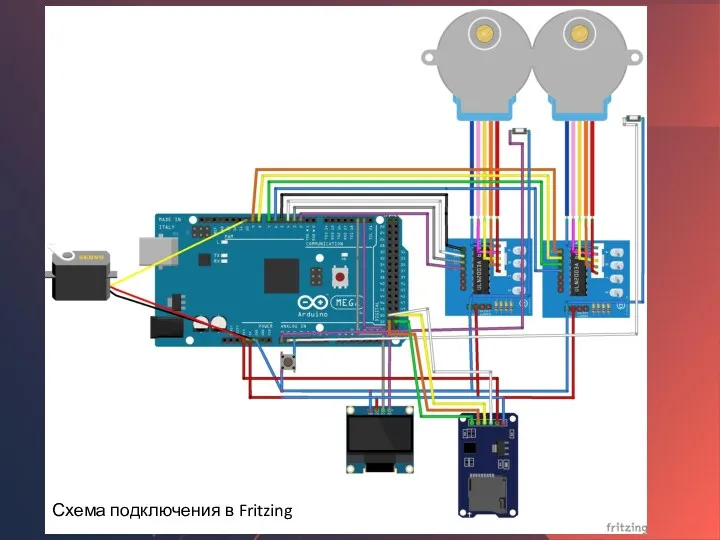
Схема подключения в Fritzing
Схема подключения в Fritzing
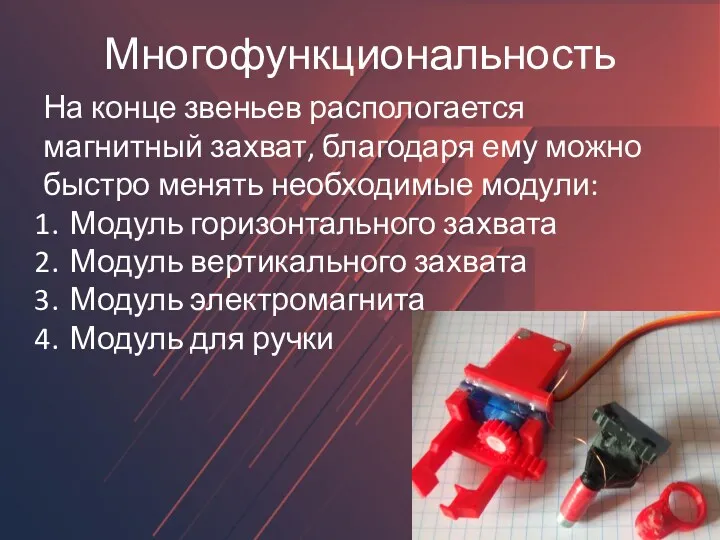
Многофункциональность
На конце звеньев распологается магнитный захват, благодаря ему можно быстро менять
Многофункциональность
На конце звеньев распологается магнитный захват, благодаря ему можно быстро менять
Программирование
Программировал я довольно много, начал с маленьких функций , а потом
Программирование
Программировал я довольно много, начал с маленьких функций , а потом
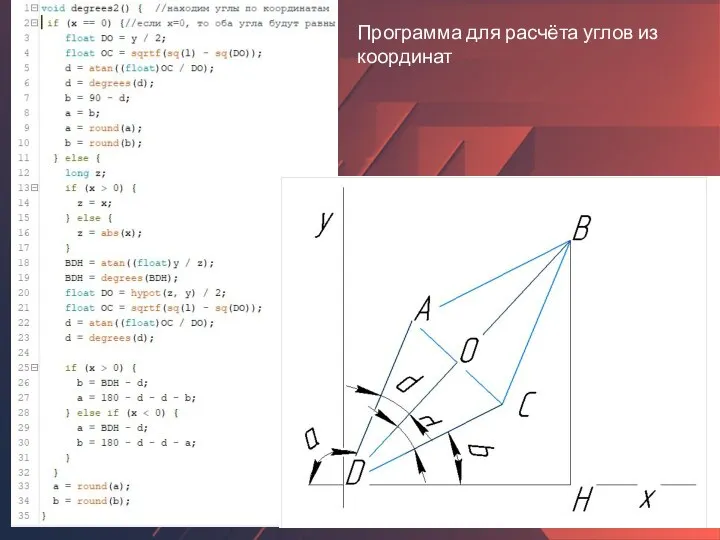
Программа для расчёта углов из координат
Программа для расчёта углов из координат
Плюсы и минусы
Плюсы:
Получилось собрать рабочую модель
Есть возможность улучшений
Красивый внешний вид
Минусы:
Конструкция оказалась
Плюсы и минусы
Плюсы:
Получилось собрать рабочую модель
Есть возможность улучшений
Красивый внешний вид
Минусы:
Конструкция оказалась
Вывод
Я создал рабочий прототип манипулятора
Научился программировать сложные проекты и составлять схемы
Решил
Вывод
Я создал рабочий прототип манипулятора
Научился программировать сложные проекты и составлять схемы
Решил
 Нормотимические средства (соли лития)
Нормотимические средства (соли лития) Восстание под руководством Емельяна Пугачёва (1773 – 1775 гг.)
Восстание под руководством Емельяна Пугачёва (1773 – 1775 гг.) Тема родительского собрания №3 Родителям о внимании и внимательности
Тема родительского собрания №3 Родителям о внимании и внимательности История дистанционного образования
История дистанционного образования Классификация металлорежущих станков и движений в них. Тема 1
Классификация металлорежущих станков и движений в них. Тема 1 Конкурс кабинетов информатики
Конкурс кабинетов информатики Фиктивные переменные в регрессионных моделях
Фиктивные переменные в регрессионных моделях Алюминий
Алюминий Стандарты текстов
Стандарты текстов Forbidden City
Forbidden City Традиції нашої сім’ї
Традиції нашої сім’ї Использование функционала Электронный дневник Единого портала Государственных Муниципальных Услуг
Использование функционала Электронный дневник Единого портала Государственных Муниципальных Услуг This is your presentation title
This is your presentation title Анекдоты и карикатуры на тему: Как сегодня россияне заботятся о здоровье
Анекдоты и карикатуры на тему: Как сегодня россияне заботятся о здоровье Виды юбок
Виды юбок Логические схемы
Логические схемы Перендикулярные прямые
Перендикулярные прямые Животные для малышей
Животные для малышей Интерактивная дидактическая игра Один дома
Интерактивная дидактическая игра Один дома Гидрогенизационные процессы нефтепереработки
Гидрогенизационные процессы нефтепереработки distant_lesson-reading 6
distant_lesson-reading 6 Основные виды сырья, используемые на FLLC MEBELAIN
Основные виды сырья, используемые на FLLC MEBELAIN Матматичская игра Звездый час
Матматичская игра Звездый час Родительское собрание о пользе здорового питания
Родительское собрание о пользе здорового питания Свайные фундаменты. Часть 2
Свайные фундаменты. Часть 2 День солидарности в борьбе с терроризмом
День солидарности в борьбе с терроризмом Средняя общеобразовательная школа на 450 ученических мест в г. Краснослободске
Средняя общеобразовательная школа на 450 ученических мест в г. Краснослободске Лучший школьный музей памяти Великой Отечественной войны
Лучший школьный музей памяти Великой Отечественной войны