- Оcновы определения места судна в море

Содержание
- 2. ПРОДОЛЖЕНИЕ Контроль за счислением пути судна осуществляется постоянной проверкой правильности учета элементов счисления (погрешности не исключаются
- 3. 12.1.2. Навигационные параметры и изолинии Совокупность величин, характеризующих место судна в море и его перемещение в
- 4. ВИДЫ ИЗОЛИНИЙ В зависимости от характера навигационного параметра (значение пеленга на ориентир, величина расстояния до ориентира,
- 5. 2. Навигационная изолиния при измерении пеленга на ориентир (изопеленга) Рис. 12.3. Изопеленга Линия пеленга на путевой
- 6. 3. Навигационная изолиния при измерении горизонтального угла между двумя ориентирами (изогона) Рис. 12.4. Изогона При измерении
- 7. 12.2. Сущность определения места судна по навигационным изолиниям Мы установили, что фактическое место судна всегда находится
- 8. 12.3. Приведение навигационных параметров и изолиний к одному месту (моменту) Если навигационные параметры, по которым определяется
- 9. Выводы Исключение погрешностей в счислении пути судна достигается путем систематического контроля за счислением его координат и
- 10. ГЛАВА 13. ОПРЕДЕЛЕНИЕ МЕСТА СУДНА ПО НАПРАВЛЕНИЯМ НА ВИДИМЫЕ НАВИГАЦИОННЫЕ ОРИЕНТИРЫ 13.1. Определение места судна по
- 11. ШТУРМАНСКИЙ ИНСТРУМЕНТ РАБОТА НА МОРСКОЙ НАВИГАЦИОННОЙ КАРТЕ
- 12. СОВРЕМЕННЫЙ ВИД ХОДОВОГО МОСТИКА
- 13. ПОРЯДОК РАБОТЫ ШТУРМАНСКИМ ИНСТРУМЕНТОМ Рис. 7.2. Оформление графического счисления пути судна на путевой карте 1. По
- 14. РАБОТА ШТУРМАНСКИМ ИНСТРУМЕНТОМ ИЗМЕРЕНИЕ РАССТОЯНИЙ
- 15. ПРОДОЛЖЕНИЕ – поправка магнитного компаса. Над проведенной из точки якорной стоянки линией истинного курса (линией пути)
- 16. 7.2.2. Требования к оформлению счисления пути судна на карте При работе на карте все условные обозначения
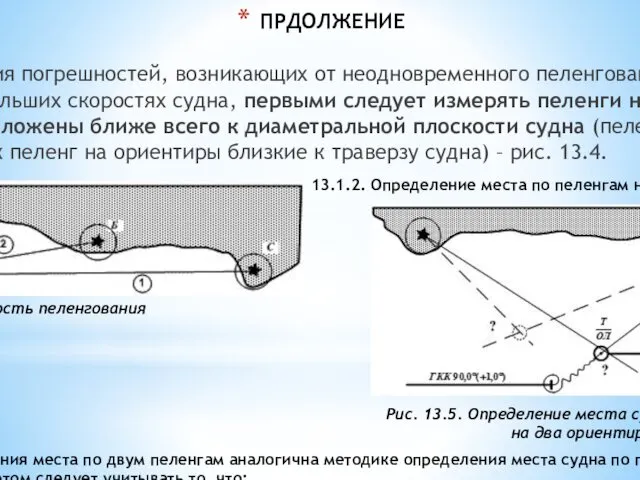
- 17. ПРДОЛЖЕНИЕ Для уменьшения погрешностей, возникающих от неодновременного пеленгования ориентиров, особенно на больших скоростях судна, первыми следует
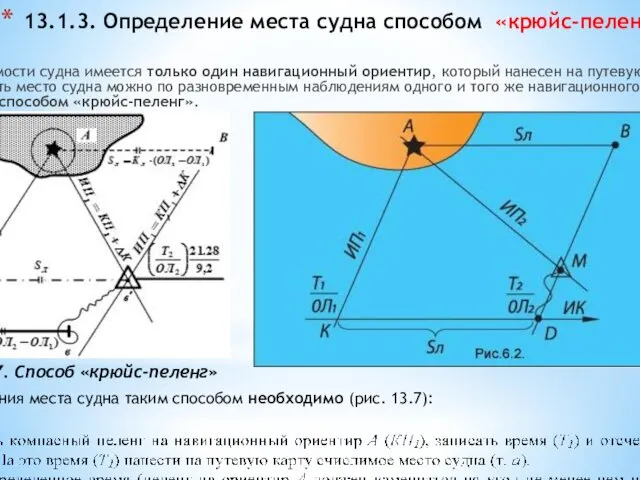
- 18. 13.1.3. Определение места судна способом «крюйс-пеленг» Если в видимости судна имеется только один навигационный ориентир, который
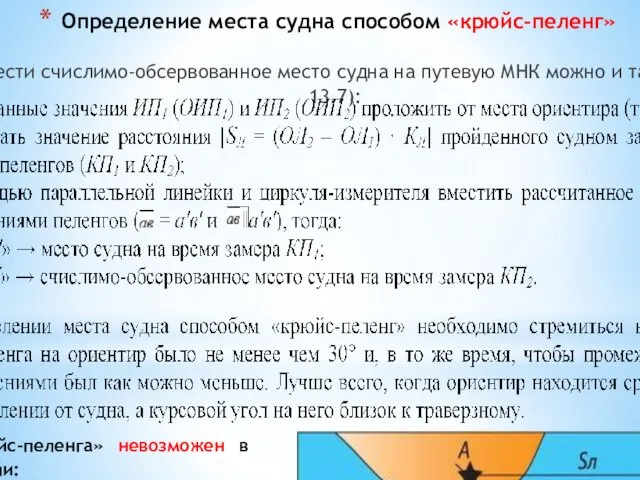
- 19. Определение места судна способом «крюйс-пеленг» Нанести счислимо-обсервованное место судна на путевую МНК можно и так (рис.
- 20. 13.2. Определение места судна по двум горизонтальным углам трех береговых ориентиров 13.2.1. Сущность способа Определение места
- 21. АЛГОРИТМ - (последовательность) действий при определении места по 2-м горизонтальным углам Для реализации данного способа: 1)
- 22. Секстан навигационный измерительный инструмент Протрактор Протра́ктор (от лат. pro — перед и traho — тяну, веду)
- 23. 13.2.2. Способы нанесения обсервованного места судна на путевую карту а) Нанесение обсервованного места судна на путевую
- 24. б) Нанесение обсервованного места судна на путевую карту с помощью листа кальки. В тех случаях, когда
- 25. в) Нанесение обсервованного места судна на путевую карту путем графического построения навигационных изолиний. Для получения обсервованного
- 26. Неопределенный случай При определении места судна по двум горизонтальным углам может быть случай, при котором обсервованное
- 27. ГЛАВА 14. ОПРЕДЕЛЕНИЕ МЕСТА СУДНА ПО РАССТОЯНИЯМ ДО ВИДИМЫХ НАВИГАЦИОННЫХ ОРИЕНТИРОВ 14.1. Средства и способы определения
- 28. 14.1.3. Расчет расстояния до ориентира по измерению его вертикального угла Эта задача может быть решена двумя
- 29. 14.2. Определение места судна по расстояниям до навигационных ориентиров 14.2.1. Определение места судна по двум расстояниям
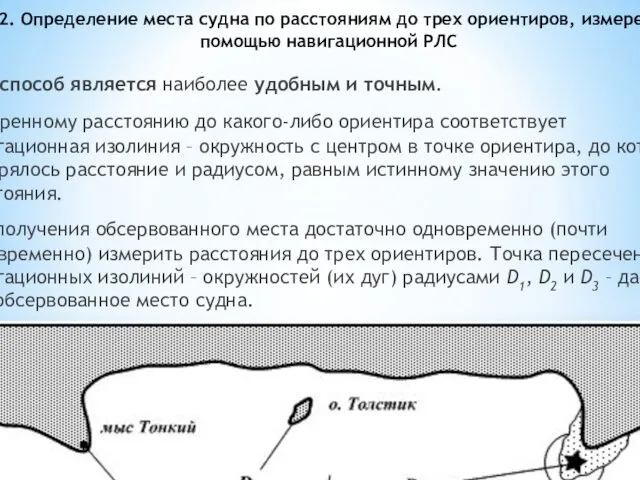
- 30. 14.2.2. Определение места судна по расстояниям до трех ориентиров, измеренных с помощью навигационной РЛС Этот способ
- 31. 14.2.3. Определение места судна по расстояниям до двух ориентиров Если в видимости судна (на экране навигационной
- 32. 14.2.4. Определение места судна способом «крюйс-расстояние» Рис. 14.8. Способ «крюйс-расстояние» Точность этого способа зависит от погрешностей
- 33. 14.2.5. Определение места судна по пеленгу и расстоянию до ориентира Данный способ определения места судна относится
- 35. Скачать презентацию
ПРОДОЛЖЕНИЕ
Контроль за счислением пути судна осуществляется постоянной проверкой правильности учета элементов
ПРОДОЛЖЕНИЕ
Контроль за счислением пути судна осуществляется постоянной проверкой правильности учета элементов
12.1.2. Навигационные параметры и изолинии
Совокупность величин, характеризующих место судна в море
12.1.2. Навигационные параметры и изолинии
Совокупность величин, характеризующих место судна в море

ВИДЫ ИЗОЛИНИЙ
В зависимости от характера навигационного параметра (значение пеленга на ориентир,
ВИДЫ ИЗОЛИНИЙ
В зависимости от характера навигационного параметра (значение пеленга на ориентир,
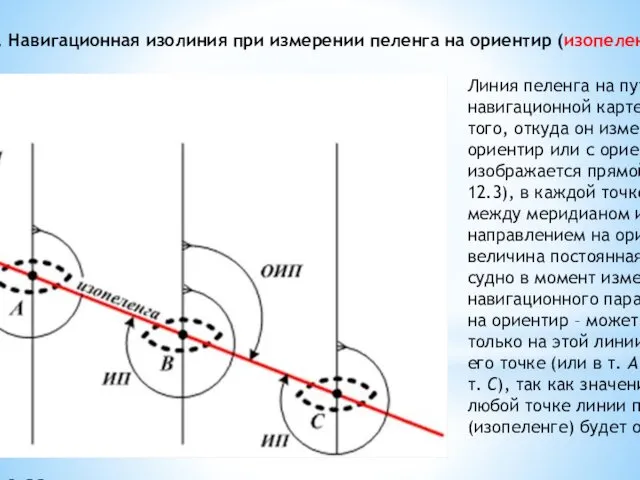
2. Навигационная изолиния при измерении пеленга на ориентир (изопеленга)
Рис. 12.3. Изопеленга
Линия
2. Навигационная изолиния при измерении пеленга на ориентир (изопеленга)
Рис. 12.3. Изопеленга
Линия
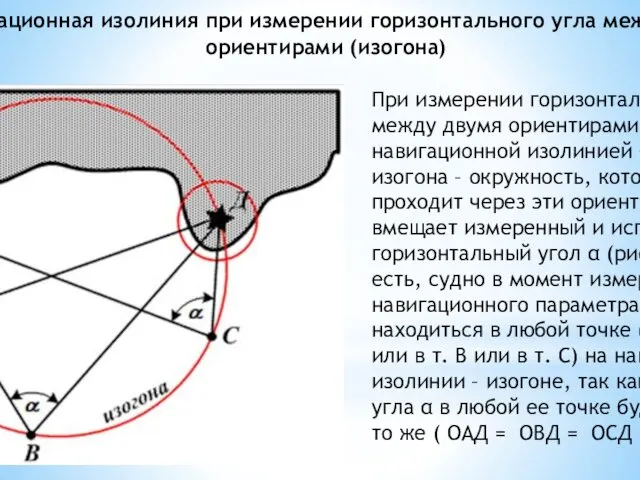
3. Навигационная изолиния при измерении горизонтального угла между двумя ориентирами (изогона)
Рис.
3. Навигационная изолиния при измерении горизонтального угла между двумя ориентирами (изогона)
Рис.
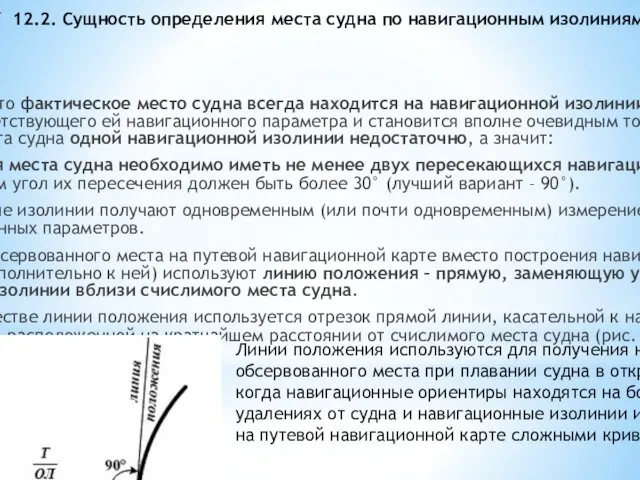
12.2. Сущность определения места судна по навигационным изолиниям
Мы установили, что фактическое
12.2. Сущность определения места судна по навигационным изолиниям
Мы установили, что фактическое
12.3. Приведение навигационных параметров и изолиний к одному месту (моменту)
Если навигационные
12.3. Приведение навигационных параметров и изолиний к одному месту (моменту)
Если навигационные
Выводы
Исключение погрешностей в счислении пути судна достигается путем систематического контроля за
Выводы
Исключение погрешностей в счислении пути судна достигается путем систематического контроля за
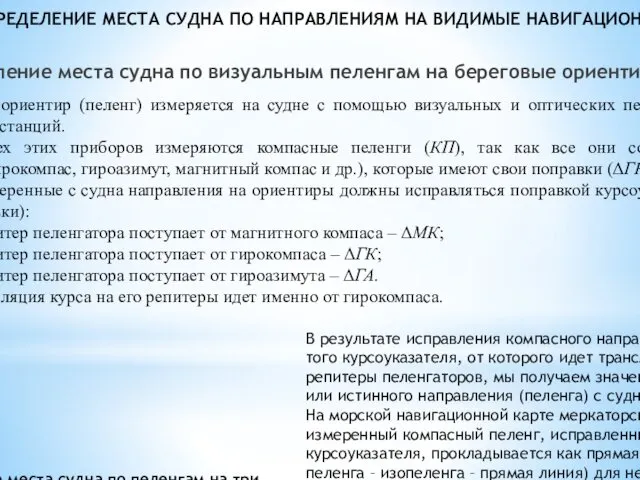
ГЛАВА 13. ОПРЕДЕЛЕНИЕ МЕСТА СУДНА ПО НАПРАВЛЕНИЯМ НА ВИДИМЫЕ НАВИГАЦИОННЫЕ ОРИЕНТИРЫ
ГЛАВА 13. ОПРЕДЕЛЕНИЕ МЕСТА СУДНА ПО НАПРАВЛЕНИЯМ НА ВИДИМЫЕ НАВИГАЦИОННЫЕ ОРИЕНТИРЫ
ШТУРМАНСКИЙ ИНСТРУМЕНТ
РАБОТА НА МОРСКОЙ НАВИГАЦИОННОЙ КАРТЕ
ШТУРМАНСКИЙ ИНСТРУМЕНТ
РАБОТА НА МОРСКОЙ НАВИГАЦИОННОЙ КАРТЕ

СОВРЕМЕННЫЙ ВИД ХОДОВОГО МОСТИКА
СОВРЕМЕННЫЙ ВИД ХОДОВОГО МОСТИКА
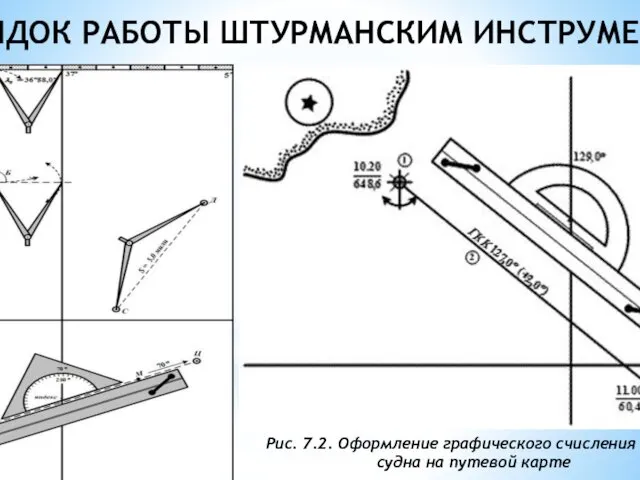
ПОРЯДОК РАБОТЫ ШТУРМАНСКИМ ИНСТРУМЕНТОМ
Рис. 7.2. Оформление графического счисления пути судна на
ПОРЯДОК РАБОТЫ ШТУРМАНСКИМ ИНСТРУМЕНТОМ
Рис. 7.2. Оформление графического счисления пути судна на
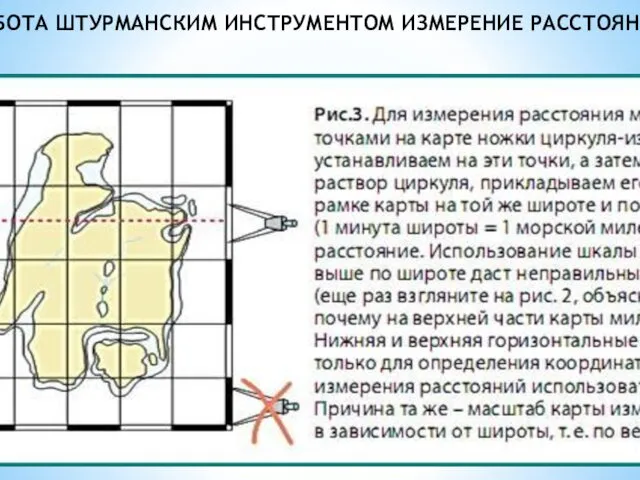
РАБОТА ШТУРМАНСКИМ ИНСТРУМЕНТОМ ИЗМЕРЕНИЕ РАССТОЯНИЙ
РАБОТА ШТУРМАНСКИМ ИНСТРУМЕНТОМ ИЗМЕРЕНИЕ РАССТОЯНИЙ
ПРОДОЛЖЕНИЕ
– поправка магнитного компаса.
Над проведенной из точки якорной стоянки линией истинного
ПРОДОЛЖЕНИЕ
– поправка магнитного компаса.
Над проведенной из точки якорной стоянки линией истинного
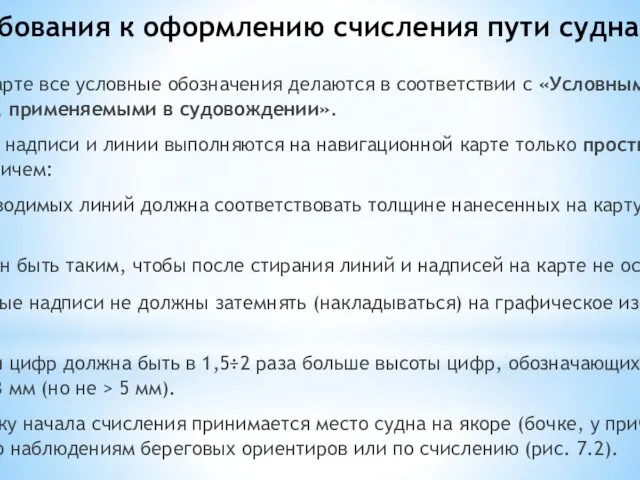
7.2.2. Требования к оформлению счисления пути судна на карте
При работе на
7.2.2. Требования к оформлению счисления пути судна на карте
При работе на
ПРДОЛЖЕНИЕ
Для уменьшения погрешностей, возникающих от неодновременного пеленгования ориентиров, особенно на больших
ПРДОЛЖЕНИЕ
Для уменьшения погрешностей, возникающих от неодновременного пеленгования ориентиров, особенно на больших
13.1.3. Определение места судна способом «крюйс-пеленг»
Если в видимости судна имеется только
13.1.3. Определение места судна способом «крюйс-пеленг»
Если в видимости судна имеется только
Определение места судна способом «крюйс-пеленг»
Нанести счислимо-обсервованное место судна на путевую МНК
Определение места судна способом «крюйс-пеленг»
Нанести счислимо-обсервованное место судна на путевую МНК
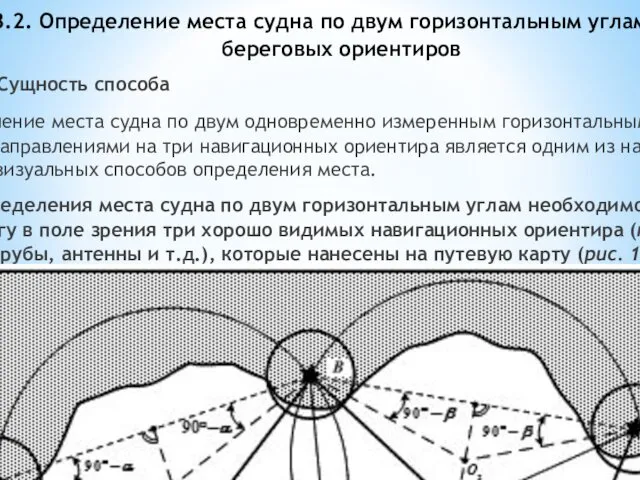
13.2. Определение места судна по двум горизонтальным углам трех береговых ориентиров
13.2.1.
13.2. Определение места судна по двум горизонтальным углам трех береговых ориентиров
13.2.1.
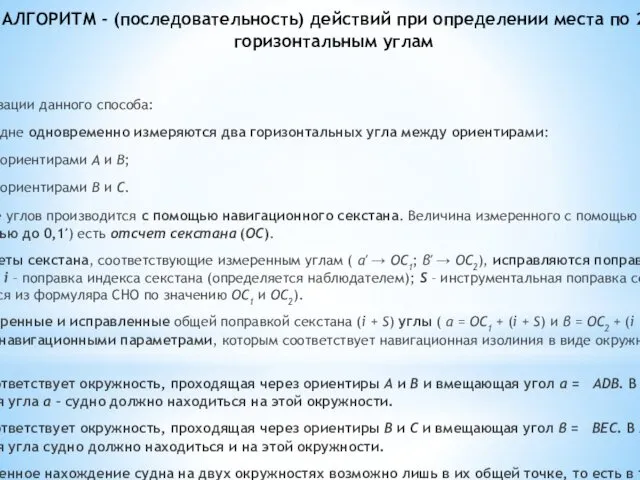
АЛГОРИТМ - (последовательность) действий при определении места по 2-м горизонтальным углам
Для
АЛГОРИТМ - (последовательность) действий при определении места по 2-м горизонтальным углам
Для

Секстан навигационный измерительный инструмент
Протрактор
Протра́ктор (от лат. pro — перед и traho — тяну,
Секстан навигационный измерительный инструмент
Протрактор
Протра́ктор (от лат. pro — перед и traho — тяну,

13.2.2. Способы нанесения обсервованного места судна на путевую карту
а) Нанесение обсервованного
13.2.2. Способы нанесения обсервованного места судна на путевую карту
а) Нанесение обсервованного
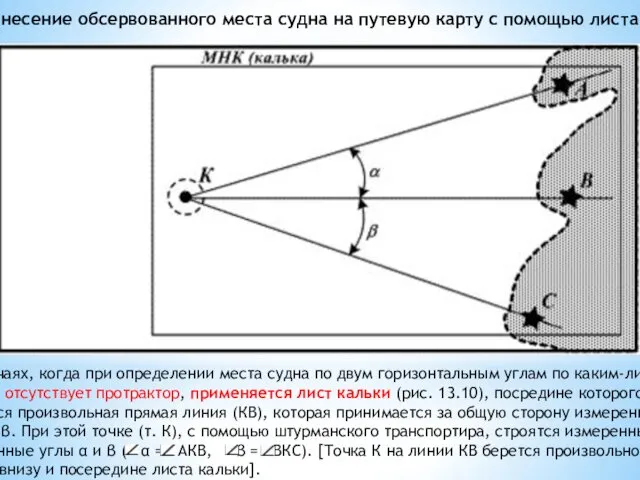
б) Нанесение обсервованного места судна на путевую карту с помощью листа
б) Нанесение обсервованного места судна на путевую карту с помощью листа

в) Нанесение обсервованного места судна на путевую карту путем графического построения
в) Нанесение обсервованного места судна на путевую карту путем графического построения
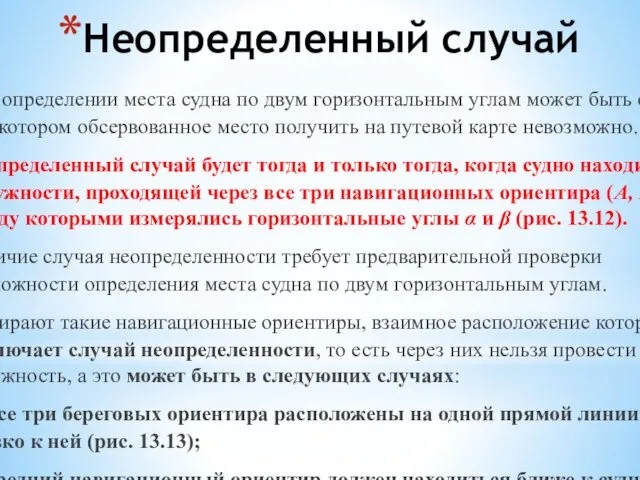
Неопределенный случай
При определении места судна по двум горизонтальным углам может
Неопределенный случай
При определении места судна по двум горизонтальным углам может
ГЛАВА 14. ОПРЕДЕЛЕНИЕ МЕСТА СУДНА ПО РАССТОЯНИЯМ ДО ВИДИМЫХ НАВИГАЦИОННЫХ ОРИЕНТИРОВ
ГЛАВА 14. ОПРЕДЕЛЕНИЕ МЕСТА СУДНА ПО РАССТОЯНИЯМ ДО ВИДИМЫХ НАВИГАЦИОННЫХ ОРИЕНТИРОВ
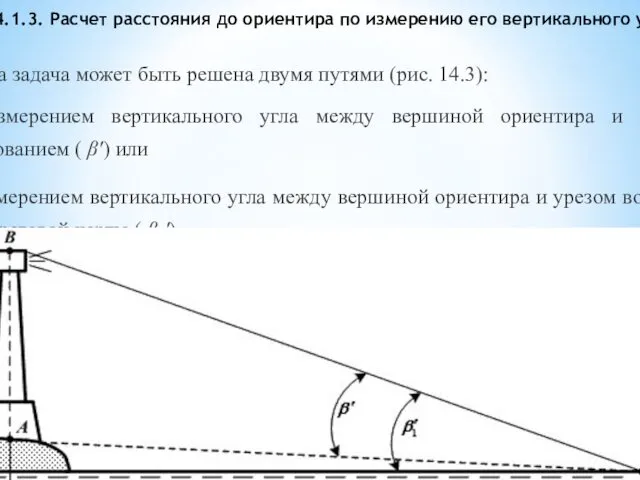
14.1.3. Расчет расстояния до ориентира по измерению его вертикального угла
Эта задача
14.1.3. Расчет расстояния до ориентира по измерению его вертикального угла
Эта задача
14.2. Определение места судна по расстояниям до навигационных ориентиров
14.2.1. Определение места
14.2. Определение места судна по расстояниям до навигационных ориентиров
14.2.1. Определение места
14.2.2. Определение места судна по расстояниям до трех ориентиров, измеренных с
14.2.2. Определение места судна по расстояниям до трех ориентиров, измеренных с

14.2.3. Определение места судна по расстояниям до двух ориентиров
Если в видимости
14.2.3. Определение места судна по расстояниям до двух ориентиров
Если в видимости
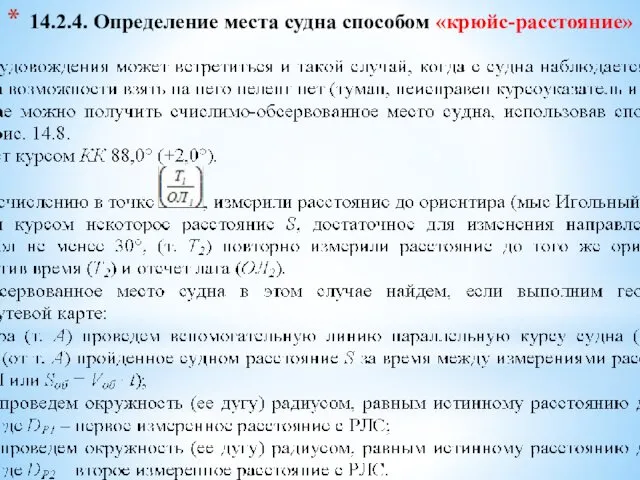
14.2.4. Определение места судна способом «крюйс-расстояние»
Рис. 14.8. Способ «крюйс-расстояние»
Точность этого
14.2.4. Определение места судна способом «крюйс-расстояние»
Рис. 14.8. Способ «крюйс-расстояние»
Точность этого

14.2.5. Определение места судна по пеленгу и расстоянию до ориентира
Данный способ
14.2.5. Определение места судна по пеленгу и расстоянию до ориентира
Данный способ
 Презентация по теме Рельеф Ульяновской области
Презентация по теме Рельеф Ульяновской области Пирамида
Пирамида Оснастка для снятия , наведения запорной арматуры и выполнения других операций
Оснастка для снятия , наведения запорной арматуры и выполнения других операций Терроризм. Черты терроризма
Терроризм. Черты терроризма Iшек өтімсіздігі
Iшек өтімсіздігі Александр Сергеевич Пушкин Капитанская дочка. 8 класс
Александр Сергеевич Пушкин Капитанская дочка. 8 класс tema2_3
tema2_3 Розы из бумаги
Розы из бумаги Историко-культурные предпосылки создания психоанализа
Историко-культурные предпосылки создания психоанализа Emergencies in Gynecology
Emergencies in Gynecology Аварии на химически опасных объектах и химическое заражение окружающей среды
Аварии на химически опасных объектах и химическое заражение окружающей среды Причины перерастания пожаров в крупные
Причины перерастания пожаров в крупные Гражданская война 1918 и интервенция 1918-1921
Гражданская война 1918 и интервенция 1918-1921 О раннем обучении английскому языку через интеграцию образовательных областей Физкультура и Коммуникация
О раннем обучении английскому языку через интеграцию образовательных областей Физкультура и Коммуникация Религии мира 2
Религии мира 2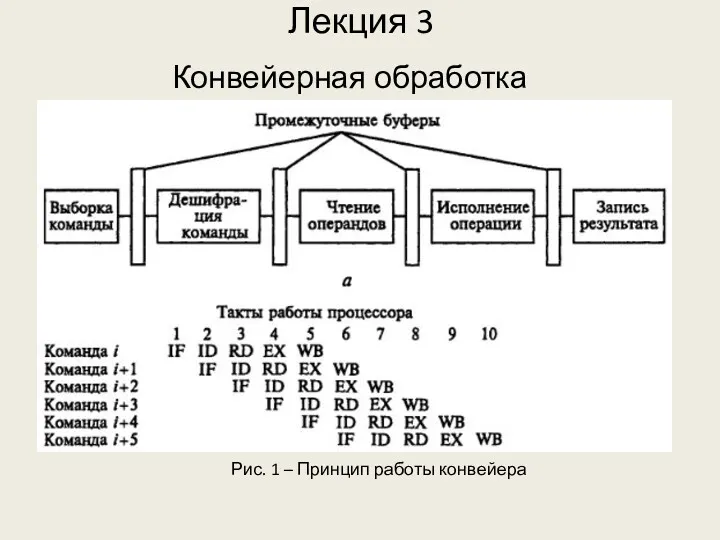 Конвейерная обработка
Конвейерная обработка Даниил Гранин
Даниил Гранин Птеродактиль
Птеродактиль С Новым Годом
С Новым Годом О. Генри. Дары волхвов
О. Генри. Дары волхвов Возникновение христианства
Возникновение христианства Обеспечение безопасности информации, сопровождающейся разработкой программного продукта для криптографической защиты
Обеспечение безопасности информации, сопровождающейся разработкой программного продукта для криптографической защиты Грибы-паразиты
Грибы-паразиты Fintegra - Регистрация инвестиционной платформы
Fintegra - Регистрация инвестиционной платформы Классификация правовых систем по Р. Давиду
Классификация правовых систем по Р. Давиду Презентация: Психологические особенности учеников 4 класса
Презентация: Психологические особенности учеников 4 класса Плата сбора данных ЛА 2М3
Плата сбора данных ЛА 2М3 День Святого Валентина
День Святого Валентина