- Оценка положения и скорости электропривода средствами МК

Содержание
- 2. Оценка положения и скорости электропривода средствами МК
- 3. Датчики положения и скорости на элементах Холла. Применение модуля захвата eCAP.
- 4. Измерение скорости вращения различных машин, например, с помощью датчиков на основе элементов Холла; Измерение времени между
- 5. Установка элементов Холла
- 6. Сигнал с 3-х датчиков
- 7. Сигнал и его обработка с 3-х датчиков
- 8. Сигнал и его обработка с 3-х датчиков
- 9. Сигнал и его обработка с 3-х датчиков
- 10. РАСЧЕТ СКОРОСТИ
- 11. РАСЧЕТ СКОРОСТИ
- 12. 32-битовый модуль базового времени 32-разрядный регистр «временного штампа» внешних событий – времени захвата; Предварительный делитель частоты
- 13. Блок схема eCAP
- 14. Блок схема eCAP
- 15. Возможности расширенного модуля захвата
- 16. Предварительный делитель событий (Event Prescaler) Входной сигнал, подлежащий захвату, и представляющий собой последовательность импульсов может быть
- 17. Селектор полярности перепада и квалификатор событий Используются четыре независящих друг от друга селектора полярности перепада входного
- 18. Возможности расширенного модуля захвата
- 19. Режим одно-кратного и непрерывного захвата событий Счетчик событий является 2-битовым и инкрементируется по перепаду каждого детектированного
- 20. 32-разрядный счетчик и управление фазой Этот счетчик обеспечивает временную базу для модуля захвата событий и тактируется
- 21. Регистры «временных штампов» CAP1-CAP4 32-разрядные регистры «временных штампов» захваченных внешних событий CAP1-CAP4 подключены к 32-разрядной шине
- 22. Управление прерываниями Прерывания могут генерироваться по: любому из захваченных внешних событий по переполнению базового таймера CTROVF
- 23. Квадратурные (оптические) датчики положения и скорости. Применение модуля обработки квадратурного сигнала eQEP.
- 24. Сигналы с датчика
- 25. Сигналы с датчика
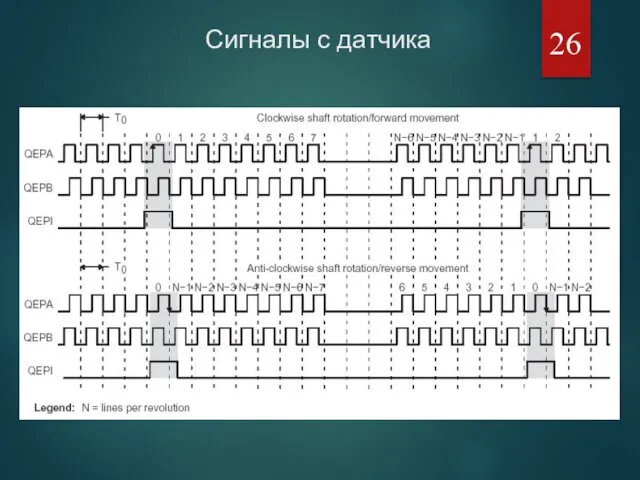
- 26. Сигналы с датчика
- 27. Квадратурные энкодеры различных производителей могут иметь разную форму (реперного) индексного сигнала, как показано на рисунке. Индексный
- 28. Функциональная схема eQEP
- 29. Детектирование направления движения
- 30. Режим «квадратурного» счета
- 31. Другие режимы счёта Режим «направленного» счета Этот режим используется тогда, когда сам датчик положения содержит в
- 32. Режимы работы счётчик положения Сброс счетчика положения по индексному (реперному) событию (Index Event). Применяется для измерения
- 33. Сброс счетчика положения по индексному (реперному) событию
- 34. Операции сброса и установки счетчика положения при положительных и отрицательных переполнениях при QPOSMAX=4
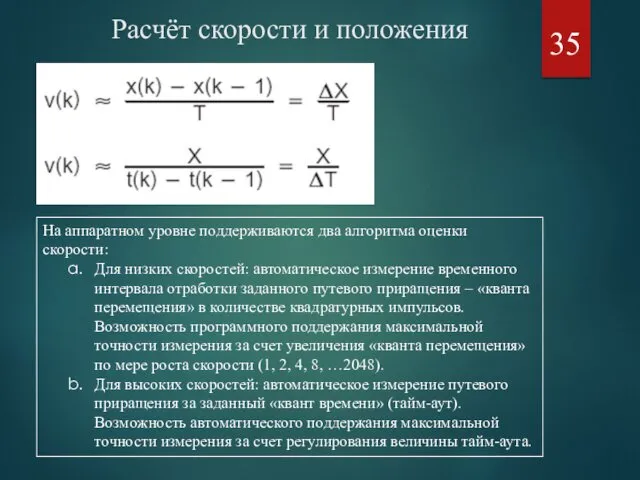
- 35. Расчёт скорости и положения На аппаратном уровне поддерживаются два алгоритма оценки скорости: Для низких скоростей: автоматическое
- 36. Технология расчета скорости
- 37. Расчет скорости на основе измерения периода импульсов инкрементального датчика
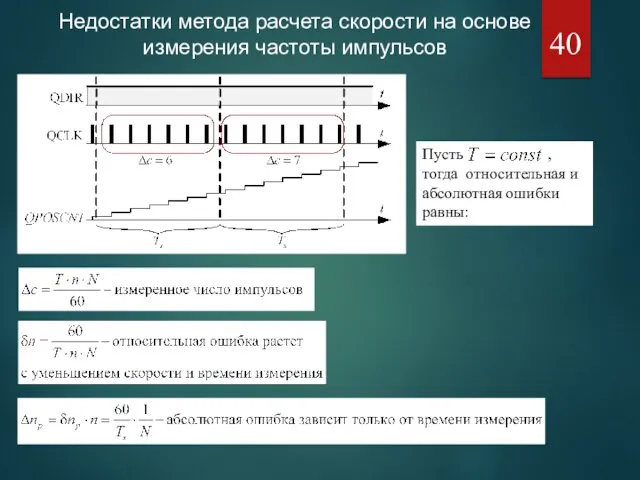
- 38. Недостатки метода расчета скорости на основе измерения периода импульсов Пусть , тогда относительная и абсолютная ошибки
- 39. Расчет скорости на основе измерения частоты импульсов инкрементального датчика
- 40. Пусть , тогда относительная и абсолютная ошибки равны: Недостатки метода расчета скорости на основе измерения частоты
- 41. Комбинированный метод измерения скорости Оптимальная скорость переключения – при которой относительные ошибки предыдущих методов равны: До
- 42. Синхронизированный метод постоянного времени измерения С помощью энкодера QEP и модуля захвата CAP получаем следующие данные:
- 43. Синхронизированный метод постоянного времени измерения Вызов Рег. Скор. Вызов Рег. Скор. В случае, когда количество импульсов,
- 44. Синхронизированный метод постоянного времени измерения Вызов Рег. Скор. Вызов Рег. Скор. Если количество импульсов, прошедших между
- 46. Скачать презентацию
Оценка положения
и скорости электропривода средствами МК
Оценка положения
и скорости электропривода средствами МК
Датчики положения и скорости на элементах Холла.
Применение модуля захвата eCAP.
Датчики положения и скорости на элементах Холла.
Применение модуля захвата eCAP.
Измерение скорости вращения различных машин, например, с помощью датчиков на основе
Измерение скорости вращения различных машин, например, с помощью датчиков на основе
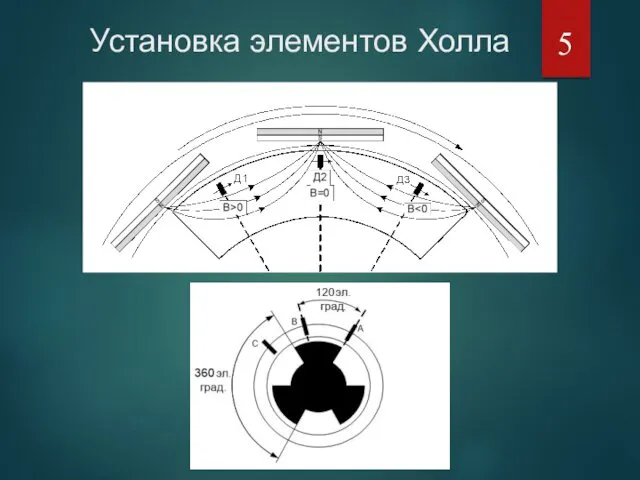
Установка элементов Холла
Установка элементов Холла
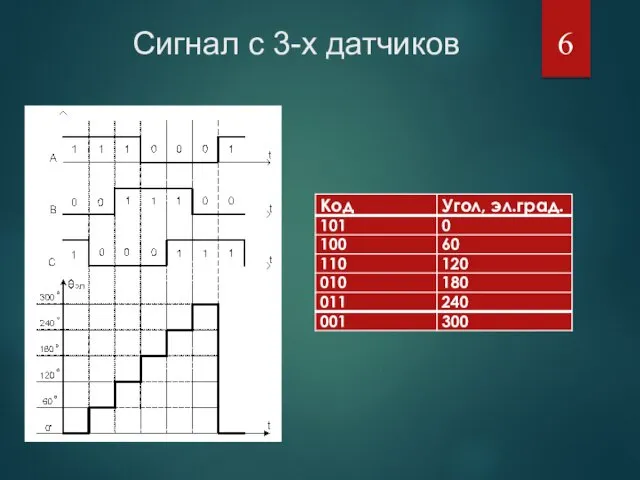
Сигнал с 3-х датчиков
Сигнал с 3-х датчиков
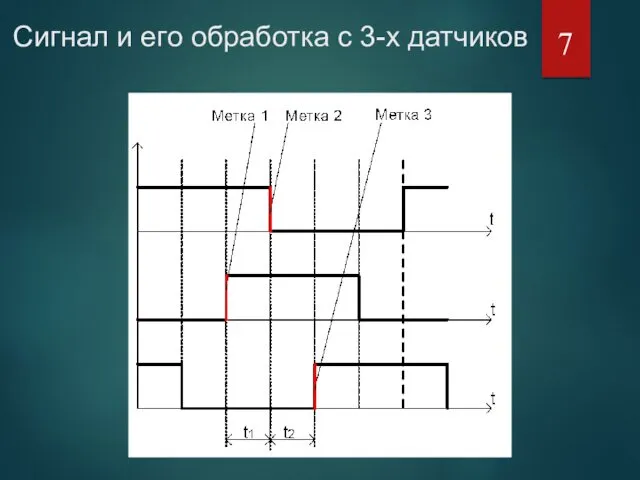
Сигнал и его обработка с 3-х датчиков
Сигнал и его обработка с 3-х датчиков
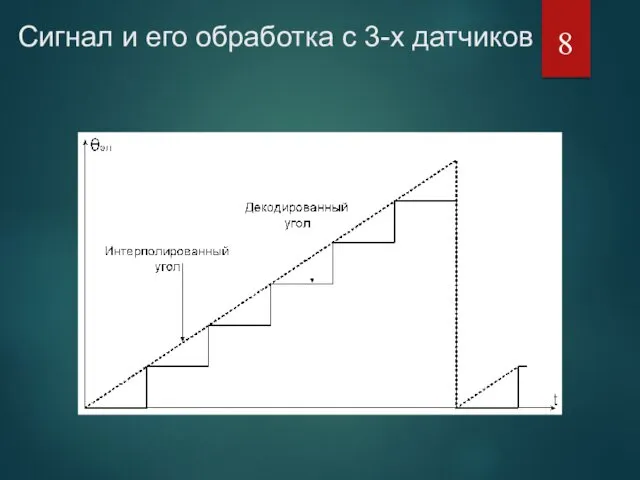
Сигнал и его обработка с 3-х датчиков
Сигнал и его обработка с 3-х датчиков
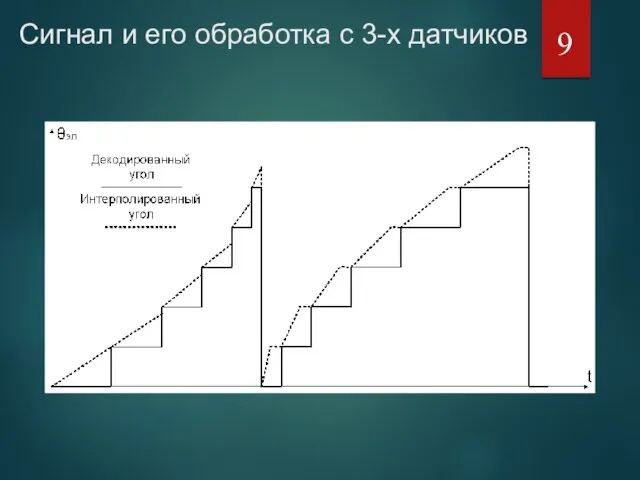
Сигнал и его обработка с 3-х датчиков
Сигнал и его обработка с 3-х датчиков

РАСЧЕТ СКОРОСТИ
РАСЧЕТ СКОРОСТИ

РАСЧЕТ СКОРОСТИ
РАСЧЕТ СКОРОСТИ
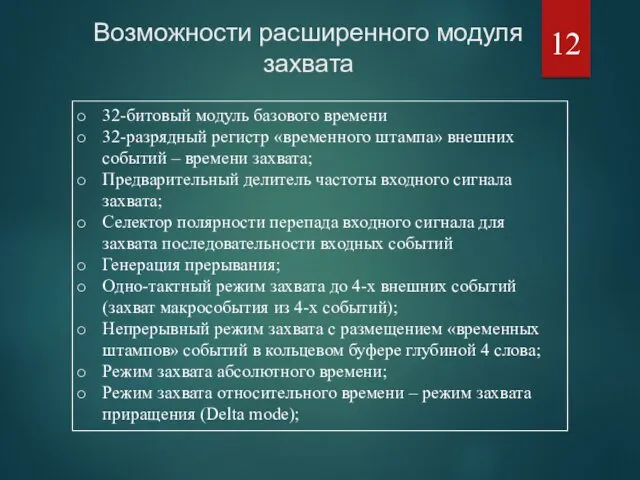
32-битовый модуль базового времени
32-разрядный регистр «временного штампа» внешних событий – времени
32-битовый модуль базового времени
32-разрядный регистр «временного штампа» внешних событий – времени
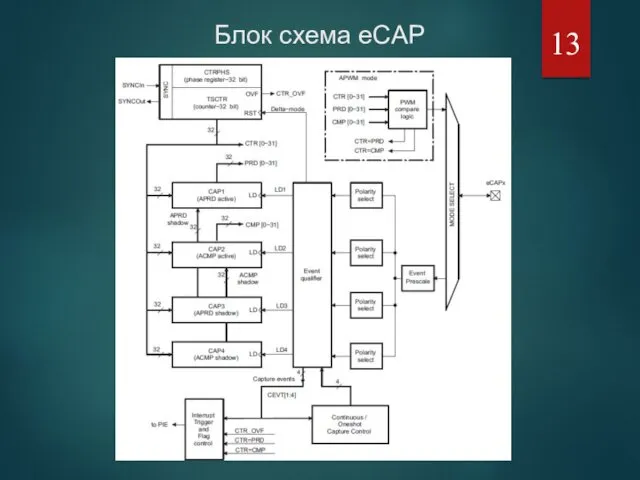
Блок схема eCAP
Блок схема eCAP
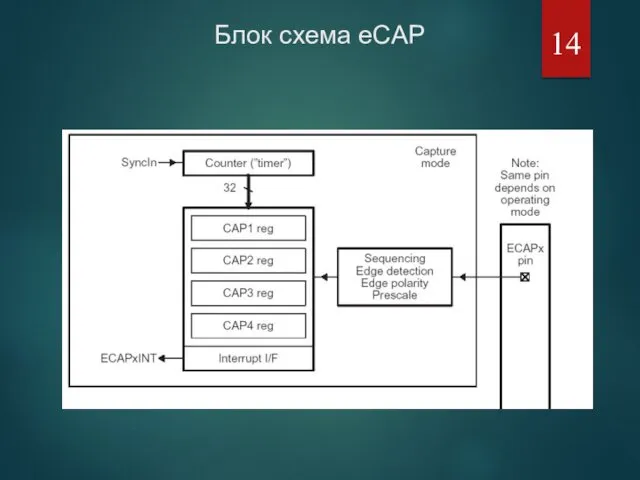
Блок схема eCAP
Блок схема eCAP
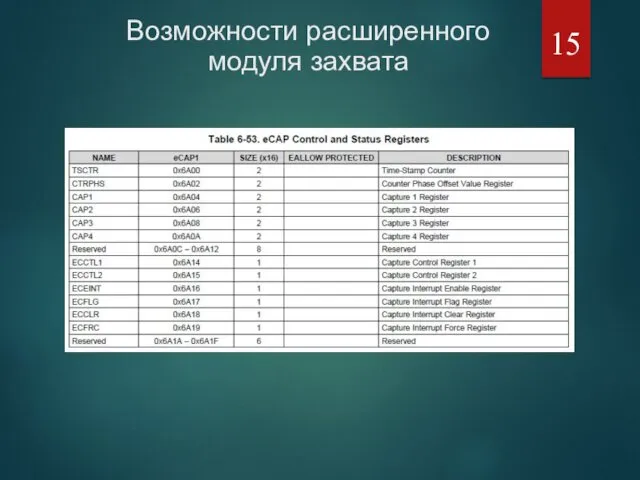
Возможности расширенного модуля захвата
Возможности расширенного модуля захвата
Предварительный делитель событий (Event Prescaler)
Входной сигнал, подлежащий захвату, и представляющий собой
Предварительный делитель событий (Event Prescaler)
Входной сигнал, подлежащий захвату, и представляющий собой
Селектор полярности перепада и квалификатор событий
Используются четыре независящих друг от друга
Селектор полярности перепада и квалификатор событий
Используются четыре независящих друг от друга
Возможности расширенного модуля захвата
Возможности расширенного модуля захвата
Режим одно-кратного и непрерывного захвата событий
Счетчик событий является 2-битовым и инкрементируется
Режим одно-кратного и непрерывного захвата событий
Счетчик событий является 2-битовым и инкрементируется
32-разрядный счетчик и управление фазой
Этот счетчик обеспечивает временную базу для модуля
32-разрядный счетчик и управление фазой
Этот счетчик обеспечивает временную базу для модуля
Регистры «временных штампов» CAP1-CAP4
32-разрядные регистры «временных штампов» захваченных внешних событий CAP1-CAP4
Регистры «временных штампов» CAP1-CAP4
32-разрядные регистры «временных штампов» захваченных внешних событий CAP1-CAP4
Управление прерываниями
Прерывания могут генерироваться по:
любому из захваченных внешних событий
по переполнению базового
Управление прерываниями
Прерывания могут генерироваться по:
любому из захваченных внешних событий
по переполнению базового
Квадратурные (оптические) датчики положения и скорости.
Применение модуля обработки квадратурного сигнала eQEP.
Квадратурные (оптические) датчики положения и скорости.
Применение модуля обработки квадратурного сигнала eQEP.
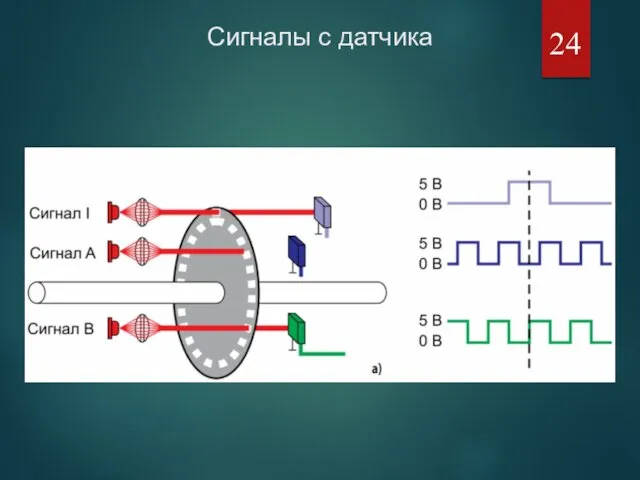
Сигналы с датчика
Сигналы с датчика

Сигналы с датчика
Сигналы с датчика
Сигналы с датчика
Сигналы с датчика
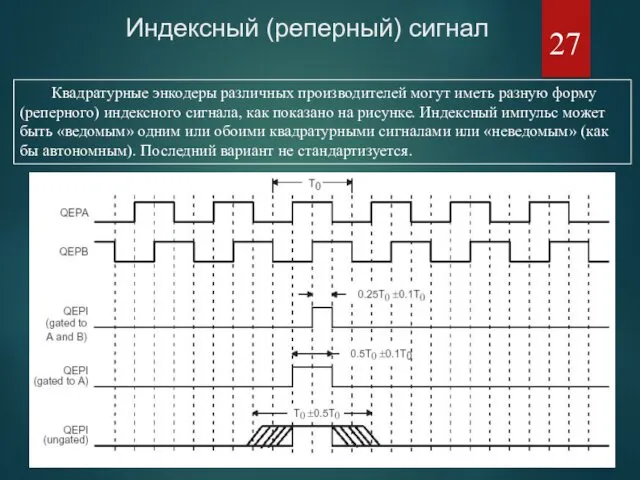
Квадратурные энкодеры различных производителей могут иметь разную форму (реперного) индексного сигнала,
Квадратурные энкодеры различных производителей могут иметь разную форму (реперного) индексного сигнала,
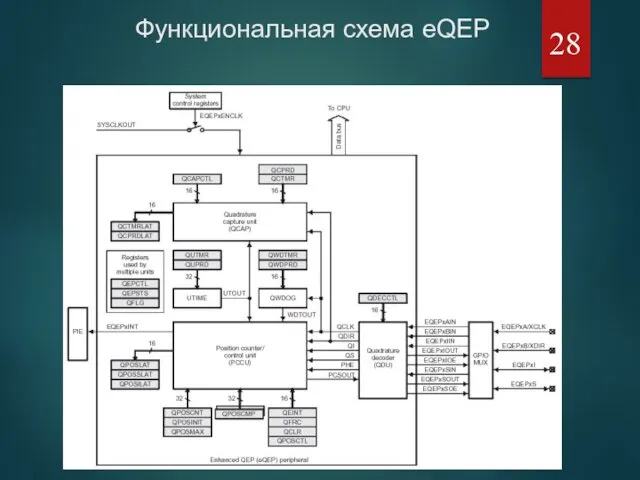
Функциональная схема eQEP
Функциональная схема eQEP
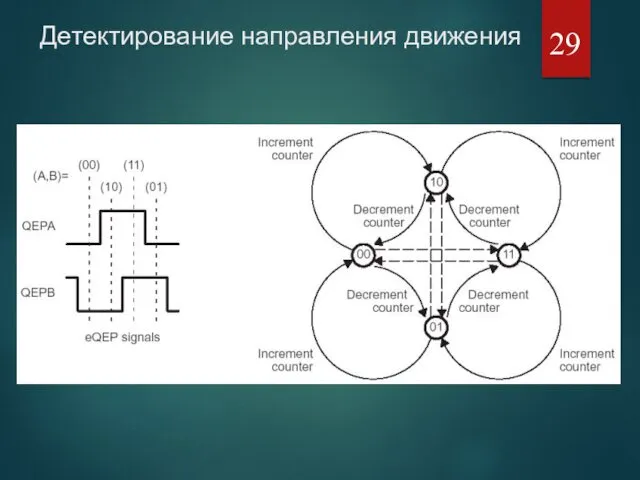
Детектирование направления движения
Детектирование направления движения
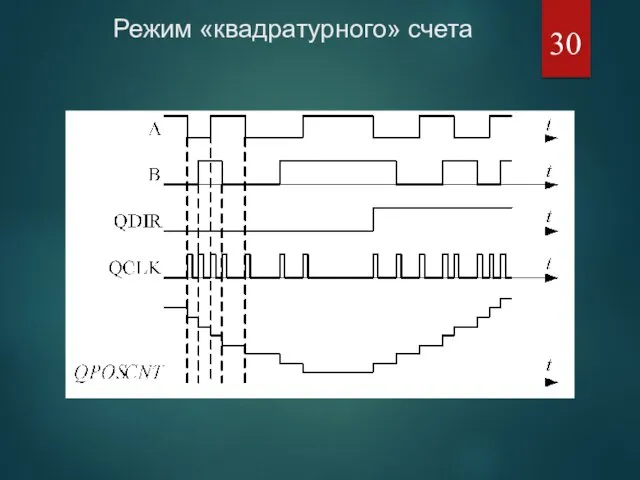
Режим «квадратурного» счета
Режим «квадратурного» счета
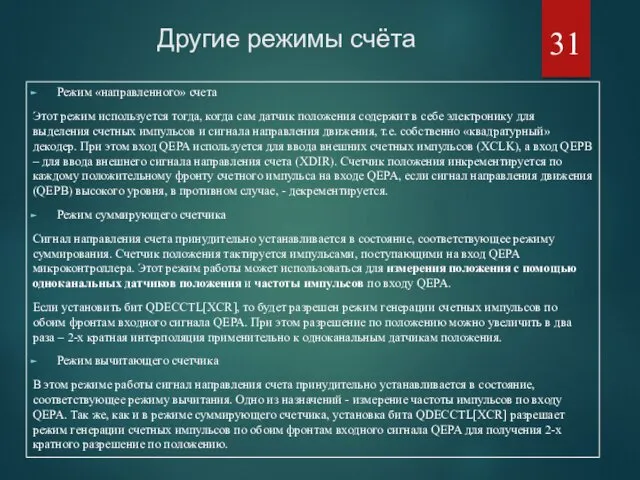
Другие режимы счёта
Режим «направленного» счета
Этот режим используется тогда, когда сам датчик
Другие режимы счёта
Режим «направленного» счета
Этот режим используется тогда, когда сам датчик
Режимы работы счётчик положения
Сброс счетчика положения по индексному (реперному) событию (Index
Режимы работы счётчик положения
Сброс счетчика положения по индексному (реперному) событию (Index
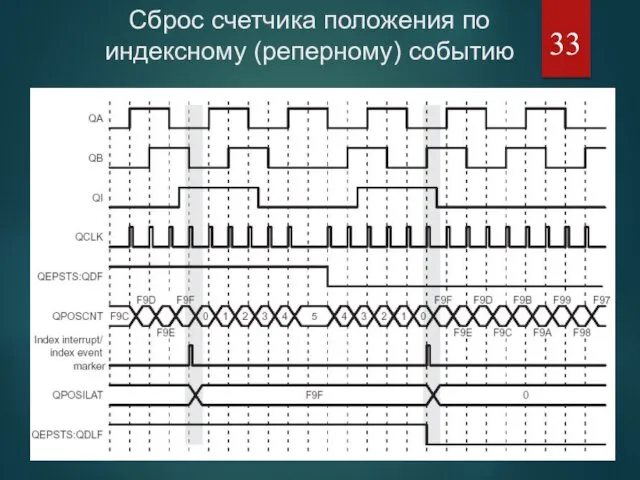
Сброс счетчика положения по индексному (реперному) событию
Сброс счетчика положения по индексному (реперному) событию
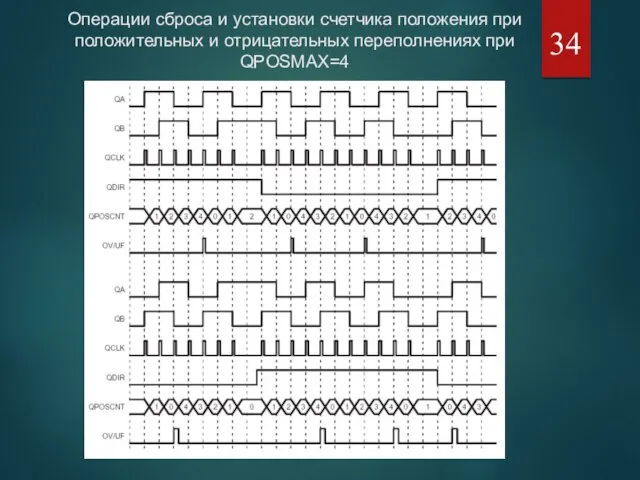
Операции сброса и установки счетчика положения при положительных и отрицательных переполнениях
Операции сброса и установки счетчика положения при положительных и отрицательных переполнениях
Расчёт скорости и положения
На аппаратном уровне поддерживаются два алгоритма оценки скорости:
Для
Расчёт скорости и положения
На аппаратном уровне поддерживаются два алгоритма оценки скорости:
Для
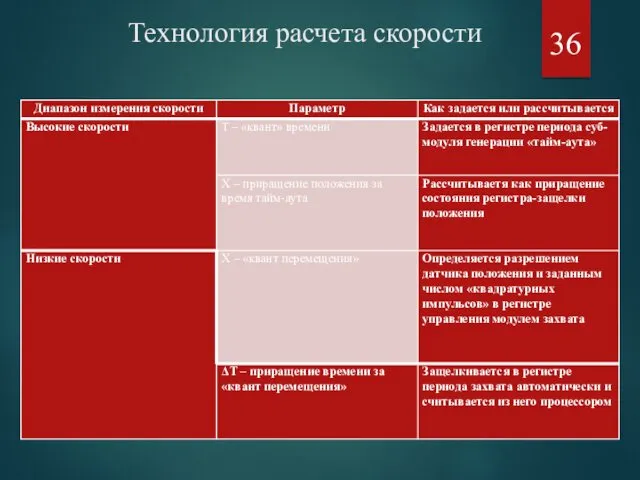
Технология расчета скорости
Технология расчета скорости
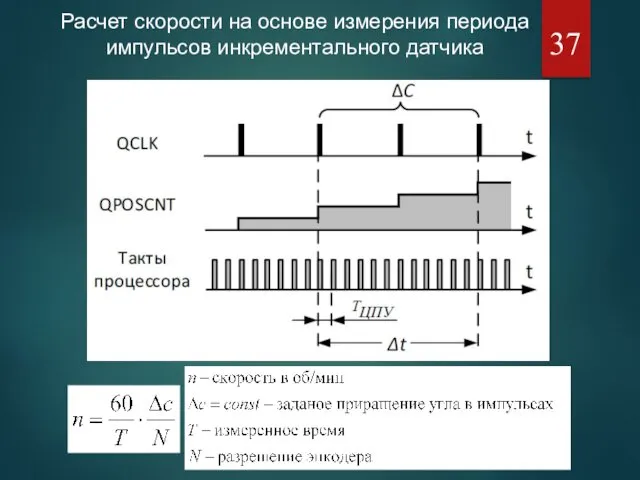
Расчет скорости на основе измерения периода импульсов инкрементального датчика
Расчет скорости на основе измерения периода импульсов инкрементального датчика

Недостатки метода расчета скорости на основе измерения периода импульсов
Пусть ,
тогда относительная
Недостатки метода расчета скорости на основе измерения периода импульсов
Пусть ,
тогда относительная
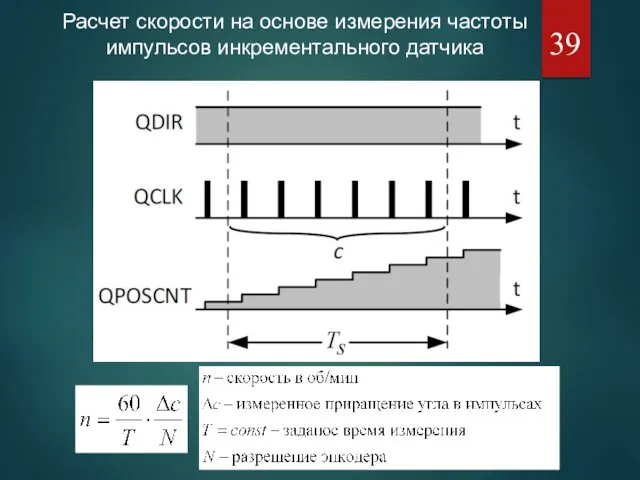
Расчет скорости на основе измерения частоты импульсов инкрементального датчика
Расчет скорости на основе измерения частоты импульсов инкрементального датчика
Пусть ,
тогда относительная и абсолютная ошибки равны:
Недостатки метода расчета скорости
Пусть ,
тогда относительная и абсолютная ошибки равны:
Недостатки метода расчета скорости
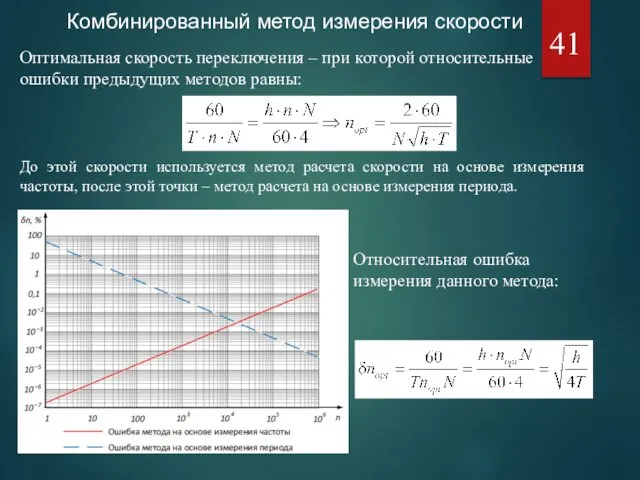
Комбинированный метод измерения скорости
Оптимальная скорость переключения – при которой относительные ошибки
Комбинированный метод измерения скорости
Оптимальная скорость переключения – при которой относительные ошибки

Синхронизированный метод постоянного времени измерения
С помощью энкодера QEP и модуля захвата
Синхронизированный метод постоянного времени измерения
С помощью энкодера QEP и модуля захвата
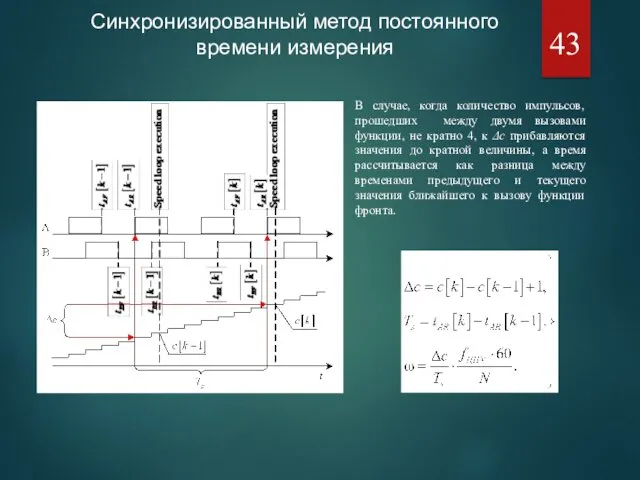
Синхронизированный метод постоянного времени измерения
Вызов Рег. Скор.
Вызов Рег. Скор.
В случае, когда
Синхронизированный метод постоянного времени измерения
Вызов Рег. Скор.
Вызов Рег. Скор.
В случае, когда
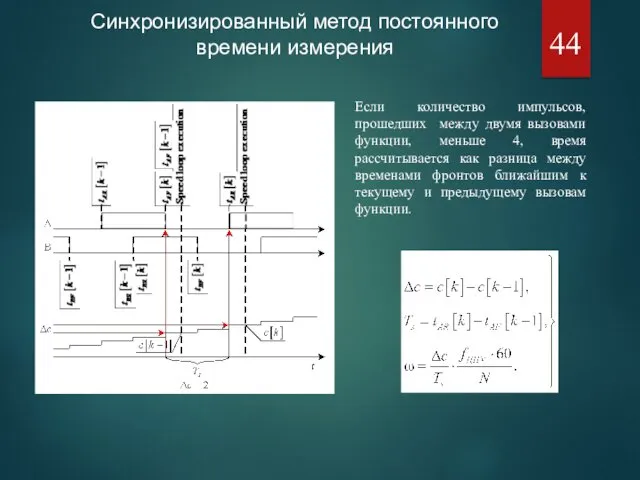
Синхронизированный метод постоянного времени измерения
Вызов Рег. Скор.
Вызов Рег. Скор.
Если количество импульсов,
Синхронизированный метод постоянного времени измерения
Вызов Рег. Скор.
Вызов Рег. Скор.
Если количество импульсов,
 Доклад
Доклад Акустика. Природа звука. Скорость звука. Эффект Доплера
Акустика. Природа звука. Скорость звука. Эффект Доплера Сан есім
Сан есім ДО Лекция 15 Ручной механизированный инструмент
ДО Лекция 15 Ручной механизированный инструмент Природа в опасности
Природа в опасности ЭРДУ аппарата Smart 1
ЭРДУ аппарата Smart 1 Итоговое сочинение (2018-2019 учебный год). Отцы и дети
Итоговое сочинение (2018-2019 учебный год). Отцы и дети Компонентная база электроники. Электроника курс лекций
Компонентная база электроники. Электроника курс лекций Поток энергии и круговорот веществ в пищевой цепи. Поток энергии в экосистеме. Экологическая пирамида, пирамида энергии
Поток энергии и круговорот веществ в пищевой цепи. Поток энергии в экосистеме. Экологическая пирамида, пирамида энергии Древнегреческий театр. В театре Диониса
Древнегреческий театр. В театре Диониса Контрольно-измерительные материалы по геометрии для 8 класса
Контрольно-измерительные материалы по геометрии для 8 класса Решение задач по теории вероятности
Решение задач по теории вероятности Противоопухолевый иммунитет
Противоопухолевый иммунитет Вагоны класса люкс
Вагоны класса люкс Курская область
Курская область Юридические лица и их классификация
Юридические лица и их классификация 9_Презентация_к_уроку_Галогены_и_их_соединения
9_Презентация_к_уроку_Галогены_и_их_соединения Геймдизайнер компании Vizor games
Геймдизайнер компании Vizor games Презентация к классному часу Все мы разные во 2 классе
Презентация к классному часу Все мы разные во 2 классе 2 Путешествие в страну Грамота (звуки П, Пь. Буква П).
2 Путешествие в страну Грамота (звуки П, Пь. Буква П). Профессия машинист локомотива
Профессия машинист локомотива Владимир Владимирович Маяковский 1893-1930
Владимир Владимирович Маяковский 1893-1930 Презентация программы дополнительного образования детей 1 класса
Презентация программы дополнительного образования детей 1 класса Помилки в роботі з пацієнтами з стресовими та посттравматичними стресовими розладами
Помилки в роботі з пацієнтами з стресовими та посттравматичними стресовими розладами Декупаж
Декупаж Карамель. Формування споживних властивостей карамелі. Класифікація і формування асортименту карамелі
Карамель. Формування споживних властивостей карамелі. Класифікація і формування асортименту карамелі Уравнение прямой на плоскости
Уравнение прямой на плоскости Дополнительные образовательные программы
Дополнительные образовательные программы