Перспективные структуры современных цифровых электроприводов с двигателями переменного тока (АД, СД, ВД, ВИД) презентация
- Перспективные структуры современных цифровых электроприводов с двигателями переменного тока (АД, СД, ВД, ВИД)

Содержание
- 2. Перспективные структуры. Типовые задачи цифрового управления. Модульный подход к построению цифровых систем управления электроприводами Концепция прямого
- 3. Модульный подход к построению цифровых систем управления
- 4. Модульный подход к построению цифровых систем управления Интеграция МПС в силовой преобразователь – встроенная цифровая система
- 5. Концепция прямого цифрового управления: было
- 6. Концепция прямого цифрового управления: стало
- 7. Концепция прямого цифрового управления: стало Интеграция специализированной периферии для управления двигателями на кристалл микроконтроллера – специализированные
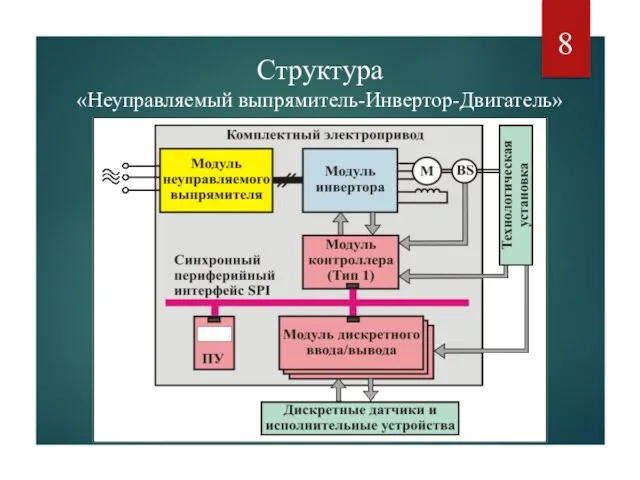
- 8. Структура «Неуправляемый выпрямитель-Инвертор-Двигатель»
- 9. Структура «Неуправляемый выпрямитель-Инвертор-Двигатель» Типовая структура асинхронных частотно-регулируемых приводов общепромышленных механизмов, насосов, вентиляторов. Интеграция в систему управления
- 10. Структура «Активный выпрямитель-Инвертор-Двигатель»
- 11. Структура «Активный выпрямитель-Инвертор-Двигатель» Возможность рекуперации энергии торможения привода в сеть (грузовые лифты, шахтные подъемники, маховиковые накопители
- 12. Структура «Преобразователь DC/DC-Инвертор-Двигатель»
- 13. Структура много-осевого электропривода с общим звеном постоянного тока
- 14. Структура многосекционного вентильно-индукторного электропривода
- 15. Какие вычислительные задачи решает микроконтроллер для векторного управления электродвигателем?
- 16. Перспективная элементная база для разработки серий цифровых систем управления электроприводами. Примеры отечественных разработок
- 17. Большинство приложений требуют эффективных систем управления Сегодня приложений в области управления в 5 раз больше, чем
- 18. Специализированные микроконтроллеры Счетчики Таймеры Каналы сравнения Каналы захвата Процессоры событий ШИМ-генераторы Квадратурные декодеры Интерфейсы передачи данных
- 19. Тенденции развития встроенных систем управления на примере МК Texas Instruments
- 20. Микроконтроллер K1921BK01T ARM 100 MHz (НИИЭТ Воронеж)
- 21. Состав МК фирмы TI TMS320F28035
- 22. Состав К1921ВК01Т Огромное количество периферии с ядром Cortex-M4F 100МГц Функционально годен для любых задач электропривода и
- 23. Сравнение современных МК
- 24. Примеры разработок серий модульных микроконтроллерных систем управления для перспективных электроприводов
- 25. Архитектура универсального контроллера привода
- 26. Texas Instruments TMS320F2810 С28 150МГц НИИЭТ К1921ВК01Т ARM 100МГц Примеры современных микроконтроллеров
- 28. Скачать презентацию
Перспективные структуры.
Типовые задачи цифрового управления.
Модульный подход к построению цифровых систем
Перспективные структуры.
Типовые задачи цифрового управления.
Модульный подход к построению цифровых систем

Модульный подход к построению
цифровых систем управления
Модульный подход к построению
цифровых систем управления
Модульный подход к построению
цифровых систем управления
Интеграция МПС в силовой преобразователь –
Модульный подход к построению
цифровых систем управления
Интеграция МПС в силовой преобразователь –

Концепция прямого цифрового управления: было
Концепция прямого цифрового управления: было

Концепция прямого цифрового управления: стало
Концепция прямого цифрового управления: стало
Концепция прямого цифрового
управления: стало
Интеграция специализированной периферии для управления двигателями на кристалл
Концепция прямого цифрового
управления: стало
Интеграция специализированной периферии для управления двигателями на кристалл
Структура
«Неуправляемый выпрямитель-Инвертор-Двигатель»
Структура
«Неуправляемый выпрямитель-Инвертор-Двигатель»
Структура
«Неуправляемый выпрямитель-Инвертор-Двигатель»
Типовая структура асинхронных частотно-регулируемых приводов общепромышленных механизмов, насосов, вентиляторов.
Структура
«Неуправляемый выпрямитель-Инвертор-Двигатель»
Типовая структура асинхронных частотно-регулируемых приводов общепромышленных механизмов, насосов, вентиляторов.

Структура «Активный выпрямитель-Инвертор-Двигатель»
Структура «Активный выпрямитель-Инвертор-Двигатель»
Структура «Активный выпрямитель-Инвертор-Двигатель»
Возможность рекуперации энергии торможения привода в сеть (грузовые лифты,
Структура «Активный выпрямитель-Инвертор-Двигатель»
Возможность рекуперации энергии торможения привода в сеть (грузовые лифты,

Структура «Преобразователь DC/DC-Инвертор-Двигатель»
Структура «Преобразователь DC/DC-Инвертор-Двигатель»

Структура много-осевого электропривода с общим звеном постоянного тока
Структура много-осевого электропривода с общим звеном постоянного тока
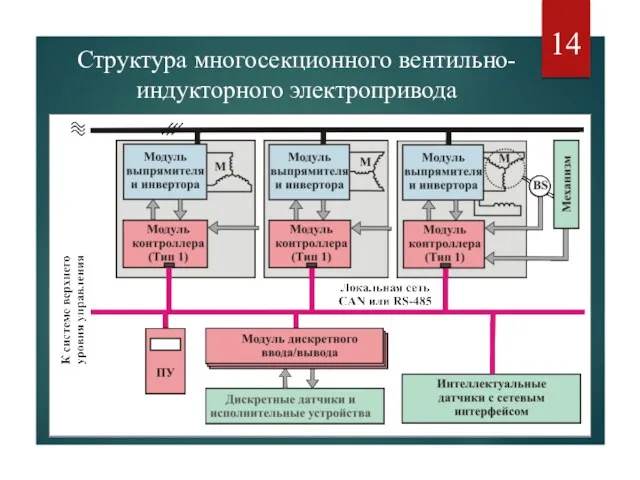
Структура многосекционного вентильно-индукторного электропривода
Структура многосекционного вентильно-индукторного электропривода

Какие вычислительные задачи решает микроконтроллер
для векторного управления электродвигателем?
Какие вычислительные задачи решает микроконтроллер
для векторного управления электродвигателем?
Перспективная элементная база для разработки серий цифровых систем управления электроприводами. Примеры
Перспективная элементная база для разработки серий цифровых систем управления электроприводами. Примеры

Большинство приложений требуют
эффективных систем управления
Сегодня приложений в области управления в 5
Большинство приложений требуют
эффективных систем управления
Сегодня приложений в области управления в 5
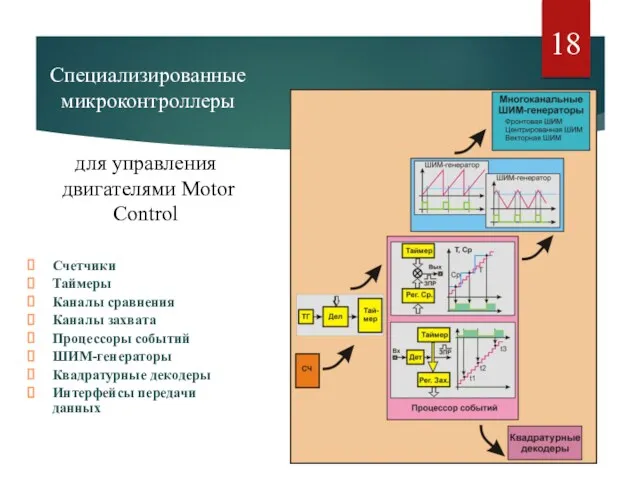
Специализированные микроконтроллеры
Счетчики
Таймеры
Каналы сравнения
Каналы захвата
Процессоры событий
ШИМ-генераторы
Квадратурные декодеры
Интерфейсы передачи данных
для управления
двигателями
Специализированные микроконтроллеры
Счетчики
Таймеры
Каналы сравнения
Каналы захвата
Процессоры событий
ШИМ-генераторы
Квадратурные декодеры
Интерфейсы передачи данных
для управления двигателями
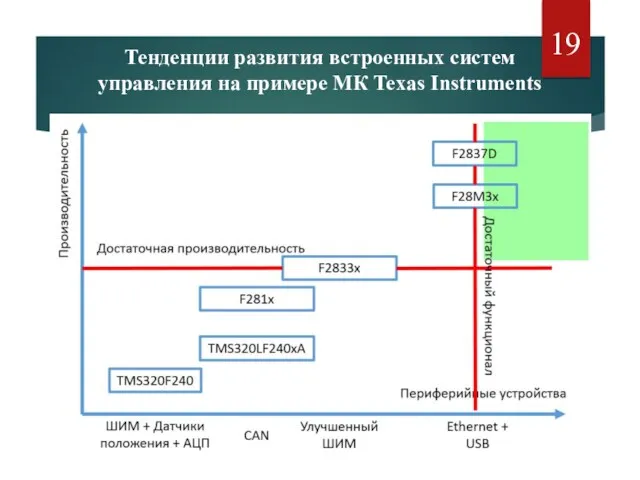
Тенденции развития встроенных систем
управления на примере МК Texas Instruments
Тенденции развития встроенных систем
управления на примере МК Texas Instruments
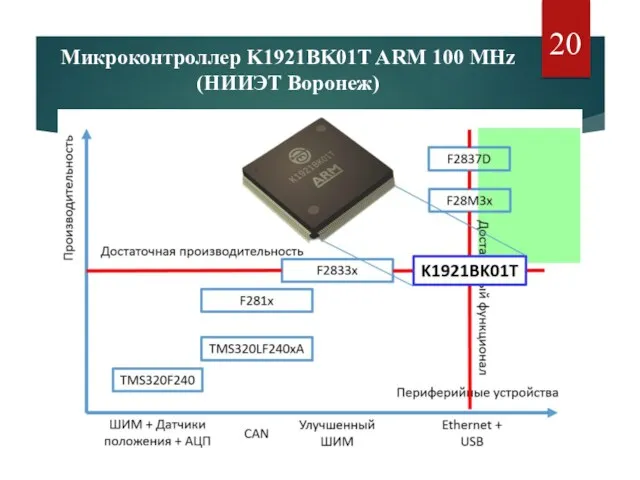
Микроконтроллер K1921BK01T ARM 100 MHz
(НИИЭТ Воронеж)
Микроконтроллер K1921BK01T ARM 100 MHz
(НИИЭТ Воронеж)
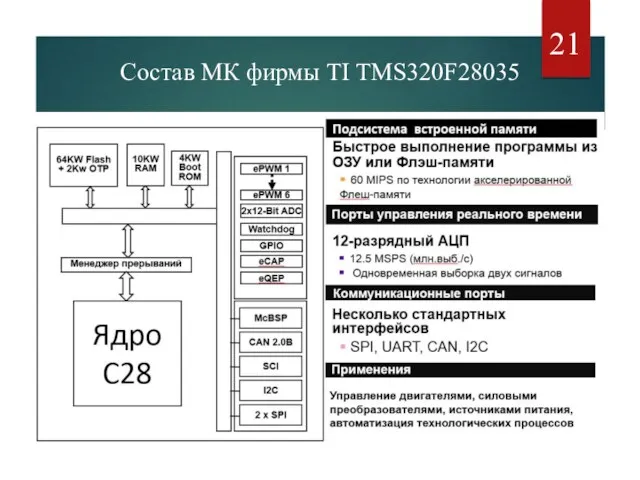
Состав МК фирмы TI TMS320F28035
Состав МК фирмы TI TMS320F28035
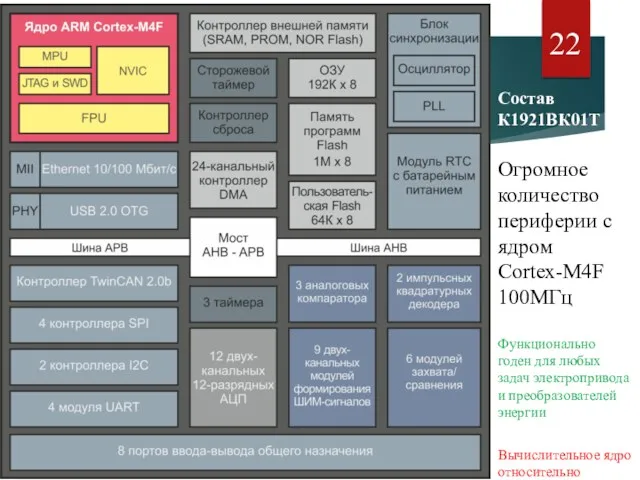
Состав К1921ВК01Т
Огромное количество периферии с ядром Cortex-M4F 100МГц
Функционально годен для любых
Состав К1921ВК01Т
Огромное количество периферии с ядром Cortex-M4F 100МГц
Функционально годен для любых

Сравнение современных МК
Сравнение современных МК
Примеры разработок серий модульных микроконтроллерных систем управления для перспективных электроприводов
Примеры разработок серий модульных микроконтроллерных систем управления для перспективных электроприводов

Архитектура универсального
контроллера привода
Архитектура универсального
контроллера привода

Texas Instruments
TMS320F2810 С28 150МГц
НИИЭТ
К1921ВК01Т ARM 100МГц
Примеры современных
Texas Instruments
TMS320F2810 С28 150МГц
НИИЭТ
К1921ВК01Т ARM 100МГц
Примеры современных
 Своя игра
Своя игра Асортимент виробів з бісквітного тіста, та їх реалізація в підприємствах ресторанного господарства
Асортимент виробів з бісквітного тіста, та їх реалізація в підприємствах ресторанного господарства Лечебно-профилактическое питание
Лечебно-профилактическое питание Схемы газопроводов и газового оборудования газорегуляторных пунктов
Схемы газопроводов и газового оборудования газорегуляторных пунктов Морфологический анализ слов. Части речи
Морфологический анализ слов. Части речи Виды симметрии
Виды симметрии Операционная технология возделывания и уборки гречихи с разработкой операции по основной обработке почвы
Операционная технология возделывания и уборки гречихи с разработкой операции по основной обработке почвы Заболевания сердечно-сосудистой системы
Заболевания сердечно-сосудистой системы Лирика
Лирика История развития картографии
История развития картографии организация предметно - развивающей среды в группе раннего возраста
организация предметно - развивающей среды в группе раннего возраста Педагогический проект
Педагогический проект Проектирование и технология ЭКБ
Проектирование и технология ЭКБ Золотые ворота в Киеве
Золотые ворота в Киеве Теоретические основы товароведения продовольственных товаров
Теоретические основы товароведения продовольственных товаров Климат африки
Климат африки Приготування страв до фуршету на 30 персон. Сервірування
Приготування страв до фуршету на 30 персон. Сервірування Ремонт пешеходного моста через р. Демьянку
Ремонт пешеходного моста через р. Демьянку Приготування концентрату квасного сусла
Приготування концентрату квасного сусла Робот STR-17 на платформе Аrduino
Робот STR-17 на платформе Аrduino Живопись эпохи Ренессанс
Живопись эпохи Ренессанс Основы стандартизации и сертификации
Основы стандартизации и сертификации Структура нормативной правовой базы системы военного образования
Структура нормативной правовой базы системы военного образования Федеральная государственная информационная система Росаккредитации
Федеральная государственная информационная система Росаккредитации Понятие - наука
Понятие - наука Основные положения теории транспортного потока
Основные положения теории транспортного потока Лавсан. Історія досліджень. Властисвості
Лавсан. Історія досліджень. Властисвості Воздействие организмов на земные оболочки
Воздействие организмов на земные оболочки