- Разработка системы удаленного присутствия на автономных объектах

Содержание
- 2. АКТУАЛЬНОСТЬ И ПРОБЛЕМЫ Актуальность: ~ Удаленное видеонаблюдение в реальном ремени ~ Непрерывно ведет визуальный обзор всего
- 3. ОБЪЕКТ И ПРЕДМЕТ ИССЛЕДОВАНИЯ Объект: ~ Mорское автономное надводное судно (МАНС) Предмет: ~ Система дистанционного видеонаблюдения
- 4. МАНС: . морское автономное надводное судно
- 5. Цель: Разработать систему удаленного присутствия на МАНС Задачи: Обзор систем связи Разработать модель системы видеонаблюдения и
- 6. СРАВНЕНИЕ СИСТЕМ СВЯЗИ
- 7. ВИДЕОКАМЕРЫ ХОРОШАЯ КАРТИНКА (УГОЛ ОБЗОРА, РАЗРЕШЕНИЕ) ЗАЩИЩЕННОСТЬ ОТ СОЛЕННОЙ ВОДЫ
- 8. КУПОЛЬНАЯ IP-КАМЕРА ВИДЕОНАБЛЮДЕНИЯ РЕЛИОН-Н-DOME-П-5МП Характеристики: Материал корпуса - нержавеющая сталь ; температурный диапазон, °С - –40
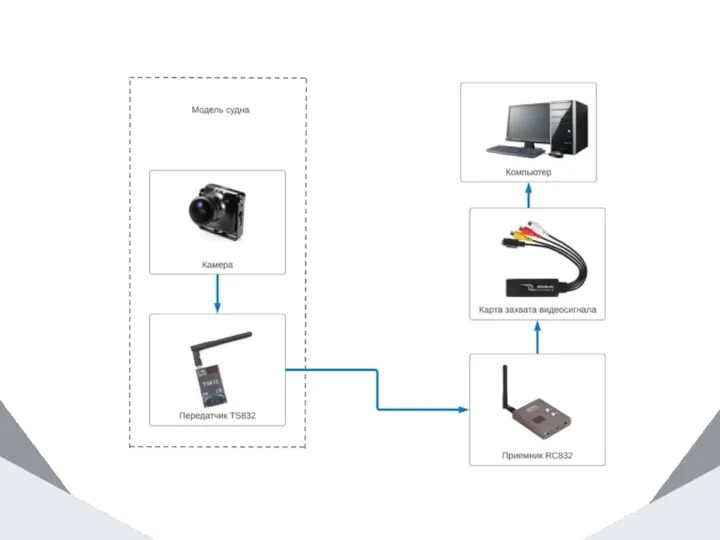
- 9. СХЕМА СИСТЕМЫ УДАЛЕННОГО ВИДЕОНАБЛЮДЕНИЯ
- 10. ЭКСПЕРИМЕНТАЛЬНА МОДЕЛЬ Длина: 210 см Ширина: 26 см Высота: 50 см
- 11. ЦЕЛЬ ЭКСПЕРИМЕНТА: Проверить работоспособность системы Задачи: Получить четкую картинку видео с макета судна, без задержек (с
- 12. Микроконтроллер Arduino Mega 2560 ЭЛЕМЕНТЫ Плата камеры видеонаблюдения Комплект Boscam 5,8 ГГц TS832 RC832 Карта захвата
- 14. 17,5 см камера
- 15. Программа: RCC (Robot Control Center) РЕЗУЛЬТАТ
- 16. Цель эксперимента: 1. Определить положение в реальном времени Задачи: 1. Получить точное положение с минимальным отклонением
- 17. Микроконтроллер Arduino Mega 2560 ЭЛЕМЕНТЫ Спиральная антенна GNSS TOP107 Комплект радиомодулей GPS приёмник GY-NEO7M
- 19. Программа: U-Center
- 21. Скачать презентацию

АКТУАЛЬНОСТЬ И ПРОБЛЕМЫ
Актуальность:
~ Удаленное видеонаблюдение в реальном ремени
~ Непрерывно ведет визуальный
АКТУАЛЬНОСТЬ И ПРОБЛЕМЫ
Актуальность:
~ Удаленное видеонаблюдение в реальном ремени
~ Непрерывно ведет визуальный
ОБЪЕКТ И ПРЕДМЕТ ИССЛЕДОВАНИЯ
Объект:
~ Mорское автономное надводное судно
(МАНС)
Предмет:
~ Система дистанционного видеонаблюдения
ОБЪЕКТ И ПРЕДМЕТ ИССЛЕДОВАНИЯ
Объект:
~ Mорское автономное надводное судно
(МАНС)
Предмет:
~ Система дистанционного видеонаблюдения

МАНС:
.
морское автономное надводное судно
МАНС:
.
морское автономное надводное судно
Цель: Разработать систему удаленного присутствия на МАНС
Задачи:
Обзор систем связи
Разработать модель
Цель: Разработать систему удаленного присутствия на МАНС
Задачи:
Обзор систем связи
Разработать модель

СРАВНЕНИЕ СИСТЕМ СВЯЗИ
СРАВНЕНИЕ СИСТЕМ СВЯЗИ
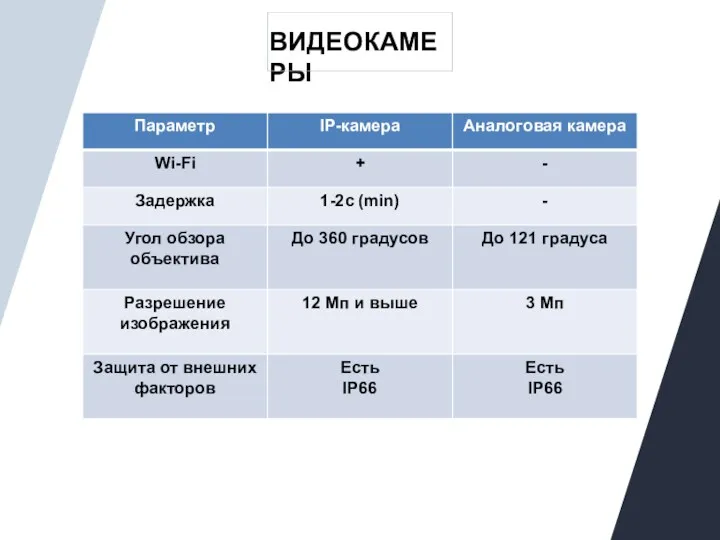
ВИДЕОКАМЕРЫ
ХОРОШАЯ КАРТИНКА (УГОЛ ОБЗОРА, РАЗРЕШЕНИЕ)
ЗАЩИЩЕННОСТЬ ОТ СОЛЕННОЙ ВОДЫ
ВИДЕОКАМЕРЫ
ХОРОШАЯ КАРТИНКА (УГОЛ ОБЗОРА, РАЗРЕШЕНИЕ)
ЗАЩИЩЕННОСТЬ ОТ СОЛЕННОЙ ВОДЫ

КУПОЛЬНАЯ IP-КАМЕРА ВИДЕОНАБЛЮДЕНИЯ РЕЛИОН-Н-DOME-П-5МП
Характеристики:
Материал корпуса - нержавеющая сталь ;
температурный диапазон, °С
КУПОЛЬНАЯ IP-КАМЕРА ВИДЕОНАБЛЮДЕНИЯ РЕЛИОН-Н-DOME-П-5МП
Характеристики:
Материал корпуса - нержавеющая сталь ;
температурный диапазон, °С

СХЕМА СИСТЕМЫ УДАЛЕННОГО ВИДЕОНАБЛЮДЕНИЯ
СХЕМА СИСТЕМЫ УДАЛЕННОГО ВИДЕОНАБЛЮДЕНИЯ
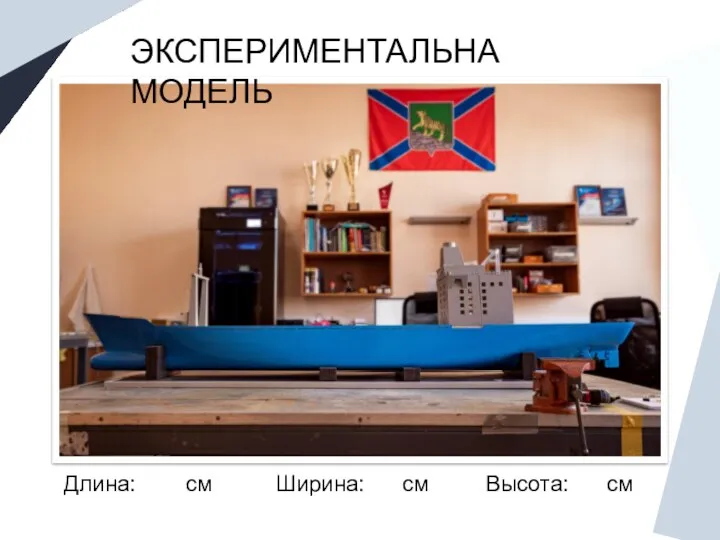
ЭКСПЕРИМЕНТАЛЬНА МОДЕЛЬ
Длина: 210 см
Ширина: 26 см
Высота: 50 см
ЭКСПЕРИМЕНТАЛЬНА МОДЕЛЬ
Длина: 210 см
Ширина: 26 см
Высота: 50 см
ЦЕЛЬ ЭКСПЕРИМЕНТА:
Проверить работоспособность системы
Задачи:
Получить четкую картинку видео с макета судна,
без
Проверить работоспособность системы
Задачи:
Получить четкую картинку видео с макета судна,
без

Микроконтроллер Arduino Mega 2560
ЭЛЕМЕНТЫ
Плата камеры видеонаблюдения
Комплект Boscam 5,8 ГГц
TS832
RC832
Карта захвата видео
Микроконтроллер Arduino Mega 2560
ЭЛЕМЕНТЫ
Плата камеры видеонаблюдения
Комплект Boscam 5,8 ГГц
TS832
RC832
Карта захвата видео
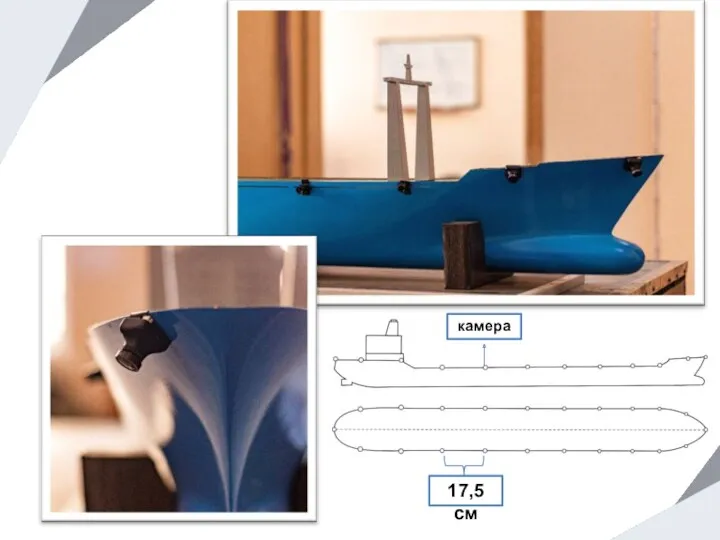
17,5 см
камера
17,5 см
камера
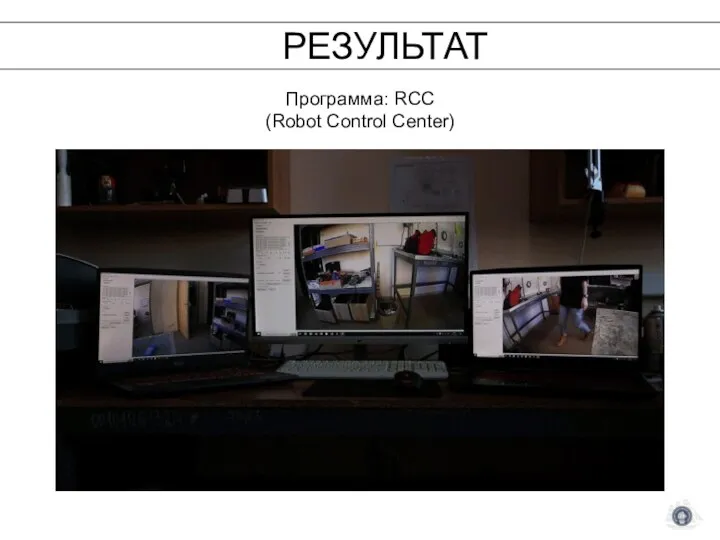
Программа: RCC
(Robot Control Center)
РЕЗУЛЬТАТ
Программа: RCC
(Robot Control Center)
РЕЗУЛЬТАТ
Цель эксперимента:
1. Определить положение в реальном времени
Задачи:
1. Получить точное положение
1. Определить положение в реальном времени
Задачи:
1. Получить точное положение

Микроконтроллер Arduino Mega 2560
ЭЛЕМЕНТЫ
Спиральная антенна GNSS TOP107
Комплект радиомодулей
GPS приёмник GY-NEO7M
Микроконтроллер Arduino Mega 2560
ЭЛЕМЕНТЫ
Спиральная антенна GNSS TOP107
Комплект радиомодулей
GPS приёмник GY-NEO7M


Программа: U-Center
Программа: U-Center
 Презентация по теме Рельеф Ульяновской области
Презентация по теме Рельеф Ульяновской области Пирамида
Пирамида Оснастка для снятия , наведения запорной арматуры и выполнения других операций
Оснастка для снятия , наведения запорной арматуры и выполнения других операций Терроризм. Черты терроризма
Терроризм. Черты терроризма Iшек өтімсіздігі
Iшек өтімсіздігі Александр Сергеевич Пушкин Капитанская дочка. 8 класс
Александр Сергеевич Пушкин Капитанская дочка. 8 класс tema2_3
tema2_3 Розы из бумаги
Розы из бумаги Историко-культурные предпосылки создания психоанализа
Историко-культурные предпосылки создания психоанализа Emergencies in Gynecology
Emergencies in Gynecology Аварии на химически опасных объектах и химическое заражение окружающей среды
Аварии на химически опасных объектах и химическое заражение окружающей среды Причины перерастания пожаров в крупные
Причины перерастания пожаров в крупные Гражданская война 1918 и интервенция 1918-1921
Гражданская война 1918 и интервенция 1918-1921 О раннем обучении английскому языку через интеграцию образовательных областей Физкультура и Коммуникация
О раннем обучении английскому языку через интеграцию образовательных областей Физкультура и Коммуникация Религии мира 2
Религии мира 2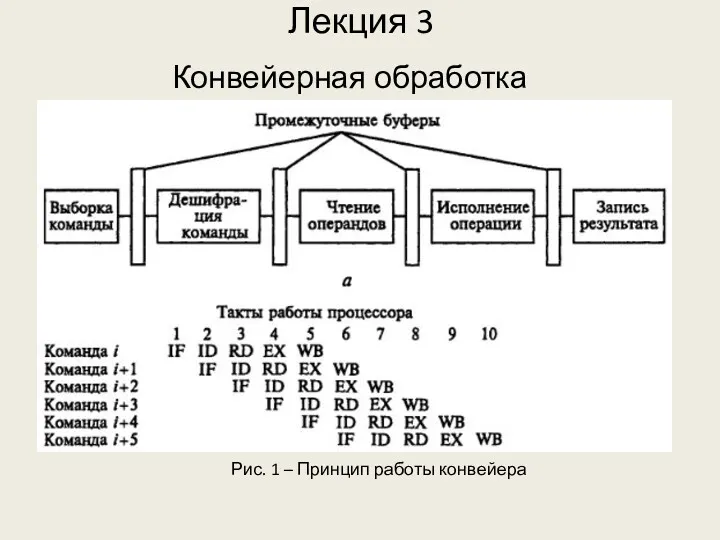 Конвейерная обработка
Конвейерная обработка Даниил Гранин
Даниил Гранин Птеродактиль
Птеродактиль С Новым Годом
С Новым Годом О. Генри. Дары волхвов
О. Генри. Дары волхвов Возникновение христианства
Возникновение христианства Обеспечение безопасности информации, сопровождающейся разработкой программного продукта для криптографической защиты
Обеспечение безопасности информации, сопровождающейся разработкой программного продукта для криптографической защиты Грибы-паразиты
Грибы-паразиты Fintegra - Регистрация инвестиционной платформы
Fintegra - Регистрация инвестиционной платформы Классификация правовых систем по Р. Давиду
Классификация правовых систем по Р. Давиду Презентация: Психологические особенности учеников 4 класса
Презентация: Психологические особенности учеников 4 класса Плата сбора данных ЛА 2М3
Плата сбора данных ЛА 2М3 День Святого Валентина
День Святого Валентина