- Робототехника и средства конструирования. Виды движений роботов. Кинематические схемы

Содержание
- 2. Тема, цель и задачи урока Тема урока: Робототехника и средства конструирования. Виды движения. Кинематические схемы Цель
- 3. Актуализация знаний В нашей жизни – в школе, на работе, дома нас окружает огромное количество технических
- 4. Что такое робот? Слово «робот» было придумано чешским писателем Карелом Чапеком и его братом Йозефом и
- 5. История изобретения робота Оказывается, первые мысли к созданию роботов возникли еще до нашей эры: в середине
- 6. История изобретения робота Своим названием я хотел подчеркнуть способность моего робота отвечать на команды, поданные голосом
- 7. История изобретения робота Самыми первыми были изобретены именно промышленные роботы. В 1980 году в СССР создан
- 8. Виды роботов Роботы первого поколения (программные) - роботы с программным управлением, предназначенные для выполнения определенной, жестоко
- 9. Роботы первого, второго и третьего поколения
- 10. Виды роботов по области использования промышленные; бытовые; медицинские; обучающие; военные; охранные роботы; биороботы; роботы-игрушки; нанороботы; а
- 11. Подвиды современных роботов Промышленные роботы медицинские роботы
- 12. Роботы – Эко и танцующие
- 13. Подвиды современных роботов К настоящему времени роботы внедрены во многие сферы деятельности человека и продолжают дополнять
- 14. Сведения о робототехнике Робототехника – прикладная наука, занимающаяся разработкой автоматизированных технических систем. Робототехника опирается на такие
- 15. Сведения о робототехнике Кроме того, по мере развития и совершенствования робототехнических устройств возникла необходимость в мобильных
- 16. Законы робототехники При создании робототехники нужно руководствоваться правилами, по которым робот не может причинить вред человеку,
- 17. Техника безопасности при роботостроении 1. Запрещается использование инструментов и предметов, правила обращения, с которыми не изучены.
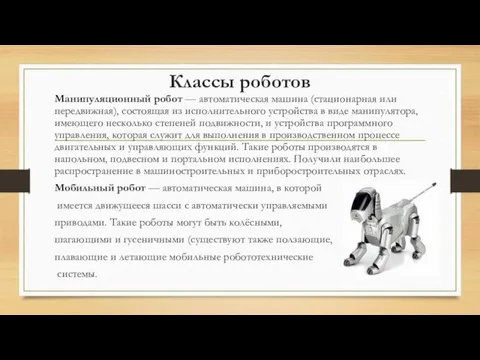
- 18. Классы роботов Манипуляционный робот — автоматическая машина (стационарная или передвижная), состоящая из исполнительного устройства в виде
- 19. Компоненты роботов Приводы — это «мышцы» роботов. В настоящее время самыми популярными двигателями в приводах являются
- 20. Компоненты роботов Пьезодвигатели: Современной альтернативой двигателям постоянного тока являются пьезодвигатели, также известные как ультразвуковые двигатели. Принцип
- 21. Компоненты роботов Воздушные мышцы: Воздушные мышцы — простое, но мощное устройство для обеспечения силы тяги. При
- 22. Способы перемещения Колёсные и гусеничные роботы Шагающие роботы Другие методы перемещения: Летающие роботы (в том числе
- 23. Системы управления Под управлением роботом понимается решение комплекса задач, связанных с адаптацией робота к кругу решаемых
- 24. Системы управления 3. Интерактивные: 3.1. автоматизированные (возможно чередование автоматических и биотехнических режимов); 3.2. супервизорные (автоматические системы,
- 25. Устройства передвижения роботов Устройство передвижения робота является исполнительной частью робота и конструктивно состоит из приводных устройств
- 26. Способы передвижения роботов Управление передвижением промышленных роботов выполняется по одному из следующих способов: 1) применение замкнутого
- 27. Первый способ передвижения Конструктивное выполнение устройства передвижения по первому способу имеет особенности, связанные с необходимостью получения
- 28. Второй способ передвижения При использовании второго способа выход робота в заданные позиции осуществляется с помощью одной
- 29. Третий способ передвижения Третий способ организации передвижения робота является комбинацией первого и второго способов, благодаря чему
- 30. Четвёртый способ передвижения Четвертый способ организации передвижения робота является по существу, модификацией второго способа, в части
- 31. Снабжение роботов устройствами передвижения существенно расширяет их технические возможности и обеспечивает 1) увеличение рабочей зоны, что
- 32. Кинематика механизмов. Кинематические пары: понятие, типы. Кинематические схемы механизмов, правила их чтения Механизмом называется система тел,
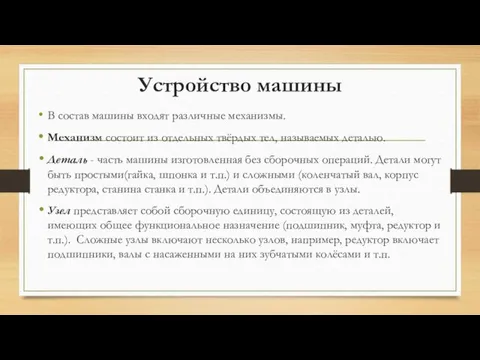
- 33. Устройство машины В состав машины входят различные механизмы. Механизм состоит из отдельных твёрдых тел, называемых деталью.
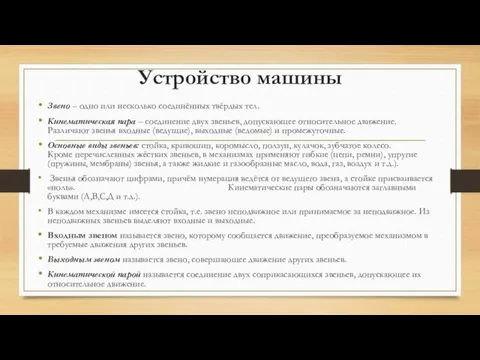
- 34. Устройство машины Звено – одно или несколько соединённых твёрдых тел. Кинематическая пара – соединение двух звеньев,
- 38. Практическая работа № 38: Изучение кинематических схем Задание: Изучить механизмы машины Познакомиться с понятиями кинематики
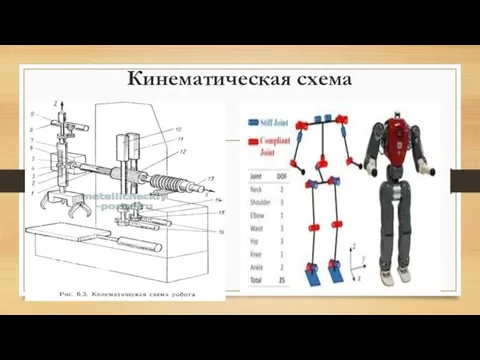
- 39. Кинематическая схема
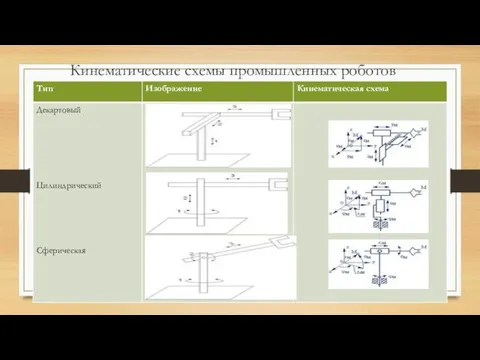
- 40. Кинематические схемы промышленных роботов
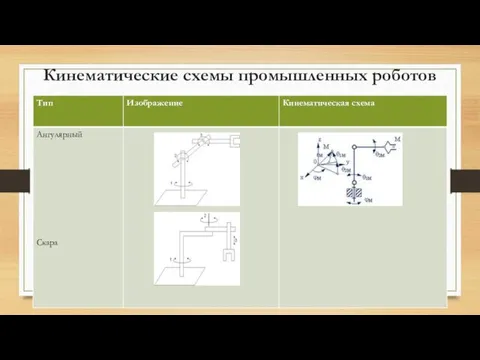
- 41. Кинематические схемы промышленных роботов
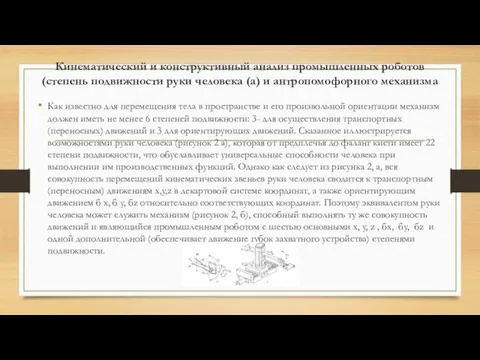
- 42. Кинематический и конструктивный анализ промышленных роботов (степень подвижности руки человека (а) и антропомофорного механизма Как известно
- 43. Кинематический и конструктивный анализ роботов Кинематическая структура ПР и их двигательные возможности определяются видом и последовательностью
- 44. Кинематический и конструктивный анализ роботов Как ориентирующие, так и транспортирующие движения должны выполняться с высокой точностью
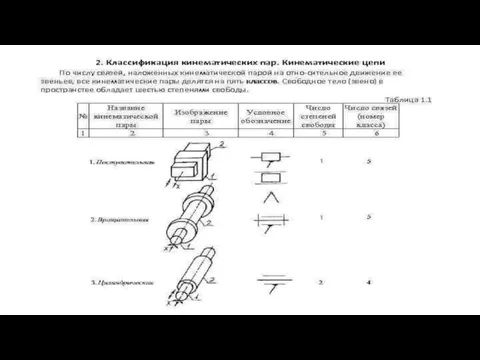
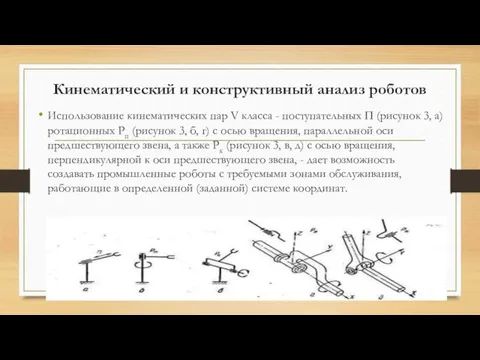
- 45. Кинематический и конструктивный анализ роботов Использование кинематических пар V класса - поступательных П (рисунок 3, а)
- 46. Кинематический и конструктивный анализ роботов Три поступательные пары, оси которых взаимно перпендикулярны, реализуют схему ПР, работающего
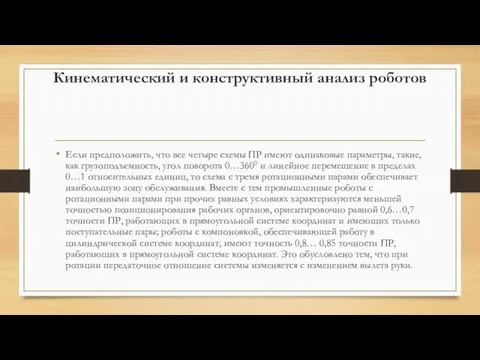
- 47. Кинематический и конструктивный анализ роботов Если предположить, что все четыре схемы ПР имеют одинаковые параметры, такие,
- 48. Геометрия зон обслуживания ПР, работающих в прямоугольной (а), цилиндрической (б), сферической (в), угловой (г) системах координат
- 49. В последнее время широко применяется схема ПР с горизонтальной «рукой» шарнирно соединенной конструкции (рисунок 5), зона
- 50. Рисунок 5 - Схема ПР с горизонтальной рукой шарнирно сочлененной конструкции (а) и геометрия его зоны
- 51. Геометрические характеристики степеней подвижности и способ установки ПР Каждый вариант кинематической структуры характеризуется конфигурацией зоны обслуживания
- 52. Итог урока Ответы на вопросы: Что такое робот? Виды роботов. Дать определение робототехники. Законы робототехники. Техника
- 54. Домашнее задание Конспект Проект робота
- 56. Скачать презентацию
Тема, цель и задачи урока
Тема урока: Робототехника и средства конструирования. Виды
Тема, цель и задачи урока
Тема урока: Робототехника и средства конструирования. Виды
Актуализация знаний
В нашей жизни – в школе, на работе, дома нас
Актуализация знаний
В нашей жизни – в школе, на работе, дома нас
Что такое робот?
Слово «робот» было придумано чешским писателем Карелом Чапеком и его братом
Что такое робот?
Слово «робот» было придумано чешским писателем Карелом Чапеком и его братом
История изобретения робота
Оказывается, первые мысли к созданию роботов возникли еще до
История изобретения робота
Оказывается, первые мысли к созданию роботов возникли еще до
История изобретения робота
Своим названием я хотел подчеркнуть способность моего робота отвечать
История изобретения робота
Своим названием я хотел подчеркнуть способность моего робота отвечать
История изобретения робота
Самыми первыми были изобретены именно промышленные роботы. В 1980
История изобретения робота
Самыми первыми были изобретены именно промышленные роботы. В 1980
Виды роботов
Роботы первого поколения (программные) - роботы с программным управлением, предназначенные
Виды роботов
Роботы первого поколения (программные) - роботы с программным управлением, предназначенные

Роботы первого, второго и третьего поколения
Роботы первого, второго и третьего поколения
Виды роботов по области использования
промышленные;
бытовые;
медицинские;
обучающие;
военные;
охранные роботы;
биороботы;
роботы-игрушки;
нанороботы;
а также андроиды и киборги.
Виды роботов по области использования
промышленные;
бытовые;
медицинские;
обучающие;
военные;
охранные роботы;
биороботы;
роботы-игрушки;
нанороботы;
а также андроиды и киборги.

Подвиды современных роботов
Промышленные роботы медицинские роботы
Подвиды современных роботов
Промышленные роботы медицинские роботы
Роботы – Эко и танцующие
Роботы – Эко и танцующие
Подвиды современных роботов
К настоящему времени роботы внедрены во многие сферы деятельности
Подвиды современных роботов
К настоящему времени роботы внедрены во многие сферы деятельности
Сведения о робототехнике
Робототехника – прикладная наука, занимающаяся разработкой автоматизированных технических систем. Робототехника
Сведения о робототехнике
Робототехника – прикладная наука, занимающаяся разработкой автоматизированных технических систем. Робототехника
Сведения о робототехнике
Кроме того, по мере развития и совершенствования робототехнических устройств
Сведения о робототехнике
Кроме того, по мере развития и совершенствования робототехнических устройств
Законы робототехники
При создании робототехники нужно руководствоваться правилами, по которым робот не может
Законы робототехники
При создании робототехники нужно руководствоваться правилами, по которым робот не может
Техника безопасности при роботостроении
1. Запрещается использование инструментов и предметов, правила обращения,
Техника безопасности при роботостроении
1. Запрещается использование инструментов и предметов, правила обращения,
Классы роботов
Манипуляционный робот — автоматическая машина (стационарная или передвижная), состоящая из исполнительного
Классы роботов
Манипуляционный робот — автоматическая машина (стационарная или передвижная), состоящая из исполнительного
Компоненты роботов
Приводы — это «мышцы» роботов. В настоящее время самыми популярными двигателями
Компоненты роботов
Приводы — это «мышцы» роботов. В настоящее время самыми популярными двигателями
Компоненты роботов
Пьезодвигатели: Современной альтернативой двигателям постоянного тока являются пьезодвигатели, также известные
Компоненты роботов
Пьезодвигатели: Современной альтернативой двигателям постоянного тока являются пьезодвигатели, также известные
Компоненты роботов
Воздушные мышцы: Воздушные мышцы — простое, но мощное устройство для
Компоненты роботов
Воздушные мышцы: Воздушные мышцы — простое, но мощное устройство для

Способы перемещения
Колёсные и гусеничные роботы
Шагающие роботы
Другие методы перемещения:
Летающие роботы (в том
Способы перемещения
Колёсные и гусеничные роботы
Шагающие роботы
Другие методы перемещения:
Летающие роботы (в том
Системы управления
Под управлением роботом понимается решение комплекса задач, связанных с адаптацией
Системы управления
Под управлением роботом понимается решение комплекса задач, связанных с адаптацией
Системы управления
3. Интерактивные:
3.1. автоматизированные (возможно чередование автоматических и биотехнических режимов);
3.2. супервизорные (автоматические
Системы управления
3. Интерактивные:
3.1. автоматизированные (возможно чередование автоматических и биотехнических режимов);
3.2. супервизорные (автоматические
Устройства передвижения роботов
Устройство передвижения робота является исполнительной частью робота и конструктивно
Устройства передвижения роботов
Устройство передвижения робота является исполнительной частью робота и конструктивно
Способы передвижения роботов
Управление передвижением промышленных роботов выполняется по одному из следующих
Способы передвижения роботов
Управление передвижением промышленных роботов выполняется по одному из следующих
Первый способ передвижения
Конструктивное выполнение устройства передвижения по первому способу имеет особенности, связанные с
Первый способ передвижения
Конструктивное выполнение устройства передвижения по первому способу имеет особенности, связанные с
Второй способ передвижения
При использовании второго способа выход робота в заданные позиции осуществляется с
Второй способ передвижения
При использовании второго способа выход робота в заданные позиции осуществляется с
Третий способ передвижения
Третий способ организации передвижения робота является комбинацией первого и второго
Третий способ передвижения
Третий способ организации передвижения робота является комбинацией первого и второго
Четвёртый способ передвижения
Четвертый способ организации передвижения робота является по существу, модификацией
Четвёртый способ передвижения
Четвертый способ организации передвижения робота является по существу, модификацией
Снабжение роботов устройствами передвижения существенно расширяет их технические возможности и обеспечивает
1)
Снабжение роботов устройствами передвижения существенно расширяет их технические возможности и обеспечивает
1)
Кинематика механизмов. Кинематические пары: понятие, типы. Кинематические схемы механизмов, правила их
Кинематика механизмов. Кинематические пары: понятие, типы. Кинематические схемы механизмов, правила их
Устройство машины
В состав машины входят различные механизмы.
Механизм состоит из отдельных твёрдых
Устройство машины
В состав машины входят различные механизмы.
Механизм состоит из отдельных твёрдых
Устройство машины
Звено – одно или несколько соединённых твёрдых тел.
Кинематическая пара
Устройство машины
Звено – одно или несколько соединённых твёрдых тел.
Кинематическая пара


Практическая работа № 38: Изучение кинематических схем
Задание:
Изучить механизмы машины
Познакомиться с понятиями
Практическая работа № 38: Изучение кинематических схем
Задание:
Изучить механизмы машины
Познакомиться с понятиями
Кинематическая схема
Кинематическая схема
Кинематические схемы промышленных роботов
Кинематические схемы промышленных роботов
Кинематические схемы промышленных роботов
Кинематические схемы промышленных роботов
Кинематический и конструктивный анализ промышленных роботов (степень подвижности руки человека (а)
Кинематический и конструктивный анализ промышленных роботов (степень подвижности руки человека (а)
Кинематический и конструктивный анализ роботов
Кинематическая структура ПР и их двигательные возможности
Кинематический и конструктивный анализ роботов
Кинематическая структура ПР и их двигательные возможности
Кинематический и конструктивный анализ роботов
Как ориентирующие, так и транспортирующие движения должны
Кинематический и конструктивный анализ роботов
Как ориентирующие, так и транспортирующие движения должны
Кинематический и конструктивный анализ роботов
Использование кинематических пар V класса - поступательных
Кинематический и конструктивный анализ роботов
Использование кинематических пар V класса - поступательных
Кинематический и конструктивный анализ роботов
Три поступательные пары, оси которых взаимно перпендикулярны,
Кинематический и конструктивный анализ роботов
Три поступательные пары, оси которых взаимно перпендикулярны,
Кинематический и конструктивный анализ роботов
Если предположить, что все четыре схемы ПР
Кинематический и конструктивный анализ роботов
Если предположить, что все четыре схемы ПР
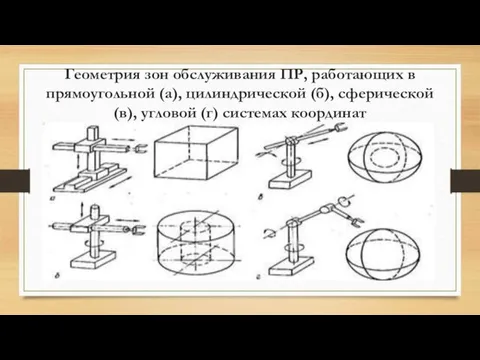
Геометрия зон обслуживания ПР, работающих в прямоугольной (а), цилиндрической (б), сферической
Геометрия зон обслуживания ПР, работающих в прямоугольной (а), цилиндрической (б), сферической
В последнее время широко применяется схема ПР с горизонтальной «рукой» шарнирно
В последнее время широко применяется схема ПР с горизонтальной «рукой» шарнирно

Рисунок 5 - Схема ПР с горизонтальной рукой шарнирно сочлененной конструкции
Рисунок 5 - Схема ПР с горизонтальной рукой шарнирно сочлененной конструкции
Геометрические характеристики степеней подвижности и способ установки ПР
Каждый вариант кинематической структуры
Геометрические характеристики степеней подвижности и способ установки ПР
Каждый вариант кинематической структуры

Итог урока
Ответы на вопросы:
Что такое робот?
Виды роботов.
Дать определение робототехники.
Итог урока
Ответы на вопросы:
Что такое робот?
Виды роботов.
Дать определение робототехники.
Домашнее задание
Конспект
Проект робота
Домашнее задание
Конспект
Проект робота
 Дәлелді медицинаны дәрілік заттарды қолдану құралы ретінде. Дәрілік заттарды жарнамалау
Дәлелді медицинаны дәрілік заттарды қолдану құралы ретінде. Дәрілік заттарды жарнамалау Растениеводство
Растениеводство Цифро-аналоговый преобразователь: структурная схема и принцип действия
Цифро-аналоговый преобразователь: структурная схема и принцип действия Бюджетное учреждение Вологодской области Череповецкий центр психолого-педагогической, медицинской и социальной помощи
Бюджетное учреждение Вологодской области Череповецкий центр психолого-педагогической, медицинской и социальной помощи Моделирование юбок на основе прямой юбки
Моделирование юбок на основе прямой юбки Презентация Теория электролитической диссоциации (ТЭД)
Презентация Теория электролитической диссоциации (ТЭД) Презентация к классному часу Я люблю тебя , Россия! Диск
Презентация к классному часу Я люблю тебя , Россия! Диск Территориальный маркетинг в системе регионального управления
Территориальный маркетинг в системе регионального управления Мои первые шаги в науку
Мои первые шаги в науку Гельминты в почве. Аскаридоз
Гельминты в почве. Аскаридоз Подгрупповое занятие по РСВ и ФП.
Подгрупповое занятие по РСВ и ФП. Dmitry Ivanovich Mendeleev
Dmitry Ivanovich Mendeleev Пользовательский интерфейс
Пользовательский интерфейс Сифилис области лица и челюстей
Сифилис области лица и челюстей Представление целых чисел на координатной оси
Представление целых чисел на координатной оси Комфортная городская среда
Комфортная городская среда Презентация к консультации для воспитателей: Дошкольник в мире сюжетной игры
Презентация к консультации для воспитателей: Дошкольник в мире сюжетной игры Инвестиционная программа группы компаний Алмида
Инвестиционная программа группы компаний Алмида Нарушенные земли и общие подходы к их рекультивации
Нарушенные земли и общие подходы к их рекультивации Возрастные особенности детей 4-5 лет
Возрастные особенности детей 4-5 лет Игра-мультимедиа на развитие логического мышления Диск
Игра-мультимедиа на развитие логического мышления Диск Биологическая викторина Три клада у природы есть...
Биологическая викторина Три клада у природы есть... Культура стран халифата
Культура стран халифата Смысл жизни. Виктор Франкл. (Тема 7)
Смысл жизни. Виктор Франкл. (Тема 7) Презентация к уроку по теме Естествознание-единство наук о природе
Презентация к уроку по теме Естествознание-единство наук о природе Типовые формы патологии и реактивных изменений в системе лейкоцитов
Типовые формы патологии и реактивных изменений в системе лейкоцитов Projektowanie systemów informacyjnych
Projektowanie systemów informacyjnych Атмосфера. Состав, строение, циркуляция
Атмосфера. Состав, строение, циркуляция