- Робототехника. Системы автоматического управления устройств

Содержание
- 2. Актуализация В 21веке робототехника используется во всех видах промышленности, строительства, быта, авиации, особенно в экстремальных сферах
- 3. Тема, цель и задачи урока Тема урока: «Робототехника. Системы автоматического управления. Программированные устройства» Цель урока: организовать
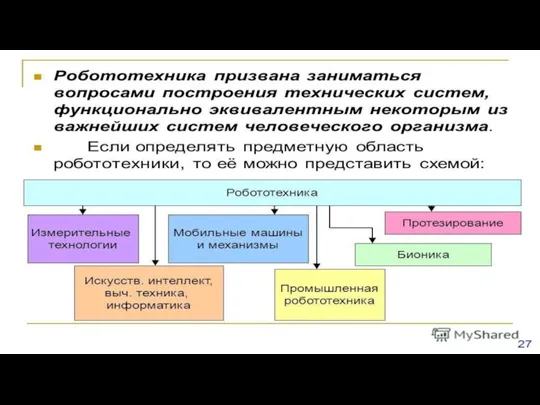
- 4. Робототехника Робототехника – ( от робот; англ. Robotics робототехника) – прикладная наука, занимающаяся разработкой автоматизированных технических
- 5. Робототехника Некоторые идеи, положенные позднее в основу робототехники, появились ещё в античную эпоху — задолго до
- 7. Робототехника (История отрасли) Некоторые идеи, положенные позднее в основу робототехники, появились ещё в античную эпоху —
- 9. Робототехника (История отрасли) Широкое внедрение промышленных станков с числовым программным управлением стало стимулом для создания программных
- 10. Классификация роботов Классификации роботов — например, по сфере применения, по назначению, по способу передвижения, и пр.
- 11. Компоненты роботов Приводы Приводы: это «мышцы» роботов. В настоящее время самыми популярными двигателями в приводах являются
- 12. Способы перемещения Колёсные и гусеничные роботы Наиболее распространёнными роботами данного класса являются четырёхколёсные и гусеничные. Колёсные
- 13. Колёсные роботы Шаровой двухколёсный сегвей Перевёрнутый маятник шаговой гироскоп
- 14. Шагающие и гусинечные Робот –аноид ASIMO Гусеничный движетель
- 15. Летающие роботы
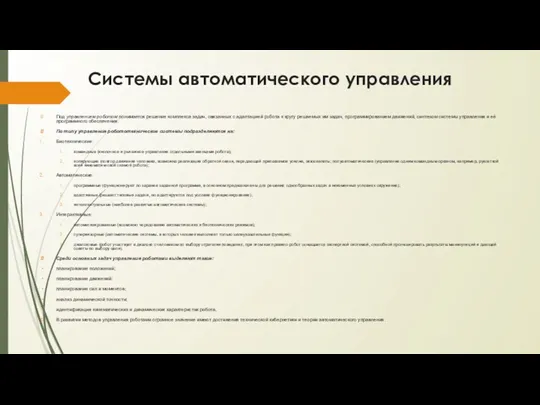
- 16. Системы автоматического управления Под управлением роботом понимается решение комплекса задач, связанных с адаптацией робота к кругу
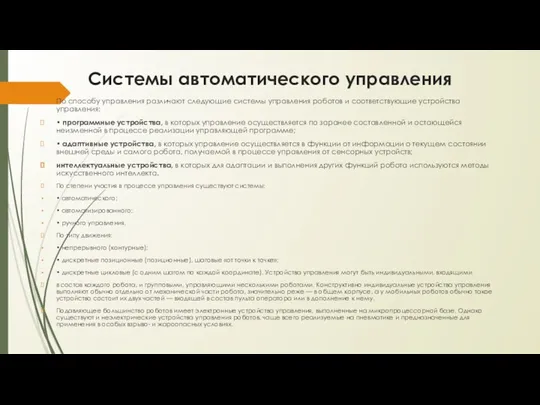
- 17. Системы автоматического управления По способу управления различают следующие системы управления роботов и соответствующие устройства управления: •
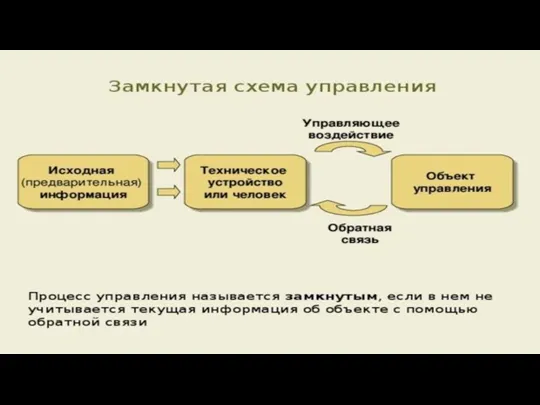
- 18. Системы автоматического управления Разомкнутая система управления- система автоматического управления без обратной связи: управляющие воздействия вырабатываются устройством
- 21. Области применения Образование Робототехнические комплексы также популярны в области образования как современные высокотехнологичные исследовательские инструменты в
- 22. Области применения Промышленность На производстве роботы успешно используются уже на протяжении десятилетий. Роботы успешно заменяют человека
- 24. Области применения Токарно-фрезерный станок обрабатывающий центр с ЧПУ Оборудование с ЧПУ может быть представлено: станочным парком,
- 26. Области применения Спорт Первый чемпионат мира по футболу среди роботов прошёл в Японии в 1996 году.
- 27. Программирование работы устройств Основы программирования промышленных роботов были заложены на заре XIX века во Франции. Здесь
- 29. Программирование работы устройств Чтобы кремний микропроцессора смог взять на себя функции мозга робота, необходимо "залить" в
- 30. Робототехника и искусственный интеллект Специалисты Оксфордского университета предупреждают, что в ближайшие два десятилетия машинные технологии заменят
- 33. Скачать презентацию
Актуализация
В 21веке робототехника используется во всех видах промышленности, строительства, быта, авиации,
Актуализация
В 21веке робототехника используется во всех видах промышленности, строительства, быта, авиации,
Тема, цель и задачи урока
Тема урока: «Робототехника. Системы автоматического управления. Программированные
Тема, цель и задачи урока
Тема урока: «Робототехника. Системы автоматического управления. Программированные
Робототехника
Робототехника – ( от робот; англ. Robotics робототехника) – прикладная наука,
Робототехника
Робототехника – ( от робот; англ. Robotics робототехника) – прикладная наука,
Робототехника
Некоторые идеи, положенные позднее в основу робототехники, появились ещё в античную
Робототехника
Некоторые идеи, положенные позднее в основу робототехники, появились ещё в античную
Робототехника (История отрасли)
Некоторые идеи, положенные позднее в основу робототехники, появились ещё
Робототехника (История отрасли)
Некоторые идеи, положенные позднее в основу робототехники, появились ещё

Робототехника (История отрасли)
Широкое внедрение промышленных станков с числовым программным управлением
Робототехника (История отрасли)
Широкое внедрение промышленных станков с числовым программным управлением
Классификация роботов
Классификации роботов — например, по сфере применения, по назначению, по способу
Классификация роботов
Классификации роботов — например, по сфере применения, по назначению, по способу
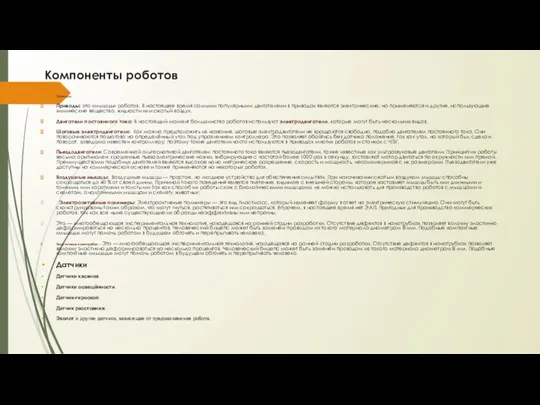
Компоненты роботов
Приводы
Приводы: это «мышцы» роботов. В настоящее время самыми популярными
Компоненты роботов
Приводы
Приводы: это «мышцы» роботов. В настоящее время самыми популярными
Способы перемещения
Колёсные и гусеничные роботы
Наиболее распространёнными роботами данного класса являются четырёхколёсные и
Способы перемещения
Колёсные и гусеничные роботы
Наиболее распространёнными роботами данного класса являются четырёхколёсные и
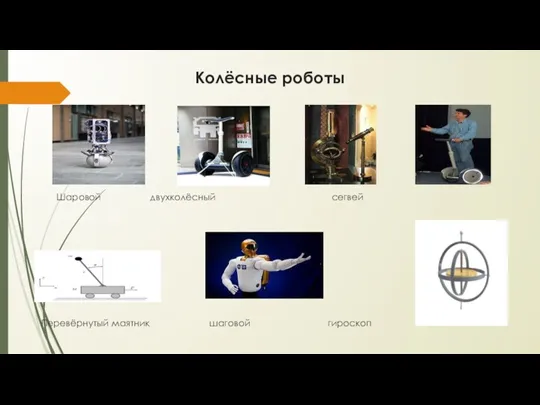
Колёсные роботы
Шаровой двухколёсный сегвей
Перевёрнутый маятник шаговой гироскоп
Колёсные роботы
Шаровой двухколёсный сегвей
Перевёрнутый маятник шаговой гироскоп

Шагающие и гусинечные
Робот –аноид ASIMO Гусеничный движетель
Шагающие и гусинечные
Робот –аноид ASIMO Гусеничный движетель
Летающие роботы
Летающие роботы
Системы автоматического управления
Под управлением роботом понимается решение комплекса задач, связанных с адаптацией робота
Системы автоматического управления
Под управлением роботом понимается решение комплекса задач, связанных с адаптацией робота
Системы автоматического управления
По способу управления различают следующие системы управления роботов и
Системы автоматического управления
По способу управления различают следующие системы управления роботов и

Системы автоматического управления
Разомкнутая система управления- система автоматического управления без обратной связи:
Системы автоматического управления
Разомкнутая система управления- система автоматического управления без обратной связи:
Области применения
Образование
Робототехнические комплексы также популярны в области образования как современные
Области применения
Образование
Робототехнические комплексы также популярны в области образования как современные
Области применения
Промышленность
На производстве роботы успешно используются уже на протяжении десятилетий. Роботы
Области применения
Промышленность
На производстве роботы успешно используются уже на протяжении десятилетий. Роботы

Области применения
Токарно-фрезерный станок обрабатывающий центр с ЧПУ
Оборудование с ЧПУ может быть
Области применения
Токарно-фрезерный станок обрабатывающий центр с ЧПУ
Оборудование с ЧПУ может быть

Области применения
Спорт
Первый чемпионат мира по футболу среди роботов прошёл в Японии
Области применения
Спорт
Первый чемпионат мира по футболу среди роботов прошёл в Японии
Программирование работы устройств
Основы программирования промышленных роботов были заложены на заре XIX
Программирование работы устройств
Основы программирования промышленных роботов были заложены на заре XIX

Программирование работы устройств
Чтобы кремний микропроцессора смог взять на себя функции мозга
Программирование работы устройств
Чтобы кремний микропроцессора смог взять на себя функции мозга
Робототехника и искусственный интеллект
Специалисты Оксфордского университета предупреждают, что в ближайшие два
Робототехника и искусственный интеллект
Специалисты Оксфордского университета предупреждают, что в ближайшие два

 Классный час В Стране Вежливости и Доброты
Классный час В Стране Вежливости и Доброты Презентация: Урок-безопасности Чужой
Презентация: Урок-безопасности Чужой Точное земледелие
Точное земледелие Физическое насилие, факторы риска, признаки, позволяющие заподозрить физическое насилие
Физическое насилие, факторы риска, признаки, позволяющие заподозрить физическое насилие Викторина по сказке Александра Волкова Волшебник Изумрудного города
Викторина по сказке Александра Волкова Волшебник Изумрудного города Чудо - дерево. Сказки и оформление детей подготовительной группы № 9
Чудо - дерево. Сказки и оформление детей подготовительной группы № 9 Взаимодействие тел. Масса тел. Инертность
Взаимодействие тел. Масса тел. Инертность Чудеса Устьянского района. Викторина
Чудеса Устьянского района. Викторина Органи та системи органів
Органи та системи органів Презентация проекта ЭкоСелфи
Презентация проекта ЭкоСелфи Презентация Вязание крючком
Презентация Вязание крючком Я - гражданин и патриот России!
Я - гражданин и патриот России! Урок 32. Поняття мови програмування
Урок 32. Поняття мови програмування Контроль качества кровельных работ (плоская крыша)
Контроль качества кровельных работ (плоская крыша) 27a143fd9fb04a2ab729c298e0733f83
27a143fd9fb04a2ab729c298e0733f83 Past Simple (Was/Were)
Past Simple (Was/Were) ISO 45001. Система менеджмента охраны здоровья и безопасности труда
ISO 45001. Система менеджмента охраны здоровья и безопасности труда Особенности изъятия узлов (петель) с места происшествия и их трасологического исследования
Особенности изъятия узлов (петель) с места происшествия и их трасологического исследования Пословицы и поговорки – народная копилка евангельских нравственных принципов
Пословицы и поговорки – народная копилка евангельских нравственных принципов The art of negotiation
The art of negotiation Манометры и гидравлическое оборудование
Манометры и гидравлическое оборудование Конструктивные особенности конвейеров
Конструктивные особенности конвейеров Нейролингвистика. Экспериментальная и клиническая лингвистика
Нейролингвистика. Экспериментальная и клиническая лингвистика Медициналық клиникалық зерттеулердің дизайны
Медициналық клиникалық зерттеулердің дизайны Жировые,углеводные и минеральные дистрофии. Лекция по патологической анатомии
Жировые,углеводные и минеральные дистрофии. Лекция по патологической анатомии Использование нейронных сетей для исследования перколяционных моделей
Использование нейронных сетей для исследования перколяционных моделей Активизация творческой деятельности учащихся на уроках математики с использованием ИКТ
Активизация творческой деятельности учащихся на уроках математики с использованием ИКТ Шаблон оформления дипломной работы
Шаблон оформления дипломной работы