Робототехника. Системы дистанционного управления. Технологические основы и направления роботизации презентация
- Робототехника. Системы дистанционного управления. Технологические основы и направления роботизации

Содержание
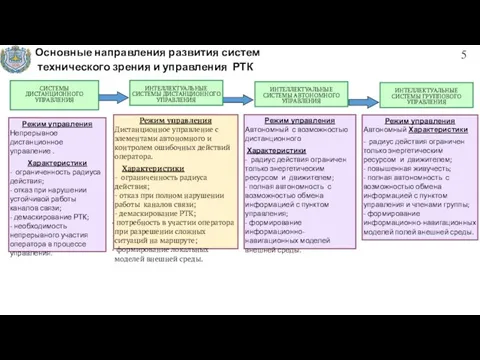
- 5. Основные направления развития систем технического зрения и управления РТК Режим управления Непрерывное дистанционное управление . Характеристики
- 6. Технологические основы и направления роботизации ВВТ СВ Комплексы датчиков различной физической природы и диапазонов длин волн
- 7. Этапность развития систем автономного управления движением РТК Движение РТК ДУ режиме Автономное движение групп РТК Обнаружение
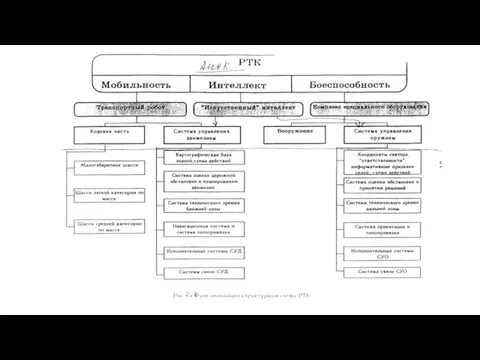
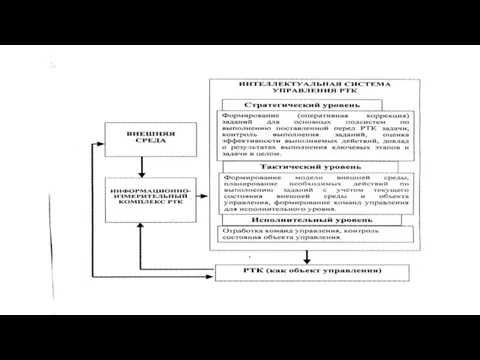
- 8. Функционально-структурная схема СУ РТК
- 9. Функционально-аппаратная схема РТК
- 10. Структурная схема системы телеуправления движением
- 11. Структурная схема СУД по пересеченной местности
- 12. Обобщенная структурная схема системы управления движением РТК
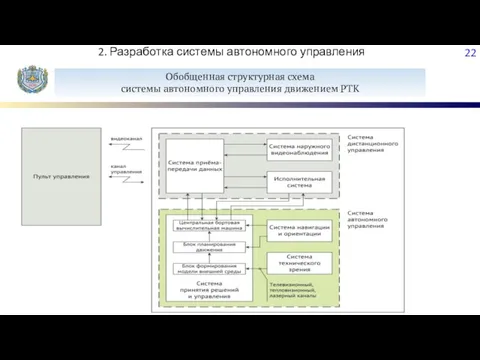
- 13. Обобщенная структурная схема системы автономного управления движением РТК 22 2. Разработка системы автономного управления
- 14. Система автоматического управления движением 13 Перечень сокращений: СТЗ АУД - система технического зрения обеспечения режима автоматического
- 15. СТЗ для дистанционного управления движением МРК
- 16. СТЗ для автономного управления движением РТК и формирования объемных моделей внешней среды
- 17. Распознавание типов грунтов по данным комплексированной СТЗ а) видеопанорама внешней среды - асфальт - песок -
- 18. Робототехнический комплекс «Алиса»
- 19. Робототехнический комплекс «КЛАВИР»
- 20. Робототехнический комплекс «Проход»
- 21. Робототехнический комплекс разминирования ПРОХОД-1 Цель разработки Создание дистанционно-управляемого с элементами автономного управления робототехнического комплекса разминирования на
- 22. Робототехнический комплекс «МРК-АУ»
- 24. ОКР «ПОЖАР» ОКР «ПОЖАР», стадия ГИ.
- 25. БМД-4М 3
- 26. Опытно– конструкторская разработка «Кунгас» БТР-МДМ «Ракушка»
- 30. Подвижный пункт управления на базе унифицированной командно-штабной машины 20 Подвижный пункт управления (ППУ) на базе унифицированной
- 31. Решаемые задачи: 1. Привязка к местности и навигация; 2. Обследование области интереса и визуализация наблюдаемой обстановки
- 32. Типовые задачи применения групп роботов различного базирования Сельскохозяйственное назначение мониторинг состояния почв и посевов, целеуказание средствам
- 33. СЧ НИР «Разработка программно-аппаратных средств для исследования алгоритмов группового управления наземными РТК различного назначения и их
- 34. Наложение на видеоизображение (а) или план рабочей зоны (б) а) б) Пример интеллектуальной системы дистанционного управления
- 35. Пример использования информационно-навигационной модели для автономного применения навесного оборудования Фотопанорама рабочей зоны Цветная 3D-геометрическая модель с
- 37. Скачать презентацию
Основные направления развития систем
технического зрения и управления РТК
Режим управления
Непрерывное
Основные направления развития систем
технического зрения и управления РТК
Режим управления
Непрерывное

Технологические основы и направления роботизации
ВВТ СВ
Комплексы датчиков различной физической природы
Технологические основы и направления роботизации
ВВТ СВ
Комплексы датчиков различной физической природы
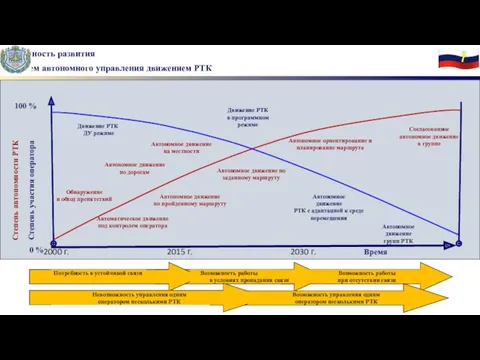
Этапность развития
систем автономного управления движением РТК
Движение РТК
ДУ режиме
Автономное
движение
Этапность развития
систем автономного управления движением РТК
Движение РТК
ДУ режиме
Автономное
движение

Функционально-структурная схема СУ РТК
Функционально-структурная схема СУ РТК

Функционально-аппаратная схема РТК
Функционально-аппаратная схема РТК

Структурная схема системы телеуправления движением
Структурная схема системы телеуправления движением

Структурная схема СУД по пересеченной местности
Структурная схема СУД по пересеченной местности

Обобщенная структурная схема
системы управления движением РТК
Обобщенная структурная схема
системы управления движением РТК
Обобщенная структурная схема
системы автономного управления движением РТК
22
2. Разработка системы автономного
Обобщенная структурная схема
системы автономного управления движением РТК
22
2. Разработка системы автономного

Система автоматического управления движением
13
Перечень сокращений:
СТЗ АУД - система технического зрения обеспечения
Система автоматического управления движением
13
Перечень сокращений:
СТЗ АУД - система технического зрения обеспечения

СТЗ для дистанционного управления движением МРК
СТЗ для дистанционного управления движением МРК
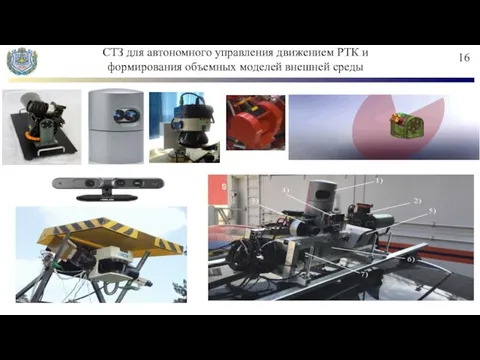
СТЗ для автономного управления движением РТК и
формирования объемных моделей внешней
СТЗ для автономного управления движением РТК и
формирования объемных моделей внешней
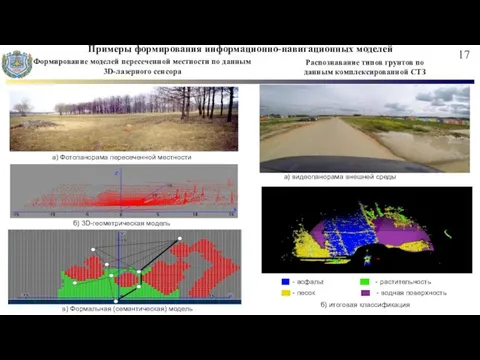
Распознавание типов грунтов по
данным комплексированной СТЗ
а) видеопанорама внешней среды
Распознавание типов грунтов по
данным комплексированной СТЗ
а) видеопанорама внешней среды

Робототехнический комплекс «Алиса»
Робототехнический комплекс «Алиса»

Робототехнический комплекс «КЛАВИР»
Робототехнический комплекс «КЛАВИР»

Робототехнический комплекс
«Проход»
Робототехнический комплекс «Проход»
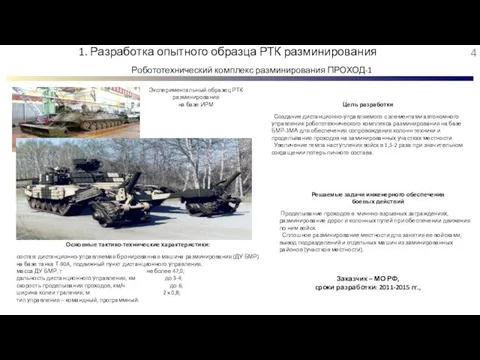
Робототехнический комплекс разминирования ПРОХОД-1
Цель разработки
Создание дистанционно-управляемого с элементами автономного управления
Робототехнический комплекс разминирования ПРОХОД-1
Цель разработки
Создание дистанционно-управляемого с элементами автономного управления
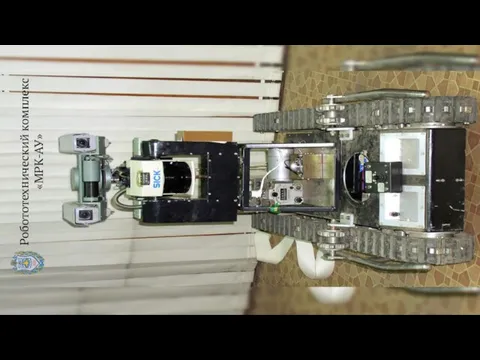
Робототехнический комплекс
«МРК-АУ»
Робототехнический комплекс «МРК-АУ»


ОКР «ПОЖАР»
ОКР «ПОЖАР», стадия ГИ.
ОКР «ПОЖАР»
ОКР «ПОЖАР», стадия ГИ.

БМД-4М
3
БМД-4М
3

Опытно– конструкторская разработка «Кунгас»
БТР-МДМ «Ракушка»
Опытно– конструкторская разработка «Кунгас»
БТР-МДМ «Ракушка»



Подвижный пункт управления на базе
унифицированной командно-штабной машины
20
Подвижный пункт управления (ППУ) на
20
Подвижный пункт управления (ППУ) на
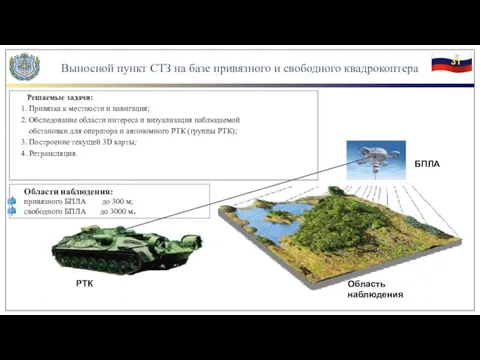
Решаемые задачи:
1. Привязка к местности и навигация;
2. Обследование
Решаемые задачи:
1. Привязка к местности и навигация;
2. Обследование

Типовые задачи применения групп роботов различного базирования
Сельскохозяйственное назначение
мониторинг состояния почв
Типовые задачи применения групп роботов различного базирования
Сельскохозяйственное назначение
мониторинг состояния почв
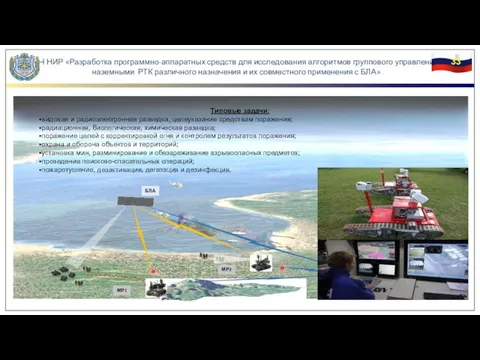
СЧ НИР «Разработка программно-аппаратных средств для исследования алгоритмов группового управления наземными
СЧ НИР «Разработка программно-аппаратных средств для исследования алгоритмов группового управления наземными

Наложение на видеоизображение (а) или план рабочей зоны (б)
а)
б)
Пример интеллектуальной системы
Наложение на видеоизображение (а) или план рабочей зоны (б)
а)
б)
Пример интеллектуальной системы

Пример использования информационно-навигационной модели
для автономного применения навесного оборудования
Фотопанорама рабочей зоны
Цветная
Пример использования информационно-навигационной модели
для автономного применения навесного оборудования
Фотопанорама рабочей зоны
Цветная
 Как заставить себя учиться
Как заставить себя учиться Презентация к реферату: Теория конфликта. Э.Фромм
Презентация к реферату: Теория конфликта. Э.Фромм Постійні магніти. Магнітне поле Землі
Постійні магніти. Магнітне поле Землі Great_Britain
Great_Britain Ребусы
Ребусы История и современное состояние индустрии туризма и гостепримства Крыма
История и современное состояние индустрии туризма и гостепримства Крыма Животные и окружающая среда
Животные и окружающая среда Экологическое развитие старших дошкольников в художественно-творческой деятельности
Экологическое развитие старших дошкольников в художественно-творческой деятельности Разработка проекта наладки РТК на базе станка с ЧПУ на обработку детали Шестерня VIII оси 1к62-02-119
Разработка проекта наладки РТК на базе станка с ЧПУ на обработку детали Шестерня VIII оси 1к62-02-119 Conditional. Условные предложения
Conditional. Условные предложения Какие бывают животные
Какие бывают животные Методы обработки металлов давлением: прокатка, прессование и волочение
Методы обработки металлов давлением: прокатка, прессование и волочение Мыло, и иные моющие средства
Мыло, и иные моющие средства Культура Средневековья
Культура Средневековья Құрманғазы Сағырбайұлы
Құрманғазы Сағырбайұлы Технологія виробництва м’яса страусів
Технологія виробництва м’яса страусів Накопление эмоционально-чувственного опыта детей при проведении театрализованных представлений в ДОУ
Накопление эмоционально-чувственного опыта детей при проведении театрализованных представлений в ДОУ Проект О перелетных птицах
Проект О перелетных птицах Трудные случаи согласования подлежащего и сказуемого
Трудные случаи согласования подлежащего и сказуемого Луганская область в годы Великой Отечественной войны
Луганская область в годы Великой Отечественной войны Творческий проект Шкатулка
Творческий проект Шкатулка Изготовление изделия Самолет
Изготовление изделия Самолет Сюжет и содержание в картине. Анализ художественного произведения. 7 класс
Сюжет и содержание в картине. Анализ художественного произведения. 7 класс Проектирование генеральных планов промышленных территорий. Лекция 6
Проектирование генеральных планов промышленных территорий. Лекция 6 Соединения химических элементов. Валентность и степень окисления элементов
Соединения химических элементов. Валентность и степень окисления элементов Патоморфология туберкулеза
Патоморфология туберкулеза Использование различных видов театра в работе с детьми
Использование различных видов театра в работе с детьми Урок по теме Закономерности распределения основных элементов климата на территории России
Урок по теме Закономерности распределения основных элементов климата на территории России