- Счет времени. Основные принципы спутниковой навигации

Содержание
- 2. Принято различать две группы единиц отсчета времени: • астрономические; • неастрономические. Основной астрономической единицей отсчета являются
- 3. Со́лнечные су́тки — промежуток времени, за который небесное тело совершает 1 поворот вокруг своей оси относительно
- 4. В основе измерений времени лежит атомное время АТ. Существует Международное атомное время TAI (Time Atomic International).
- 5. UTC (всемирное координированное время) — атомная шкала времени, аппроксимирующая UT1. Это международный стандарт, на котором базируется
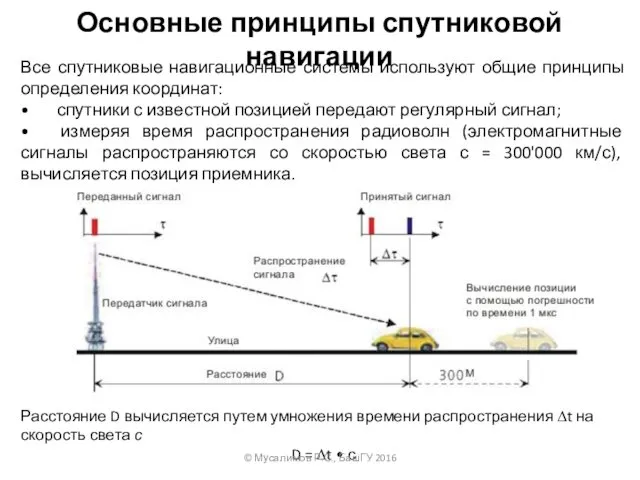
- 6. Расстояние = транзитное время * скорость звука Система GPS функционирует согласно такому же принципу. Для того
- 7. Все спутниковые навигационные системы используют общие принципы определения координат: • спутники с известной позицией передают регулярный
- 8. Как видно, чтобы точно вычислить позицию и время вдоль линии (принимаем, что линия продолжается только в
- 9. Системы спутниковой навигации используют высоко расположенные спутники, которые размещаются таким образом, чтобы из любой точки n
- 10. Кодовые измерения Кодовые наблюдения реализуются в самых простых по конструкции GPS-приемниках. Каждый спутник GPS навигационной системы
- 11. Характеристики сигналов, передаваемых КА © Мусалимов Р.С., БашГУ 2016
- 12. Позиция приемника в трехмерном пространстве определяется в точке пересечения трех сфер Определение позиции на карте Позиция
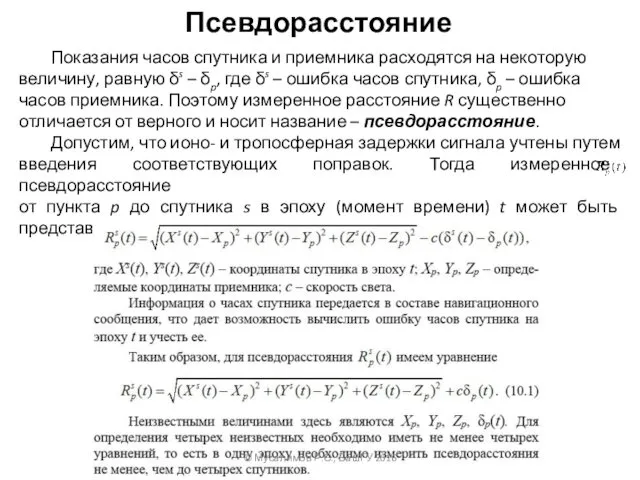
- 13. Псевдорасстояние Показания часов спутника и приемника расходятся на некоторую величину, равную δs – δp, где δs
- 14. Фазовые измерения Фазовые наблюдения выполняются для повышения точности измерений. В этом случае при сравнении принятого со
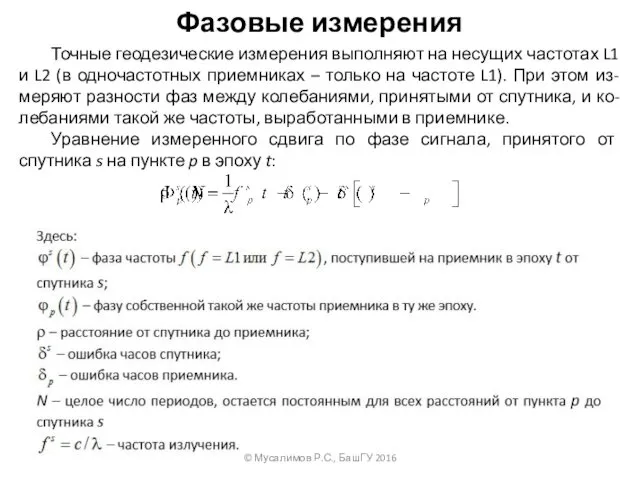
- 15. Фазовые измерения Точные геодезические измерения выполняют на несущих частотах L1 и L2 (в одночастотных приемниках –
- 16. Фазовые измерения Разности фаз измеряют с высокой точностью, соответствующей долям миллиметра. Однако вычислить решением системы уравнений
- 17. Релятивистский эффект частоты Он возникает по двум причинам: большой скорости движения спутника и различия гравитационного потенциала
- 19. Скачать презентацию
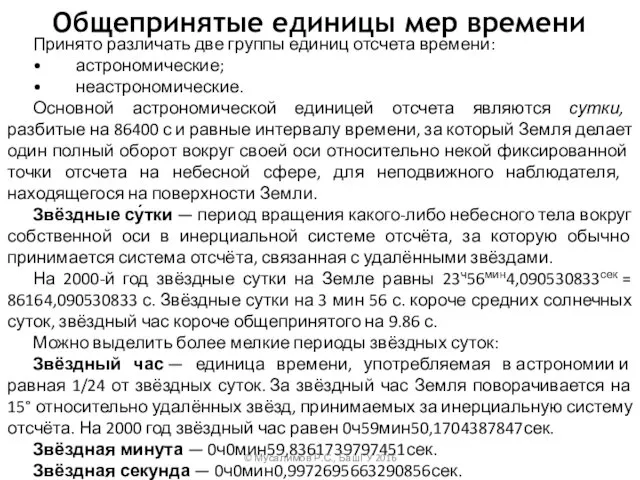
Принято различать две группы единиц отсчета времени:
• астрономические;
• неастрономические.
Основной астрономической единицей
Принято различать две группы единиц отсчета времени:
• астрономические;
• неастрономические.
Основной астрономической единицей
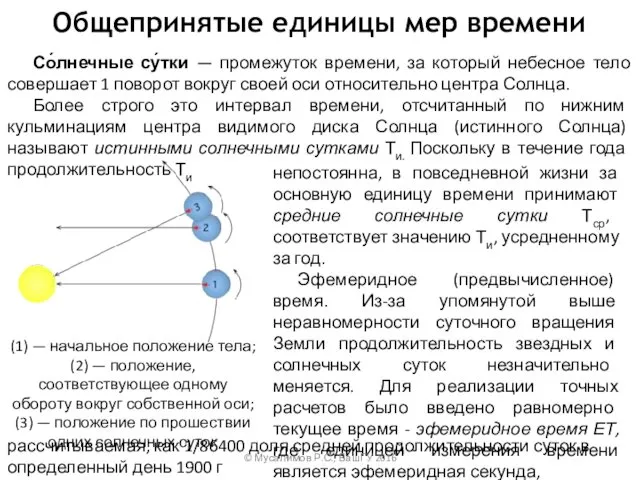
Со́лнечные су́тки — промежуток времени, за который небесное тело совершает 1
Со́лнечные су́тки — промежуток времени, за который небесное тело совершает 1
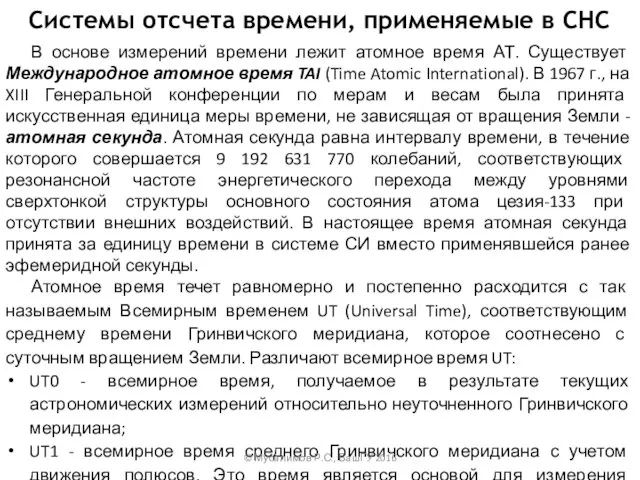
В основе измерений времени лежит атомное время АТ. Существует Международное атомное
В основе измерений времени лежит атомное время АТ. Существует Международное атомное
UTC (всемирное координированное время) — атомная шкала времени, аппроксимирующая UT1. Это
UTC (всемирное координированное время) — атомная шкала времени, аппроксимирующая UT1. Это
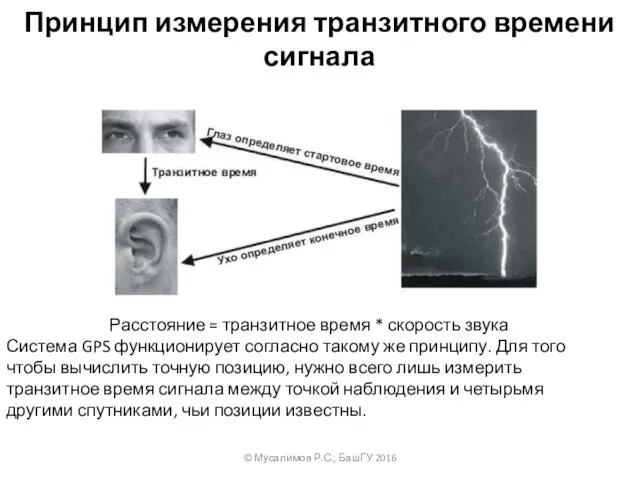
Расстояние = транзитное время * скорость звука
Система GPS функционирует согласно такому
Расстояние = транзитное время * скорость звука
Система GPS функционирует согласно такому
Все спутниковые навигационные системы используют общие принципы определения координат:
• спутники с
Все спутниковые навигационные системы используют общие принципы определения координат:
• спутники с
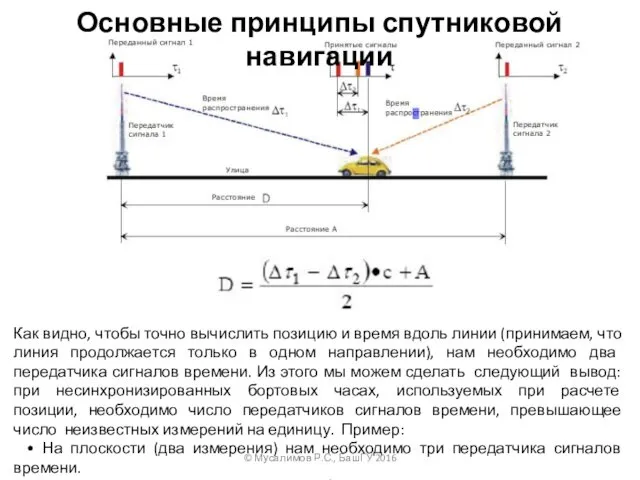
Как видно, чтобы точно вычислить позицию и время вдоль линии (принимаем,
Как видно, чтобы точно вычислить позицию и время вдоль линии (принимаем,

Системы спутниковой навигации используют высоко расположенные спутники, которые размещаются таким образом,
Системы спутниковой навигации используют высоко расположенные спутники, которые размещаются таким образом,
Кодовые измерения
Кодовые наблюдения реализуются в самых простых по конструкции GPS-приемниках.
Кодовые измерения
Кодовые наблюдения реализуются в самых простых по конструкции GPS-приемниках.
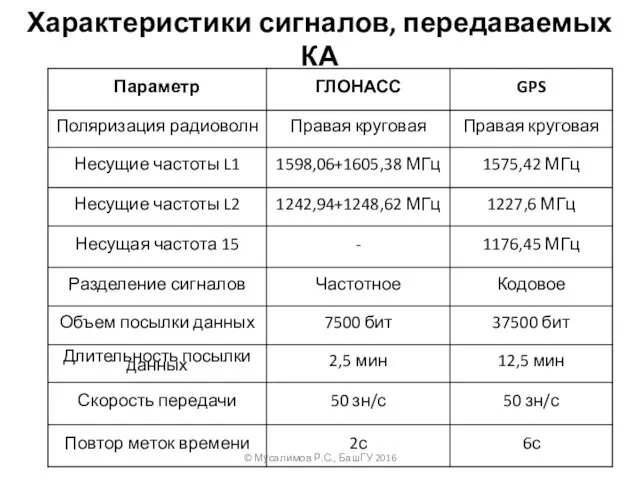
Характеристики сигналов, передаваемых КА
© Мусалимов Р.С., БашГУ 2016
Характеристики сигналов, передаваемых КА
© Мусалимов Р.С., БашГУ 2016
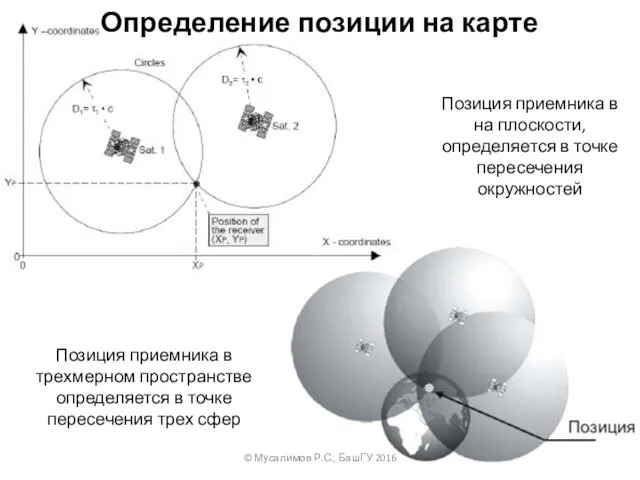
Позиция приемника в трехмерном пространстве определяется в точке пересечения трех сфер
Определение
Позиция приемника в трехмерном пространстве определяется в точке пересечения трех сфер
Определение
Псевдорасстояние
Показания часов спутника и приемника расходятся на некоторую величину, равную δs
Псевдорасстояние
Показания часов спутника и приемника расходятся на некоторую величину, равную δs
Фазовые измерения
Фазовые наблюдения выполняются для повышения точности измерений. В этом
Фазовые измерения
Фазовые наблюдения выполняются для повышения точности измерений. В этом
Фазовые измерения
Точные геодезические измерения выполняют на несущих частотах L1 и
Фазовые измерения
Точные геодезические измерения выполняют на несущих частотах L1 и
Фазовые измерения
Разности фаз измеряют с высокой точностью, соответствующей долям миллиметра.
Фазовые измерения
Разности фаз измеряют с высокой точностью, соответствующей долям миллиметра.
Релятивистский эффект частоты
Он возникает по двум причинам: большой скорости движения спутника
Релятивистский эффект частоты
Он возникает по двум причинам: большой скорости движения спутника
 Портфолио учителя математики
Портфолио учителя математики Рулонные кровельные и гидроизоляционные материалы на основе эластомеров
Рулонные кровельные и гидроизоляционные материалы на основе эластомеров Организм человека и его здоровье
Организм человека и его здоровье Правила игры Мафия
Правила игры Мафия 1 сентября - День знаний
1 сентября - День знаний Из опыта работы с родителями
Из опыта работы с родителями Graffiti
Graffiti Связь деления и умножения
Связь деления и умножения Общественный строй и церковная организация на Руси
Общественный строй и церковная организация на Руси Театральное и цирковое искусство Древнего Рима
Театральное и цирковое искусство Древнего Рима ВПР по биологии 5 класс
ВПР по биологии 5 класс Альбрехт Дюрер (1471 – 1528)
Альбрехт Дюрер (1471 – 1528) Паровая турбина, строение и принцип работы
Паровая турбина, строение и принцип работы операции подрезания и обтачмванмя
операции подрезания и обтачмванмя Географические исследования на территории Казахстана
Географические исследования на территории Казахстана История спортивных игр
История спортивных игр урок по мордовскому языку
урок по мордовскому языку Атмосферное давление
Атмосферное давление Патология сердечно-сосудистой системы
Патология сердечно-сосудистой системы Презентация История появления газет 3-4 класс
Презентация История появления газет 3-4 класс Техніка безпеки при роботі з комп’ютером. Інформатика як наука та галузь діяльності людини
Техніка безпеки при роботі з комп’ютером. Інформатика як наука та галузь діяльності людини Кальций. Маңызды химиялық формулалар
Кальций. Маңызды химиялық формулалар Єкологія моєї країни
Єкологія моєї країни Железоуглеродистые, легированные и цветные сплавы
Железоуглеродистые, легированные и цветные сплавы ТЭК: Электроэнергетика России
ТЭК: Электроэнергетика России Основы логики и логические основы компьютера
Основы логики и логические основы компьютера Презентация Педагогическая деятельность Пришва Ирины Геннадьевны
Презентация Педагогическая деятельность Пришва Ирины Геннадьевны Уотсон Джон (1878-1958)
Уотсон Джон (1878-1958)