- Система управления движением наземным роботом на основе данных с лазерного сканера

Содержание
- 2. Актуальные задачи управления наземным роботом Упрощение и облегчение управления Повышение интенсивной эксплуатации в сложных дорожных и
- 3. Архитектура системного программного обеспечения
- 4. Подсистема планирования маршрута Вычисляет кратчайший маршрут на основе карты дорожной сети, текущего положения наземного робота и
- 5. Ассортимент лазерных сканеров от SICK AG SICK LMS 200 SICK LMS 291 SICK LMS 111 SICK
- 6. Планирование локальной траектории наземного робота в реальном времени В процессе планирования генерируется набор траекторий, позволяющих осуществить
- 7. Примеры путей Дьюбинса Путь Дьюбинса (Dubins path) - способ представления траектории в виде набора дуг и
- 8. Информация, получаемая с лазерного сканера SICK LD-MRS, переведенная в графическое представление
- 9. Карта проходимости, полученная с помощью лазерного сканера SICK и алгоритмов моделирования препятствий
- 10. Алгоритм планирования локальной траектории
- 11. Примеры промежуточных точек, лежащих в области впереди наземного робота
- 12. Пример полученных траекторий (зеленая линия) и лучшая траектория (красная линия)
- 13. Взаимосвязь блоков программного обеспечения для моделирования движения мобильного робота Компьютер 1 - Программное обеспечение моделирования работы
- 14. Установление целевых вершин движения мобильного робота
- 15. Структурированная местность с отображением различных препятствий и движение мобильного робота по заданным целевым вершинам
- 17. Скачать презентацию
Актуальные задачи управления наземным роботом
Упрощение и облегчение управления
Повышение интенсивной эксплуатации в
Актуальные задачи управления наземным роботом
Упрощение и облегчение управления
Повышение интенсивной эксплуатации в

Архитектура системного программного обеспечения
Архитектура системного программного обеспечения
Подсистема планирования маршрута
Вычисляет кратчайший маршрут на основе карты дорожной сети, текущего
Подсистема планирования маршрута
Вычисляет кратчайший маршрут на основе карты дорожной сети, текущего

Ассортимент лазерных сканеров от SICK AG
SICK LMS 200
SICK LMS 291
SICK LMS
Ассортимент лазерных сканеров от SICK AG
SICK LMS 200
SICK LMS 291
SICK LMS
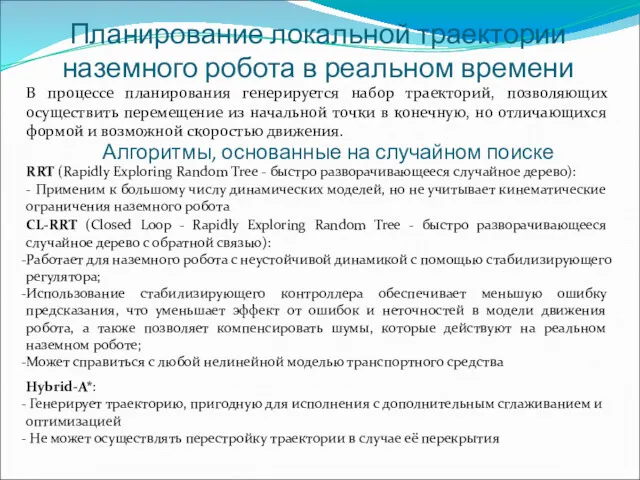
Планирование локальной траектории наземного робота в реальном времени
В процессе планирования генерируется
Планирование локальной траектории наземного робота в реальном времени
В процессе планирования генерируется
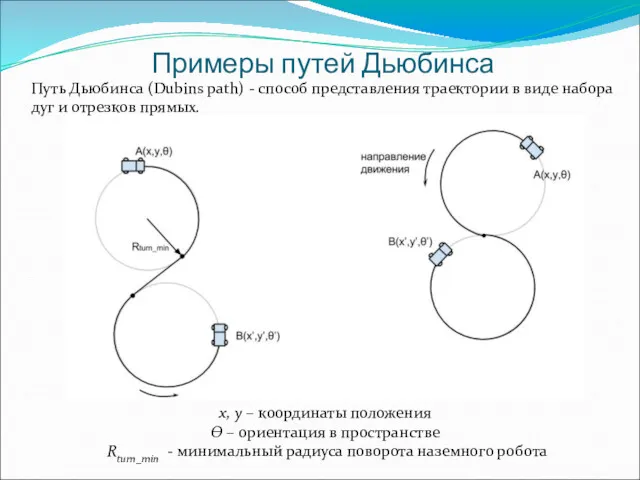
Примеры путей Дьюбинса
Путь Дьюбинса (Dubins path) - способ представления траектории в
Примеры путей Дьюбинса
Путь Дьюбинса (Dubins path) - способ представления траектории в
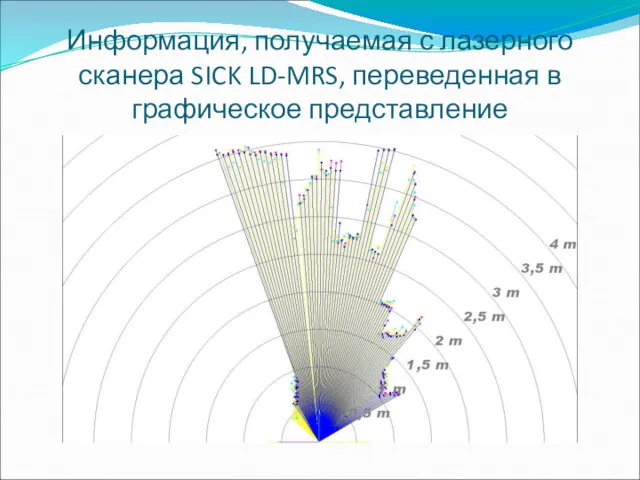
Информация, получаемая с лазерного сканера SICK LD-MRS, переведенная в графическое представление
Информация, получаемая с лазерного сканера SICK LD-MRS, переведенная в графическое представление
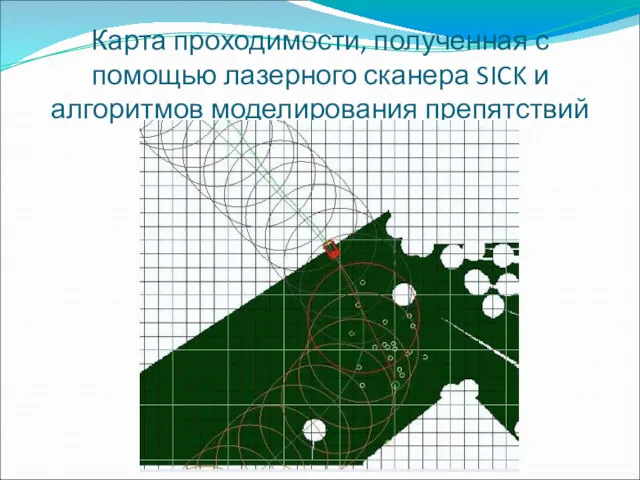
Карта проходимости, полученная с помощью лазерного сканера SICK и алгоритмов моделирования
Карта проходимости, полученная с помощью лазерного сканера SICK и алгоритмов моделирования
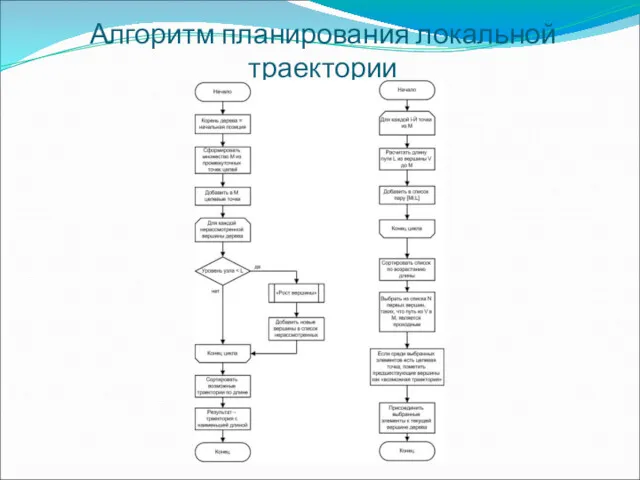
Алгоритм планирования локальной траектории
Алгоритм планирования локальной траектории
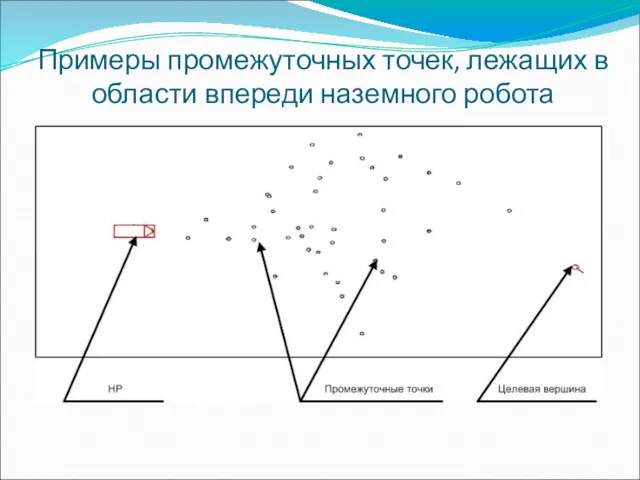
Примеры промежуточных точек, лежащих в области впереди наземного робота
Примеры промежуточных точек, лежащих в области впереди наземного робота
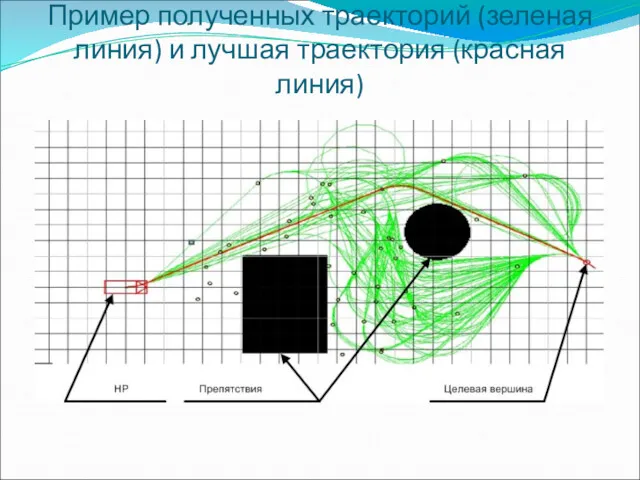
Пример полученных траекторий (зеленая линия) и лучшая траектория (красная линия)
Пример полученных траекторий (зеленая линия) и лучшая траектория (красная линия)

Взаимосвязь блоков программного обеспечения для моделирования движения мобильного робота
Компьютер 1 -
Взаимосвязь блоков программного обеспечения для моделирования движения мобильного робота
Компьютер 1 -
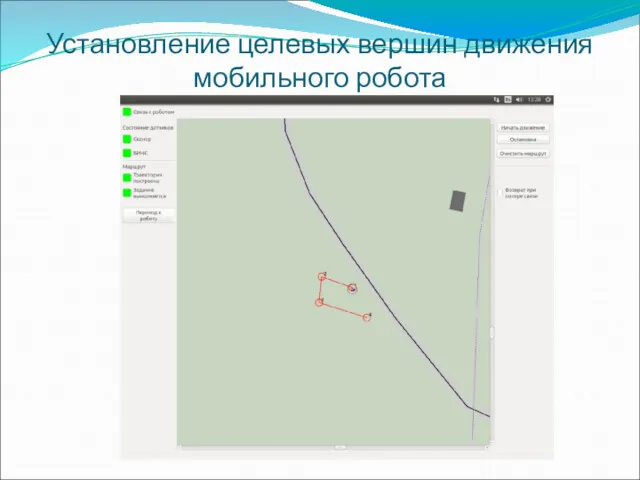
Установление целевых вершин движения мобильного робота
Установление целевых вершин движения мобильного робота

Структурированная местность с отображением различных препятствий и движение мобильного робота по
Структурированная местность с отображением различных препятствий и движение мобильного робота по
 Название темы презентации. Шаблон
Название темы презентации. Шаблон Fast Frequency and Response Measurements using FFTs
Fast Frequency and Response Measurements using FFTs Рак щитовидной железы
Рак щитовидной железы Марксизм. Сущность и этапы марксизма
Марксизм. Сущность и этапы марксизма Маркетинговые исследования. Эксперимент
Маркетинговые исследования. Эксперимент Презентация. Развитие связной речи. Тема Осенью в лесу
Презентация. Развитие связной речи. Тема Осенью в лесу Горьковское отделение Российских железных дорог
Горьковское отделение Российских железных дорог Силовая схема и аппараты электропоездов ЭД4М и ЭП2Д. Схемы 1
Силовая схема и аппараты электропоездов ЭД4М и ЭП2Д. Схемы 1 Литературный глобус С книгой вокруг света
Литературный глобус С книгой вокруг света Семья. Семейное хозяйство
Семья. Семейное хозяйство Доказательства эволюции
Доказательства эволюции Инструментальные методы исследования
Инструментальные методы исследования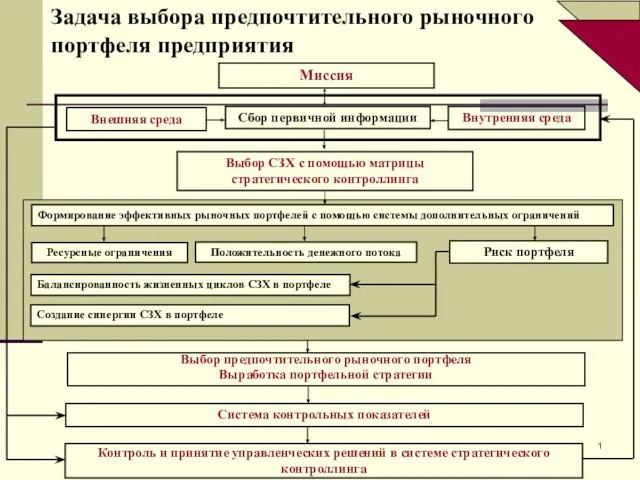 Задача выбора предпочтительного рыночного портфеля предприятия
Задача выбора предпочтительного рыночного портфеля предприятия Предмет и задачи агрометеорологии
Предмет и задачи агрометеорологии Принципы анализа ЭЭГ, эпилепсия
Принципы анализа ЭЭГ, эпилепсия Серологические реакции и вирусологическое исследование
Серологические реакции и вирусологическое исследование Презентация Россия-наша Родина
Презентация Россия-наша Родина Своя игра 5-6 классы
Своя игра 5-6 классы Исследовательский проект Тайны светового луча
Исследовательский проект Тайны светового луча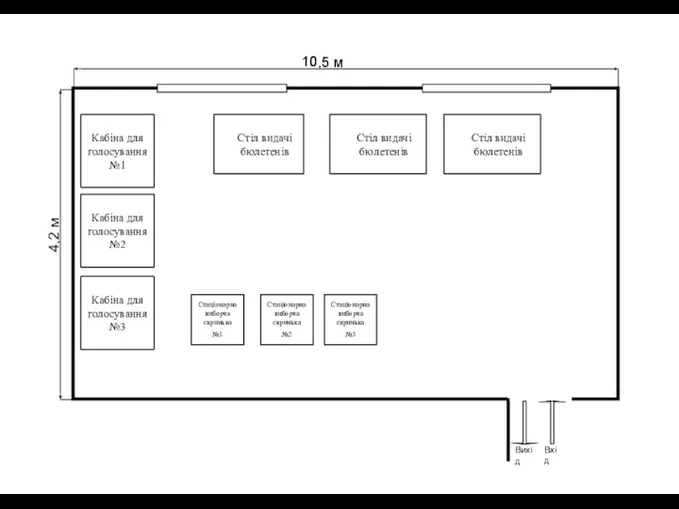 План приміщення для голосування
План приміщення для голосування Psr Morava
Psr Morava Отдел МВД России по Усть-Катавскому городскому округу. Дети России 2018
Отдел МВД России по Усть-Катавскому городскому округу. Дети России 2018 Формирование современной городской среды в Мошенском сельском поселении
Формирование современной городской среды в Мошенском сельском поселении тигренок
тигренок Поджелудочная железа
Поджелудочная железа Подготовка скважин к ремонту
Подготовка скважин к ремонту Презентация Сенсорное воспитание детей старшего дошкольного возраста
Презентация Сенсорное воспитание детей старшего дошкольного возраста Административное право как отрасль российского права
Административное право как отрасль российского права