- Системы Автоматизации Управления Воздушным Движением

Содержание
- 2. ИСТОРИЯ РАЗВИТИЯ АС УВД 50-е года: Начинают эксплуатироваться первые РЛК Созданы первые ЦВМ 60-е года: ARTS
- 3. УРОВНИ АВТОМАТИЗАЦИИ ПРОЦЕССОВ УВД 1 уровень Получение, обработка и отображение данных ПРЛ и ВРЛ Обеспечение непрерывного
- 4. ВЕРСИИ СИСТЕМ АВТОМАТИЗАЦИИ УВД ООО «Фирма НИТА» Система отображения на растровых мониторах «НОРД» КСА УВД «АЛЬФА»
- 5. З А К А З З А П Ч А С Т ей Анализ проб-лем Р
- 6. Технология разработок
- 7. ФУНКЦИИ ПЕРСОНАЛА СОПРОВОЖДЕНИЯ Процесс сопровождения Персонал сопровождения Процесс усовершенствования Процесс управления Процесс обучения Процесс адаптации Процесс
- 8. АРАС УВД «Альфа» Предназначена для оснащения центров УВД с высокой и средней интенсивностью АРАС УВД «АЛЬФА»
- 9. КСА ПВД «Планета» Тренажер Оборудование УВД Районный центр АДЦ и КДП СКРС «Мегафон» ПАК «Консультант» Технический
- 10. ОБОРУДОВАНИЕ СИСТЕМЫ «АЛЬФА»
- 11. ОБЩИЕ СВЕДЕНИЯ Принципы построения Основные характеристики Состав КСА УВД «АЛЬФА» Источники информации Преобразование радиолокационной информации Модуль
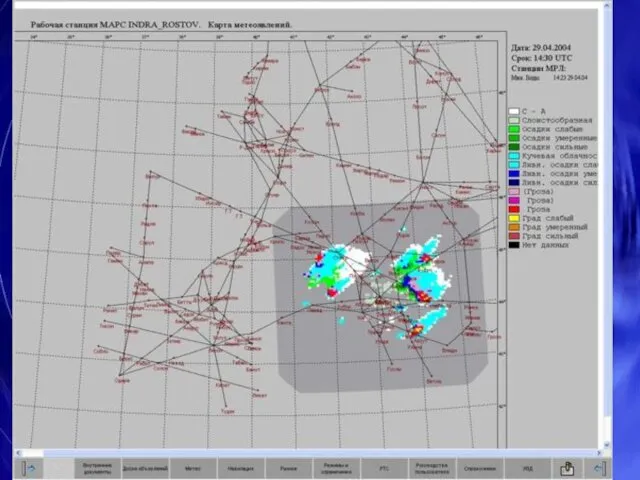
- 12. Подсистема обеспечения метеорологической информации Подсистема обработки и отображения информации Подсистема связи и передачи данных Подсистема обработки
- 13. ОБРАБОТКА ИНФОРМАЦИИ В АС УВД
- 14. ПРИНЦИПЫ ПОСТРОЕНИЯ АРАС УВД «АЛЬФА» АС УВД рассматривается как информационная система (ИС) Вся информация предоставляется в
- 15. СТРУКТУРНАЯ СХЕМА АРАС УВД «АЛЬФА»
- 16. ПРОГРАММНОЕ ОБЕСПЕЧЕНИЕ АРАС УВД «АЛЬФА» операционная системы Windows NT/XP, OC МСВС; основные языки программирования С\С++; стандартное
- 17. СИСТЕМА ПЛАНИРОВАНИЯ “ПЛАНЕТА” СЕРВЕР АФТН АДП СДП ДПП РЦ РЦ ДПП СДП АДП
- 18. АРМ СЕТИ АФТН «ЭКСПРЕСС»
- 19. СИСТЕМА ПРОЕКТИРОВАНИЯ СТРУКТУРЫ ВП
- 20. СТРУКТУРА ПАК Консультант
- 25. СОПРЯЖЕНИЕ С РТС (РЛС, АРМ, РСБН, ПРЛС) КОЛИЧЕСТВО СОПРОВОЖДАЕМЫХ ЦЕЛЕЙ РЕЖИМЫ ПРЕДСТАВЛЕНИЯ ИНФОРМАЦИИ О ВО ЧИСЛО
- 26. ИСТОЧНИКИ ИНФОРМАЦИИ В СИСТЕМЕ Источниками полетной информации могут являться все типы радиолокационных станций, спутниковые системы навигации
- 27. СТРУКТУРА СИСТЕМЫ КСА УВД «АЛЬФА» выполняет : Функции по сбору и преобразованию: данных о ВО (РЛ,
- 28. модуль централизованной обработки; модуль преобразования РЛ-информации; модуль распределения исходных сигналов РЛС; коммуникационное оборудование. СТРУКТУРА ГРУППОВОГО ОБОРУДОВАНИЯ
- 29. Модуль централизованной обработки является сервером РЛИ Для обеспечения безопасности используется два комплекта серверов: основной и резервный.
- 30. МОДУЛЬ ПРЕОБРАЗОВАНИЯ РЛ-ИНФОРМАЦИИ Состав модуля преобразования РЛ-информации: скан-конвертер (по одному на каждый ПРЛ) трехканальный АЦП преобразует
- 31. Модуль преобразования РЛ-информации формирует кодограммы следующих типов: Кодограмма севера; Кодограмма оцифрованной аналоговой (первичной и/или вторичной) координатной
- 32. Системные шины данных Последовательный порт RS-232 СПОСОБЫ ВВОДА ИНФОРМАЦИИ В ПК
- 33. Внутренний - системные шины данных: ISA (Industry Standard Architecture) Работает на частоте 8 МГц, что соответствует
- 34. РЛС: 1РЛ-139, Иртыш, Скала, ЭКРАН-85 - скан-конвертер Радуга – сигналы сразу на вход СОМ1, СОМ2 (RS232)
- 35. ПРИНЦИП ФОРМИРОВАНИЯ «СЫРОГО» ВИДЕО НА ДИСПЛЕЕ
- 36. Форма оцифровки 1024 байта – т.е. весь луч делиться на 1024 точки. Разрешающая способность по дальности
- 37. Посылка вторичной координатной и полетной информации собирается в пакет размером 28 байт. Каждый пакет имеет номер.
- 38. МАГАЗИННЫЙ ПРИНЦИП СБОРКИ БЛОКА ПАКЕТАМИ РЛ-ДАННЫХ
- 39. ПОТРЕБНАЯ ПРОПУСКНАЯ СПОСОБНОСТЬ 1РЛ-139 Кол-во лучей – 4096 Луч – 1026 байт Потребная ПС – 4096х1026/19,1
- 40. АЛГОРИТМ СЖАТИЯ РЛ-ИНФОРМАЦИИ (RLE)
- 41. СПОСОБЫ ДОСТАВКИ ПАКЕТОВ В СЕТИ Адресный (Point-To -Point) Обеспечивается 100% доставка пакетов Высокая загрузка сети не
- 42. Для передачи РЛ-информации используется два способа: Синхронный. В этом режиме явно обозначаются только границы всего передаваемого
- 43. СТРУКТУРА СИСТЕМЫ ОБСЛУЖИВАНИЯ РЛ-ИНФОРМАЦИИ Уровень пользователя Уровень доступа ко всему АО, прерываниям Низкоуровневые операции ввода-вывода и
- 44. АЛГОРИТМ РАБОТЫ ДРАЙВЕРОВ
- 45. Индивидуальное оборудование осуществляет: прием радиолокационной информации от ГО; отображение полученной радиолокационной информации. Структура индивидуального оборудования: модуль
- 46. Модуль отображения КСА УВД «АЛЬФА» воспроизводит: Первичную координатную информацию в: оцифрованной аналоговой форме. Вторичную координатную и
- 47. ЗАДАЧИ МОДУЛЯ ОТОБРАЖЕНИЯ РЛ-ИНФОРМАЦИИ Прием РЛ-данных от серверов системы; Прием данных от устройства сопряжения с радиопеленгатором;
- 48. IBM-совместимый ПК; SVGA-монитор, от 51 см (20 дюймов) и выше, от 1024х768 пикселов и выше; Источник
- 49. Реакция системы на сложившиеся условия: Сигнализация события (сложившихся условий) c выдачей соответствующих расчетов и параметров. Выдача
- 50. Сигнализация событий : прогнозирование ВО и сигнализация ПКС/КС между ВС; обнаружение и сигнализация о достижении МБВ;
- 51. Автоматизации принятия решений : согласование условий входа/выхода ВС между смежными диспетчерскими пунктами; расчет и предложение оптимальной
- 52. ПРОЦЕДУРА OLDI Назначение: Процедура OLDI (On-line data interchange) предназначена для проведения безголосовых (электронных) процедур согласования и
- 53. поддержка данной технологии в смежных центрах КСА УВД и КСА ПВД; наличие специального оборудования обеспечения соединения
- 54. ФУНКЦИОНАЛЬНАЯ СХЕМА OLDI
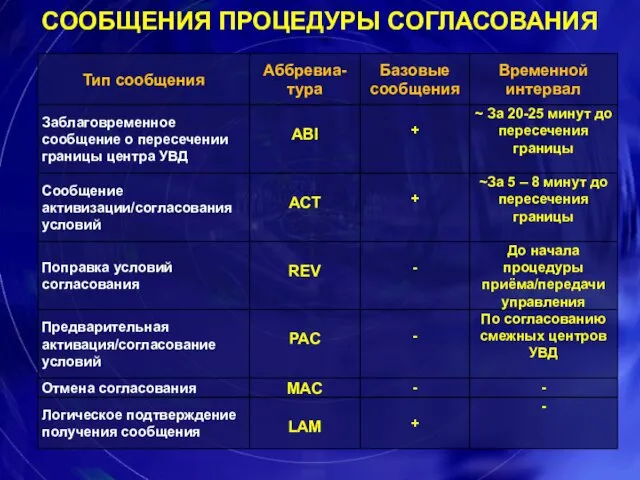
- 55. Для выполнения задач электронного согласования и приёма/передачи управления существуют 4 различные по сложности процедуры OLDI: Основная
- 56. Для выполнения задач электронного согласования и приёма/передачи управления существуют 4 различные по сложности процедуры OLDI: Основная
- 57. СООБЩЕНИЯ ПРОЦЕДУРЫ СОГЛАСОВАНИЯ
- 58. СООБЩЕНИЯ - ABI
- 59. СООБЩЕНИЯ - ACT
- 60. АКТИВАЦИЯ РЕЙСА ПРИ НАЛИЧИИ РЛИ
- 61. ИЗМЕНЕНИЕ УСЛОВИЙ СОГЛАСОВАНИЯ
- 62. ИЗМЕНЕНИЕ УСЛОВИЙ СОГЛАСОВАНИЯ
- 63. ВС В ЗОНЕ ОТВЕТСТВЕННОСТИ ПУНКТА УВД
- 64. СООБЩЕНИЕ ABI БЕЗ ПОДТВЕРЖДЕНИЯ LAM
- 65. ПОЛУЧЕНИЕ ПОДТВЕРЖДЕНИЯ LAM
- 66. НЕ СОВПАДЕНИЕ ДАННЫХ OLDI И ФПЛ
- 68. Скачать презентацию
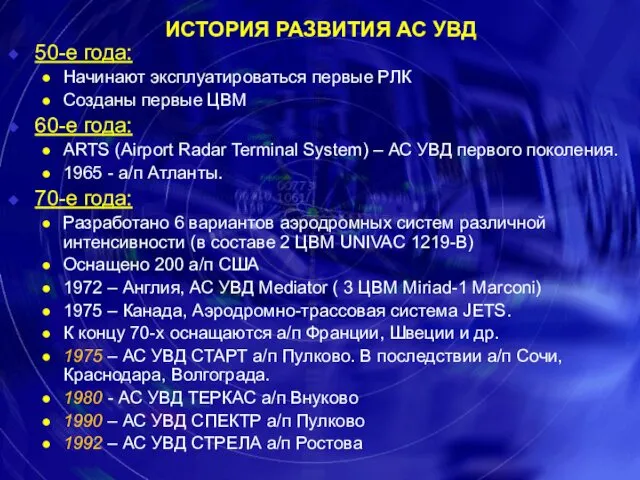
ИСТОРИЯ РАЗВИТИЯ АС УВД
50-е года:
Начинают эксплуатироваться первые РЛК
Созданы первые ЦВМ
60-е года:
ARTS
ИСТОРИЯ РАЗВИТИЯ АС УВД
50-е года:
Начинают эксплуатироваться первые РЛК
Созданы первые ЦВМ
60-е года:
ARTS
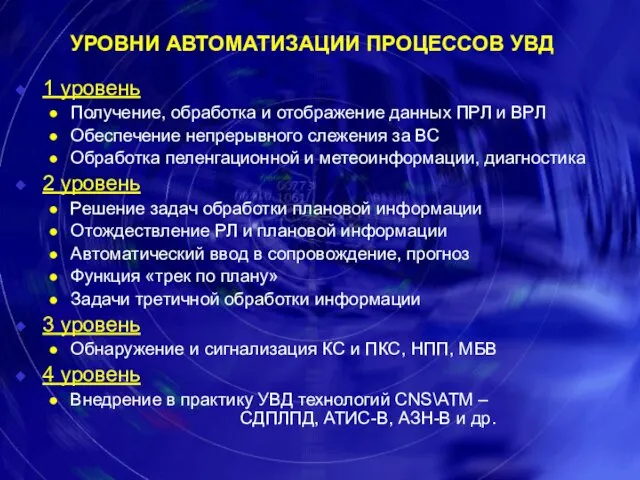
УРОВНИ АВТОМАТИЗАЦИИ ПРОЦЕССОВ УВД
1 уровень
Получение, обработка и отображение данных ПРЛ и
УРОВНИ АВТОМАТИЗАЦИИ ПРОЦЕССОВ УВД
1 уровень
Получение, обработка и отображение данных ПРЛ и
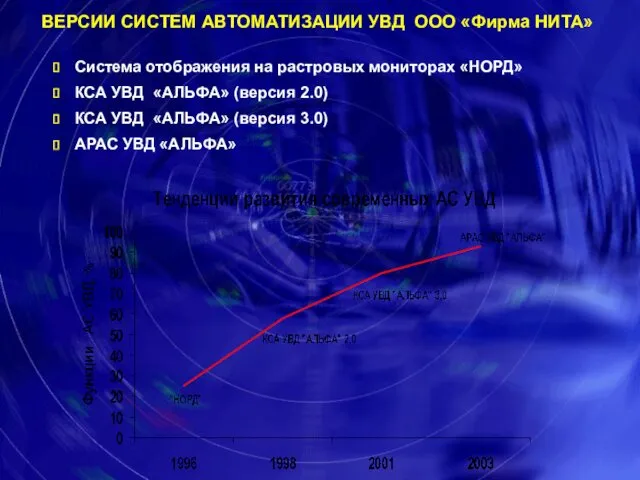
ВЕРСИИ СИСТЕМ АВТОМАТИЗАЦИИ УВД ООО «Фирма НИТА»
Система отображения на растровых мониторах
ВЕРСИИ СИСТЕМ АВТОМАТИЗАЦИИ УВД ООО «Фирма НИТА»
Система отображения на растровых мониторах
З
А
К
А
З
З
А
П
Ч
А
С
Т
ей
Анализ
проб-лем
Р
А
З
Р
А
Б
О
Т
К
А
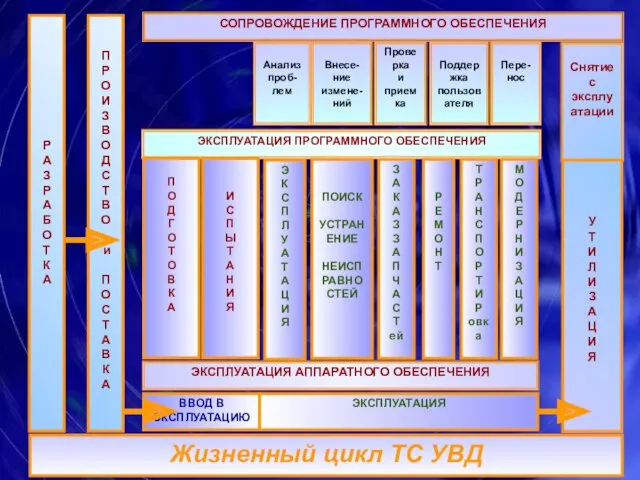
СОПРОВОЖДЕНИЕ ПРОГРАММНОГО ОБЕСПЕЧЕНИЯ
П
Р
О
И
З
В
О
Д
С
Т
В
О
и
П
О
С
Т
А
В
К
А
Внесе-ние
измене-ний
Проверка
и приемка
Поддержка
пользователя
Пере-нос
Снятие
с
эксплуатации
ЭКСПЛУАТАЦИЯ ПРОГРАММНОГО ОБЕСПЕЧЕНИЯ
П
О
Д
Г
О
Т
О
В
К
А
И
С
П
Ы
Т
А
Н
И
Я
Э
К
С
П
Л
У
А
Т
А
Ц
И
Я
ПОИСК
УСТРАНЕНИЕ
НЕИСПРАВНОСТЕЙ
Р
Е
М
О
Н
Т
Т
Р
А
Н
С
П
О
Р
Т
И
Р
овка
У
Т
И
Л
И
З
А
Ц
И
Я
ЭКСПЛУАТАЦИЯ АППАРАТНОГО ОБЕСПЕЧЕНИЯ
ВВОД
З
А
К
А
З
З
А
П
Ч
А
С
Т
ей
Анализ
проб-лем
Р
А
З
Р
А
Б
О
Т
К
А
СОПРОВОЖДЕНИЕ ПРОГРАММНОГО ОБЕСПЕЧЕНИЯ
П
Р
О
И
З
В
О
Д
С
Т
В
О
и
П
О
С
Т
А
В
К
А
Внесе-ние
измене-ний
Проверка
и приемка
Поддержка
пользователя
Пере-нос
Снятие
с
эксплуатации
ЭКСПЛУАТАЦИЯ ПРОГРАММНОГО ОБЕСПЕЧЕНИЯ
П
О
Д
Г
О
Т
О
В
К
А
И
С
П
Ы
Т
А
Н
И
Я
Э
К
С
П
Л
У
А
Т
А
Ц
И
Я
ПОИСК
УСТРАНЕНИЕ
НЕИСПРАВНОСТЕЙ
Р
Е
М
О
Н
Т
Т
Р
А
Н
С
П
О
Р
Т
И
Р
овка
У
Т
И
Л
И
З
А
Ц
И
Я
ЭКСПЛУАТАЦИЯ АППАРАТНОГО ОБЕСПЕЧЕНИЯ
ВВОД
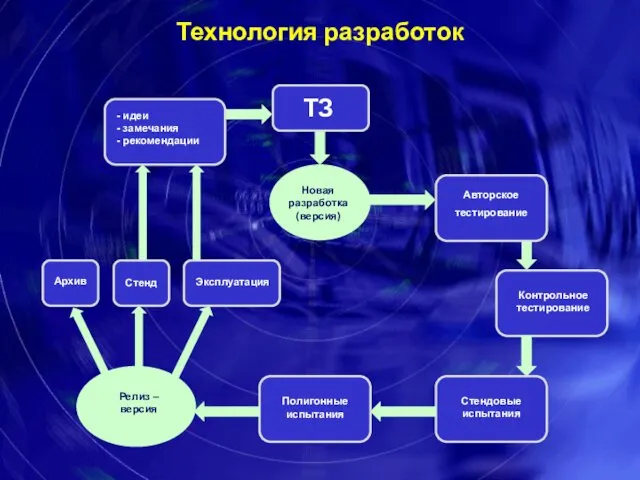
Технология разработок
Технология разработок

ФУНКЦИИ ПЕРСОНАЛА СОПРОВОЖДЕНИЯ
Процесс сопровождения
Персонал сопровождения
Процесс усовершенствования
Процесс управления
Процесс обучения
Процесс адаптации
Процесс создания инфраструктуры
Процесс
ФУНКЦИИ ПЕРСОНАЛА СОПРОВОЖДЕНИЯ
Процесс сопровождения
Персонал сопровождения
Процесс усовершенствования
Процесс управления
Процесс обучения
Процесс адаптации
Процесс создания инфраструктуры
Процесс
АРАС УВД «Альфа»
Предназначена для оснащения центров УВД
с высокой и
АРАС УВД «Альфа»
Предназначена для оснащения центров УВД с высокой и
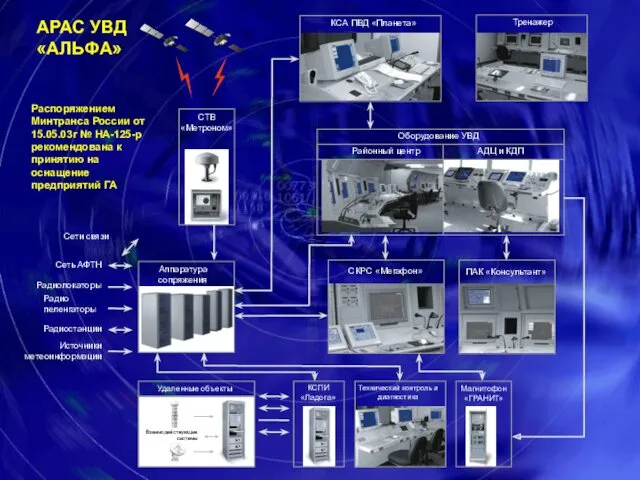
КСА ПВД «Планета»
Тренажер
Оборудование УВД
Районный центр
АДЦ и КДП
СКРС «Мегафон»
ПАК «Консультант»
Технический контроль и
КСА ПВД «Планета»
Тренажер
Оборудование УВД
Районный центр
АДЦ и КДП
СКРС «Мегафон»
ПАК «Консультант»
Технический контроль и

ОБОРУДОВАНИЕ СИСТЕМЫ «АЛЬФА»
ОБОРУДОВАНИЕ СИСТЕМЫ «АЛЬФА»
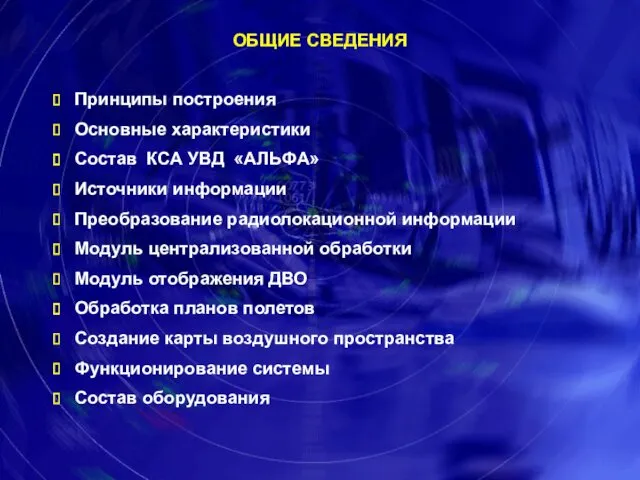
ОБЩИЕ СВЕДЕНИЯ
Принципы построения
Основные характеристики
Состав КСА УВД «АЛЬФА»
Источники информации
Преобразование радиолокационной информации
Модуль централизованной
ОБЩИЕ СВЕДЕНИЯ
Принципы построения
Основные характеристики
Состав КСА УВД «АЛЬФА»
Источники информации
Преобразование радиолокационной информации
Модуль централизованной
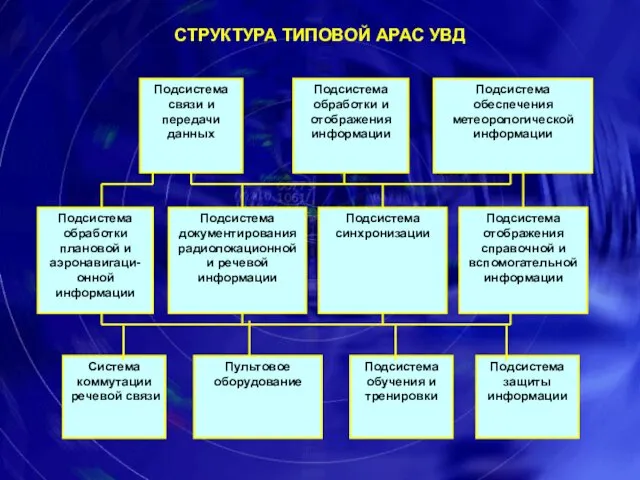
Подсистема обеспечения метеорологической информации
Подсистема
обработки и
отображения информации
Подсистема
связи и
передачи
данных
Подсистема
Подсистема обеспечения метеорологической информации
Подсистема
обработки и
отображения информации
Подсистема
связи и
передачи
данных
Подсистема
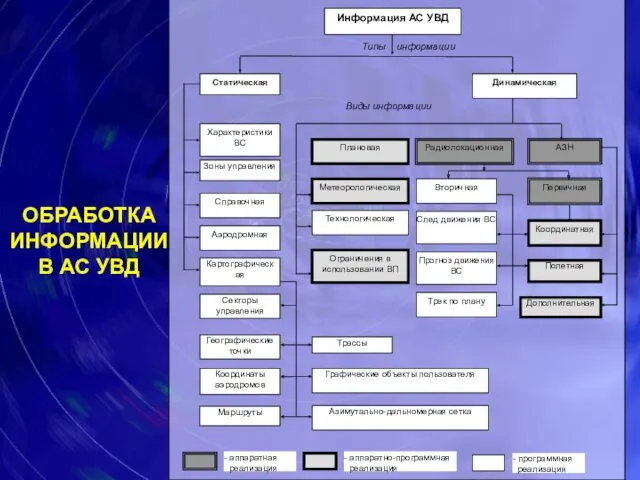
ОБРАБОТКА ИНФОРМАЦИИ В АС УВД
ОБРАБОТКА ИНФОРМАЦИИ В АС УВД
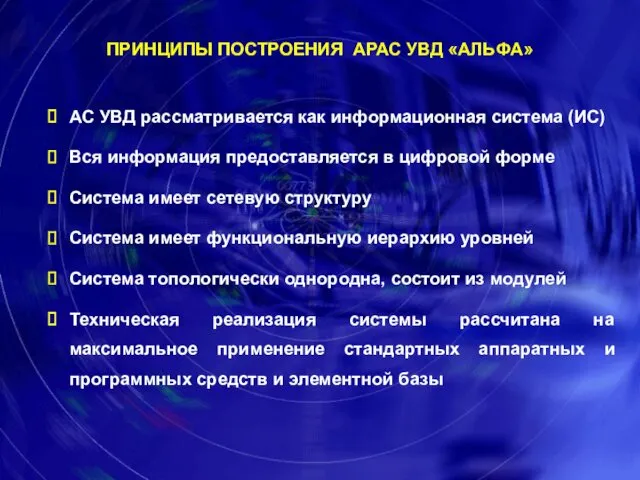
ПРИНЦИПЫ ПОСТРОЕНИЯ АРАС УВД «АЛЬФА»
АС УВД рассматривается как информационная система (ИС)
Вся
ПРИНЦИПЫ ПОСТРОЕНИЯ АРАС УВД «АЛЬФА»
АС УВД рассматривается как информационная система (ИС)
Вся

СТРУКТУРНАЯ СХЕМА АРАС УВД «АЛЬФА»
СТРУКТУРНАЯ СХЕМА АРАС УВД «АЛЬФА»
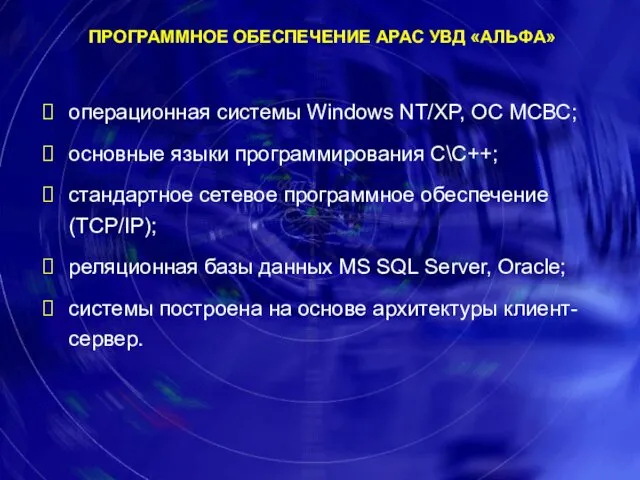
ПРОГРАММНОЕ ОБЕСПЕЧЕНИЕ АРАС УВД «АЛЬФА»
операционная системы Windows NT/XP, OC МСВС;
основные языки
ПРОГРАММНОЕ ОБЕСПЕЧЕНИЕ АРАС УВД «АЛЬФА»
операционная системы Windows NT/XP, OC МСВС;
основные языки
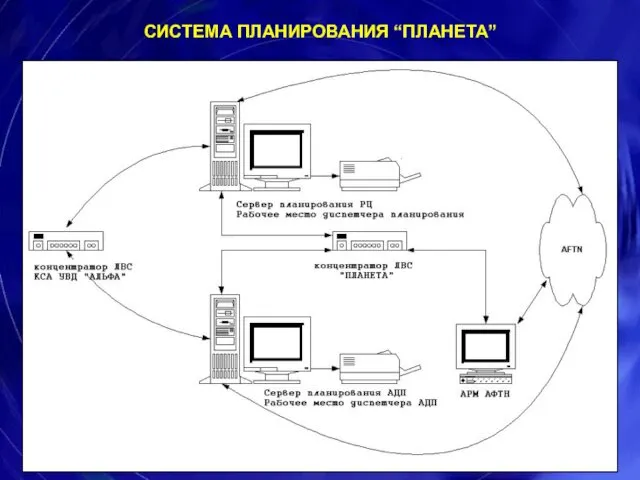
СИСТЕМА ПЛАНИРОВАНИЯ “ПЛАНЕТА”
СЕРВЕР
АФТН
АДП
СДП
ДПП
РЦ
РЦ
ДПП
СДП
АДП
СИСТЕМА ПЛАНИРОВАНИЯ “ПЛАНЕТА”
СЕРВЕР
АФТН
АДП
СДП
ДПП
РЦ
РЦ
ДПП
СДП
АДП
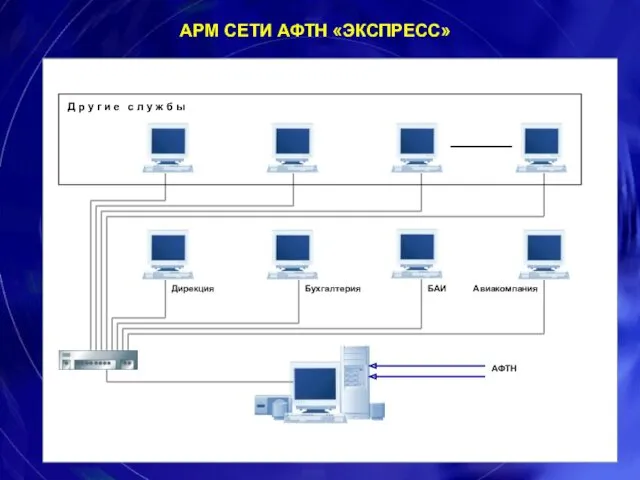
АРМ СЕТИ АФТН «ЭКСПРЕСС»
АРМ СЕТИ АФТН «ЭКСПРЕСС»
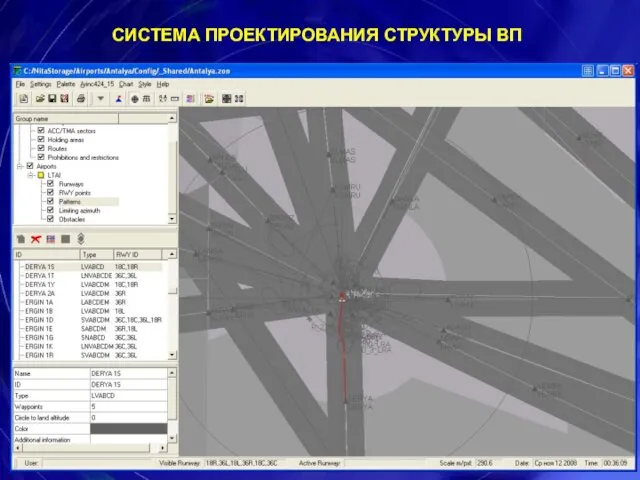
СИСТЕМА ПРОЕКТИРОВАНИЯ СТРУКТУРЫ ВП
СИСТЕМА ПРОЕКТИРОВАНИЯ СТРУКТУРЫ ВП
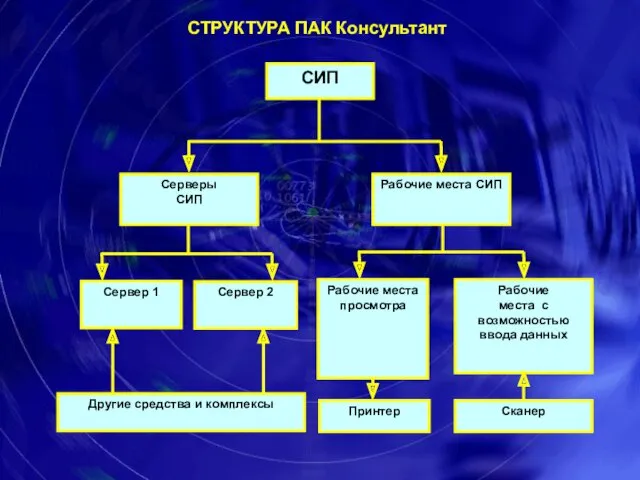
СТРУКТУРА ПАК Консультант
СТРУКТУРА ПАК Консультант

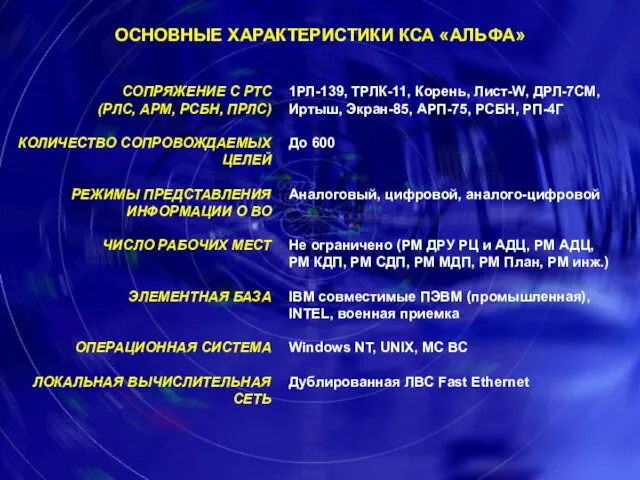
СОПРЯЖЕНИЕ С РТС
(РЛС, АРМ, РСБН, ПРЛС)
КОЛИЧЕСТВО СОПРОВОЖДАЕМЫХ
ЦЕЛЕЙ
РЕЖИМЫ ПРЕДСТАВЛЕНИЯ
СОПРЯЖЕНИЕ С РТС
(РЛС, АРМ, РСБН, ПРЛС)
КОЛИЧЕСТВО СОПРОВОЖДАЕМЫХ
ЦЕЛЕЙ
РЕЖИМЫ ПРЕДСТАВЛЕНИЯ
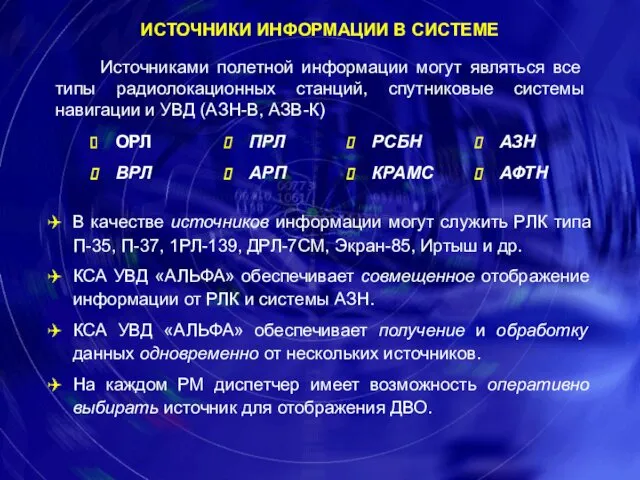
ИСТОЧНИКИ ИНФОРМАЦИИ В СИСТЕМЕ
Источниками полетной информации могут являться все типы
ИСТОЧНИКИ ИНФОРМАЦИИ В СИСТЕМЕ
Источниками полетной информации могут являться все типы

СТРУКТУРА СИСТЕМЫ
КСА УВД «АЛЬФА» выполняет :
Функции по сбору и преобразованию:
СТРУКТУРА СИСТЕМЫ
КСА УВД «АЛЬФА» выполняет :
Функции по сбору и преобразованию:
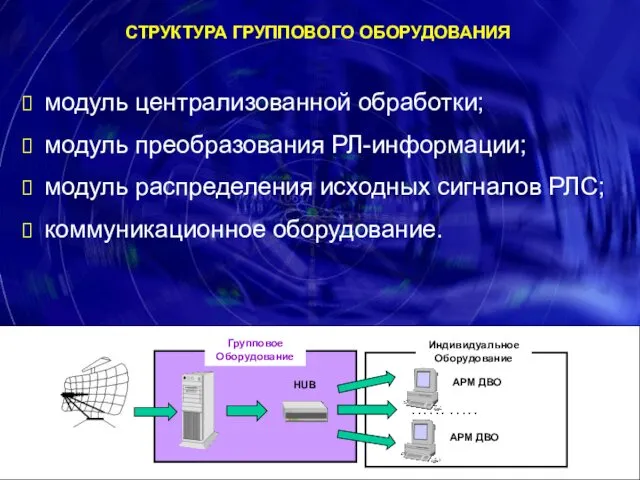
модуль централизованной обработки;
модуль преобразования РЛ-информации;
модуль распределения исходных сигналов РЛС;
коммуникационное оборудование.
СТРУКТУРА
модуль централизованной обработки;
модуль преобразования РЛ-информации;
модуль распределения исходных сигналов РЛС;
коммуникационное оборудование.
СТРУКТУРА
Модуль централизованной обработки является сервером РЛИ
Для обеспечения безопасности используется
Модуль централизованной обработки является сервером РЛИ
Для обеспечения безопасности используется
МОДУЛЬ ПРЕОБРАЗОВАНИЯ РЛ-ИНФОРМАЦИИ
Состав модуля преобразования РЛ-информации:
скан-конвертер (по одному на каждый
МОДУЛЬ ПРЕОБРАЗОВАНИЯ РЛ-ИНФОРМАЦИИ
Состав модуля преобразования РЛ-информации:
скан-конвертер (по одному на каждый
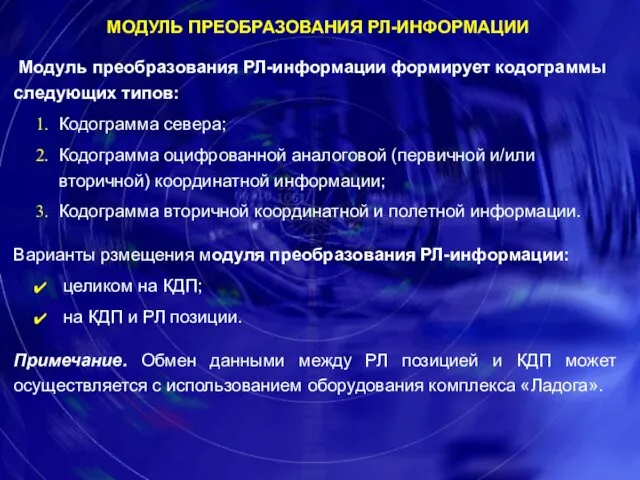
Модуль преобразования РЛ-информации формирует кодограммы следующих типов:
Кодограмма севера;
Кодограмма оцифрованной аналоговой
Модуль преобразования РЛ-информации формирует кодограммы следующих типов:
Кодограмма севера;
Кодограмма оцифрованной аналоговой

Системные шины данных
Последовательный порт RS-232
СПОСОБЫ ВВОДА ИНФОРМАЦИИ В ПК
Системные шины данных
Последовательный порт RS-232
СПОСОБЫ ВВОДА ИНФОРМАЦИИ В ПК
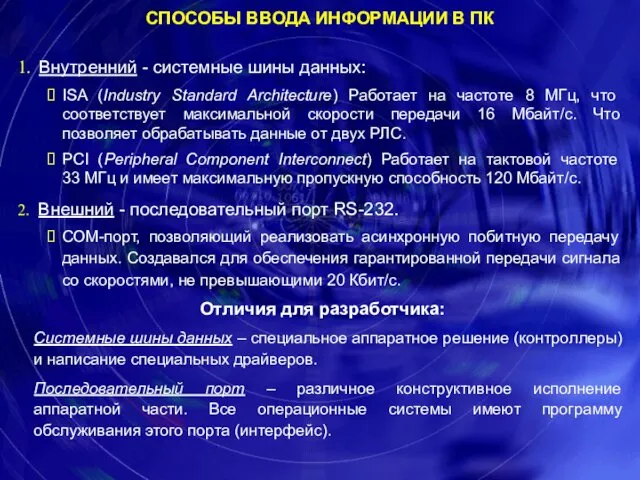
Внутренний - системные шины данных:
ISA (Industry Standard Architecture) Работает на
Внутренний - системные шины данных:
ISA (Industry Standard Architecture) Работает на
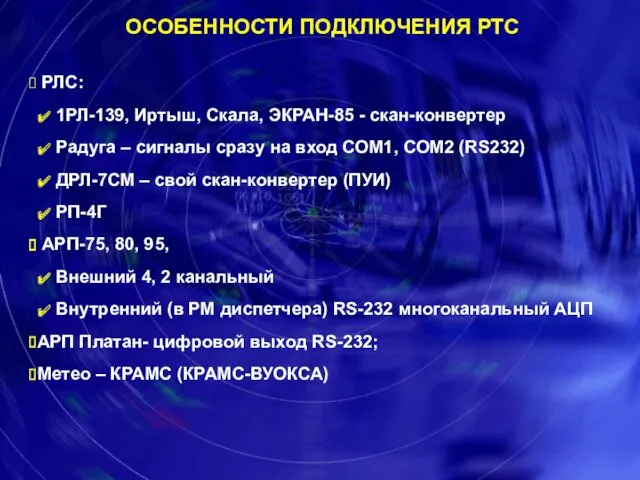
РЛС:
1РЛ-139, Иртыш, Скала, ЭКРАН-85 - скан-конвертер
Радуга – сигналы
РЛС:
1РЛ-139, Иртыш, Скала, ЭКРАН-85 - скан-конвертер
Радуга – сигналы
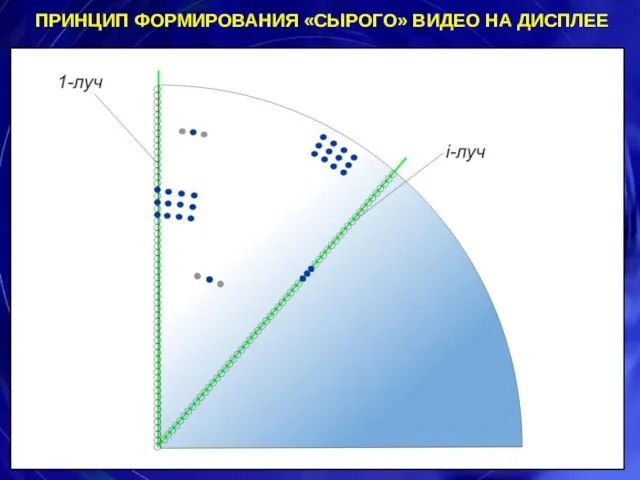
ПРИНЦИП ФОРМИРОВАНИЯ «СЫРОГО» ВИДЕО НА ДИСПЛЕЕ
ПРИНЦИП ФОРМИРОВАНИЯ «СЫРОГО» ВИДЕО НА ДИСПЛЕЕ
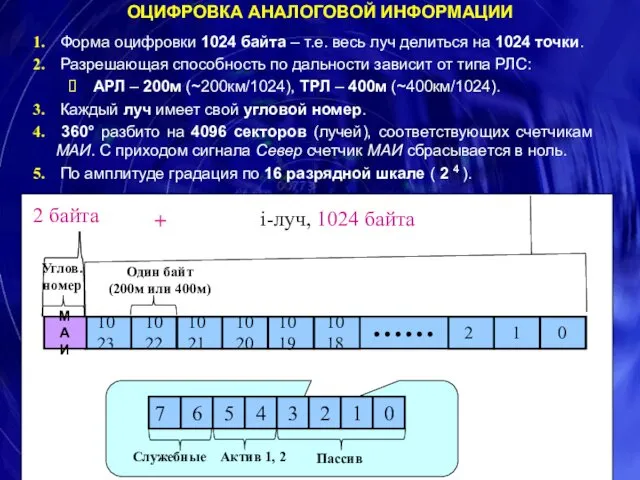
Форма оцифровки 1024 байта – т.е. весь луч делиться на
Форма оцифровки 1024 байта – т.е. весь луч делиться на
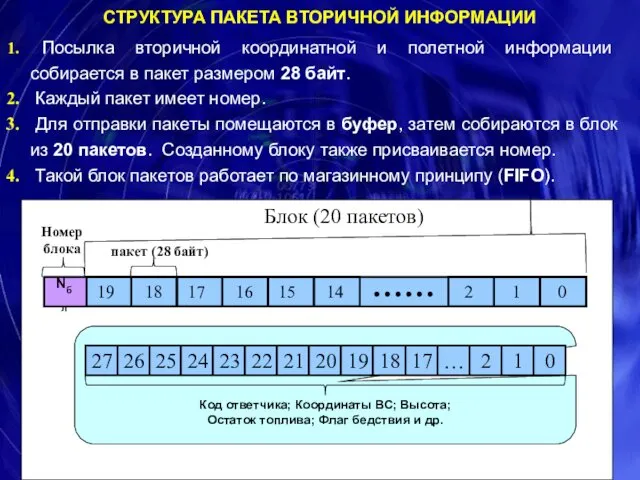
Посылка вторичной координатной и полетной информации собирается в пакет размером
Посылка вторичной координатной и полетной информации собирается в пакет размером
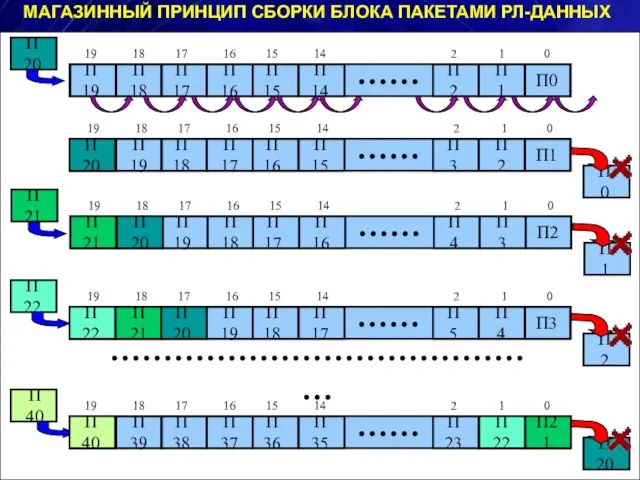
МАГАЗИННЫЙ ПРИНЦИП СБОРКИ БЛОКА ПАКЕТАМИ РЛ-ДАННЫХ
МАГАЗИННЫЙ ПРИНЦИП СБОРКИ БЛОКА ПАКЕТАМИ РЛ-ДАННЫХ
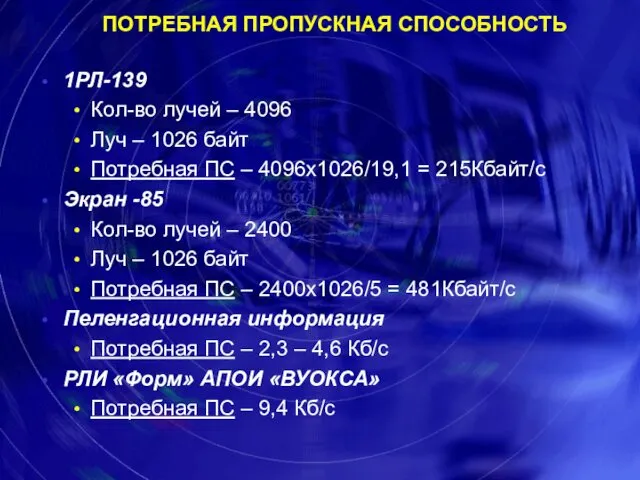
ПОТРЕБНАЯ ПРОПУСКНАЯ СПОСОБНОСТЬ
1РЛ-139
Кол-во лучей – 4096
Луч – 1026 байт
Потребная ПС –
ПОТРЕБНАЯ ПРОПУСКНАЯ СПОСОБНОСТЬ
1РЛ-139
Кол-во лучей – 4096
Луч – 1026 байт
Потребная ПС –
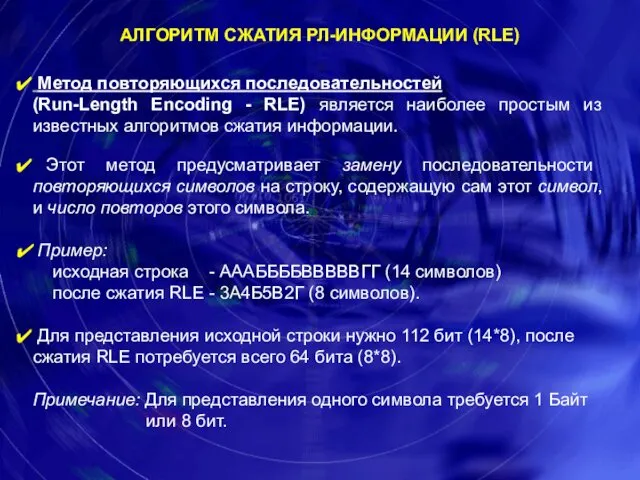
АЛГОРИТМ СЖАТИЯ РЛ-ИНФОРМАЦИИ (RLE)
АЛГОРИТМ СЖАТИЯ РЛ-ИНФОРМАЦИИ (RLE)
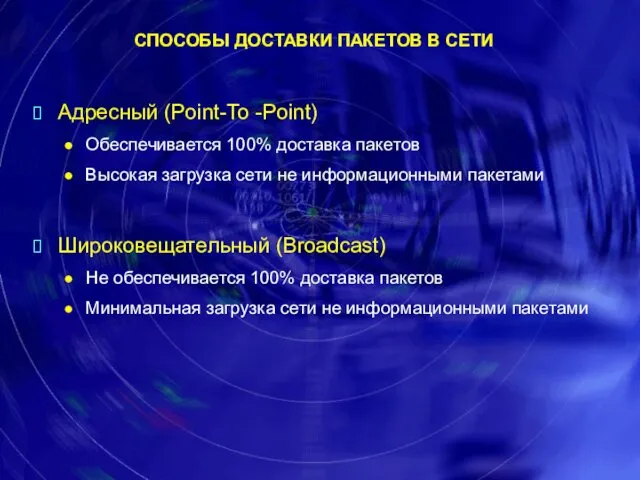
СПОСОБЫ ДОСТАВКИ ПАКЕТОВ В СЕТИ
Адресный (Point-To -Point)
Обеспечивается 100% доставка пакетов
Высокая
СПОСОБЫ ДОСТАВКИ ПАКЕТОВ В СЕТИ
Адресный (Point-To -Point)
Обеспечивается 100% доставка пакетов
Высокая
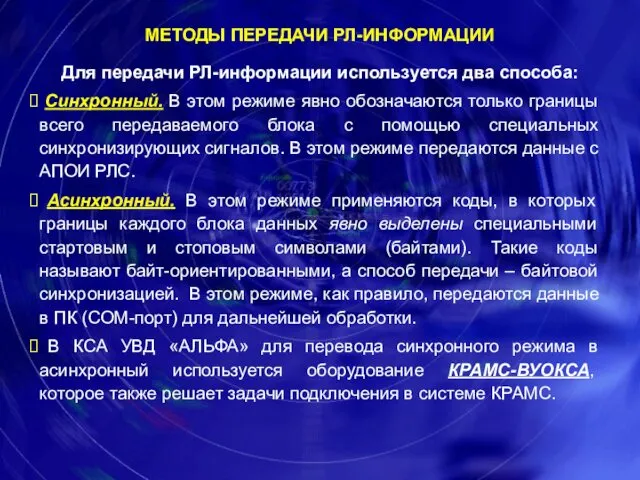
Для передачи РЛ-информации используется два способа:
Синхронный. В этом режиме явно
Для передачи РЛ-информации используется два способа:
Синхронный. В этом режиме явно
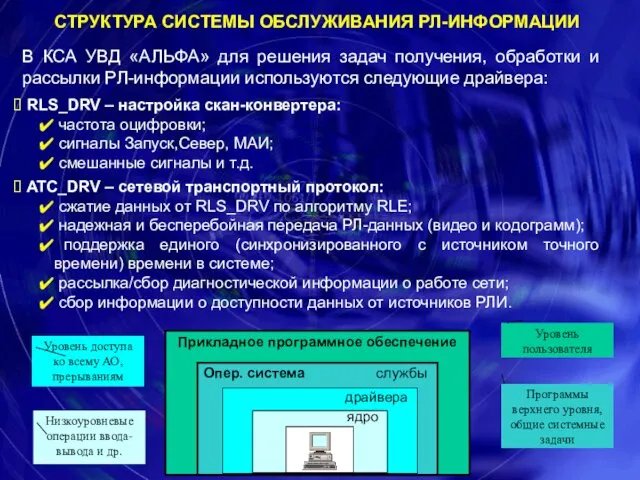
СТРУКТУРА СИСТЕМЫ ОБСЛУЖИВАНИЯ РЛ-ИНФОРМАЦИИ
Уровень пользователя
Уровень доступа ко всему АО, прерываниям
Низкоуровневые
СТРУКТУРА СИСТЕМЫ ОБСЛУЖИВАНИЯ РЛ-ИНФОРМАЦИИ
Уровень пользователя
Уровень доступа ко всему АО, прерываниям
Низкоуровневые
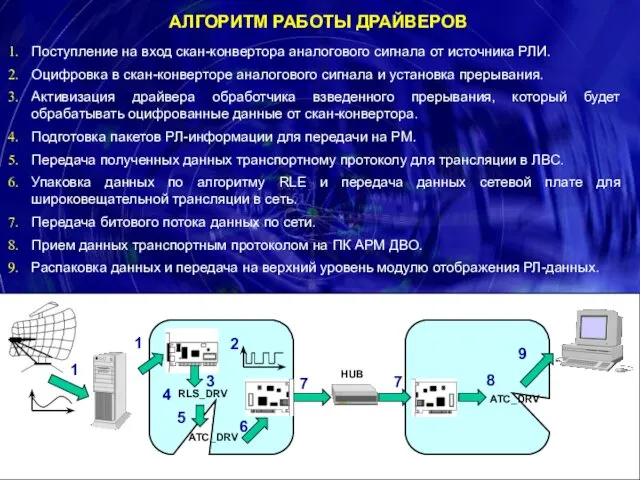
АЛГОРИТМ РАБОТЫ ДРАЙВЕРОВ
АЛГОРИТМ РАБОТЫ ДРАЙВЕРОВ
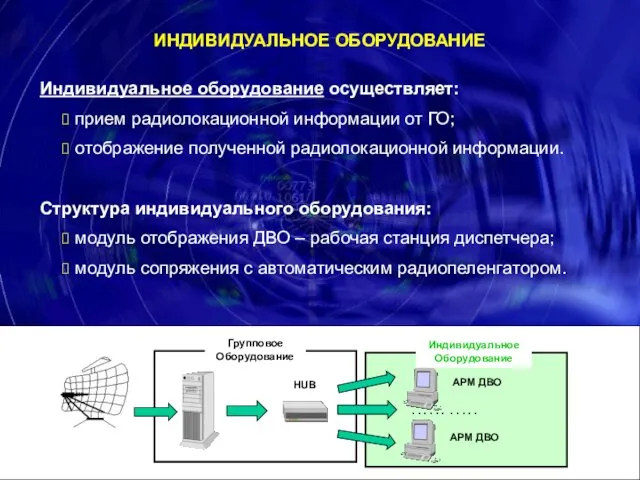
Индивидуальное оборудование осуществляет:
прием радиолокационной информации от ГО;
отображение полученной
Индивидуальное оборудование осуществляет:
прием радиолокационной информации от ГО;
отображение полученной
Модуль отображения КСА УВД «АЛЬФА» воспроизводит:
Первичную координатную информацию в:
оцифрованной аналоговой
Модуль отображения КСА УВД «АЛЬФА» воспроизводит:
Первичную координатную информацию в:
оцифрованной аналоговой
ЗАДАЧИ МОДУЛЯ ОТОБРАЖЕНИЯ РЛ-ИНФОРМАЦИИ
Прием РЛ-данных от серверов системы;
Прием данных от
ЗАДАЧИ МОДУЛЯ ОТОБРАЖЕНИЯ РЛ-ИНФОРМАЦИИ
Прием РЛ-данных от серверов системы;
Прием данных от
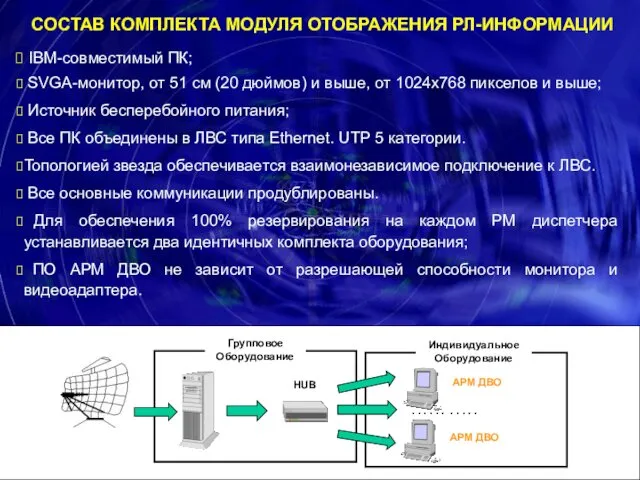
IBM-совместимый ПК;
SVGA-монитор, от 51 см (20 дюймов) и выше,
IBM-совместимый ПК;
SVGA-монитор, от 51 см (20 дюймов) и выше,

Реакция системы на сложившиеся условия:
Сигнализация события (сложившихся условий) c
выдачей
Реакция системы на сложившиеся условия:
Сигнализация события (сложившихся условий) c
выдачей
Сигнализация событий :
прогнозирование ВО и сигнализация ПКС/КС между ВС;
обнаружение
Сигнализация событий :
прогнозирование ВО и сигнализация ПКС/КС между ВС;
обнаружение
Автоматизации принятия решений :
согласование условий входа/выхода ВС между смежными диспетчерскими
Автоматизации принятия решений :
согласование условий входа/выхода ВС между смежными диспетчерскими
ПРОЦЕДУРА OLDI
Назначение: Процедура OLDI (On-line data interchange) предназначена для проведения безголосовых
ПРОЦЕДУРА OLDI
Назначение: Процедура OLDI (On-line data interchange) предназначена для проведения безголосовых
поддержка данной технологии в смежных центрах КСА УВД и КСА
поддержка данной технологии в смежных центрах КСА УВД и КСА
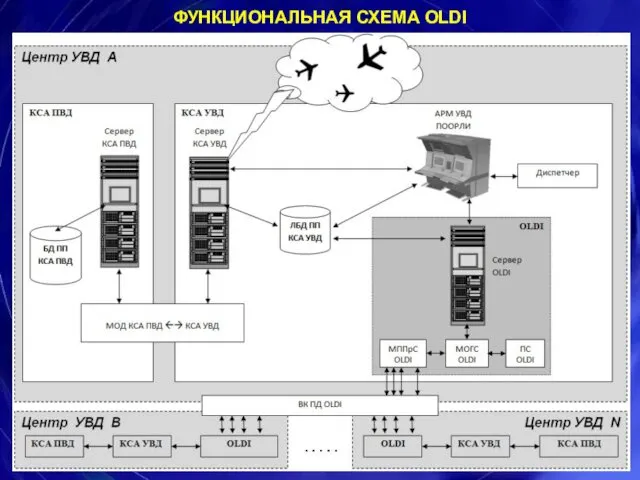
ФУНКЦИОНАЛЬНАЯ СХЕМА OLDI
ФУНКЦИОНАЛЬНАЯ СХЕМА OLDI
Для выполнения задач электронного согласования и приёма/передачи управления существуют 4 различные
Для выполнения задач электронного согласования и приёма/передачи управления существуют 4 различные
Для выполнения задач электронного согласования и приёма/передачи управления существуют 4 различные
Для выполнения задач электронного согласования и приёма/передачи управления существуют 4 различные
СООБЩЕНИЯ ПРОЦЕДУРЫ СОГЛАСОВАНИЯ
СООБЩЕНИЯ ПРОЦЕДУРЫ СОГЛАСОВАНИЯ
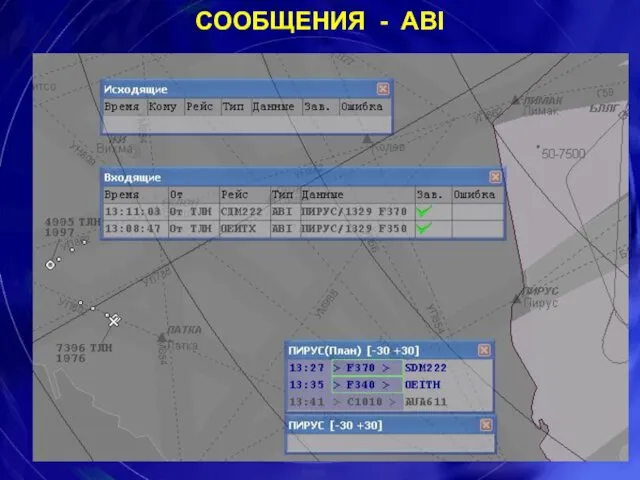
СООБЩЕНИЯ - ABI
СООБЩЕНИЯ - ABI
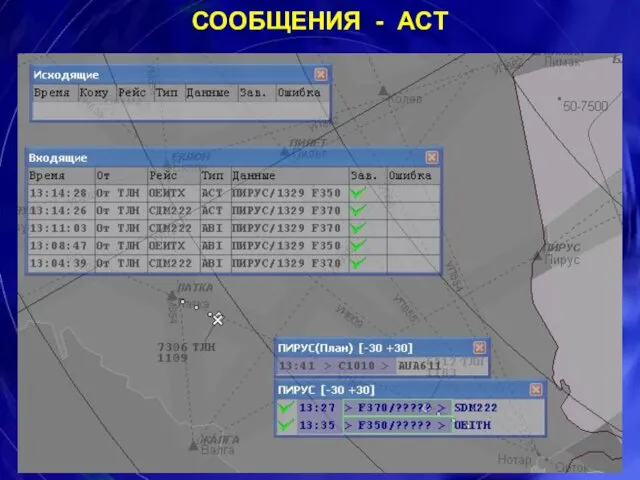
СООБЩЕНИЯ - ACT
СООБЩЕНИЯ - ACT

АКТИВАЦИЯ РЕЙСА ПРИ НАЛИЧИИ РЛИ
АКТИВАЦИЯ РЕЙСА ПРИ НАЛИЧИИ РЛИ
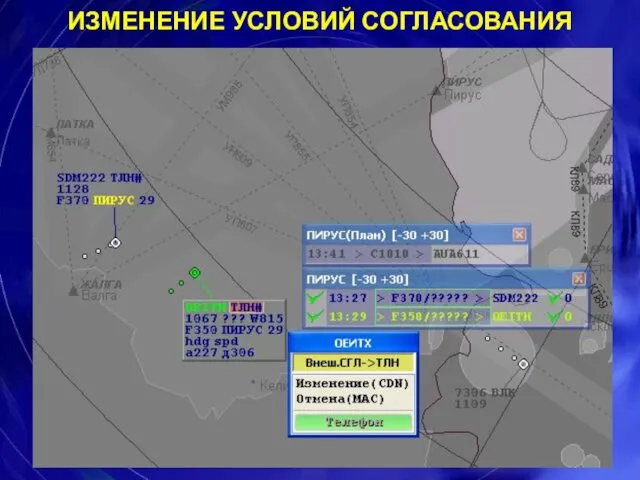
ИЗМЕНЕНИЕ УСЛОВИЙ СОГЛАСОВАНИЯ
ИЗМЕНЕНИЕ УСЛОВИЙ СОГЛАСОВАНИЯ
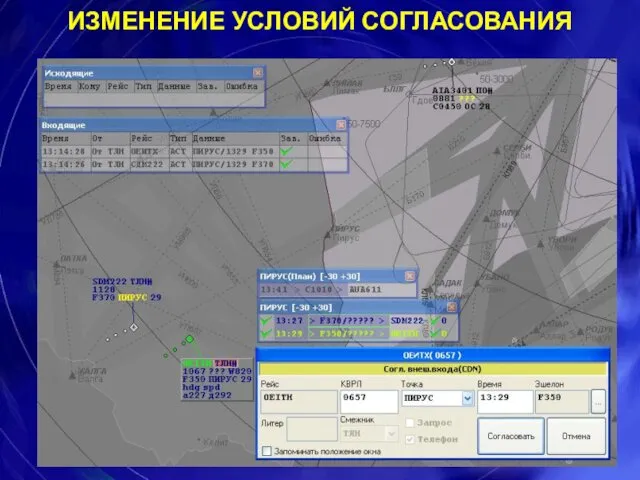
ИЗМЕНЕНИЕ УСЛОВИЙ СОГЛАСОВАНИЯ
ИЗМЕНЕНИЕ УСЛОВИЙ СОГЛАСОВАНИЯ
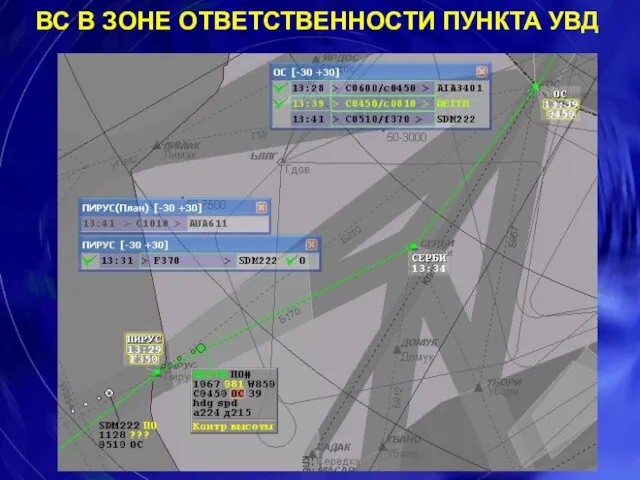
ВС В ЗОНЕ ОТВЕТСТВЕННОСТИ ПУНКТА УВД
ВС В ЗОНЕ ОТВЕТСТВЕННОСТИ ПУНКТА УВД
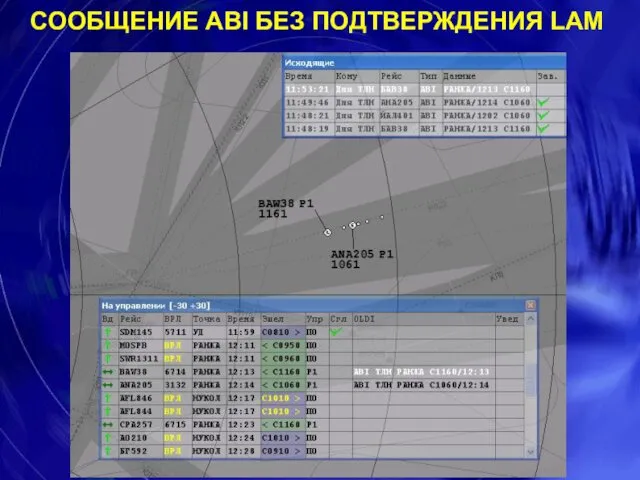
СООБЩЕНИЕ ABI БЕЗ ПОДТВЕРЖДЕНИЯ LAM
СООБЩЕНИЕ ABI БЕЗ ПОДТВЕРЖДЕНИЯ LAM
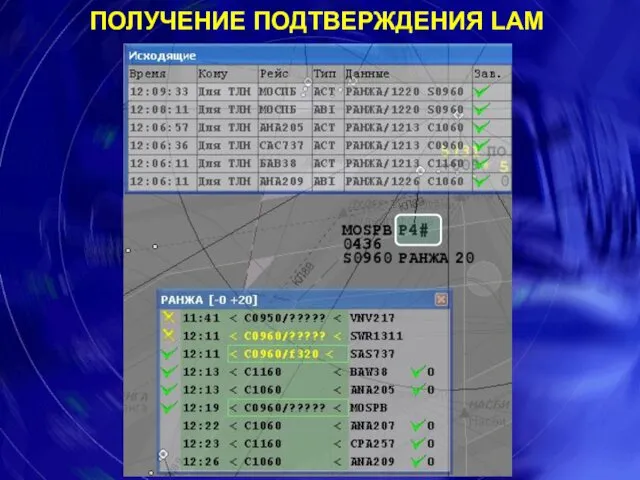
ПОЛУЧЕНИЕ ПОДТВЕРЖДЕНИЯ LAM
ПОЛУЧЕНИЕ ПОДТВЕРЖДЕНИЯ LAM
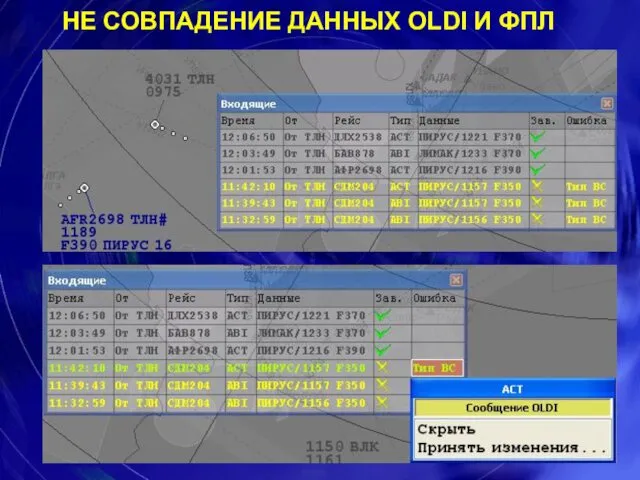
НЕ СОВПАДЕНИЕ ДАННЫХ OLDI И ФПЛ
НЕ СОВПАДЕНИЕ ДАННЫХ OLDI И ФПЛ
 Выбор и проектирование заготовок. Лекция 4. Проектирование литых заготовок
Выбор и проектирование заготовок. Лекция 4. Проектирование литых заготовок Конспект совместной образовательной деятельности воспитателей и детей старшего дошкольного возраста Экскурсия на почтовое отделение(с презентацией)
Конспект совместной образовательной деятельности воспитателей и детей старшего дошкольного возраста Экскурсия на почтовое отделение(с презентацией) ПроектКомпетентность родителей как условие содействия нравственному и эмоциональному благополучию ребенка
ПроектКомпетентность родителей как условие содействия нравственному и эмоциональному благополучию ребенка презентация добро и зло
презентация добро и зло Транспорт и мировое хозяйство. 10 класс
Транспорт и мировое хозяйство. 10 класс Покорители космоса. 4 класс
Покорители космоса. 4 класс Мерез
Мерез Презентация проф 2024
Презентация проф 2024 Проектная деятельность учащихся
Проектная деятельность учащихся Игра Тропинки здоровья
Игра Тропинки здоровья Аймақтандыру және компартиментализация
Аймақтандыру және компартиментализация Свойства функции (9 класс)
Свойства функции (9 класс) The political system in the kingdom of Far Far Away
The political system in the kingdom of Far Far Away Судебная медицина. Введение в специальность
Судебная медицина. Введение в специальность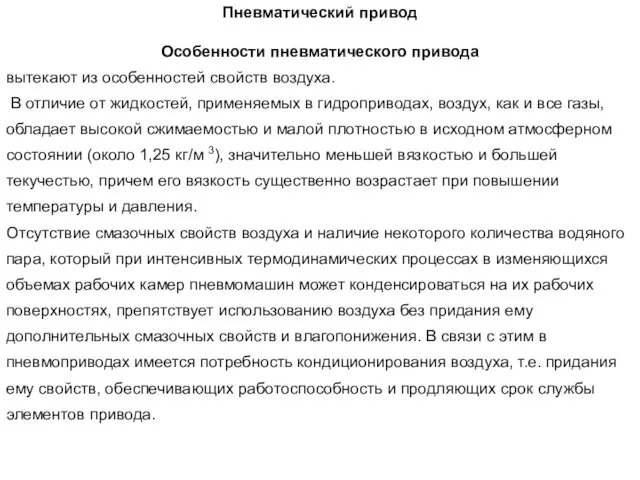 Пневматический привод. Особенности пневматического привода
Пневматический привод. Особенности пневматического привода Перспектива модернизации самолета Ту-154
Перспектива модернизации самолета Ту-154 Виды и типы культурно-досуговой деятельности
Виды и типы культурно-досуговой деятельности З 8 березням!
З 8 березням! Отделка шерстяных тканей
Отделка шерстяных тканей Знакомство с Arduino. Lesson 1
Знакомство с Arduino. Lesson 1 С новым годом
С новым годом Презентация Стихи Агнии Барто
Презентация Стихи Агнии Барто Игры с использованием нестандартного самодельного оборудования для детей
Игры с использованием нестандартного самодельного оборудования для детей Опасность сигарет
Опасность сигарет Презентация по теме Азбука профессий
Презентация по теме Азбука профессий Праздник Казанской иконы Божией Матери
Праздник Казанской иконы Божией Матери Назови одним словом
Назови одним словом Прогрессивные и офисные очковые линзы
Прогрессивные и офисные очковые линзы