- Системы динамического позиционирования и навигации судов

Содержание
- 2. Что такое система динамического позиционирования (DP) Система динамического позиционирования — (англ. dynamic positioning system) — система
- 3. Применение DP систем Широкое распространение системы динамического позиционирования нашли на вспомогательных судах нефтегазовой отрасли, а именно:
- 4. Классификация систем DP Системы DP подразделяются на три класса (по степени устойчивости к единичным отказам): Класс
- 5. Элементы системы система энергоснабжения; пропульсивная установка; интегрированная система управления пропульсивной установкой датчики определения положения судна и
- 6. Как система определяет местоположение судна и его отклонение от заданного курса Существуют абсолютные датчики(GPS и DGPS),
- 7. Абсолютный датчик - DGPS Дифференциальный GPS (DGPS) работает путем размещения приемника GPS, который является базовой станцией
- 8. Относительные датчики К относительным датчикам относятся: лазерно-оптические (CyScan) радиоволновые (Artemis, Radascan) электромеханические (Taut Wire) гидроакуститческие (Hydroacoustic
- 9. Лазерно-оптический датчик CyScan Лазерная система позиционирования CyScan состоит из вращающегося на стабилизирующей платформе ротора и отражателя,
- 10. Радиоволновые датчики ARTEMIS – для определения позиции по расстоянию и угла поворота антенн береговой и находящейся
- 11. Электромеханические датчики Одним из древнейших таких датчиков является Taut Wire. На дно опускается тяжелый груз, подвешенный
- 12. Гидроакустические датчики Система для определения относительного местоположения между передатчиком и приемником под водой. Зная скорость звука
- 13. Пропульсивная установка Система всех судовых двигателей носит название пропульсивной установки
- 14. Органы управления судном Подруливающее устройство( Tunnel Thruster) — судовое устройство, предназначенное для активного управления судном; рабочий
- 16. Скачать презентацию
Что такое система динамического позиционирования (DP)
Система динамического позиционирования — (англ. dynamic positioning
Что такое система динамического позиционирования (DP)
Система динамического позиционирования — (англ. dynamic positioning
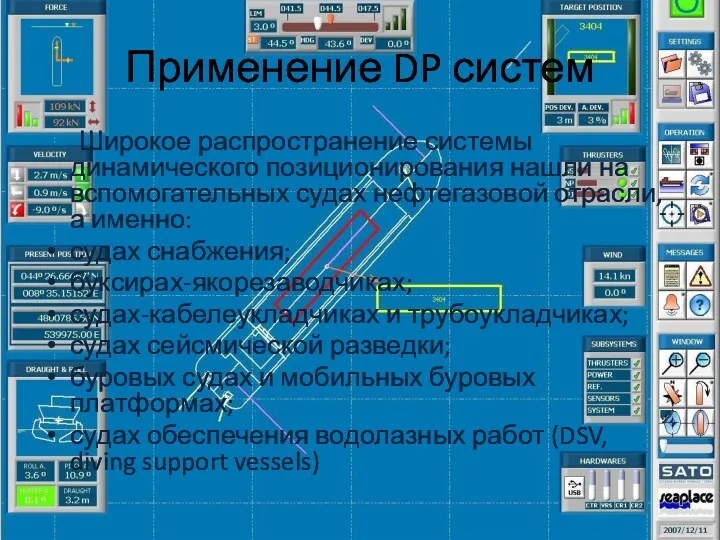
Применение DP систем
Широкое распространение системы динамического позиционирования нашли на вспомогательных судах
Применение DP систем
Широкое распространение системы динамического позиционирования нашли на вспомогательных судах
Классификация систем DP
Системы DP подразделяются на три класса (по степени устойчивости
Классификация систем DP
Системы DP подразделяются на три класса (по степени устойчивости
Элементы системы
система энергоснабжения;
пропульсивная установка;
интегрированная система управления пропульсивной установкой
датчики определения положения судна
Элементы системы
система энергоснабжения;
пропульсивная установка;
интегрированная система управления пропульсивной установкой
датчики определения положения судна
Как система определяет местоположение судна и его отклонение от заданного курса
Существуют
Как система определяет местоположение судна и его отклонение от заданного курса
Существуют
Абсолютный датчик - DGPS
Дифференциальный GPS (DGPS) работает путем размещения приемника GPS,
Абсолютный датчик - DGPS
Дифференциальный GPS (DGPS) работает путем размещения приемника GPS,
Относительные датчики
К относительным датчикам относятся:
лазерно-оптические (CyScan)
радиоволновые (Artemis, Radascan)
электромеханические (Taut Wire)
гидроакуститческие (Hydroacoustic
Относительные датчики
К относительным датчикам относятся:
лазерно-оптические (CyScan)
радиоволновые (Artemis, Radascan)
электромеханические (Taut Wire)
гидроакуститческие (Hydroacoustic
Лазерно-оптический датчик CyScan
Лазерная система позиционирования CyScan состоит из вращающегося на стабилизирующей
Лазерно-оптический датчик CyScan
Лазерная система позиционирования CyScan состоит из вращающегося на стабилизирующей
Радиоволновые датчики
ARTEMIS – для определения позиции по расстоянию и угла поворота
Радиоволновые датчики
ARTEMIS – для определения позиции по расстоянию и угла поворота
Электромеханические датчики
Одним из древнейших таких датчиков является Taut Wire. На дно
Электромеханические датчики
Одним из древнейших таких датчиков является Taut Wire. На дно
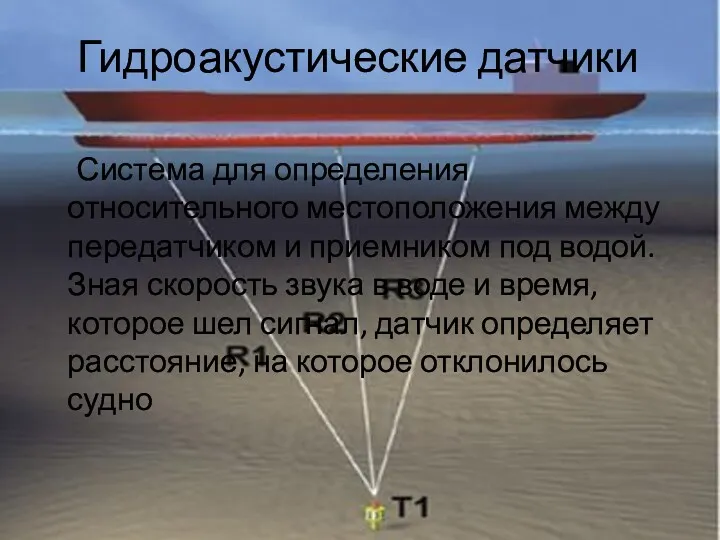
Гидроакустические датчики
Система для определения относительного местоположения между передатчиком и приемником под
Гидроакустические датчики
Система для определения относительного местоположения между передатчиком и приемником под

Пропульсивная установка
Система всех судовых двигателей носит название пропульсивной установки
Пропульсивная установка
Система всех судовых двигателей носит название пропульсивной установки

Органы управления судном
Подруливающее устройство( Tunnel Thruster) — судовое устройство, предназначенное для активного
Органы управления судном
Подруливающее устройство( Tunnel Thruster) — судовое устройство, предназначенное для активного
 Градусная сетка. Географические координаты
Градусная сетка. Географические координаты Галогены
Галогены Мастер-классс родителями Снежки или Елочные игрушки своими руками
Мастер-классс родителями Снежки или Елочные игрушки своими руками Программный продукт
Программный продукт Парк-музей имени А. К. Толстого.
Парк-музей имени А. К. Толстого. Видимое движение планет
Видимое движение планет Логопедического проект Использование логопедического массажа и ДЕНС-терапии в коррекциии дизартрических проявлений нарушений речи дошкольников в условиях ДОУ
Логопедического проект Использование логопедического массажа и ДЕНС-терапии в коррекциии дизартрических проявлений нарушений речи дошкольников в условиях ДОУ Национальная система квалификаций России: основные понятия
Национальная система квалификаций России: основные понятия Презентация к викторине Что за прелесть эти сказки
Презентация к викторине Что за прелесть эти сказки Психология
Психология Линейная функция
Линейная функция Виды параллелограммов
Виды параллелограммов Аппараты воздушного охлаждения
Аппараты воздушного охлаждения Возрождение культурных традиций, связанных с театральной, хореографической, вокальной и концертной деятельностью, социальный проект+презентация
Возрождение культурных традиций, связанных с театральной, хореографической, вокальной и концертной деятельностью, социальный проект+презентация Земля – уникальная планета (Урок-презентация).
Земля – уникальная планета (Урок-презентация). Обобщение опыта работы по теме Использование ИКТ в начальной школе.
Обобщение опыта работы по теме Использование ИКТ в начальной школе. 09Г2С болатының механикалық қасиеттеріне термиялық өңдеу температурасының әсері
09Г2С болатының механикалық қасиеттеріне термиялық өңдеу температурасының әсері Основы математического моделирования
Основы математического моделирования Торжественная линенйка, посвященная инаугурации президента школы
Торжественная линенйка, посвященная инаугурации президента школы Разнообразие растений
Разнообразие растений Информационная и художественная природа телевизионного изображения
Информационная и художественная природа телевизионного изображения Бластоцистоз домашних плотоядных
Бластоцистоз домашних плотоядных Государственная программа развития здравоохранения РК ДЕНСАУЛЫК и ОСМС
Государственная программа развития здравоохранения РК ДЕНСАУЛЫК и ОСМС Определение угла. Развёрнутый угол
Определение угла. Развёрнутый угол Барометрические высотомеры: механические (ВД, ВМ, ВБМ), электромеханические (УВИД, ВЭМ-72), электронные (ВБЭ)
Барометрические высотомеры: механические (ВД, ВМ, ВБМ), электромеханические (УВИД, ВЭМ-72), электронные (ВБЭ) Система работы педагога дополнительного образования по развитию творческой одаренности детей в коллективе художественно – эстетической направленности
Система работы педагога дополнительного образования по развитию творческой одаренности детей в коллективе художественно – эстетической направленности Схема станции М
Схема станции М Знаки и история возникновения дорожных знаков
Знаки и история возникновения дорожных знаков