- Системы спутниковой навигации. Лекция 4

Содержание
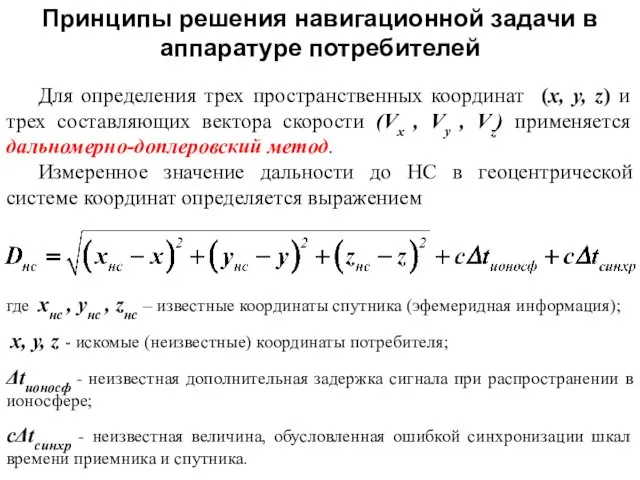
- 7. Принципы решения навигационной задачи в аппаратуре потребителей Для определения трех пространственных координат (x, y, z) и
- 8. В уравнение для дальности входят 5 неизвестных: координаты потребителя x, y, z; дополнительная задержка сигнала Δtионосф
- 9. Для нахождения этих неизвестных нужно получить четыре линейно независимых уравнения (систему уравнений) и найти из них
- 10. Vr нс = λ ΔFд нс /2 Уравнение для радиальной скорости (скорости изменения дальности) между НС
- 13. 1. Общие принципы построения приемников СРНС Степень технической сложности приемников и требования к их характеристикам зависят
- 14. Авиационные приемники делятся на 3 класса ( стандарт TSO-C129A). Класс А (А1, А2) – приемник, позволяющий
- 15. В авиационных приемниках могут быть реализованы функция контроля целостности (т.е. правильной работы и достоверности выходной информации)
- 16. В целях RAIM производятся несколько независимых определений, результаты которых сравниваются между собой. По результатам этих расчетов
- 17. AAIM (Airraft Autonomous Integrity Monitoring) обеспечивает контроль целостности (достоверности информации) путем ее сравнения с навигационной информацией,
- 19. Обобщенная структурная схема приемника спутниковой РНС
- 20. Основные режимы работы АП: поиск сигналов; слежение за задержкой кода, частотой и фазой сигнала; решение навигационной
- 21. Δt – неизвестная задержка сигнала, принимаемого от спутника Δt1, Δt2 – задержки копии принимаемого сигнала в
- 22. Функция корреляции
- 23. Авиационный приемник А-737
- 24. СН-4312
- 31. Инерциально-спутниковая система навигации
- 33. Скачать презентацию

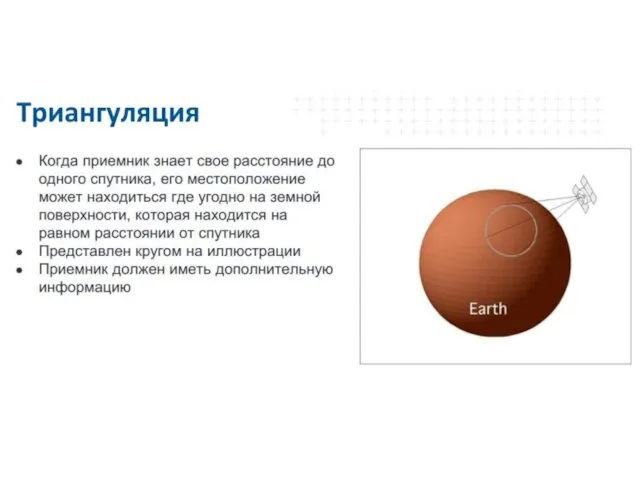



Принципы решения навигационной задачи в аппаратуре потребителей
Для определения трех пространственных координат
Принципы решения навигационной задачи в аппаратуре потребителей
Для определения трех пространственных координат
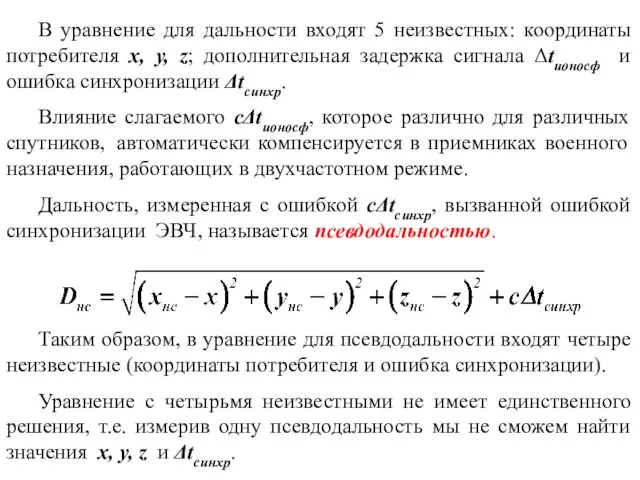
В уравнение для дальности входят 5 неизвестных: координаты потребителя x, y,
В уравнение для дальности входят 5 неизвестных: координаты потребителя x, y,
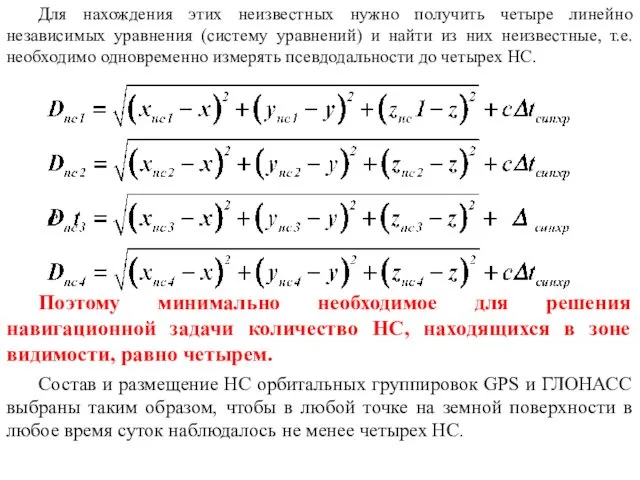
Для нахождения этих неизвестных нужно получить четыре линейно независимых уравнения (систему
Для нахождения этих неизвестных нужно получить четыре линейно независимых уравнения (систему
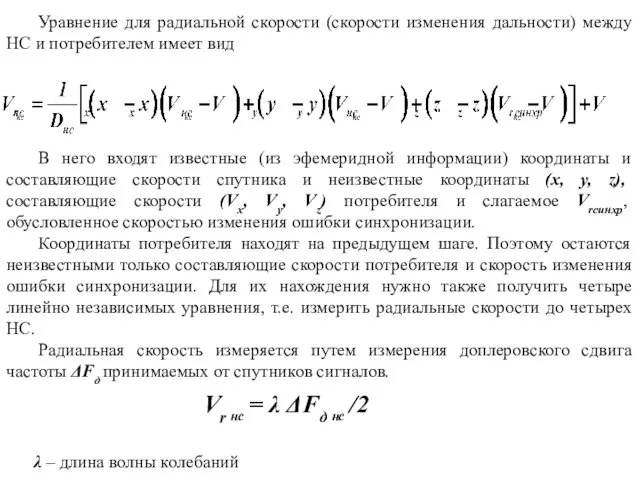
Vr нс = λ ΔFд нс /2
Уравнение для радиальной скорости
Vr нс = λ ΔFд нс /2
Уравнение для радиальной скорости

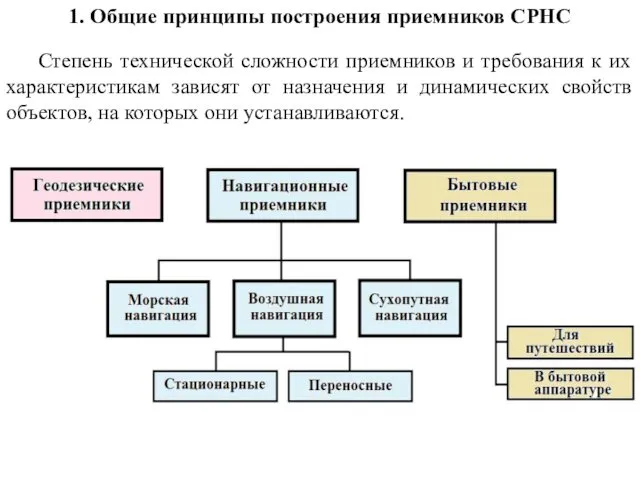
1. Общие принципы построения приемников СРНС
Степень технической сложности приемников и требования
1. Общие принципы построения приемников СРНС
Степень технической сложности приемников и требования
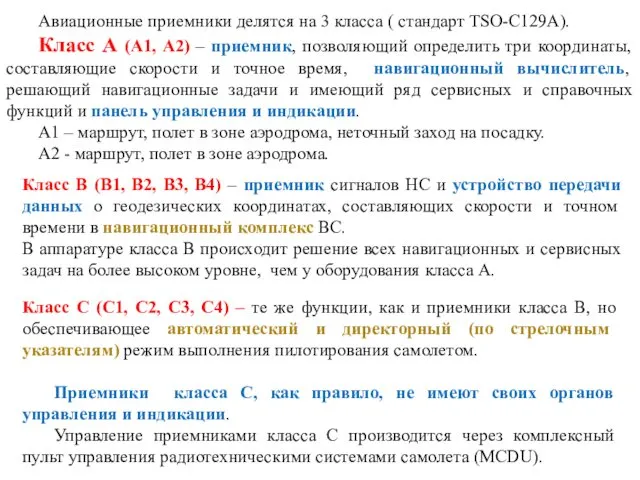
Авиационные приемники делятся на 3 класса ( стандарт TSO-C129A).
Класс А (А1,
Авиационные приемники делятся на 3 класса ( стандарт TSO-C129A).
Класс А (А1,
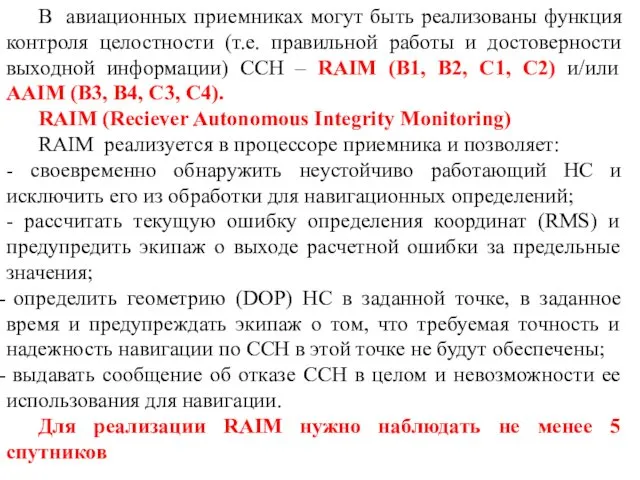
В авиационных приемниках могут быть реализованы функция контроля целостности (т.е. правильной
В авиационных приемниках могут быть реализованы функция контроля целостности (т.е. правильной
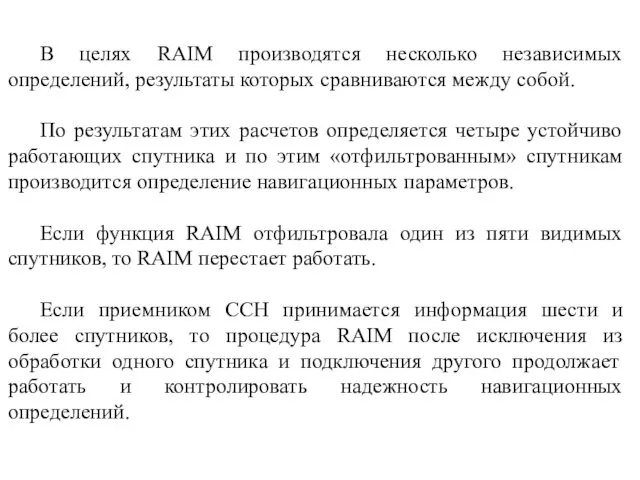
В целях RAIM производятся несколько независимых определений, результаты которых сравниваются между
В целях RAIM производятся несколько независимых определений, результаты которых сравниваются между
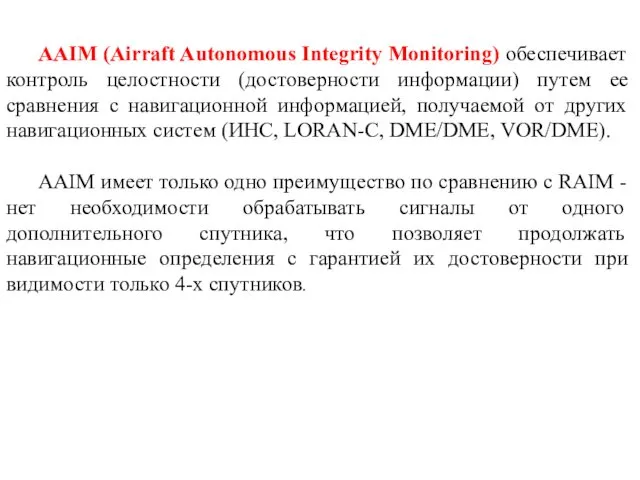
AAIM (Airraft Autonomous Integrity Monitoring) обеспечивает контроль целостности (достоверности информации) путем
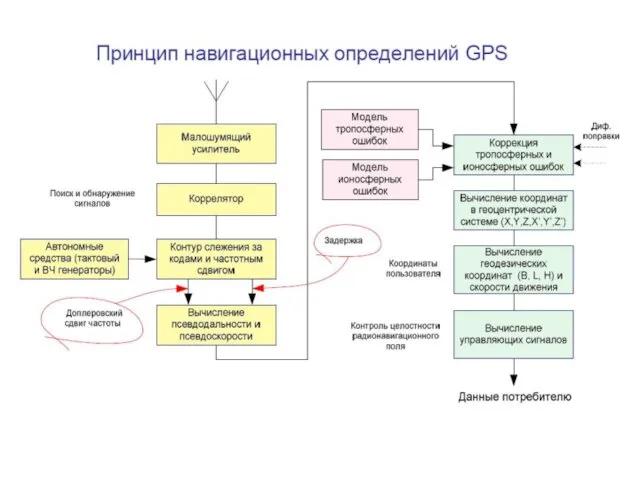
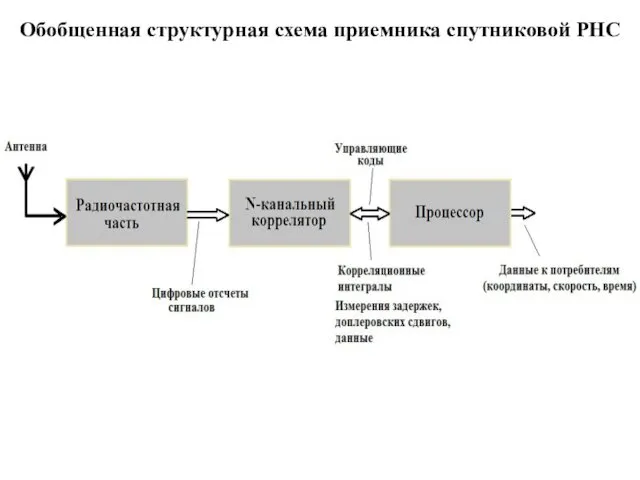
Обобщенная структурная схема приемника спутниковой РНС
Обобщенная структурная схема приемника спутниковой РНС
Основные режимы работы АП:
поиск сигналов;
слежение за задержкой кода, частотой и фазой
Основные режимы работы АП:
поиск сигналов;
слежение за задержкой кода, частотой и фазой
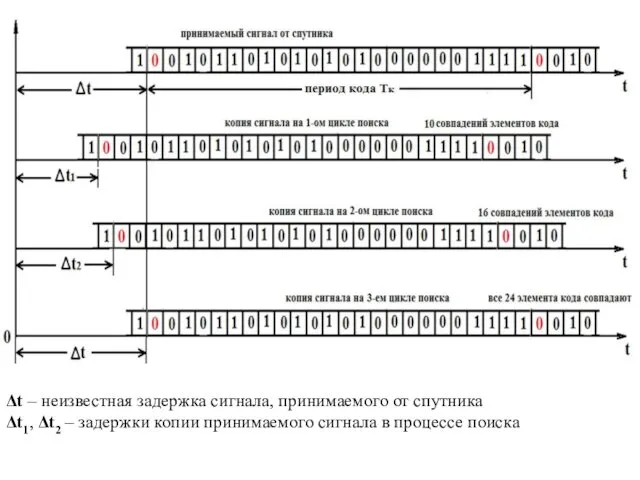
Δt – неизвестная задержка сигнала, принимаемого от спутника
Δt1, Δt2 – задержки
Δt – неизвестная задержка сигнала, принимаемого от спутника
Δt1, Δt2 – задержки
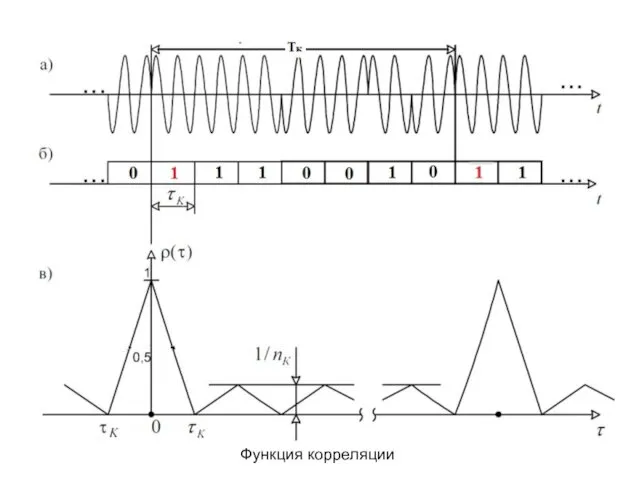
Функция корреляции
Функция корреляции

Авиационный приемник А-737
Авиационный приемник А-737

СН-4312
СН-4312






Инерциально-спутниковая система навигации
Инерциально-спутниковая система навигации
 День Знаний во 2 классе
День Знаний во 2 классе World Animal Day
World Animal Day Железы внутренней секреции
Железы внутренней секреции 11кл. Презент. Алгебр. уравнения
11кл. Презент. Алгебр. уравнения Личный финансовый план
Личный финансовый план Физическая подготовка обучающихся.
Физическая подготовка обучающихся. Дыхательная система
Дыхательная система Начало ВОВ
Начало ВОВ Проектный подход при разработке и внедрении СМК
Проектный подход при разработке и внедрении СМК Базовые институты российского общества
Базовые институты российского общества Рейтинг класса
Рейтинг класса Прогулки по Третьяковской галерее
Прогулки по Третьяковской галерее Разработка и изготовление модели молодежного комплекта для отдыха
Разработка и изготовление модели молодежного комплекта для отдыха Острое токсико-инфекционное заболевание - ботулизм
Острое токсико-инфекционное заболевание - ботулизм Душепопечение
Душепопечение Условия труда работников
Условия труда работников Роль классного руководителя во внеурочной деятельности в условиях ФГОС
Роль классного руководителя во внеурочной деятельности в условиях ФГОС Leak and pressure tests in magnets production chain
Leak and pressure tests in magnets production chain Догмат о искуплении
Догмат о искуплении Особенности конструктивного мышления, как условие развития математических способностей детей старшего дошкольного возраста
Особенности конструктивного мышления, как условие развития математических способностей детей старшего дошкольного возраста Повышение эффективности деятельности организации на примере МБУК Няндомская центральная библиотека
Повышение эффективности деятельности организации на примере МБУК Няндомская центральная библиотека Coffee Zavod. Доходная кофейня самообслуживания
Coffee Zavod. Доходная кофейня самообслуживания История Балашихи. Фото. Диск
История Балашихи. Фото. Диск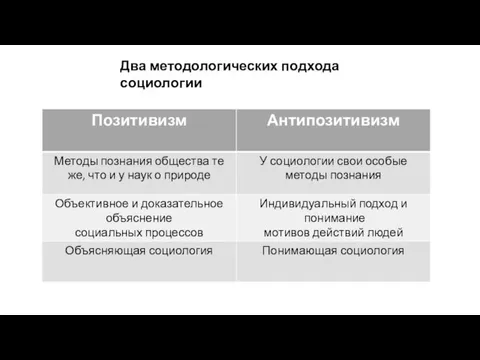 Два методологических подхода социологии
Два методологических подхода социологии Географическая мозаика
Географическая мозаика Управление человеческими ресурсами
Управление человеческими ресурсами Резьба: понятие, классификация, нарезание резьбы
Резьба: понятие, классификация, нарезание резьбы Малые тела Солнечной системы
Малые тела Солнечной системы