- Введение в робототехнику

Содержание
- 2. Немного из истории В основу слова «робототехника» легло слово «робот», придуманное в 1920 г. чешским писателем
- 3. Виды робототехники Строительная Промышленная Бытовая Авиационная Экстремальная Военная Космическая Подводная
- 4. Законы робототехники Робот не может причинить вред человеку или своим бездействием допустить, чтобы человеку был причинён
- 5. В 1986 году в романе Роботы и Империя (англ. Robots and Empire) Азимов предложил Нулевой Закон:
- 6. Законы объединения
- 7. В грязной обуви, друзья, В кабинет входить нельзя.
- 8. В одежде мокрой не входить, Руки тоже не мочить.
- 9. Начинать работу строго, С разрешения педагога, И учтите: Вы в ответе, За порядок в кабинете.
- 10. Шнуры, розетки, провода Не надо трогать никогда.
- 11. Бережливым быть умей, И по клавишам не бей, Там учтите этот факт, Электрический контакт.
- 12. Любит мышка, чтобы были Руки чистыми, сухими. Лучше здесь не пить, не кушать, Чтоб порядок не
- 13. Если вводишь ты ответ, А компьютер скажет нет, По дисплею не стучи, Лучше правила учи!
- 14. Если сбой дает машина, Терпение вам необходимо, Не бывает без проблем Даже с умной ЭВМ.
- 15. Остальное всем известно: Чтоб не вскакивали с места, Не кричали, не толкались, За компьютеры не дрались.
- 16. Если где-то заискрит, Или что-нибудь дымит. Время попусту не трать – Нужно учителя позвать.
- 17. По экрану не стучи, Мышку в руку ты возьми И что надо покажи.
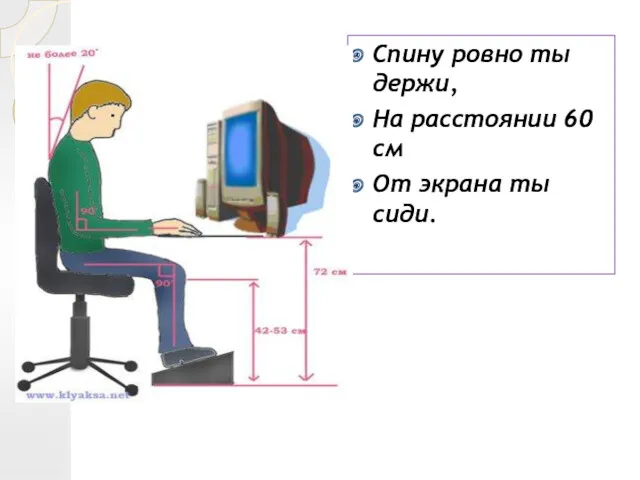
- 18. Спину ровно ты держи, На расстоянии 60 см От экрана ты сиди.
- 19. За компьютером сидишь, За дисплеем ты следишь. Никаких предметов лишних На столе не может быть.
- 20. При работе с ЭВМ Нельзя ходить по классу всем.
- 21. Как здорово! Как классно! Работать на компьютере. Чтоб не было опасно, Не лезь к нему вовнутрь.
- 23. Знакомство Что вы ждете от занятий?
- 24. Введение в Lego Mindstorms ev3
- 25. Блок Lego Mindstorms EV3 К нему подключаются двигатели (порты A, B, C, D) и датчики (1,
- 26. Большой сервомотор Соединяется с блоком NXT в порты A, B, C, D Можно регулировать: мощность вращения
- 27. Средний мотор
- 28. Датчик нажатия (Touch sensor) Осязание робота Позволяет “нащупывать” путь (определять, есть ли перед ним препятствие) Может
- 29. Ультразвуковой датчик (Ultrasonic sensor) Работает по принципу локатора летучей мыши. Определяет расстояние до препятствия (от 0
- 30. Датчик света (Color Sensor) Позволяет роботу различать цвета и отличать свет от темноты Определяет уровень освещенности
- 31. Гироскоп Гироскоп— это цифровой датчик, который обнаруживает вращательное движение по одной оси, может определить скорость вращения
- 32. Кабели Используются для соединения двигателей и датчиков с блоком EV3 20 см, 35 см и 50
- 33. Детали робота Балки Штифты Оси Шестеренки Колеса Прочие
- 34. Балки Основные компоненты корпуса робота Делятся на прямые и изогнутые (1 или 2 раза) Меряются по
- 35. Штифты Используются для соединения балок между собой и с другими деталями Бывают: двухмодульные трехмодульные крестообразные
- 36. Оси Используются в основном для соединения вращающихся деталей: двигателей, шестеренок, колес Длина оси меряется в модулях:
- 37. Шестеренки Используются для передачи вращения с двигателя на колеса робота, а также для изменения мощности и
- 38. Колеса Позволяют роботу ехать по сравнительно плоской поверхности Для лучшего сцепления с поверхностью на колеса можно
- 39. Расскажите об интересном роботе!
- 41. Скачать презентацию
Немного из истории
В основу слова «робототехника» легло слово «робот», придуманное в
Немного из истории
В основу слова «робототехника» легло слово «робот», придуманное в

Виды робототехники
Строительная
Промышленная
Бытовая
Авиационная
Экстремальная
Военная
Космическая
Подводная
Виды робототехники
Строительная
Промышленная
Бытовая
Авиационная
Экстремальная
Военная
Космическая
Подводная
Законы робототехники
Робот не может причинить вред человеку или своим бездействием допустить,
Законы робототехники
Робот не может причинить вред человеку или своим бездействием допустить,
В 1986 году в романе Роботы и Империя (англ. Robots and
В 1986 году в романе Роботы и Империя (англ. Robots and
Законы объединения
Законы объединения
В грязной обуви, друзья,
В кабинет входить нельзя.
В грязной обуви, друзья,
В кабинет входить нельзя.
В одежде мокрой не входить,
Руки тоже не мочить.
В одежде мокрой не входить,
Руки тоже не мочить.
Начинать работу строго,
С разрешения педагога,
И учтите: Вы в ответе,
За порядок в
Начинать работу строго,
С разрешения педагога,
И учтите: Вы в ответе,
За порядок в
Шнуры, розетки, провода
Не надо трогать никогда.
Шнуры, розетки, провода
Не надо трогать никогда.
Бережливым быть умей,
И по клавишам не бей,
Там учтите этот факт,
Электрический контакт.
Бережливым быть умей,
И по клавишам не бей,
Там учтите этот факт,
Электрический контакт.
Любит мышка, чтобы были
Руки чистыми, сухими.
Лучше здесь не пить, не кушать,
Чтоб
Любит мышка, чтобы были
Руки чистыми, сухими.
Лучше здесь не пить, не кушать,
Чтоб
Если вводишь ты ответ,
А компьютер скажет нет,
По дисплею не стучи,
Лучше правила
Если вводишь ты ответ,
А компьютер скажет нет,
По дисплею не стучи,
Лучше правила
Если сбой дает машина,
Терпение вам необходимо,
Не бывает без проблем
Даже с умной
Если сбой дает машина,
Терпение вам необходимо,
Не бывает без проблем
Даже с умной
Остальное всем известно:
Чтоб не вскакивали с места,
Не кричали, не толкались,
За компьютеры
Остальное всем известно:
Чтоб не вскакивали с места,
Не кричали, не толкались,
За компьютеры

Если где-то заискрит,
Или что-нибудь дымит.
Время попусту не трать –
Нужно учителя позвать.
Если где-то заискрит,
Или что-нибудь дымит.
Время попусту не трать –
Нужно учителя позвать.
По экрану не стучи,
Мышку в руку ты возьми
И что надо покажи.
По экрану не стучи,
Мышку в руку ты возьми
И что надо покажи.
Спину ровно ты держи,
На расстоянии 60 см
От экрана ты сиди.
Спину ровно ты держи,
На расстоянии 60 см
От экрана ты сиди.
За компьютером сидишь,
За дисплеем ты следишь.
Никаких предметов лишних
На столе
За компьютером сидишь,
За дисплеем ты следишь.
Никаких предметов лишних
На столе
При работе с ЭВМ
Нельзя ходить по классу всем.
При работе с ЭВМ
Нельзя ходить по классу всем.
Как здорово! Как классно!
Работать на компьютере.
Чтоб не было опасно,
Не лезь к
Как здорово! Как классно!
Работать на компьютере.
Чтоб не было опасно,
Не лезь к

Знакомство
Что вы ждете от занятий?
Знакомство
Что вы ждете от занятий?

Введение в Lego Mindstorms ev3
Введение в Lego Mindstorms ev3

Блок Lego Mindstorms EV3
К нему подключаются двигатели (порты A, B, C,
Блок Lego Mindstorms EV3
К нему подключаются двигатели (порты A, B, C,
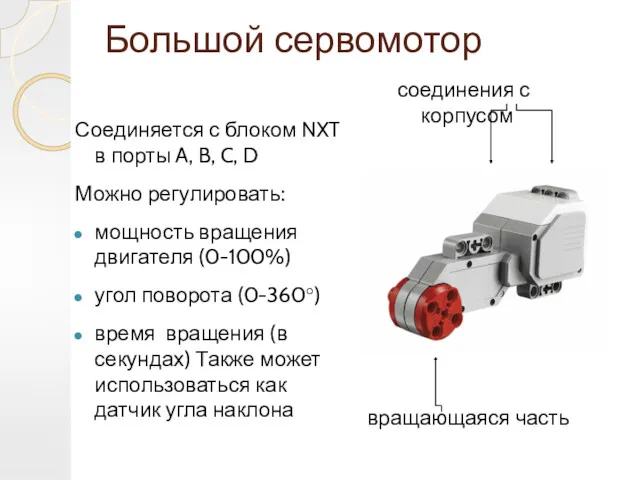
Большой сервомотор
Соединяется с блоком NXT в порты A, B, C, D
Можно
Большой сервомотор
Соединяется с блоком NXT в порты A, B, C, D
Можно

Средний мотор
Средний мотор

Датчик нажатия (Touch sensor)
Осязание робота
Позволяет “нащупывать” путь (определять, есть ли перед
Датчик нажатия (Touch sensor)
Осязание робота
Позволяет “нащупывать” путь (определять, есть ли перед

Ультразвуковой датчик
(Ultrasonic sensor)
Работает по принципу локатора летучей мыши. Определяет расстояние
Ультразвуковой датчик
(Ultrasonic sensor)
Работает по принципу локатора летучей мыши. Определяет расстояние

Датчик света (Color Sensor)
Позволяет роботу различать цвета и отличать свет от
Датчик света (Color Sensor)
Позволяет роботу различать цвета и отличать свет от
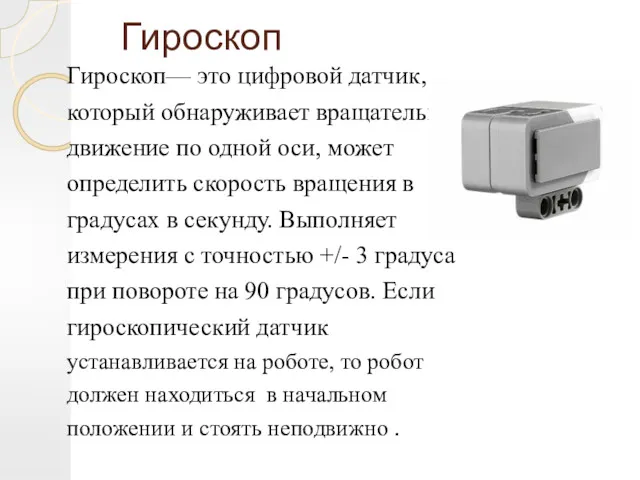
Гироскоп
Гироскоп— это цифровой датчик, который обнаруживает вращательное движение по одной оси,
Гироскоп
Гироскоп— это цифровой датчик, который обнаруживает вращательное движение по одной оси,

Кабели
Используются для соединения двигателей и датчиков с блоком EV3
20 см,
Кабели
Используются для соединения двигателей и датчиков с блоком EV3
20 см,

Детали робота
Балки
Штифты
Оси
Шестеренки
Колеса
Прочие
Детали робота
Балки
Штифты
Оси
Шестеренки
Колеса
Прочие
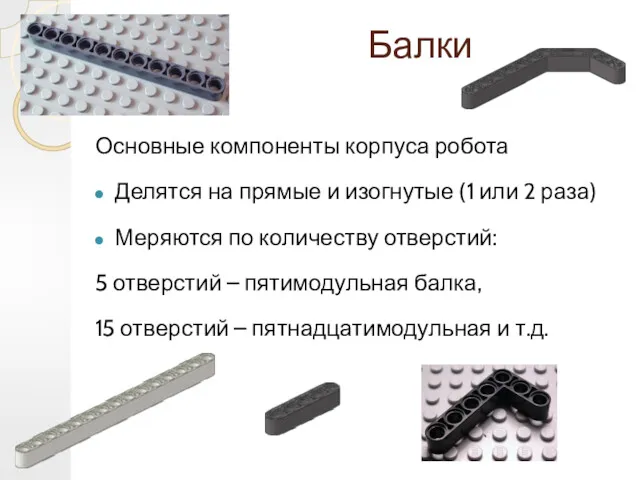
Балки
Основные компоненты корпуса робота
Делятся на прямые и изогнутые (1 или 2
Балки
Основные компоненты корпуса робота
Делятся на прямые и изогнутые (1 или 2
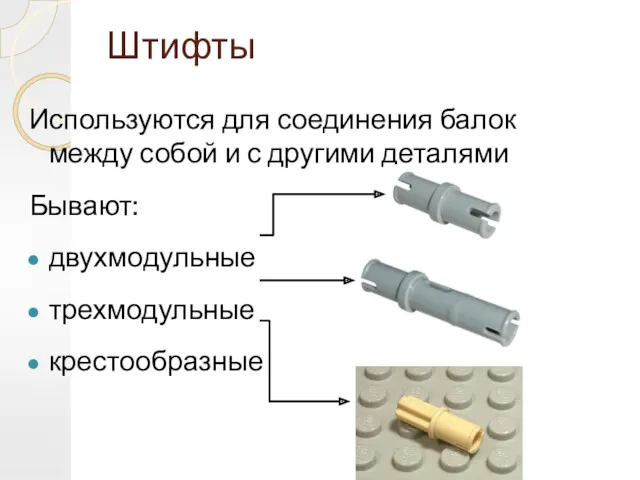
Штифты
Используются для соединения балок между собой и с другими деталями
Бывают:
двухмодульные
трехмодульные
крестообразные
Штифты
Используются для соединения балок между собой и с другими деталями
Бывают:
двухмодульные
трехмодульные
крестообразные

Оси
Используются в основном для соединения вращающихся деталей: двигателей, шестеренок, колес
Длина оси
Оси
Используются в основном для соединения вращающихся деталей: двигателей, шестеренок, колес
Длина оси

Шестеренки
Используются для передачи вращения с двигателя на колеса робота, а также
Шестеренки
Используются для передачи вращения с двигателя на колеса робота, а также

Колеса
Позволяют роботу ехать по сравнительно плоской поверхности
Для лучшего сцепления с поверхностью
Колеса
Позволяют роботу ехать по сравнительно плоской поверхности
Для лучшего сцепления с поверхностью

Расскажите об интересном роботе!
Расскажите об интересном роботе!
 Культура арабо-мусульманского мира
Культура арабо-мусульманского мира Животные мира
Животные мира 7 чудес Амурской области
7 чудес Амурской области VLAN. Технологии защиты сетей. Иерархическая сегментация трафика для изоляции портов
VLAN. Технологии защиты сетей. Иерархическая сегментация трафика для изоляции портов Физика - наука о природе
Физика - наука о природе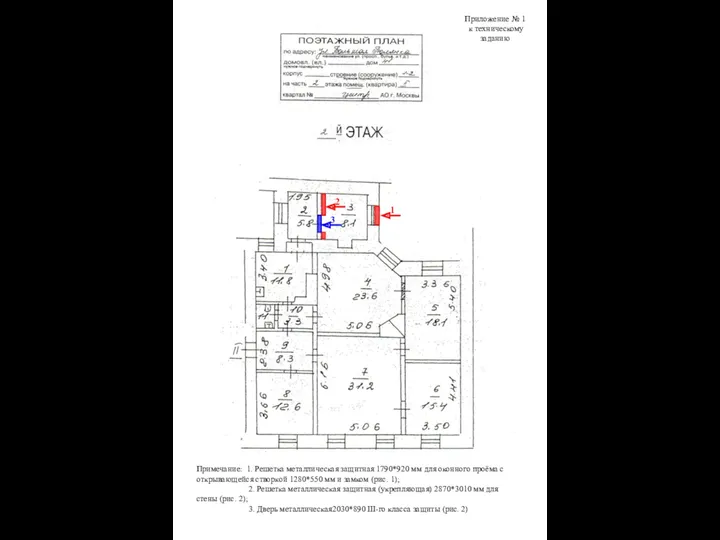 Решетка металлическая для оконного проёма. Приложение к техническому заданию
Решетка металлическая для оконного проёма. Приложение к техническому заданию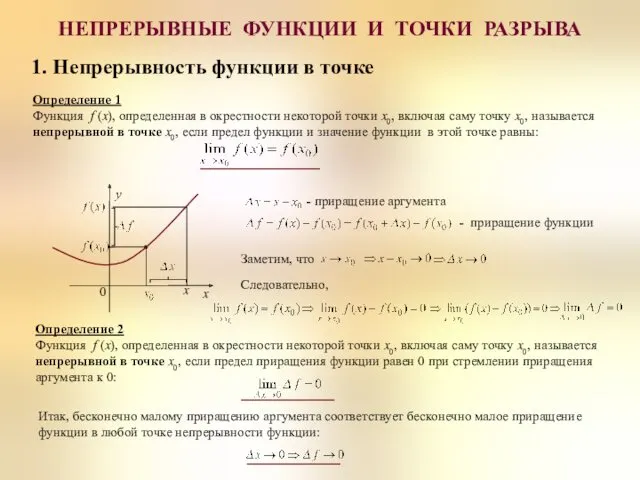 Непрерывные функции и точки разрыва
Непрерывные функции и точки разрыва Мастер-класс.Учимся писать синквейн. Мастер-класс на конкурсе Учитель года 2015
Мастер-класс.Учимся писать синквейн. Мастер-класс на конкурсе Учитель года 2015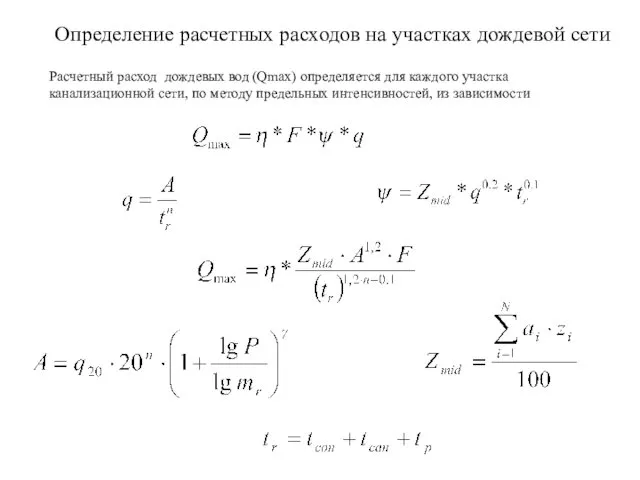 Определение расчетных расходов дождевого стока
Определение расчетных расходов дождевого стока DRAM Tutorial
DRAM Tutorial Альдегиды, их химические и физические свойства
Альдегиды, их химические и физические свойства Анализ актуальности
Анализ актуальности Wikipedia. How it works and why it works
Wikipedia. How it works and why it works Энергоэффективные и энергосберегающие технологии и оборудования в производственной сфере и быту
Энергоэффективные и энергосберегающие технологии и оборудования в производственной сфере и быту Деисус. Первая треть XIII в. Из Успенского собора Московского Кремля. Государственная Третьяковская галерея
Деисус. Первая треть XIII в. Из Успенского собора Московского Кремля. Государственная Третьяковская галерея Проект Легкий шаг. Номинация Семейно-патриотическое воспитание
Проект Легкий шаг. Номинация Семейно-патриотическое воспитание Институциональные основы функционирования рыночной экономики
Институциональные основы функционирования рыночной экономики Положительные качества человека. Знакомство с понятием толерантности.
Положительные качества человека. Знакомство с понятием толерантности. Праздник осени,3 класс
Праздник осени,3 класс Игра Крестики-нолики
Игра Крестики-нолики Пирамида. Усеченная и правильная пирамиды. Тетраэдр
Пирамида. Усеченная и правильная пирамиды. Тетраэдр Портфолио учащегося как один из этапов перехода на новые стандарты.
Портфолио учащегося как один из этапов перехода на новые стандарты. Просеиватели муки для предприятий хлебопекарного и кондитерского производства
Просеиватели муки для предприятий хлебопекарного и кондитерского производства Методические указания к выполнению выпускной квалификационной работы для студентов. Профиль Бурение нефтяных и газовых скважин
Методические указания к выполнению выпускной квалификационной работы для студентов. Профиль Бурение нефтяных и газовых скважин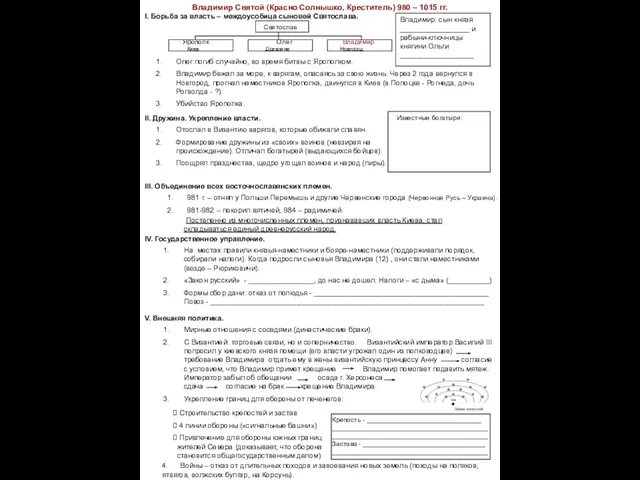 Владимир Святой (Красно Солнышко, Креститель) 980 – 1015 гг
Владимир Святой (Красно Солнышко, Креститель) 980 – 1015 гг Оборудование для транспортирования и хранения сырья
Оборудование для транспортирования и хранения сырья Презентация к уроку химии в 10 классе Строение и химические свойства глюкозы.
Презентация к уроку химии в 10 классе Строение и химические свойства глюкозы. Декартовы прямоугольные координаты на плоскости и в пространстве
Декартовы прямоугольные координаты на плоскости и в пространстве