- Ядерная архитектура ОС Windows

Содержание
- 2. Применение знаний ядра ОС Средства защиты информации – системы шифрования сетевого трафика, защита данных на диске
- 3. Применение знаний при разработке инфраструктуры анализа бинарного кода Драйвер получения информации: список процессов, модулей и копии
- 4. Структура курса Лекции + лабораторные задания: простейший драйвер ядра создание устройств и символических ссылок драйвером консольная
- 5. Программное обеспечение и литература Среда разработки для выполнения лабораторных работ развернута на виртуальной машине VirtualBox Там
- 6. VisualStudio 2008/2010 (WS 2010 не рекомендуется при отсутствии подключения к интернету) Пакет WDK 7.1.0, поддерживает все
- 7. Основные понятия Процессы, потоки и адресные пространства в ОС Windows: взаимосвязь с процессорной архитектурой Архитектура процессора
- 8. Защита памяти по привилегиям («кольца защиты») 0 1 2 3 User mode Kernelmode Передача управления Доступ
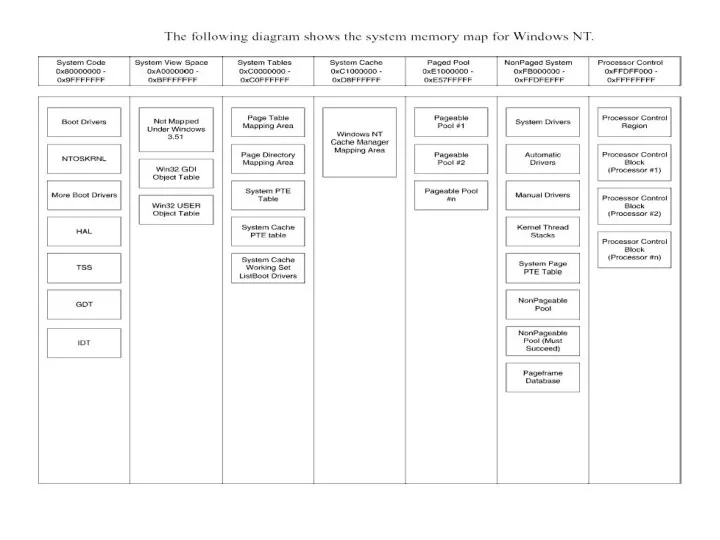
- 9. Особенности организации памяти в Windows на примере 32-разрядной адресации Вирт. адрес
- 10. VMCS Трансляция памяти при использовании гипервизора с включенным EPT Вирт. адрес селектор:смещение TLB (буфер ассоциативной трансляции)
- 11. ОС NT, хотя и использует селекторы, но использует их в минимальной степени. NT реализует плоскую 32-разрядную
- 12. Реальная защита памяти по привилегиям, как и реализация понятия адресное пространство, осуществляется посредством механизма страничной организации
- 13. Виртуальное адресное пространство процесса 0 2Гб 4Гб user kernel 0 3Гб 4Гб user kernel Код и
- 14. Каталоги страниц всех процессов организованы так, что преобразование линейного в физический адрес для системного диапазона любого
- 16. Каталоги страниц позволяют создавать «совместно используемые» как внутри одного, так и между несколькими адресными пространствами области
- 17. Разновидность такого механизма – copy-on-write – используется для реализации механизма отображения файлов в память, через который
- 18. Загрузка модулей в адресное пространство Исполняемые файлы в ОС Windows имеют формат PE (Portable Executable). При
- 19. При завершении загрузки модуля со всеми его зависимостями управление передается на функцию – точку входа в
- 21. Поддержка многозадачности Механизм аппаратной поддержки многозадачности, предоставляемый архитектурой x86 (task switching) – в Windows не используется
- 22. Основные понятия: подведение итогов Процесс – соответствует некоторому запущенному в ОС приложению. Процесс можно рассматривать как
- 23. Адресное пространство – диапазон виртуальных адресов, доступный процессу. Для некоторой части этих адресов средствами ОС при
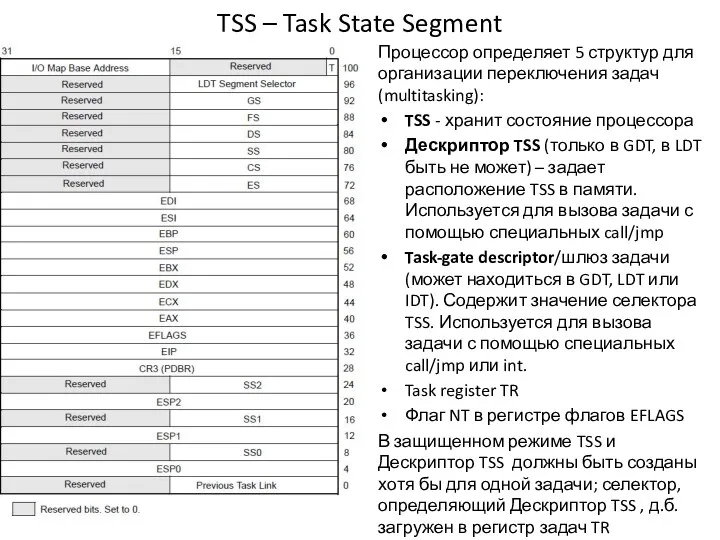
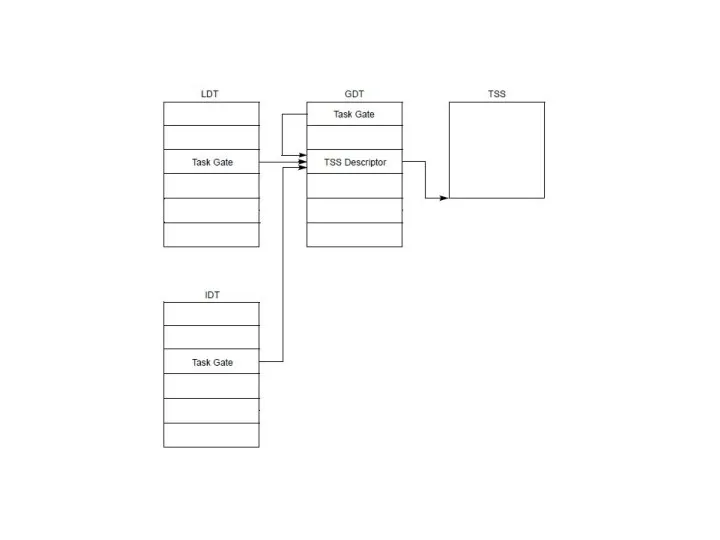
- 24. TSS – Task State Segment Процессор определяет 5 структур для организации переключения задач (multitasking): TSS -
- 26. Переключение на другую задачу осуществляется в одном из 4 случаев: выполняется инструкция JMP или CALL на
- 27. Обработка прерываний и исключений Два механизма прерывания работы программы interrupt – асинхронное событие, как правило генерируемое
- 28. DPL задает ограничение на уровень привилегий кода, который пытается вызвать прерывание (код 3-го кольца защиты не
- 29. EFLAGS EIP CS Error code Свободная часть стека Занятая часть стека ESP перед вызовом прерывания ESP
- 30. Поток – единица исполнения в ОС Windows. Механизм вытесняющей многозадачности, реализуемый ОС, применяется именно к потокам.
- 31. Система приоритетов Windows NT имеет двухуровневую модель приоритетов: Приоритеты высшего уровня (уровни запросов прерываний - Interrupt
- 32. Классы приоритетов в Win32 API 0 31 для 32-разрядных ОС 15 для 64-разрядных ОС Приоритет из
- 33. Приоритеты планирования Схема приоритетов, реализуемая ядром ОС: При запуске потоку назначается базовый приоритет (б.п.). В процессе
- 34. Планировщик Windows реализует «карусельную» (round-robbin) схему переключения потоков по правилу: Если есть потоки из диапазона realtime
- 35. Планировщик Windows реализует «карусельную» (round-robbin) схему переключения потоков по правилу: Если есть потоки из диапазона realtime
- 36. Если потоков с realtime-приоритетом нет – карусельная схема для всех потоков с динамическим диапазоном приоритетов. Для
- 37. Диаграмма состояния потоков
- 38. Готов (Ready). Поток готов к выполнению/рестарту после завершения ожидания. При поиске потока для выполнения диспетчер рассматривает
- 39. Уровни запросов прерываний (IRQL) IRQL – способ управления маскированием прерываний на конкретном процессоре. По сути –
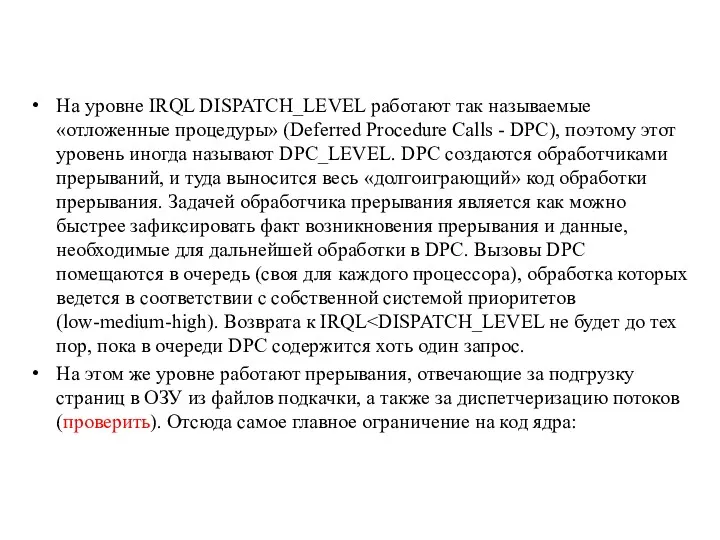
- 40. На уровне IRQL DISPATCH_LEVEL работают так называемые «отложенные процедуры» (Deferred Procedure Calls - DPC), поэтому этот
- 41. при работе процессора на уровне IRQL≥DISPATCH_LEVEL запрещено обращение к выгружаемой памяти – оно немедленно приведет к
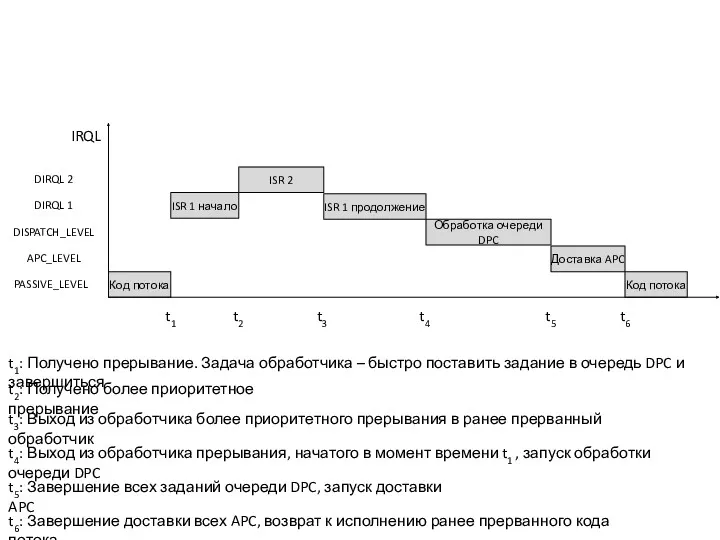
- 42. Код потока ISR 1 начало t1 PASSIVE_LEVEL Обработка очереди DPC ISR 2 ISR 1 продолжение Доставка
- 43. !!!В Win10 – появился Rank
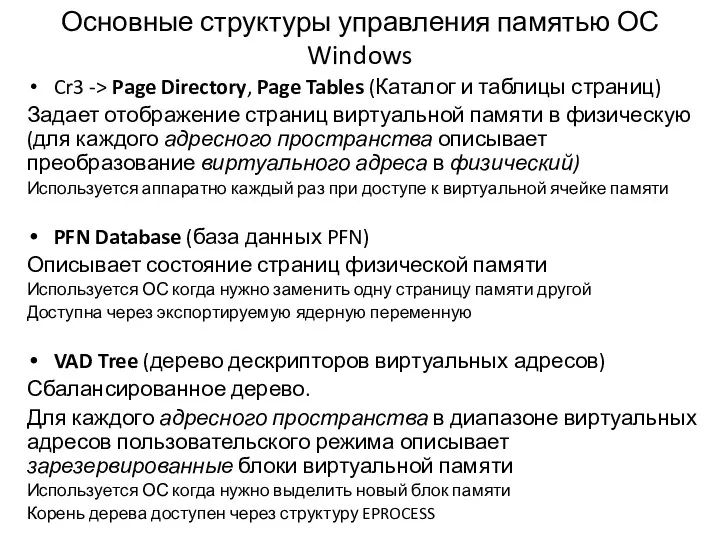
- 44. Основные структуры управления памятью ОС Windows Cr3 -> Page Directory, Page Tables (Каталог и таблицы страниц)
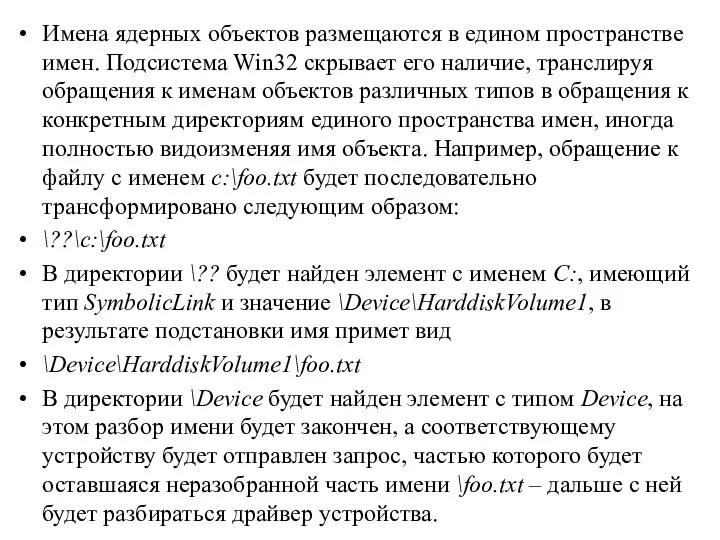
- 45. FS:[0] Основные структуры управления процессами и потоками PEB *Peb TEB (Thread Environment Block) TIB FS:[0] FS:[0]
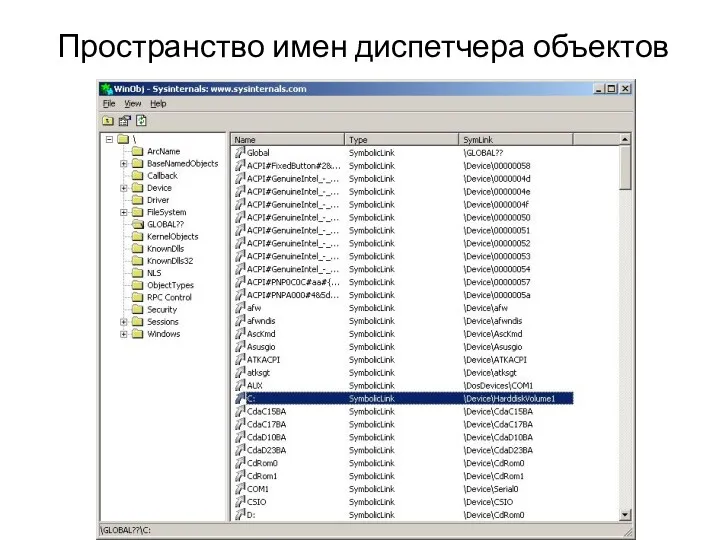
- 46. Пространство имен диспетчера объектов
- 47. Имена ядерных объектов размещаются в едином пространстве имен. Подсистема Win32 скрывает его наличие, транслируя обращения к
- 48. «Забегая вперед» Неразобранная часть имени, если она есть, хранится в стеке размещения в/в в поле FileName
- 49. Структура драйвера Работа драйвера начинается с вызова функции DriverEntry, соответствующей начальной точке входа в исполняемый модуль
- 50. ограничения Проблема при попытке написания кода драйвера на C++: функция main() – не первая функция с
- 51. Многоуровневая модель драйверов Legacy Drivers – WDM – KMDF – WDF Legacy Drivers – по сути
- 52. VisualStudio2019 + WDK for Windows 10 version 2004 (по состоянию на 01.09.2020) https://docs.microsoft.com/en-us/windows-hardware/drivers/download-the-wdk Выбрать Desktop development
- 55. Выбор целевой ОС (сборка для Win7 будет работать и на WinXP)
- 56. Изменить свойства проекта
- 57. Интеграции WDK с VisualStudio –VisualDDK
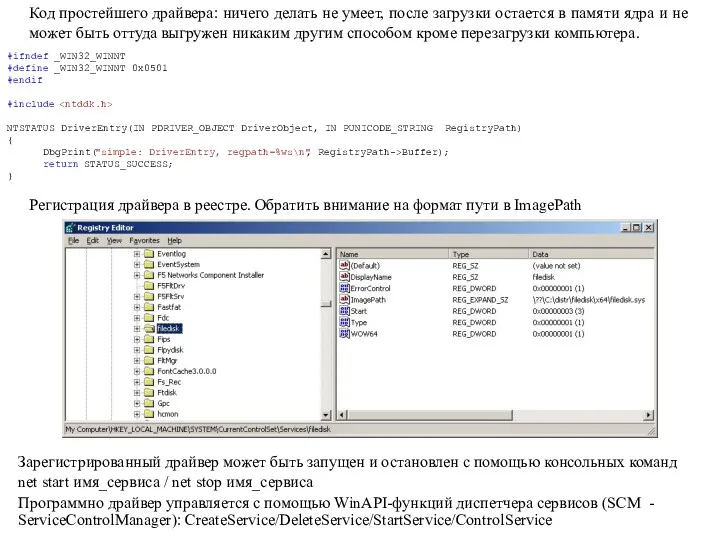
- 59. #ifndef _WIN32_WINNT #define _WIN32_WINNT 0x0501 #endif #include NTSTATUS DriverEntry(IN PDRIVER_OBJECT DriverObject, IN PUNICODE_STRING RegistryPath) { DbgPrint("simple:
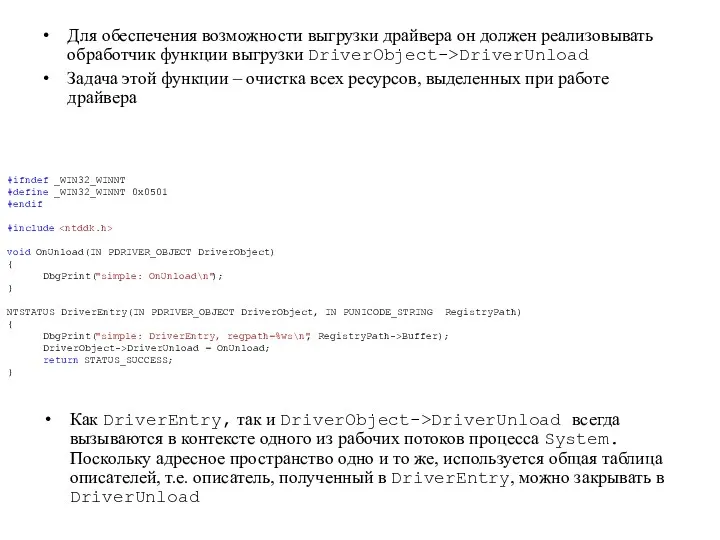
- 60. #ifndef _WIN32_WINNT #define _WIN32_WINNT 0x0501 #endif #include void OnUnload(IN PDRIVER_OBJECT DriverObject) { DbgPrint("simple: OnUnload\n"); } NTSTATUS
- 61. Регистрация и запуск/остановка драйвера Внести изменения в reg-файл (в директории с проектом драйвера): "Start"=dword:00000003 "ImagePath"="\\??\\c:\\work\\drv\\l1\\l1\\x64\\Debug\\l1.sys“ (путь
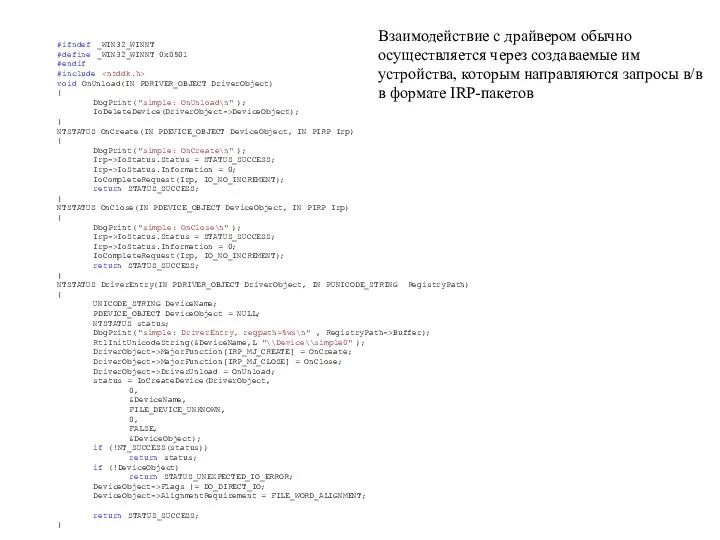
- 62. #ifndef _WIN32_WINNT #define _WIN32_WINNT 0x0501 #endif #include void OnUnload(IN PDRIVER_OBJECT DriverObject) { DbgPrint("simple: OnUnload\n"); IoDeleteDevice(DriverObject->DeviceObject); }
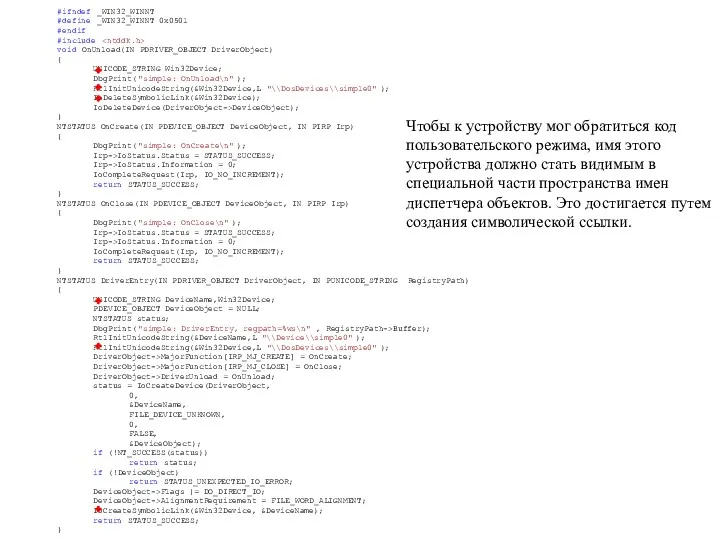
- 63. #ifndef _WIN32_WINNT #define _WIN32_WINNT 0x0501 #endif #include void OnUnload(IN PDRIVER_OBJECT DriverObject) { UNICODE_STRING Win32Device; DbgPrint("simple: OnUnload\n");
- 64. Взаимосвязь основных ядерных объектов при прохождении запроса в/в
- 65. DRIVER_OBJECT Найти устройство по имени int 2E SYSCALL SYSENTER DeviceObject MajorFunction[] DriverUnload() CreateFile(filename, …) NtCreateFile(filename, …)
- 66. DRIVER_OBJECT Найти файловый объект по описателю int 2E SYSCALL SYSENTER DeviceObject MajorFunction[] DriverUnload() ReadFile(hfile, …) NtReadFile(hfile,
- 67. Структура управляющей программы Функции WinAPI OpenSCManager() CreateService() DeleteService() StartService() ControlService() CloseServiceHandle() CreateFile() CloseHandle() Решаемая задача 1.
- 68. Как выяснилось большинство из вас нифига не помнят/не знают базовые вещи по языку С/С++, а потому
- 69. В английском языке для c/cpp используется ДВА термина: declaration (объявление), описывает переменную некоторого типа НО НЕ
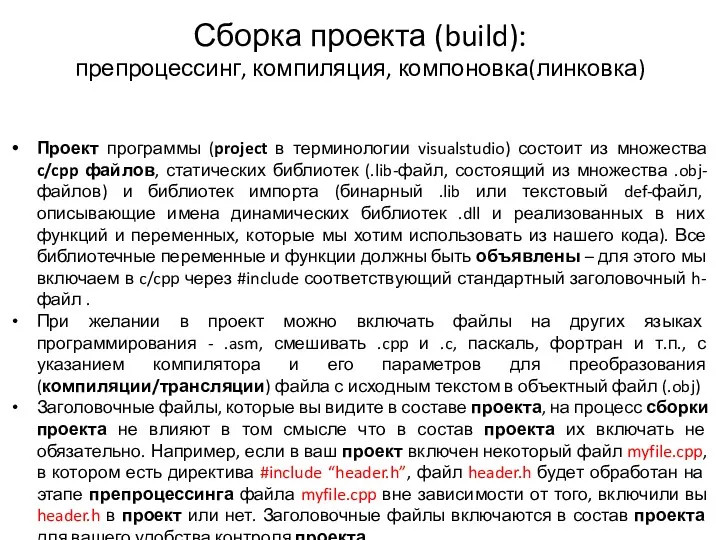
- 70. Сборка проекта (build): препроцессинг, компиляция, компоновка(линковка) Проект программы (project в терминологии visualstudio) состоит из множества c/cpp
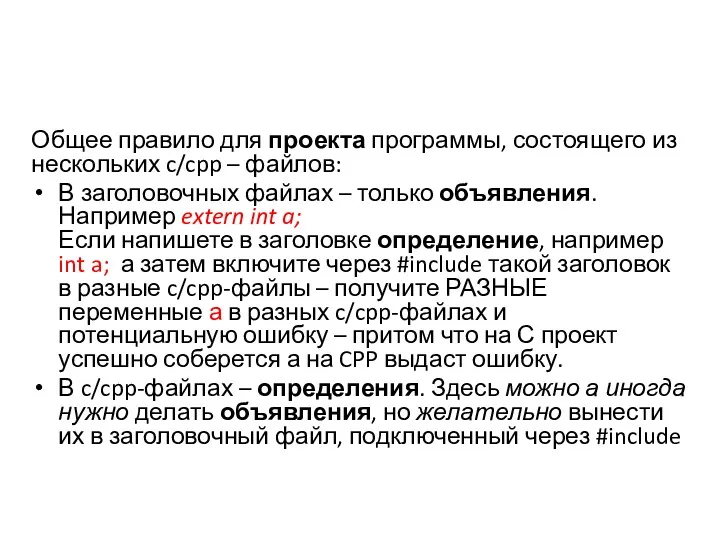
- 71. Общее правило для проекта программы, состоящего из нескольких c/cpp – файлов: В заголовочных файлах – только
- 72. Каждый c/cpp-файл является единицей компиляции и НЕЗАВИСИМО от остальных файлов проекта проходит через этапы: Препроцессинг: все
- 73. Компиляция: генерация псевдокода в терминах некоторого промежуточного языка (трехадресный код, llvm-представление) или сразу в виде команд
- 74. После того как все файлы проекта без ошибок прошли препроцессинг и компиляцию, происходит этап компоновки он
- 75. .h .h file1.cpp file2.cpp file4.asm Компилятор языка c++ Транслятор языка ассемблер Препроцессор языка c++ Препроцессор языка
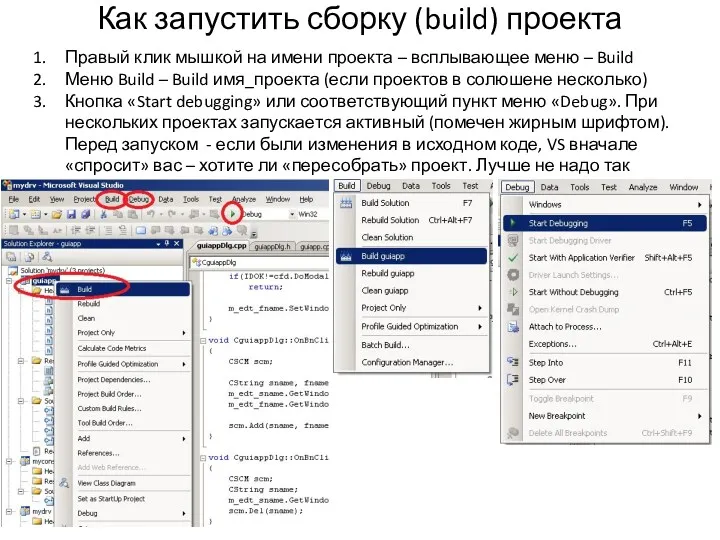
- 76. Как запустить сборку (build) проекта Правый клик мышкой на имени проекта – всплывающее меню – Build
- 77. Как запустить компиляцию конкретного c/cpp-файла или единицы компиляции Правый клик мышкой на имени файла – всплывающее
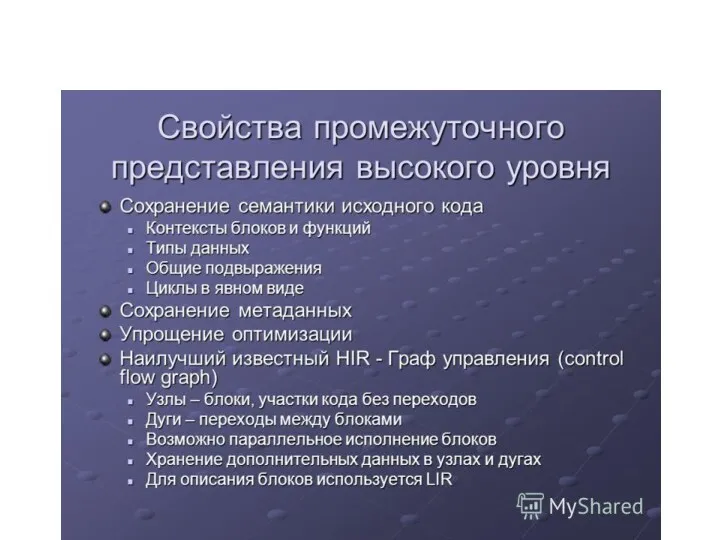
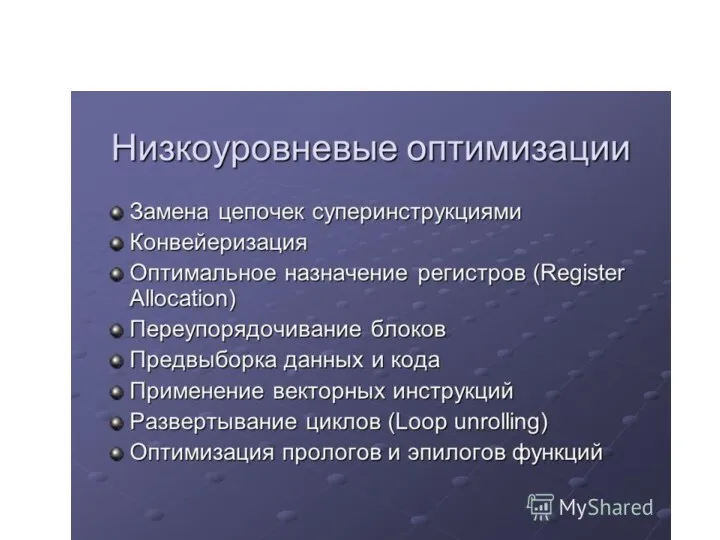
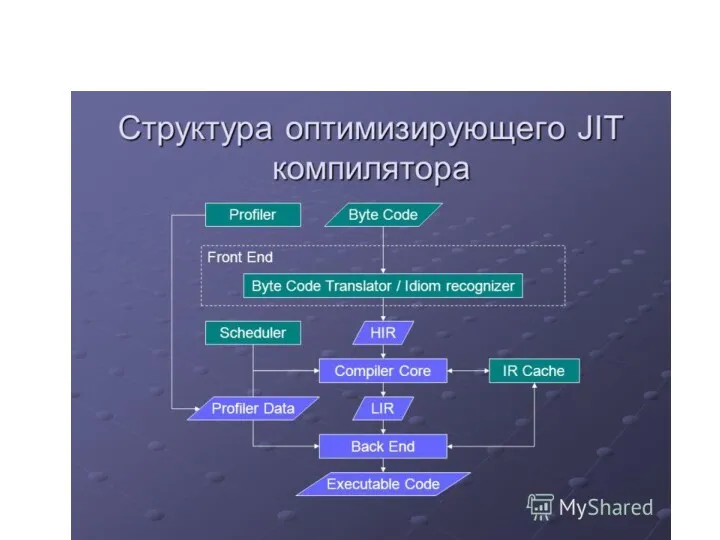
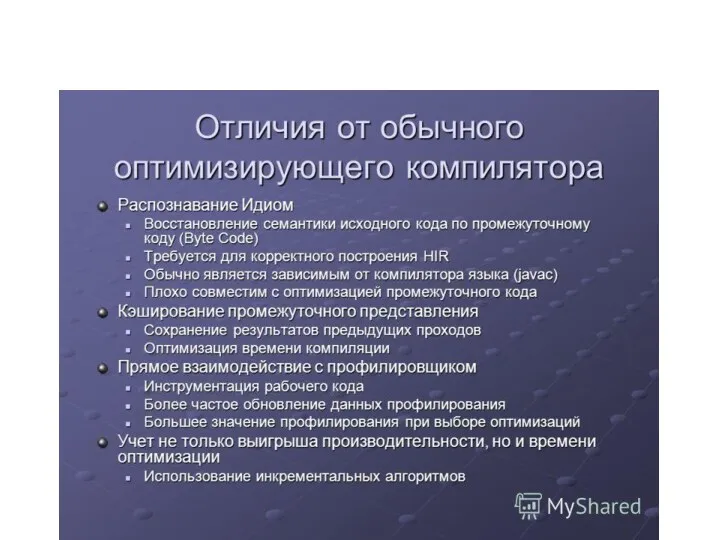
- 85. Оптимизация как часть процесса компиляции Сам процесс компиляции довольно сложен и является объектом научных исследований в
- 100. Дополнительные ссылки «Для чайников» про то же, но в gcc: https://habr.com/ru/post/478124/ А вот «продвинутая» статья по
- 101. Precompiled headers - предварительно откомпилированные заголовки Количество строк кода в стандартных заголовочных файлах операционной системы как
- 102. Для этого надо сделать три вещи: в свойствах проекта в настройках компилятора С/С++ в подпункте Precompiled
- 103. В свойствах каждого c/cpp-файла, для которого хотим задействовать процесс предварительной компиляции заголовков, делаем то же самое,
- 104. В текст c/cpp-файла, для которого хотим задействовать процесс предварительной компиляции заголовков, через #include включить заголовочный файл,
- 105. В текст предварительно компилируемого h-файла, указанного в настройках предварительной компиляции (у нас это stdafx.h), через #include
- 106. Теперь возвращаемся к структуре текущего проекта на следующем слайде - упрощенная схема проекта с пояснениями попытайтесь
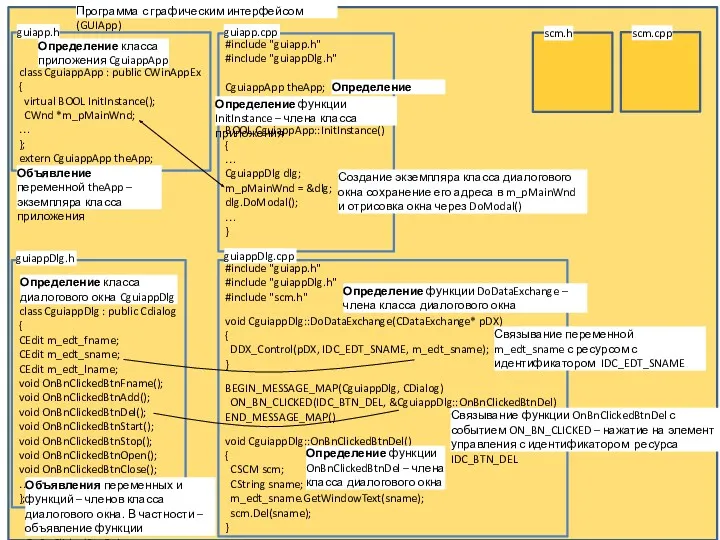
- 107. Программа с графическим интерфейсом (GUIApp) scm.h scm.cpp class CguiappApp : public CWinAppEx { virtual BOOL InitInstance();
- 108. Программа с графическим интерфейсом (GUIApp) Консольная программа(TestCons) class CguiappApp : public CWinAppEx { virtual BOOL InitInstance();
- 109. В классе CSCM хотим сделать аналог функции printf, которая печатает диагностические сообщения Первый параметр – строка
- 110. Программа с графическим интерфейсом (GUIApp) Консольная программа(TestCons) class CguiappApp : public CWinAppEx { virtual BOOL InitInstance();
- 111. Кроме обычной форматированной печати строки, нужно уметь получать код и выводить текстовое описание ошибок, возникающих при
- 112. Программа с графическим интерфейсом (GUIApp) Консольная программа(TestCons) class CguiappApp : public CWinAppEx { virtual BOOL InitInstance();
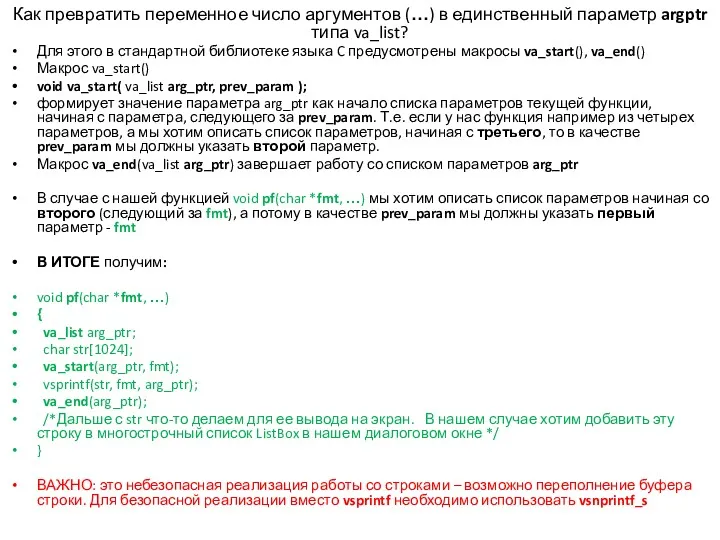
- 113. Два вопроса: как превратить переменное число аргументов (…) в единственный параметр argptr типа va_list? Как получить
- 114. Как превратить переменное число аргументов (…) в единственный параметр argptr типа va_list? Для этого в стандартной
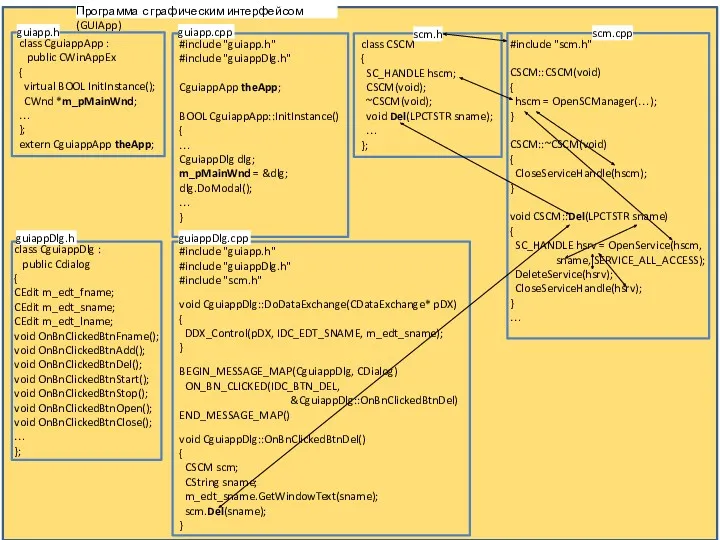
- 115. Мы хотим сделать наш класс управления сервисами CSCM быстро переносимым в другие проекты, в частности в
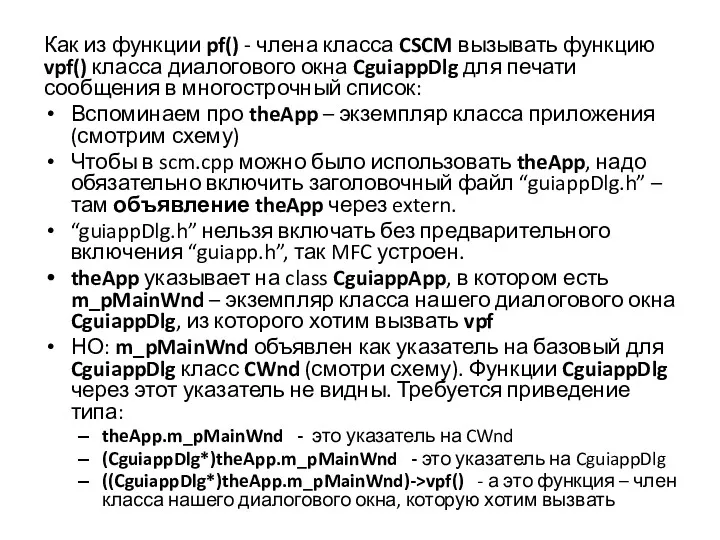
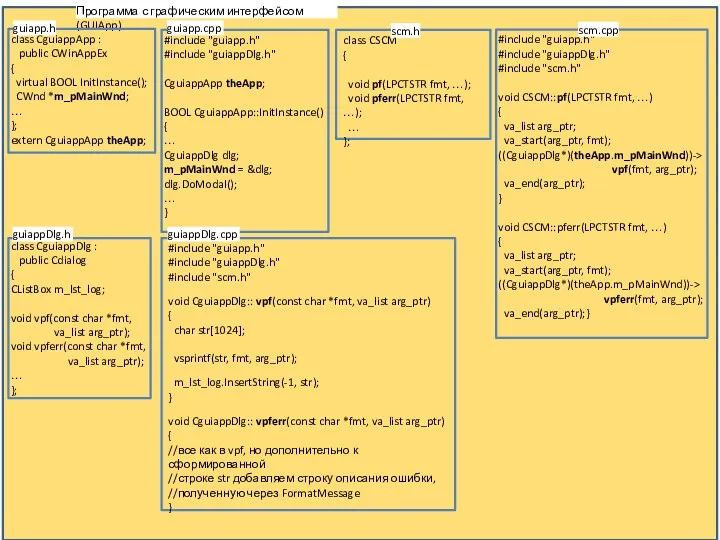
- 116. Как из функции pf() - члена класса CSCM вызывать функцию vpf() класса диалогового окна CguiappDlg для
- 117. Программа с графическим интерфейсом (GUIApp) Консольная программа(TestCons) class CguiappApp : public CWinAppEx { virtual BOOL InitInstance();
- 118. Пример переноса CSCM в консольную программу (TestCons) – когда надо управлять драйвером без использования GUI #include
- 119. Как получить код ошибок и текстовое описание ошибок, возникающих при работе системных WinAPI-функций? Использование функций FormatMessage()
- 120. Пример использования функции FormatMessage совместно с GetLastError LPVOID lpMsgBuf; char str[2048]; str[2047] = ‘\0’; FormatMessage( FORMAT_MESSAGE_ALLOCATE_BUFFER
- 121. Примеры анализа драйвера Использование дизассемблера IDA Pro Использование среды анализа TREX
- 122. Отладочные возможности процессора, особенности в Windows, средства отладки Пошаговая отладка: TraceFlag в регистре флагов Точки прерывания:
- 123. Проблемы программных отладчиков Конкуренция с отлаживаемой программой за общие ресурсы: программные отладчики могут быть выявлены путем
- 124. «Классические» отладчики уровня ОС фактически вытеснены отладочными возможностями симуляторов: backend: VmWare frontend: интерфейс GDB (IDA, VisualStudio,
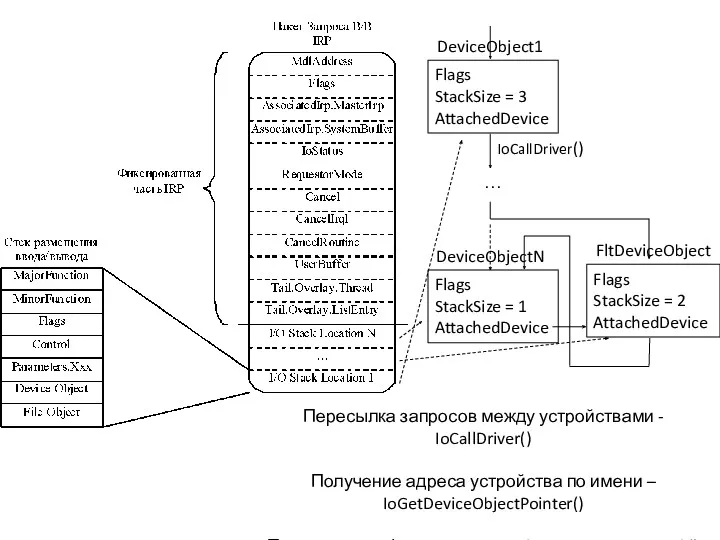
- 125. Взаимодействие с устройствами ReadFile – ZwReadFile – IRP_MJ_READ WriteFile – ZwWriteFile – IRP_MJ_WRITE DeviceIoControl – ZwDeviceIoControl
- 126. Flags StackSize = 3 AttachedDevice Flags StackSize = 1 AttachedDevice … Пересылка запросов между устройствами -
- 127. Драйвера подразделяются на 3 класса по их положению в стеке драйверов: драйвера высшего уровня, драйвера промежуточного
- 128. Число стеков размещения в/в устанавливается Диспетчером в/в в поле StackSize объекта-устройство. По умолчанию это значение равно
- 129. Код запроса в/в сохранен в поле MajorFunction (есть еще второстепенный код MinorFunction) текущего стека размещения ввода
- 130. BOOL WINAPI ReadFile( __in HANDLE hFile, __out LPVOID lpBuffer, __in DWORD nNumberOfBytesToRead, __out_opt LPDWORD lpNumberOfBytesRead, __inout_opt
- 131. BOOL WINAPI WriteFile( __in HANDLE hFile, __in LPCVOID lpBuffer, __in DWORD nNumberOfBytesToWrite, __out_opt LPDWORD lpNumberOfBytesWritten, __inout_opt
- 132. По адресу lpNumberOfBytesRead/ lpNumberOfBytesWritten в результате успешного завершения функции помещается содержимое поля Irp->IoStatus.Information диспетчерской функции драйвера,
- 133. Метод передачи буфера, используемый в запросах чтения и записи, контролируется полем Flags объекта-устройство (DeviceObject->Flags). После создания
- 135. Размер буфера для операций чтения/записи расположен в стеке размещения в/в: Stack->Parameters.Read.Length Stack->Parameters.Write.Length С точки зрения языка
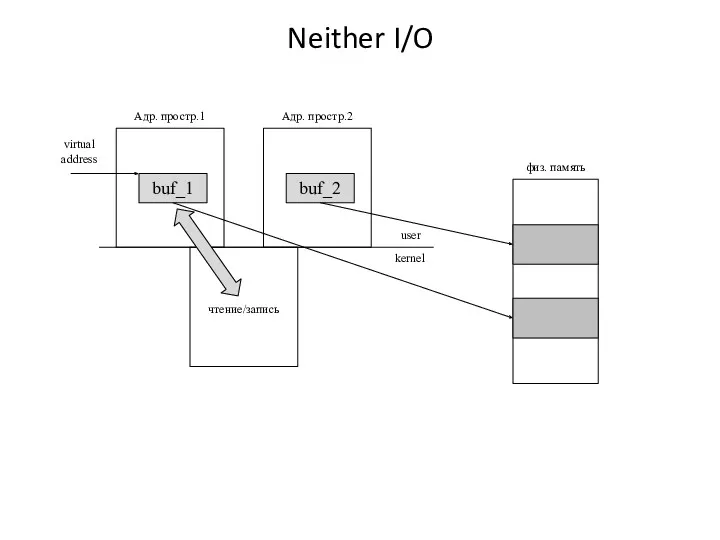
- 136. Neither I/O buf_1 user kernel virtual address Адр. простр.1 Адр. простр.2 buf_2 физ. память чтение/запись
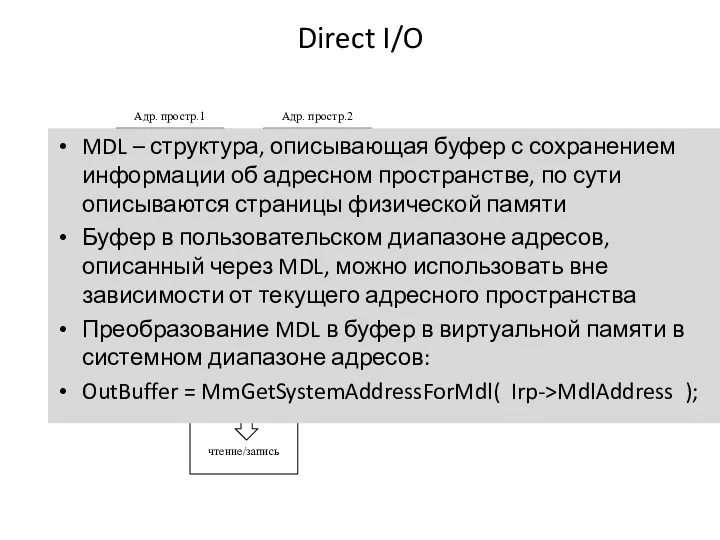
- 137. Direct I/O buf_1 user kernel virtual address Адр. простр.1 Адр. простр.2 buf_2 физ. память buf_3 MDL
- 138. Buffered I/O buf_1 user kernel virtual address Адр. простр.1 Адр. простр.2 buf_2 физ. память buf_3 Буфер
- 139. BOOL WINAPI DeviceIoControl( __in HANDLE hDevice, __in DWORD dwIoControlCode, __in_opt LPVOID lpInBuffer, __in DWORD nInBufferSize, __out_opt
- 140. По адресу lpBytesReturned в результате успешного завершения функции помещается содержимое поля Irp->IoStatus.Information диспетчерской функции драйвера, обработавшего
- 141. CTL_CODE( DeviceType, Function, Method, Access ) DeviceType определяет тип объекта-устройство, которому предназначен запрос. Это тот самый
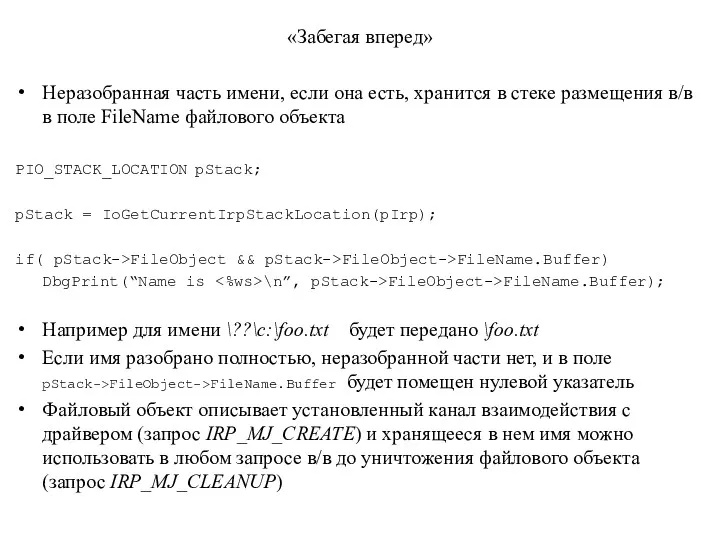
- 143. METHOD_BUFFERED InBuf[InBufferSize ] OutBuf[OutBufferSize ] Промежуточный буфер [max(InBufferSize, OutBufferSize)] Irp->AssociatedIrp.SystemBuffer 1. Перед вызовом IRP_MJ_DEVICE_CONTROL копируется InBufferSize
- 144. Механизмы синхронизации Спин-блокировки – для межпроцессорной синхронизации, синхронизации на уровне IRQL=DISPATCH_LEVEL (обычные блокировки) или >DISPATCH_LEVEL (DIRQL)(блокировки
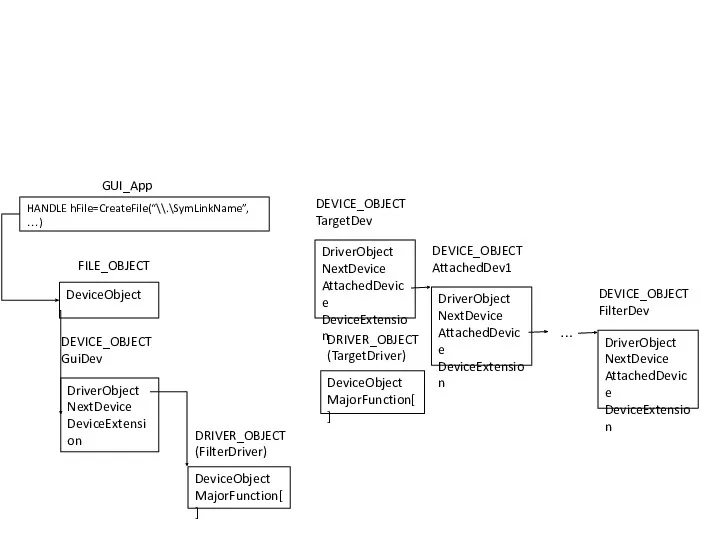
- 145. GUI_App HANDLE hFile=CreateFile(“\\.\SymLinkName”, …) FILE_OBJECT DeviceObject DEVICE_OBJECT GuiDev DriverObject NextDevice DeviceExtension DeviceObject MajorFunction[] DRIVER_OBJECT (FilterDriver) DEVICE_OBJECT
- 146. IoGetDeviceObjectPointer() – по имени устройства получаем его DEVICE_OBJECT (TargetDevice) IoCreateDevice() создаем FilterDevice IoAttachDeviceToDeviceStack() подключаем FilterDevicve к
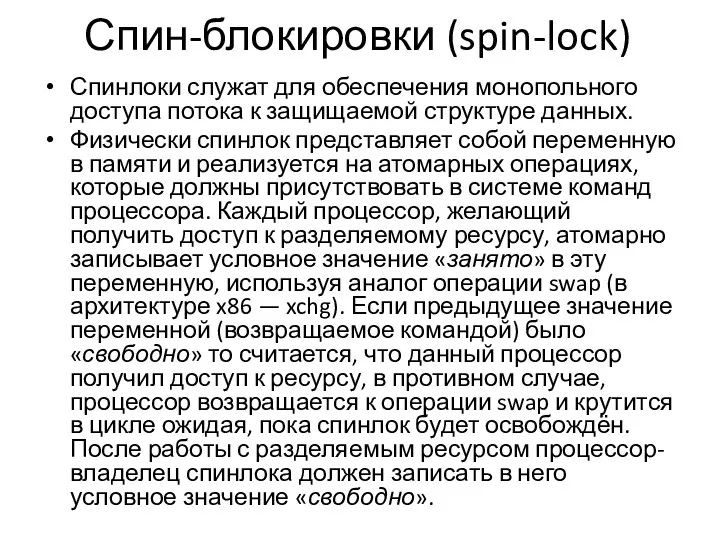
- 147. Спин-блокировки (spin-lock) Спинлоки служат для обеспечения монопольного доступа потока к защищаемой структуре данных. Физически спинлок представляет
- 148. Пример реализации спин-блокировки (для ядра Windows неверен) mov eax, spinlock_address mov ebx, SPINLOCK_BUSY wait_cycle: lock xchg
- 149. Поток 1 Поток 2 SP 1. 2. 4,5... CPU 3. IRQL=PASSIVE_LEVEL IRQL=PASSIVE_LEVEL 6. 7. 9. 8.
- 150. Поток 1 Поток 2 SP Квантование времени выключено, переключение на поток1 невозможно deadlock 2. 4,5... CPU
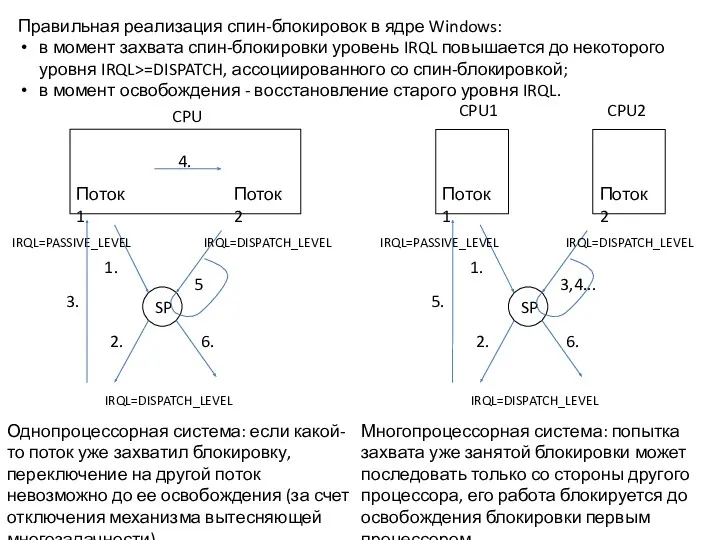
- 151. Поток 1 Поток 2 SP 1. 2. 3,4... CPU1 IRQL=PASSIVE_LEVEL IRQL=DISPATCH_LEVEL 5. 6. IRQL=DISPATCH_LEVEL Поток 1
- 152. С каждой спин-блокировкой связан конкретный уровень IRQL, на который перейдет процессор после захвата блокировки. В соответствии
- 153. Функции для работы с обычными спин-блокировками VOID KeInitializeSpinLock(IN PKSPIN_LOCK SpinLock); VOID KeAcquireSpinLock(IN PKSPIN_LOCK SpinLock, OUT PKIRQL
- 154. Взаимоблокировки (deadlocks) Решение: блокировки должны захватываться всеми потоками в одном порядке Поток 1 Поток 2 SP1
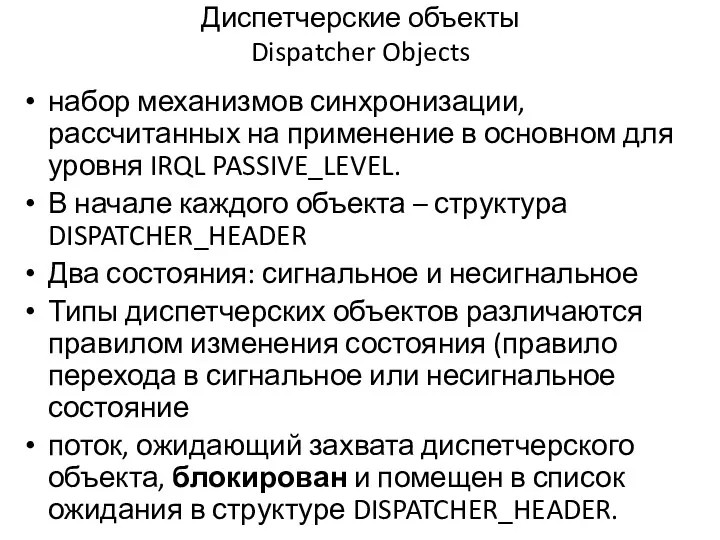
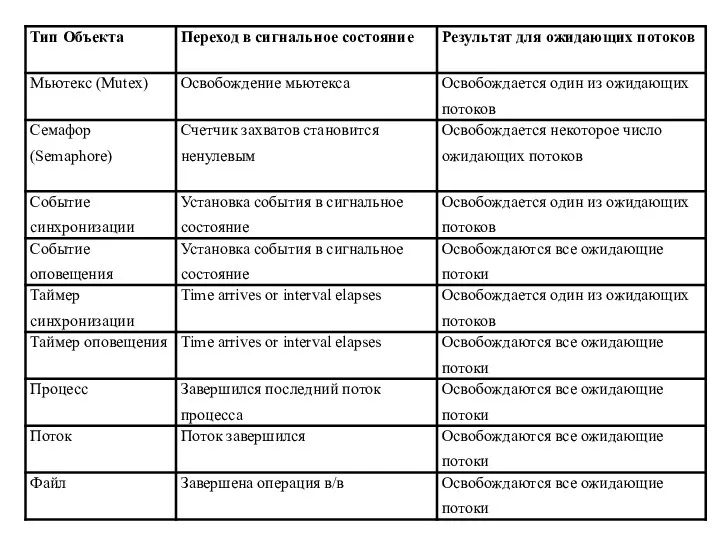
- 155. Диспетчерские объекты Dispatcher Objects набор механизмов синхронизации, рассчитанных на применение в основном для уровня IRQL PASSIVE_LEVEL.
- 156. Блокирование потока – состояние потока, при котором он не занимает время процессора. Блокированный поток не будет
- 158. Диспетчерские объекты могут иметь имена в пространстве имен диспетчера объектов (обычно директория \BaseNamedObjects) Через эти имена
- 159. Ожидание (захват) диспетчерских объектов Для ожидания момента перехода объекта из несигнального в сигнальное состояние служат специальные
- 160. Мьютексы ядра Мьютекс (mutex = Mutually EXclusive) означает взаимоисключение, т.е. мьютекс обеспечивает нескольким потокам взаимоисключающий доступ
- 161. VOID KeInitializeMutex(IN PKMUTEX Mutex, IN ULONG Level); LONG KeReleaseMutex(IN PKMUTEX Mutex, IN BOOLEAN Wait); Если параметр
- 162. семафор более гибкая форма мьютексов. В отличие от мьютексов, программа имеет контроль над тем, сколько потоков
- 163. LONG KeReleaseSemaphore( _Inout_ PRKSEMAPHORE Semaphore, _In_ KPRIORITY Increment, _In_ LONG Adjustment, _In_ BOOLEAN Wait ); Adjustment:
- 164. Использование семафоров: задача «потребители – производители» WaitFor… Потоки - производители S2 S1 WaitFor… ReleaseSemaphore ReleaseSemaphore Потоки
- 165. События (events) Позволяют проводить синхронизацию исполнения различных потоков, т.е. один или несколько потоков могут ожидать перевода
- 167. Скачать презентацию
Применение знаний ядра ОС
Средства защиты информации – системы шифрования сетевого трафика,
Применение знаний ядра ОС
Средства защиты информации – системы шифрования сетевого трафика,
Применение знаний при разработке инфраструктуры анализа бинарного кода
Драйвер получения информации: список
Применение знаний при разработке инфраструктуры анализа бинарного кода
Драйвер получения информации: список
Структура курса
Лекции + лабораторные задания:
простейший драйвер ядра
создание устройств и символических ссылок
Структура курса
Лекции + лабораторные задания:
простейший драйвер ядра
создание устройств и символических ссылок
Программное обеспечение и литература
Среда разработки для выполнения лабораторных работ развернута на
Программное обеспечение и литература
Среда разработки для выполнения лабораторных работ развернута на
VisualStudio 2008/2010 (WS 2010 не рекомендуется при отсутствии подключения к интернету)
Пакет
VisualStudio 2008/2010 (WS 2010 не рекомендуется при отсутствии подключения к интернету)
Пакет
Основные понятия
Процессы, потоки и адресные пространства в ОС Windows: взаимосвязь с
Основные понятия
Процессы, потоки и адресные пространства в ОС Windows: взаимосвязь с
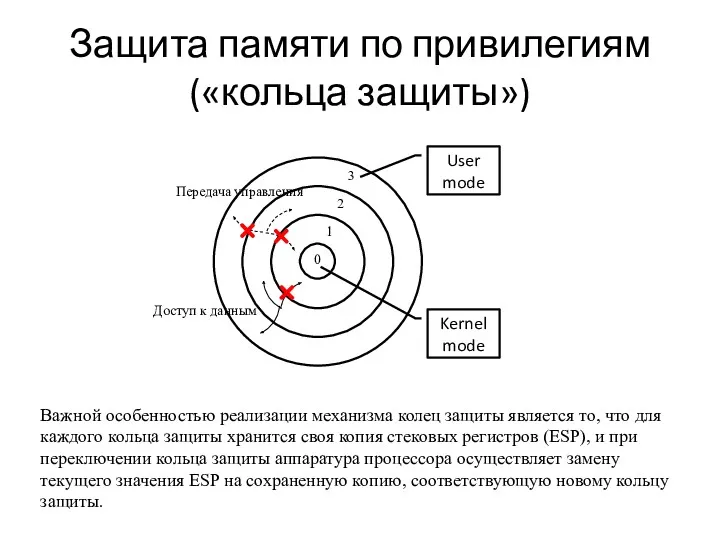
Защита памяти по привилегиям («кольца защиты»)
0
1
2
3
User mode
Kernelmode
Передача управления
Доступ к данным
Важной особенностью
Защита памяти по привилегиям («кольца защиты»)
0
1
2
3
User mode
Kernelmode
Передача управления
Доступ к данным
Важной особенностью
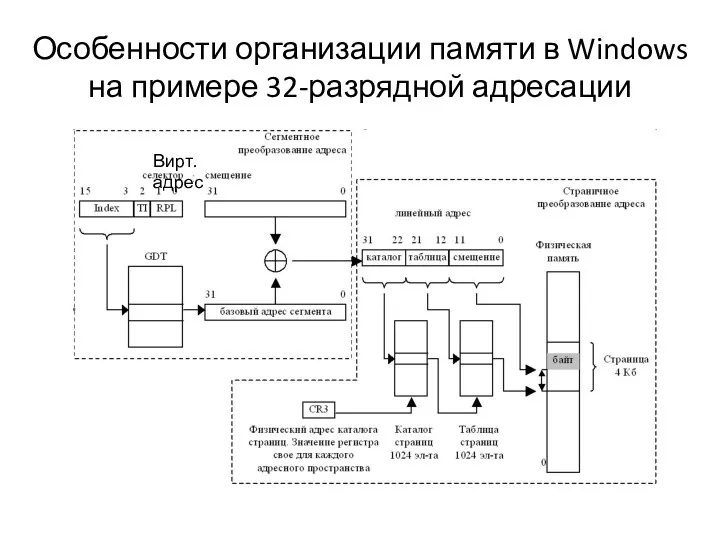
Особенности организации памяти в Windows на примере 32-разрядной адресации
Вирт. адрес
Особенности организации памяти в Windows на примере 32-разрядной адресации
Вирт. адрес
VMCS
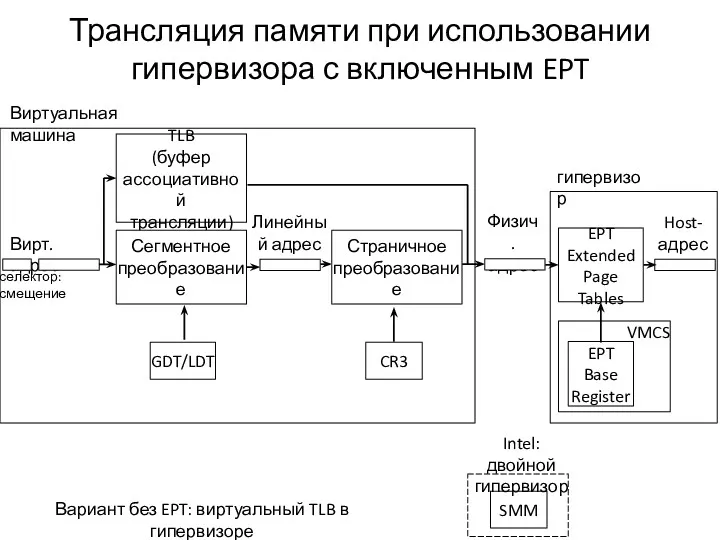
Трансляция памяти при использовании гипервизора с включенным EPT
Вирт. адрес
селектор:смещение
TLB
(буфер ассоциативной трансляции)
Линейный
VMCS
Трансляция памяти при использовании гипервизора с включенным EPT
Вирт. адрес
селектор:смещение
TLB
(буфер ассоциативной трансляции)
Линейный
ОС NT, хотя и использует селекторы, но использует их в минимальной
ОС NT, хотя и использует селекторы, но использует их в минимальной
Реальная защита памяти по привилегиям, как и реализация понятия адресное пространство,
Реальная защита памяти по привилегиям, как и реализация понятия адресное пространство,

Виртуальное адресное пространство процесса
0
2Гб
4Гб
user
kernel
0
3Гб
4Гб
user
kernel
Код и данные прикладных программ
Код и данные ядра,
Виртуальное адресное пространство процесса
0
2Гб
4Гб
user
kernel
0
3Гб
4Гб
user
kernel
Код и данные прикладных программ
Код и данные ядра,
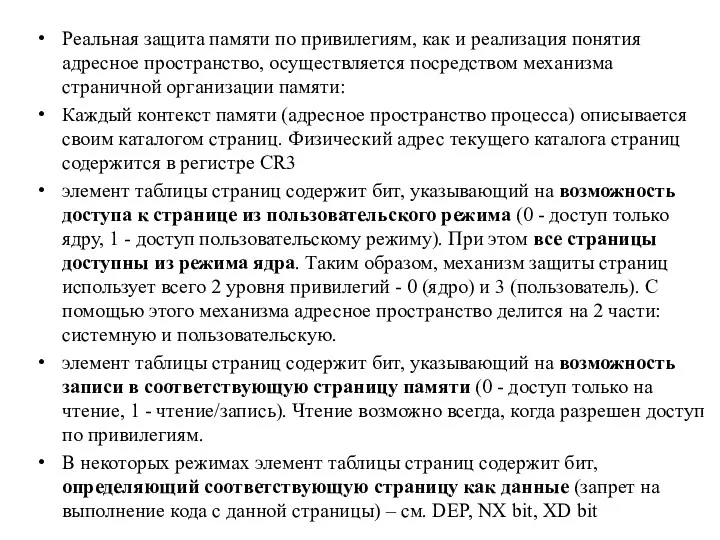
Каталоги страниц всех процессов организованы так, что преобразование линейного в физический
Каталоги страниц всех процессов организованы так, что преобразование линейного в физический
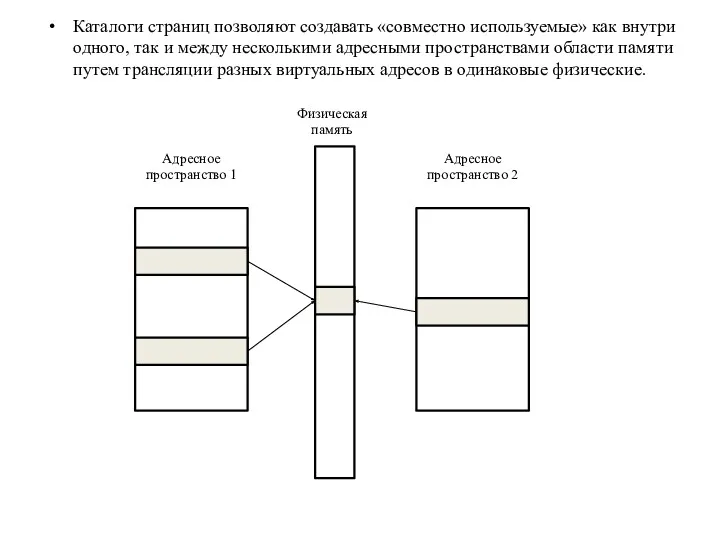
Каталоги страниц позволяют создавать «совместно используемые» как внутри одного, так и
Каталоги страниц позволяют создавать «совместно используемые» как внутри одного, так и
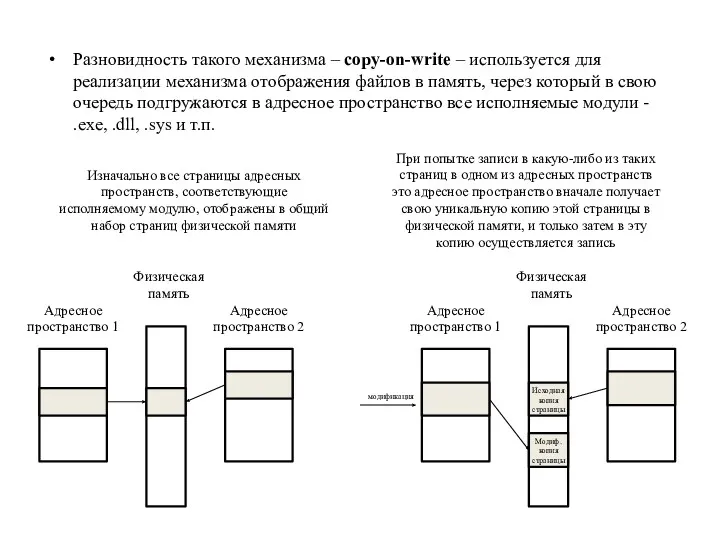
Разновидность такого механизма – copy-on-write – используется для реализации механизма отображения
Разновидность такого механизма – copy-on-write – используется для реализации механизма отображения
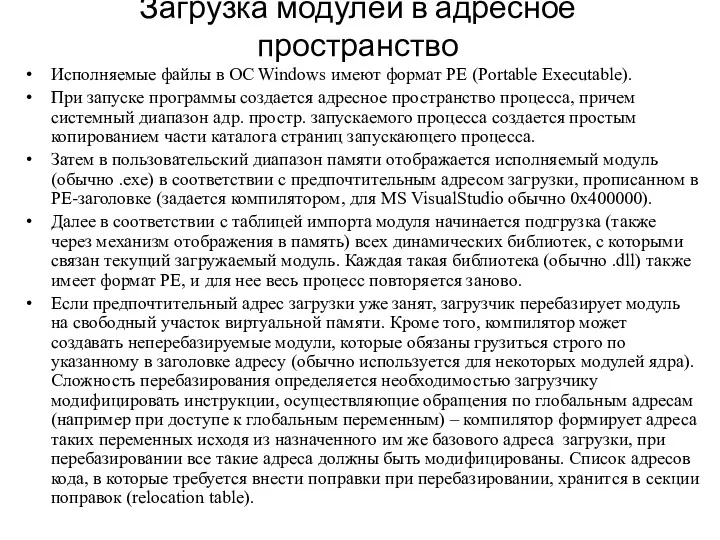
Загрузка модулей в адресное пространство
Исполняемые файлы в ОС Windows имеют формат
Загрузка модулей в адресное пространство
Исполняемые файлы в ОС Windows имеют формат
При завершении загрузки модуля со всеми его зависимостями управление передается на
При завершении загрузки модуля со всеми его зависимостями управление передается на
Поддержка многозадачности
Механизм аппаратной поддержки многозадачности, предоставляемый архитектурой x86 (task switching) –
Поддержка многозадачности
Механизм аппаратной поддержки многозадачности, предоставляемый архитектурой x86 (task switching) –
Основные понятия: подведение итогов
Процесс – соответствует некоторому запущенному в ОС приложению.
Основные понятия: подведение итогов
Процесс – соответствует некоторому запущенному в ОС приложению.
Адресное пространство – диапазон виртуальных адресов, доступный процессу.
Для некоторой части
Адресное пространство – диапазон виртуальных адресов, доступный процессу.
Для некоторой части
TSS – Task State Segment
Процессор определяет 5 структур для организации переключения
TSS – Task State Segment
Процессор определяет 5 структур для организации переключения
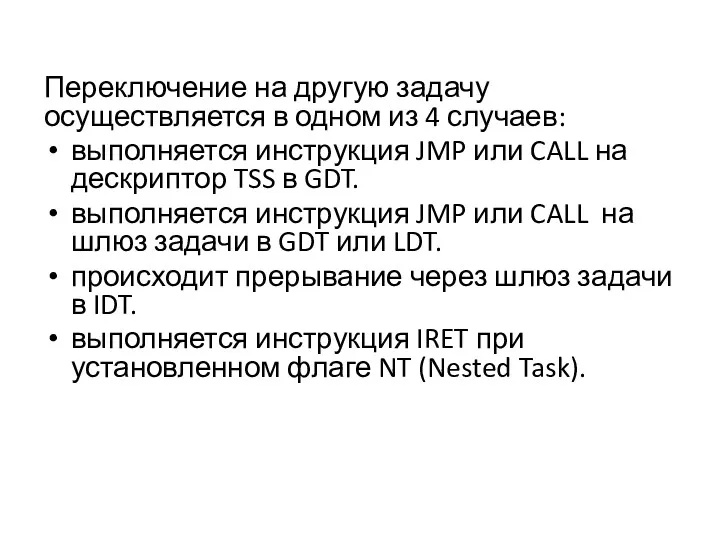
Переключение на другую задачу осуществляется в одном из 4 случаев:
выполняется инструкция
Переключение на другую задачу осуществляется в одном из 4 случаев:
выполняется инструкция
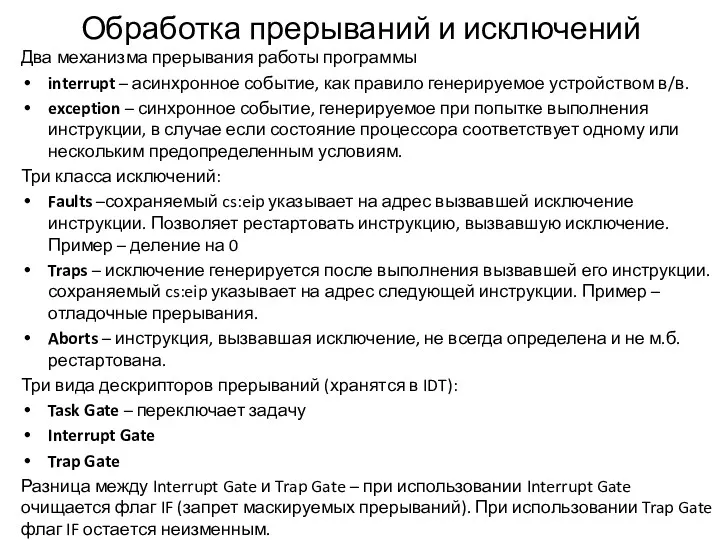
Обработка прерываний и исключений
Два механизма прерывания работы программы
interrupt – асинхронное событие,
Обработка прерываний и исключений
Два механизма прерывания работы программы
interrupt – асинхронное событие,
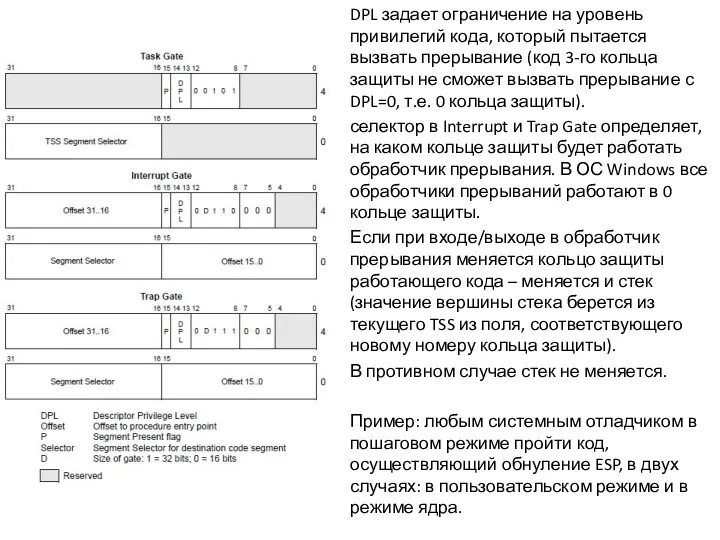
DPL задает ограничение на уровень привилегий кода, который пытается вызвать прерывание
DPL задает ограничение на уровень привилегий кода, который пытается вызвать прерывание
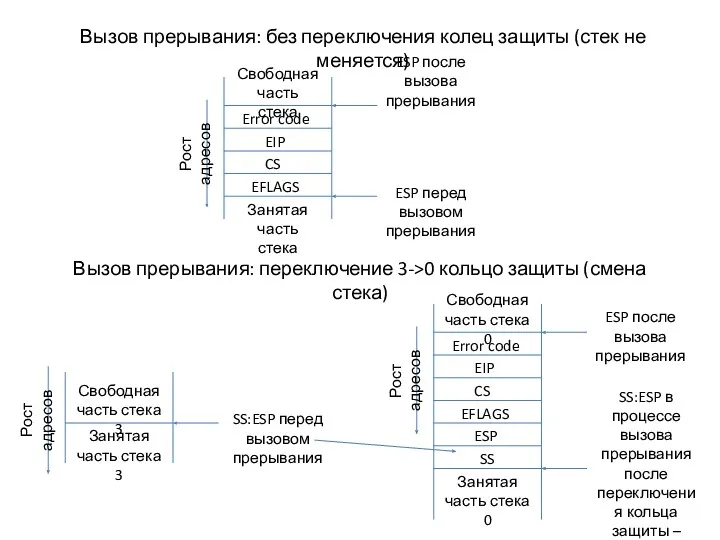
EFLAGS
EIP
CS
Error code
Свободная часть стека
Занятая часть стека
ESP перед вызовом прерывания
ESP после вызова
EFLAGS
EIP
CS
Error code
Свободная часть стека
Занятая часть стека
ESP перед вызовом прерывания
ESP после вызова
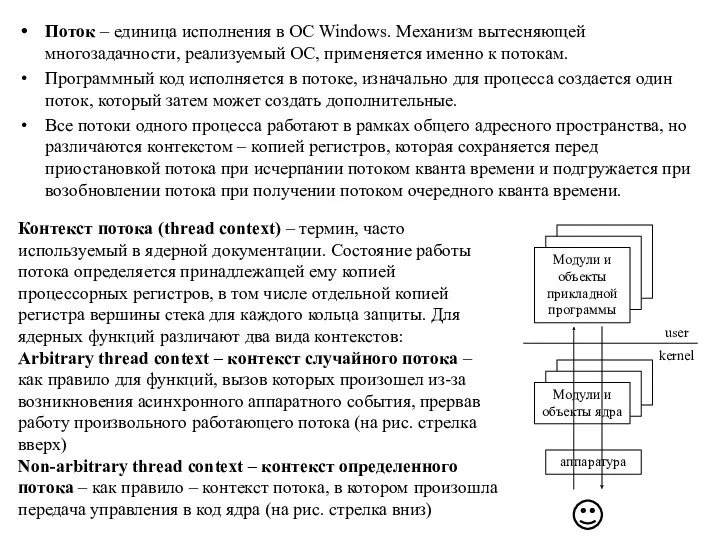
Поток – единица исполнения в ОС Windows. Механизм вытесняющей многозадачности, реализуемый
Поток – единица исполнения в ОС Windows. Механизм вытесняющей многозадачности, реализуемый
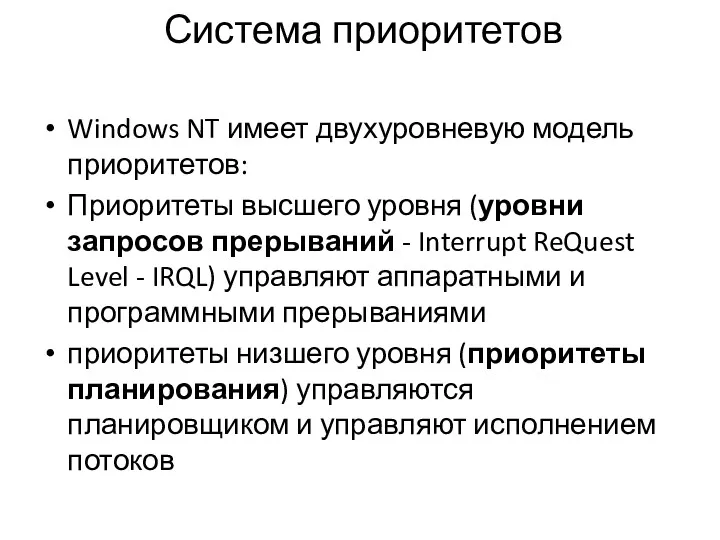
Система приоритетов
Windows NT имеет двухуровневую модель приоритетов:
Приоритеты высшего уровня (уровни запросов
Система приоритетов
Windows NT имеет двухуровневую модель приоритетов:
Приоритеты высшего уровня (уровни запросов
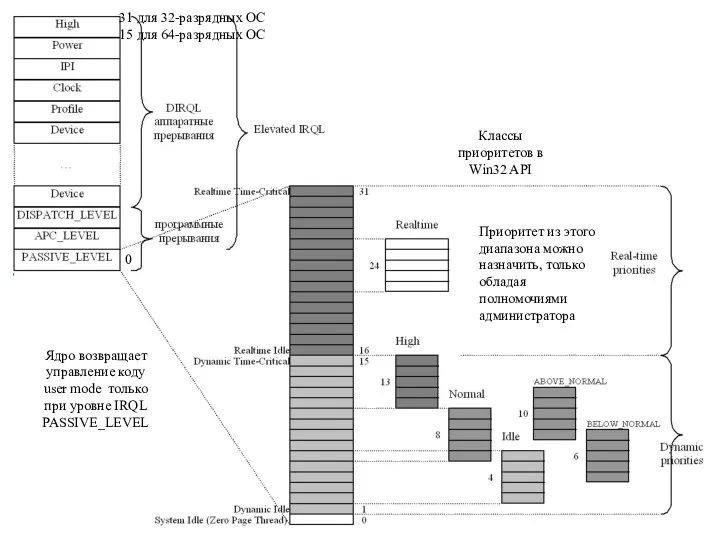
Классы приоритетов в Win32 API
0
31 для 32-разрядных ОС
15 для 64-разрядных ОС
Приоритет
Классы приоритетов в Win32 API
0
31 для 32-разрядных ОС
15 для 64-разрядных ОС
Приоритет
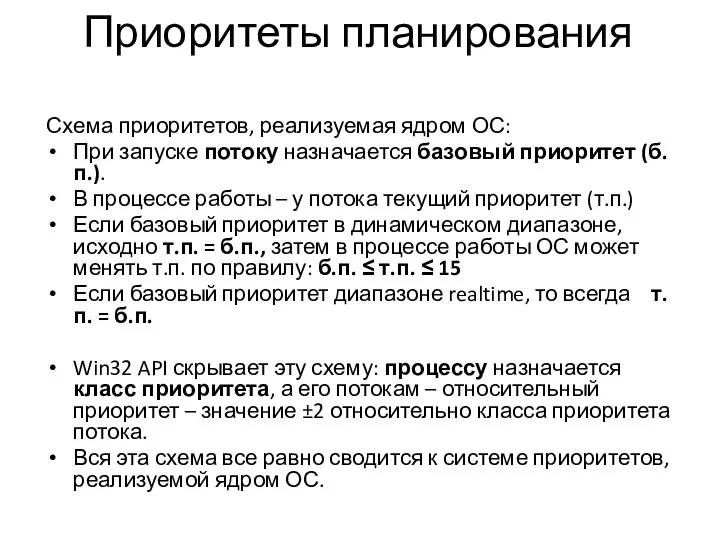
Приоритеты планирования
Схема приоритетов, реализуемая ядром ОС:
При запуске потоку назначается базовый приоритет
Приоритеты планирования
Схема приоритетов, реализуемая ядром ОС:
При запуске потоку назначается базовый приоритет
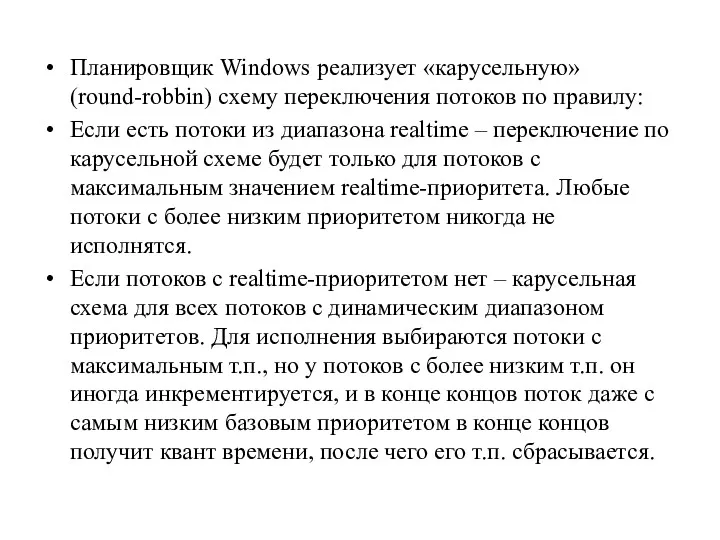
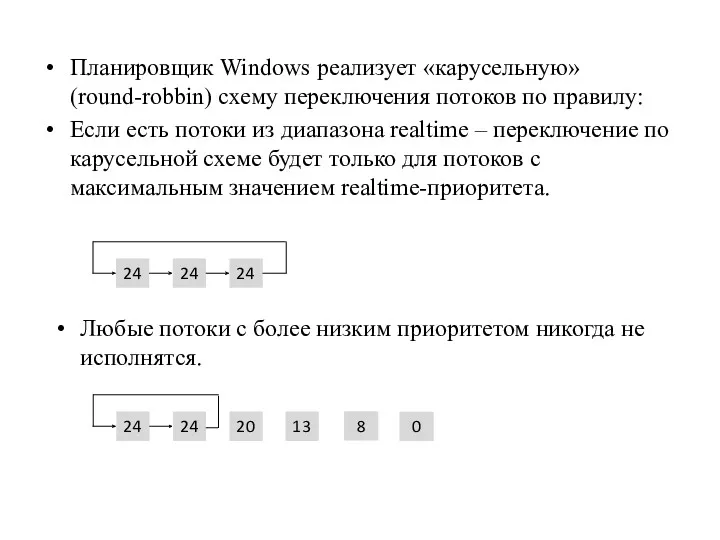
Планировщик Windows реализует «карусельную» (round-robbin) схему переключения потоков по правилу:
Если есть
Планировщик Windows реализует «карусельную» (round-robbin) схему переключения потоков по правилу:
Если есть
Планировщик Windows реализует «карусельную» (round-robbin) схему переключения потоков по правилу:
Если есть
Планировщик Windows реализует «карусельную» (round-robbin) схему переключения потоков по правилу:
Если есть
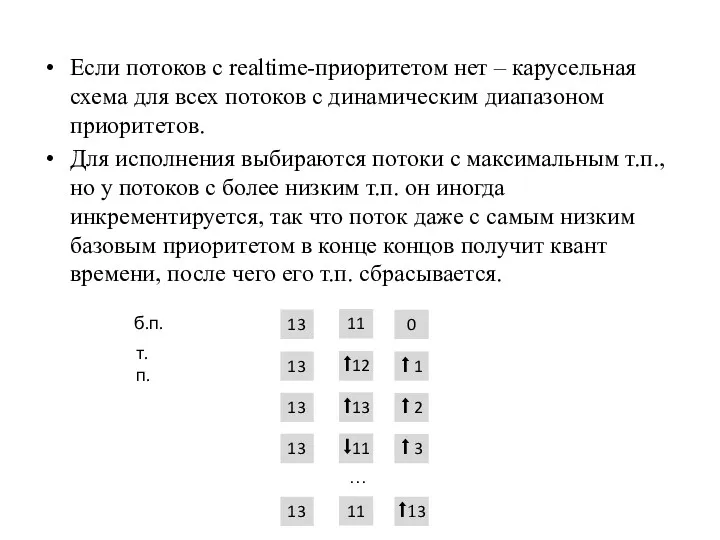
Если потоков с realtime-приоритетом нет – карусельная схема для всех потоков
Если потоков с realtime-приоритетом нет – карусельная схема для всех потоков

Диаграмма состояния потоков
Диаграмма состояния потоков
Готов (Ready). Поток готов к выполнению/рестарту после завершения ожидания. При поиске
Готов (Ready). Поток готов к выполнению/рестарту после завершения ожидания. При поиске
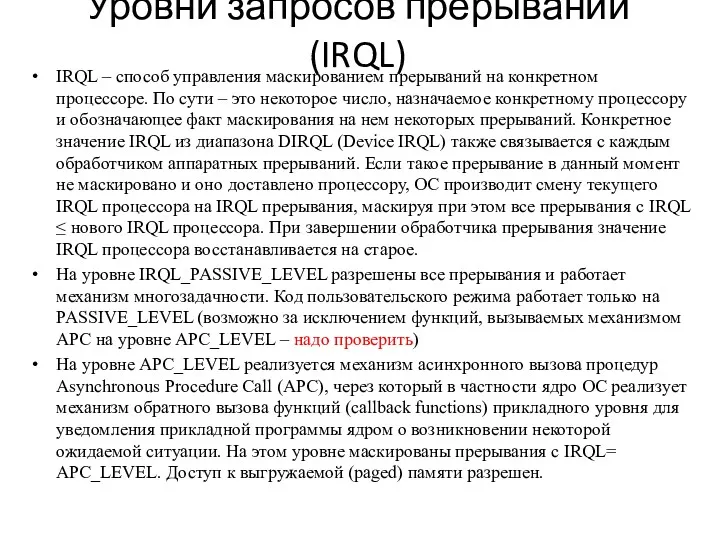
Уровни запросов прерываний (IRQL)
IRQL – способ управления маскированием прерываний на конкретном
Уровни запросов прерываний (IRQL)
IRQL – способ управления маскированием прерываний на конкретном
На уровне IRQL DISPATCH_LEVEL работают так называемые «отложенные процедуры» (Deferred Procedure
На уровне IRQL DISPATCH_LEVEL работают так называемые «отложенные процедуры» (Deferred Procedure
при работе процессора на уровне IRQL≥DISPATCH_LEVEL запрещено обращение к выгружаемой памяти
при работе процессора на уровне IRQL≥DISPATCH_LEVEL запрещено обращение к выгружаемой памяти
Код потока
ISR 1 начало
t1
PASSIVE_LEVEL
Обработка очереди DPC
ISR 2
ISR 1 продолжение
Доставка APC
Код потока
APC_LEVEL
DISPATCH_LEVEL
DIRQL
Код потока
ISR 1 начало
t1
PASSIVE_LEVEL
Обработка очереди DPC
ISR 2
ISR 1 продолжение
Доставка APC
Код потока
APC_LEVEL
DISPATCH_LEVEL
DIRQL
!!!В Win10 – появился Rank
!!!В Win10 – появился Rank
Основные структуры управления памятью ОС Windows
Cr3 -> Page Directory, Page Tables
Основные структуры управления памятью ОС Windows
Cr3 -> Page Directory, Page Tables
![FS:[0] Основные структуры управления процессами и потоками PEB *Peb TEB](/_ipx/f_webp&q_80&fit_contain&s_1440x1080/imagesDir/jpg/27950/slide-44.jpg)
FS:[0]
Основные структуры управления процессами и потоками
PEB *Peb
TEB
(Thread Environment Block)
TIB
FS:[0]
FS:[0]
CPU
PEB
(ProcessEnvironment
FS:[0]
Основные структуры управления процессами и потоками
PEB *Peb
TEB
(Thread Environment Block)
TIB
FS:[0]
FS:[0]
CPU
PEB
(ProcessEnvironment
Пространство имен диспетчера объектов
Пространство имен диспетчера объектов
Имена ядерных объектов размещаются в едином пространстве имен. Подсистема Win32 скрывает
Имена ядерных объектов размещаются в едином пространстве имен. Подсистема Win32 скрывает
«Забегая вперед»
Неразобранная часть имени, если она есть, хранится в стеке размещения
«Забегая вперед»
Неразобранная часть имени, если она есть, хранится в стеке размещения
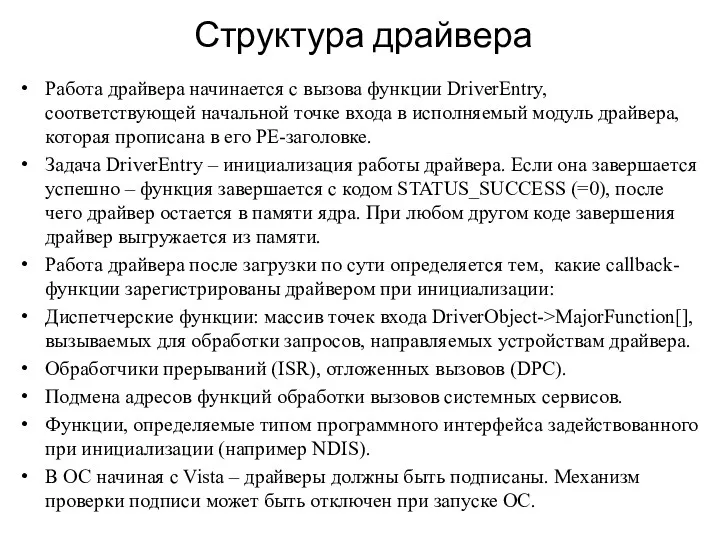
Структура драйвера
Работа драйвера начинается с вызова функции DriverEntry, соответствующей начальной точке
Структура драйвера
Работа драйвера начинается с вызова функции DriverEntry, соответствующей начальной точке
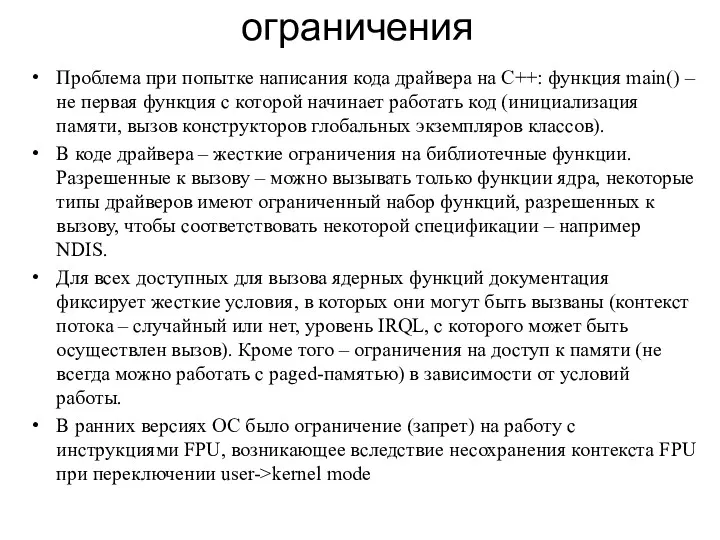
ограничения
Проблема при попытке написания кода драйвера на C++: функция main() –
ограничения
Проблема при попытке написания кода драйвера на C++: функция main() –
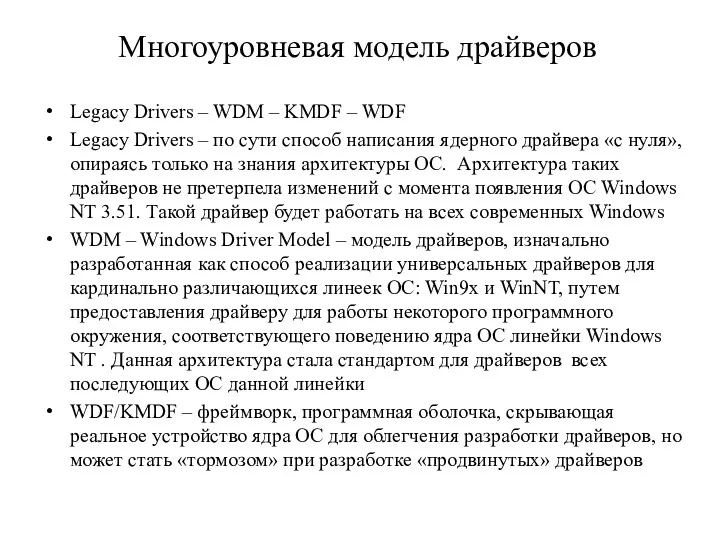
Многоуровневая модель драйверов
Legacy Drivers – WDM – KMDF – WDF
Legacy Drivers
Многоуровневая модель драйверов
Legacy Drivers – WDM – KMDF – WDF
Legacy Drivers
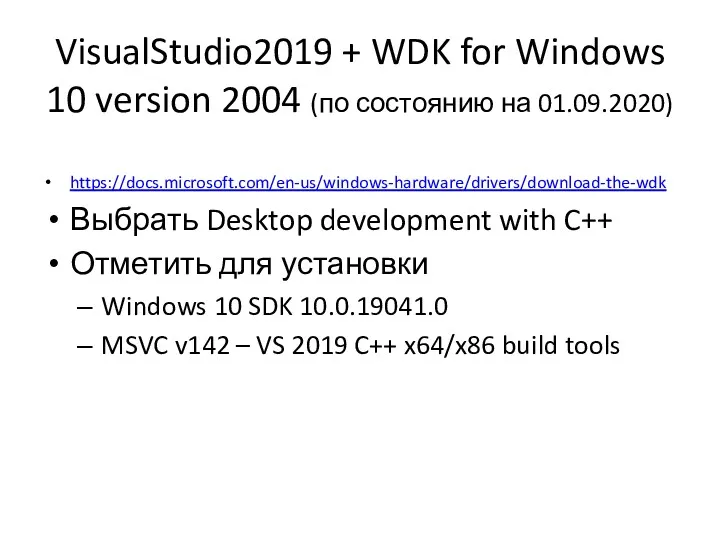
VisualStudio2019 + WDK for Windows 10 version 2004 (по состоянию на
VisualStudio2019 + WDK for Windows 10 version 2004 (по состоянию на


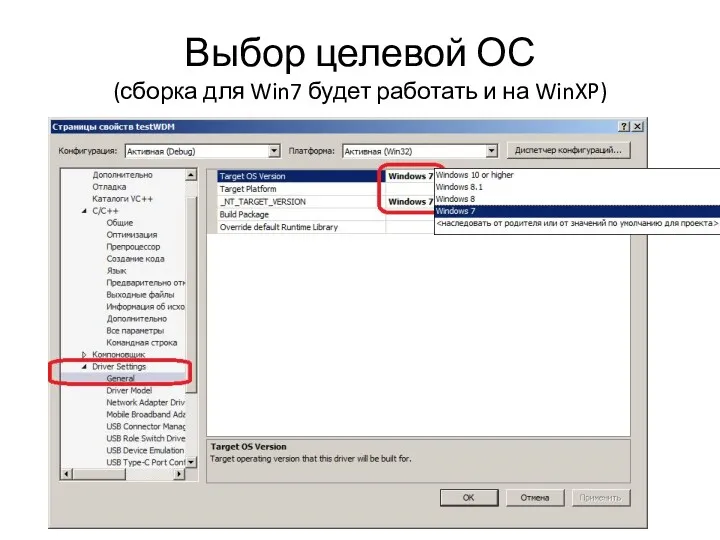
Выбор целевой ОС
(сборка для Win7 будет работать и на WinXP)
Выбор целевой ОС
(сборка для Win7 будет работать и на WinXP)
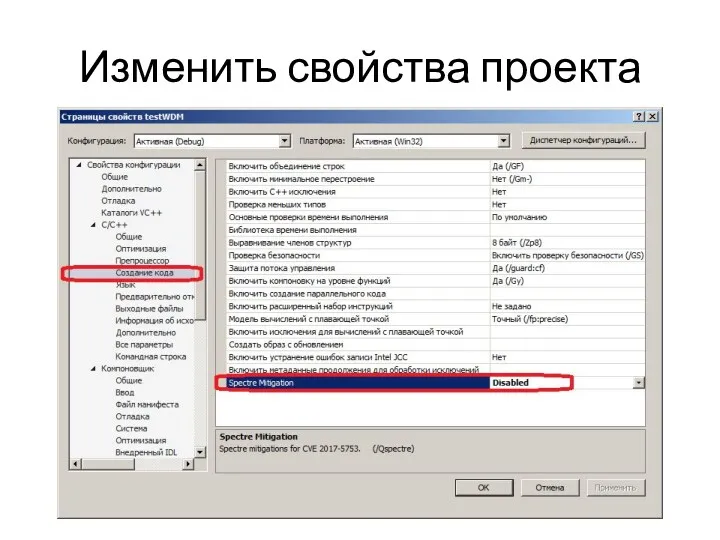
Изменить свойства проекта
Изменить свойства проекта
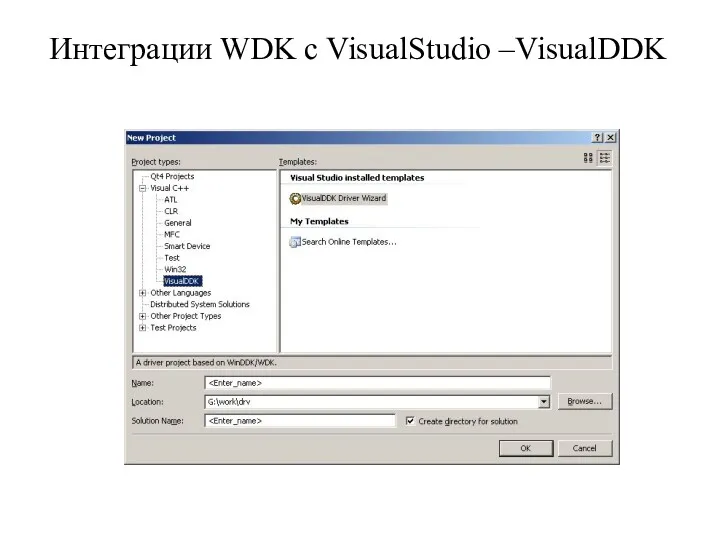
Интеграции WDK с VisualStudio –VisualDDK
Интеграции WDK с VisualStudio –VisualDDK

#ifndef _WIN32_WINNT
#define _WIN32_WINNT 0x0501
#endif
#include
NTSTATUS DriverEntry(IN PDRIVER_OBJECT DriverObject, IN PUNICODE_STRING
#ifndef _WIN32_WINNT
#define _WIN32_WINNT 0x0501
#endif
#include
NTSTATUS DriverEntry(IN PDRIVER_OBJECT DriverObject, IN PUNICODE_STRING
#ifndef _WIN32_WINNT
#define _WIN32_WINNT 0x0501
#endif
#include
void OnUnload(IN PDRIVER_OBJECT DriverObject)
{
DbgPrint("simple: OnUnload\n");
}
NTSTATUS DriverEntry(IN
#ifndef _WIN32_WINNT
#define _WIN32_WINNT 0x0501
#endif
#include
void OnUnload(IN PDRIVER_OBJECT DriverObject)
{
DbgPrint("simple: OnUnload\n");
}
NTSTATUS DriverEntry(IN
Регистрация и запуск/остановка драйвера
Внести изменения в reg-файл (в директории с проектом
Регистрация и запуск/остановка драйвера
Внести изменения в reg-файл (в директории с проектом
#ifndef _WIN32_WINNT
#define _WIN32_WINNT 0x0501
#endif
#include
void OnUnload(IN PDRIVER_OBJECT DriverObject)
{
DbgPrint("simple: OnUnload\n");
IoDeleteDevice(DriverObject->DeviceObject);
}
NTSTATUS OnCreate(IN PDEVICE_OBJECT
#ifndef _WIN32_WINNT
#define _WIN32_WINNT 0x0501
#endif
#include
void OnUnload(IN PDRIVER_OBJECT DriverObject)
{
DbgPrint("simple: OnUnload\n");
IoDeleteDevice(DriverObject->DeviceObject);
}
NTSTATUS OnCreate(IN PDEVICE_OBJECT
#ifndef _WIN32_WINNT
#define _WIN32_WINNT 0x0501
#endif
#include
void OnUnload(IN PDRIVER_OBJECT DriverObject)
{
UNICODE_STRING Win32Device;
DbgPrint("simple: OnUnload\n");
RtlInitUnicodeString(&Win32Device,L"\\DosDevices\\simple0");
IoDeleteSymbolicLink(&Win32Device);
IoDeleteDevice(DriverObject->DeviceObject);
}
NTSTATUS OnCreate(IN
#ifndef _WIN32_WINNT
#define _WIN32_WINNT 0x0501
#endif
#include
void OnUnload(IN PDRIVER_OBJECT DriverObject)
{
UNICODE_STRING Win32Device;
DbgPrint("simple: OnUnload\n");
RtlInitUnicodeString(&Win32Device,L"\\DosDevices\\simple0");
IoDeleteSymbolicLink(&Win32Device);
IoDeleteDevice(DriverObject->DeviceObject);
}
NTSTATUS OnCreate(IN

Взаимосвязь основных ядерных объектов при прохождении запроса в/в
Взаимосвязь основных ядерных объектов при прохождении запроса в/в
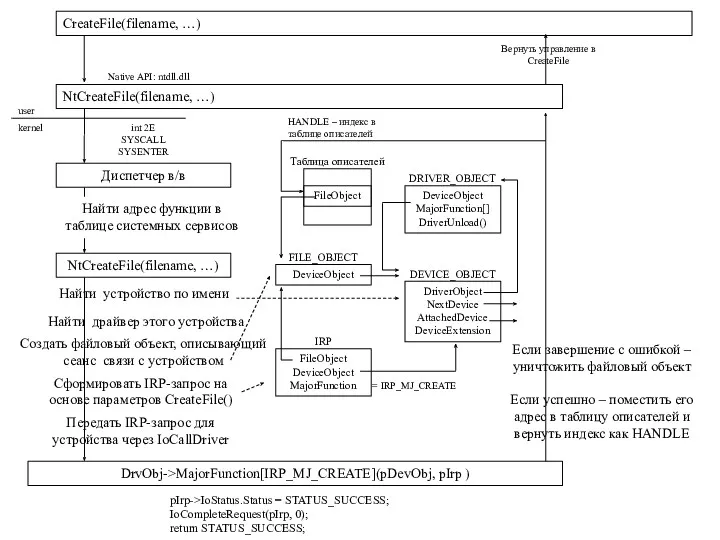
DRIVER_OBJECT
Найти устройство по имени
int 2E
SYSCALL
SYSENTER
DeviceObject
MajorFunction[]
DriverUnload()
CreateFile(filename, …)
NtCreateFile(filename, …)
Диспетчер в/в
Найти адрес функции в
DRIVER_OBJECT
Найти устройство по имени
int 2E
SYSCALL
SYSENTER
DeviceObject
MajorFunction[]
DriverUnload()
CreateFile(filename, …)
NtCreateFile(filename, …)
Диспетчер в/в
Найти адрес функции в
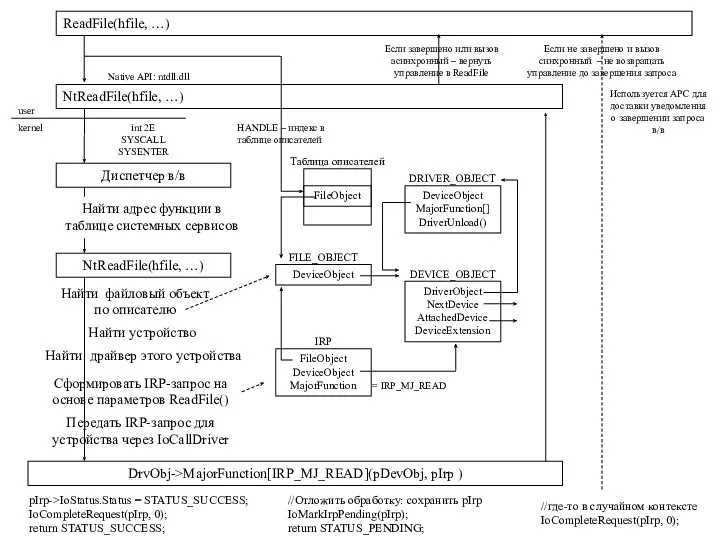
DRIVER_OBJECT
Найти файловый объект по описателю
int 2E
SYSCALL
SYSENTER
DeviceObject
MajorFunction[]
DriverUnload()
ReadFile(hfile, …)
NtReadFile(hfile, …)
Диспетчер в/в
Найти адрес функции
DRIVER_OBJECT
Найти файловый объект по описателю
int 2E
SYSCALL
SYSENTER
DeviceObject
MajorFunction[]
DriverUnload()
ReadFile(hfile, …)
NtReadFile(hfile, …)
Диспетчер в/в
Найти адрес функции
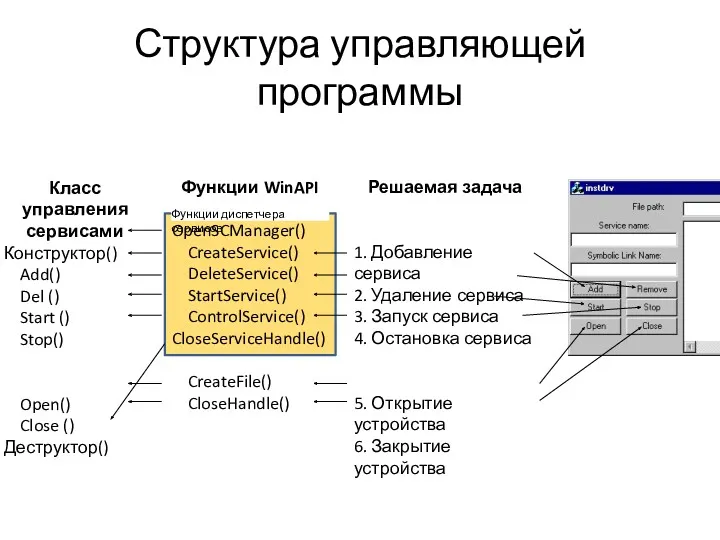
Структура управляющей программы
Функции WinAPI
OpenSCManager()
CreateService()
DeleteService()
StartService()
ControlService()
CloseServiceHandle()
CreateFile()
CloseHandle()
Решаемая задача
1.
Структура управляющей программы
Функции WinAPI
OpenSCManager()
CreateService()
DeleteService()
StartService()
ControlService()
CloseServiceHandle()
CreateFile()
CloseHandle()
Решаемая задача
1.
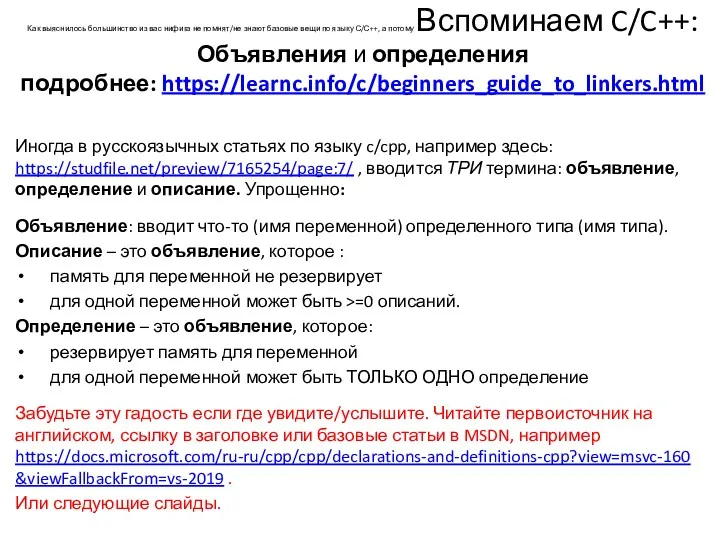
Как выяснилось большинство из вас нифига не помнят/не знают базовые вещи
Как выяснилось большинство из вас нифига не помнят/не знают базовые вещи
В английском языке для c/cpp используется ДВА термина:
declaration (объявление), описывает
В английском языке для c/cpp используется ДВА термина:
declaration (объявление), описывает
Сборка проекта (build):
препроцессинг, компиляция, компоновка(линковка)
Проект программы (project в терминологии
Сборка проекта (build):
препроцессинг, компиляция, компоновка(линковка)
Проект программы (project в терминологии
Общее правило для проекта программы, состоящего из нескольких c/cpp – файлов:
В
Общее правило для проекта программы, состоящего из нескольких c/cpp – файлов:
В
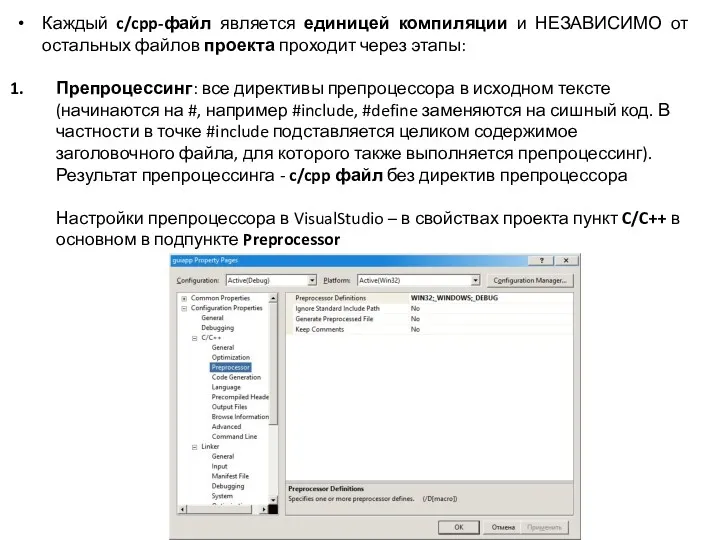
Каждый c/cpp-файл является единицей компиляции и НЕЗАВИСИМО от остальных файлов проекта
Каждый c/cpp-файл является единицей компиляции и НЕЗАВИСИМО от остальных файлов проекта
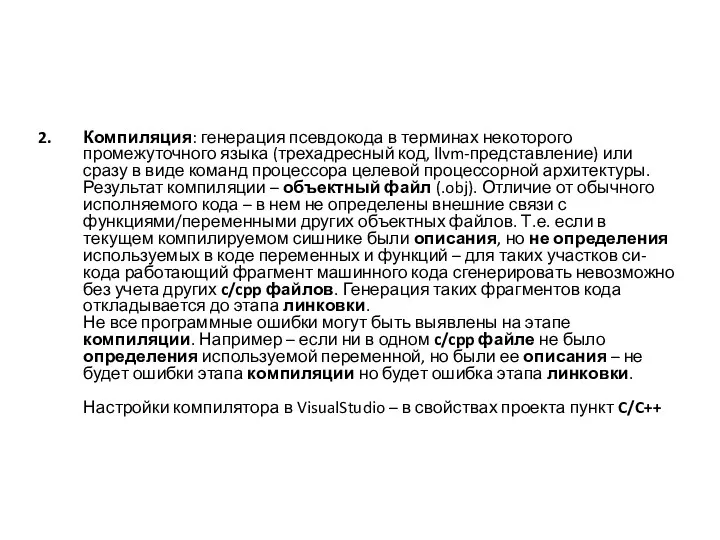
Компиляция: генерация псевдокода в терминах некоторого промежуточного языка (трехадресный код, llvm-представление)
Компиляция: генерация псевдокода в терминах некоторого промежуточного языка (трехадресный код, llvm-представление)
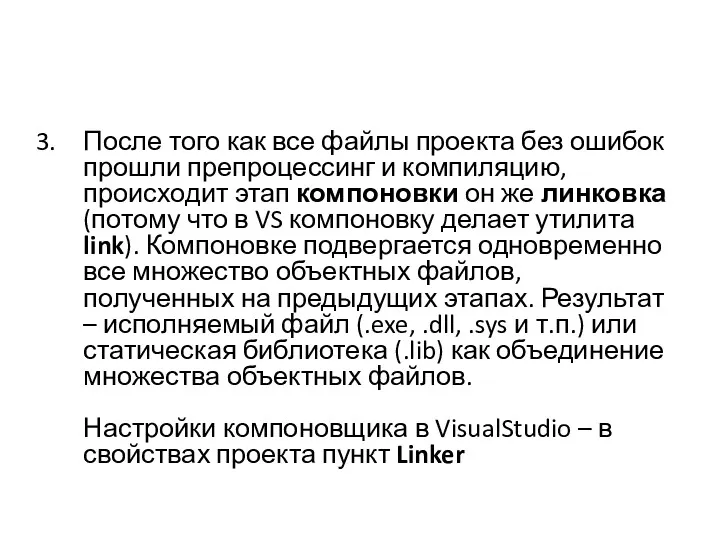
После того как все файлы проекта без ошибок прошли препроцессинг и
После того как все файлы проекта без ошибок прошли препроцессинг и
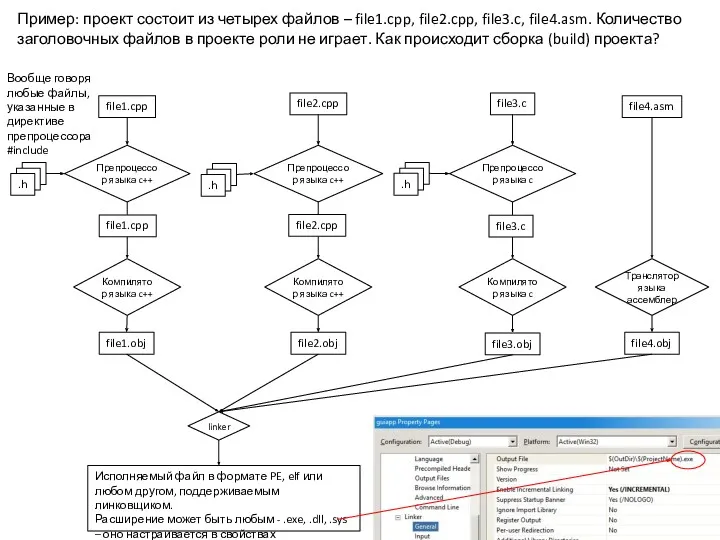
.h
.h
file1.cpp
file2.cpp
file4.asm
Компилятор языка c++
Транслятор языка ассемблер
Препроцессор языка c++
Препроцессор языка c++
.h
Вообще говоря любые
.h
.h
file1.cpp
file2.cpp
file4.asm
Компилятор языка c++
Транслятор языка ассемблер
Препроцессор языка c++
Препроцессор языка c++
.h
Вообще говоря любые
Как запустить сборку (build) проекта
Правый клик мышкой на имени проекта –
Как запустить сборку (build) проекта
Правый клик мышкой на имени проекта –
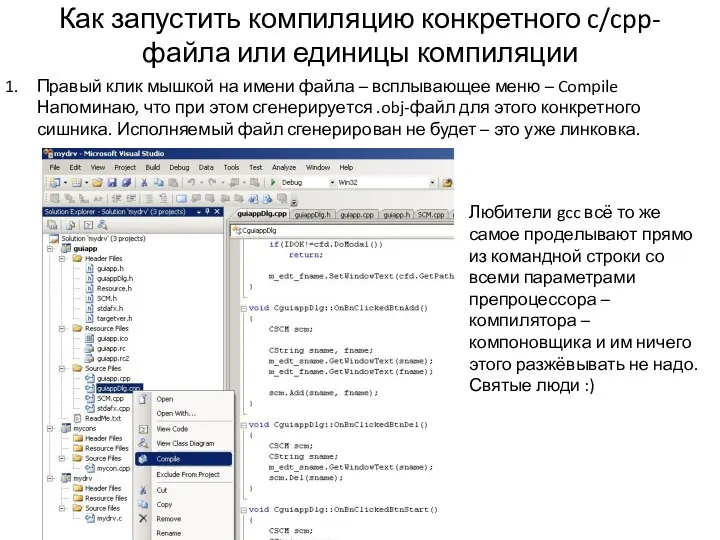
Как запустить компиляцию конкретного c/cpp-файла или единицы компиляции
Правый клик мышкой на
Как запустить компиляцию конкретного c/cpp-файла или единицы компиляции
Правый клик мышкой на


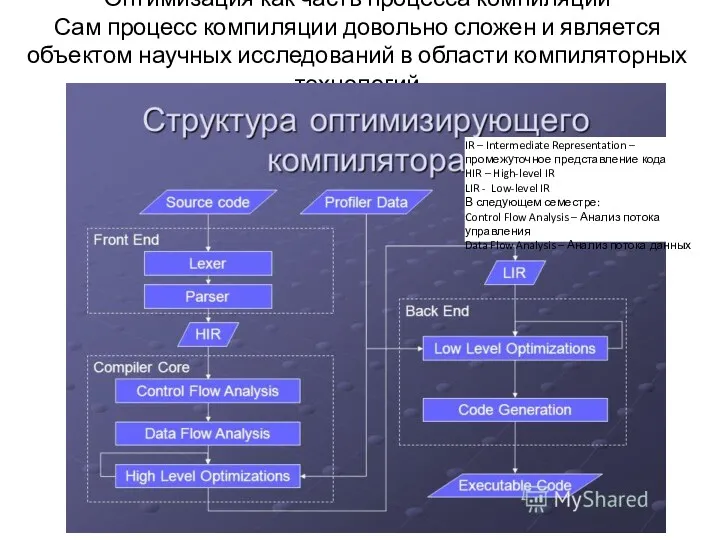
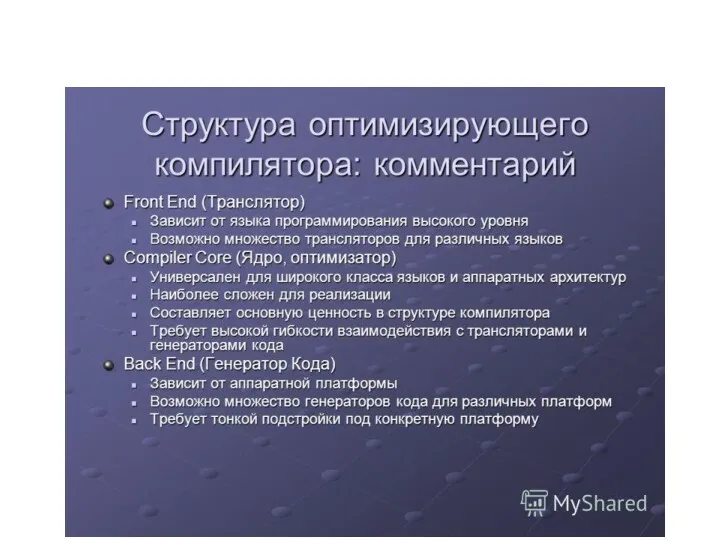
Оптимизация как часть процесса компиляции
Сам процесс компиляции довольно сложен и
Оптимизация как часть процесса компиляции Сам процесс компиляции довольно сложен и



Дополнительные ссылки
«Для чайников» про то же, но в gcc: https://habr.com/ru/post/478124/
А вот
Дополнительные ссылки
«Для чайников» про то же, но в gcc: https://habr.com/ru/post/478124/
А вот
Precompiled headers - предварительно откомпилированные заголовки
Количество строк кода в стандартных заголовочных
Precompiled headers - предварительно откомпилированные заголовки
Количество строк кода в стандартных заголовочных
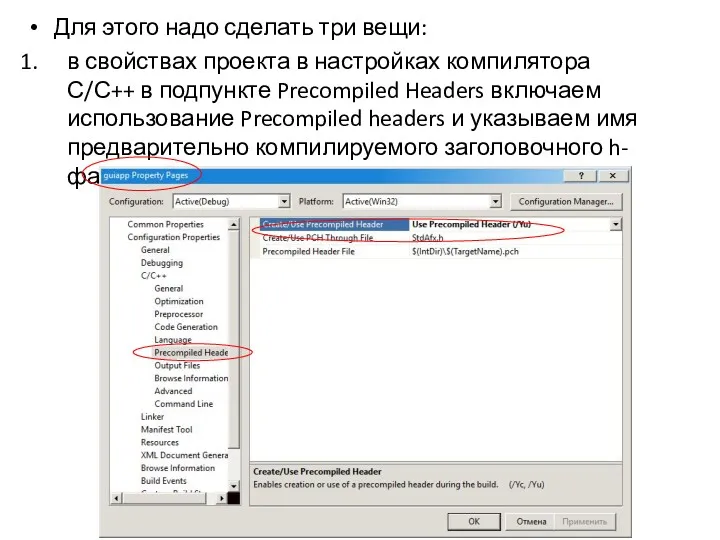
Для этого надо сделать три вещи:
в свойствах проекта в настройках
Для этого надо сделать три вещи:
в свойствах проекта в настройках
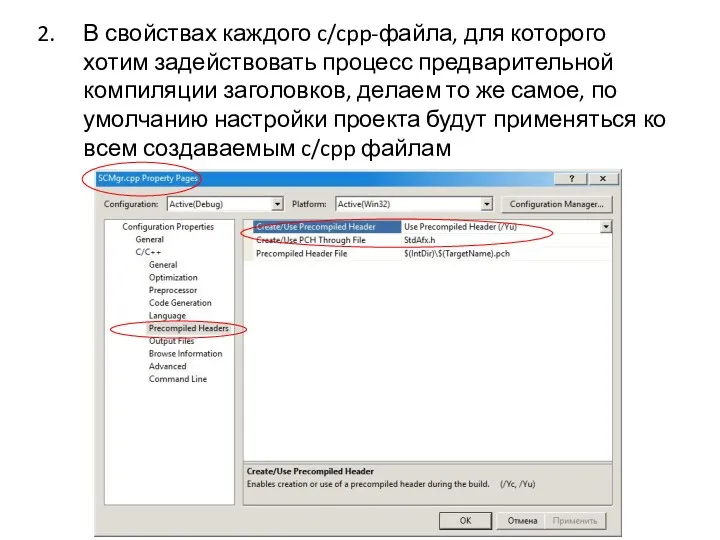
В свойствах каждого c/cpp-файла, для которого хотим задействовать процесс предварительной компиляции
В свойствах каждого c/cpp-файла, для которого хотим задействовать процесс предварительной компиляции
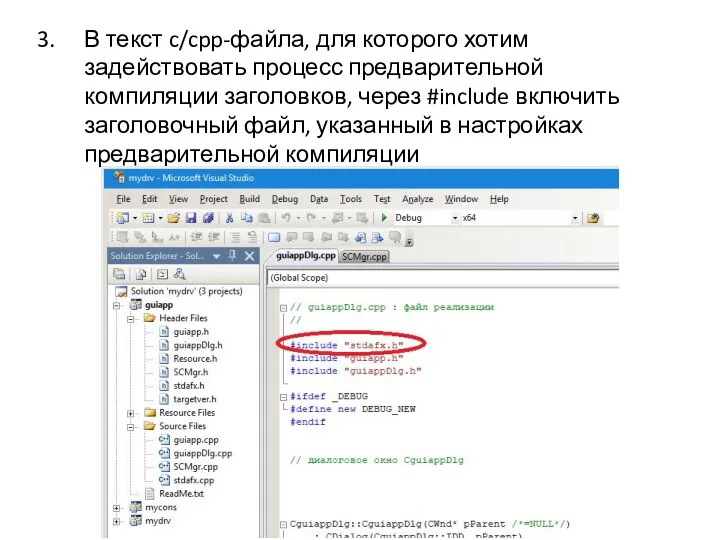
В текст c/cpp-файла, для которого хотим задействовать процесс предварительной компиляции заголовков,
В текст c/cpp-файла, для которого хотим задействовать процесс предварительной компиляции заголовков,
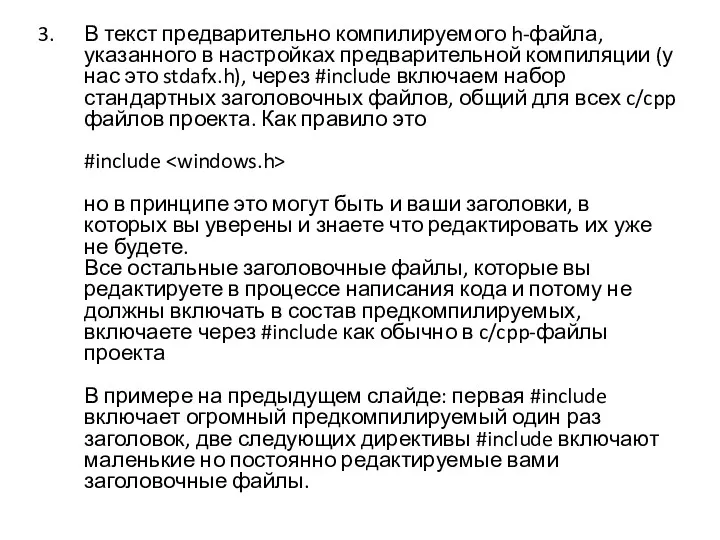
В текст предварительно компилируемого h-файла, указанного в настройках предварительной компиляции (у
В текст предварительно компилируемого h-файла, указанного в настройках предварительной компиляции (у
Теперь возвращаемся к структуре текущего проекта
на следующем слайде - упрощенная схема
Теперь возвращаемся к структуре текущего проекта
на следующем слайде - упрощенная схема
Программа с графическим интерфейсом (GUIApp)
scm.h
scm.cpp
class CguiappApp : public CWinAppEx
{
virtual BOOL
Программа с графическим интерфейсом (GUIApp)
scm.h
scm.cpp
class CguiappApp : public CWinAppEx
{
virtual BOOL
Программа с графическим интерфейсом (GUIApp)
Консольная программа(TestCons)
class CguiappApp :
public CWinAppEx
{
Программа с графическим интерфейсом (GUIApp)
Консольная программа(TestCons)
class CguiappApp :
public CWinAppEx
{
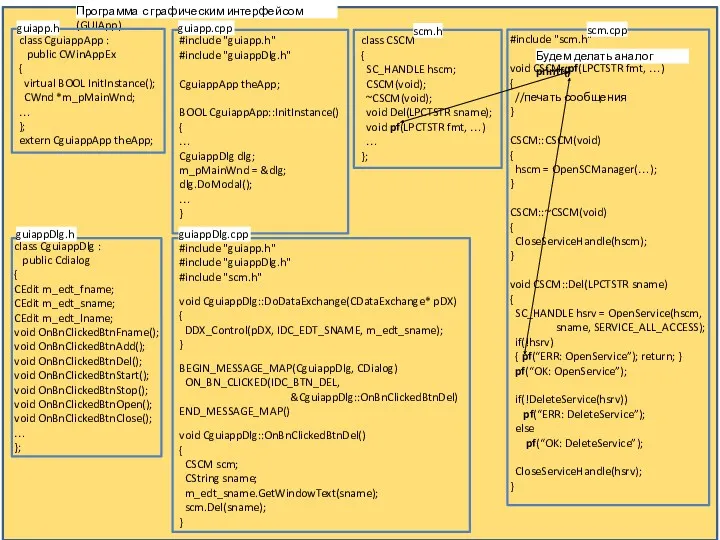
В классе CSCM хотим сделать аналог функции printf, которая печатает диагностические
В классе CSCM хотим сделать аналог функции printf, которая печатает диагностические
Программа с графическим интерфейсом (GUIApp)
Консольная программа(TestCons)
class CguiappApp :
public CWinAppEx
{
Программа с графическим интерфейсом (GUIApp)
Консольная программа(TestCons)
class CguiappApp :
public CWinAppEx
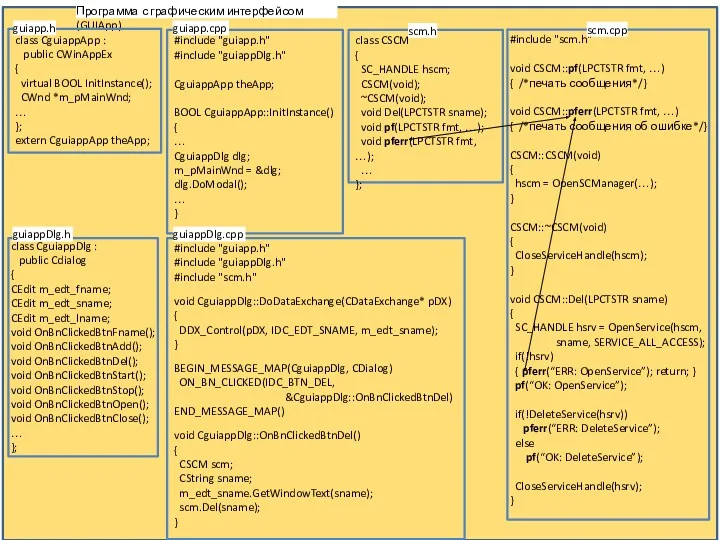
{
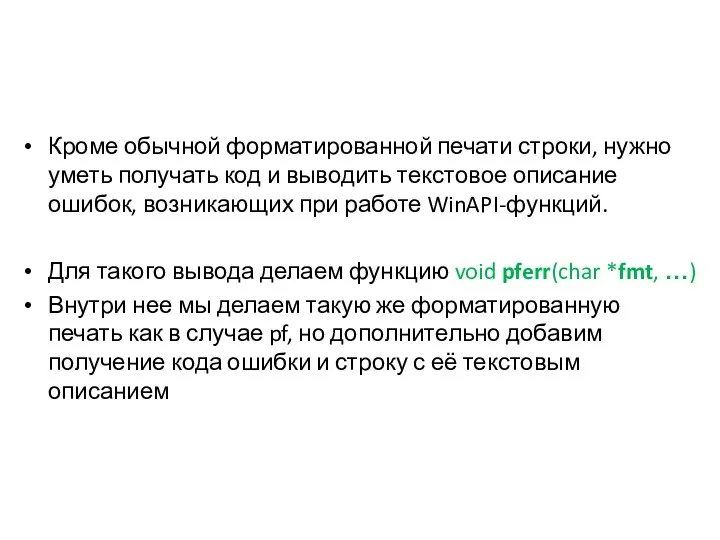
Кроме обычной форматированной печати строки, нужно уметь получать код и выводить
Кроме обычной форматированной печати строки, нужно уметь получать код и выводить
Программа с графическим интерфейсом (GUIApp)
Консольная программа(TestCons)
class CguiappApp :
public CWinAppEx
{
Программа с графическим интерфейсом (GUIApp)
Консольная программа(TestCons)
class CguiappApp :
public CWinAppEx
{
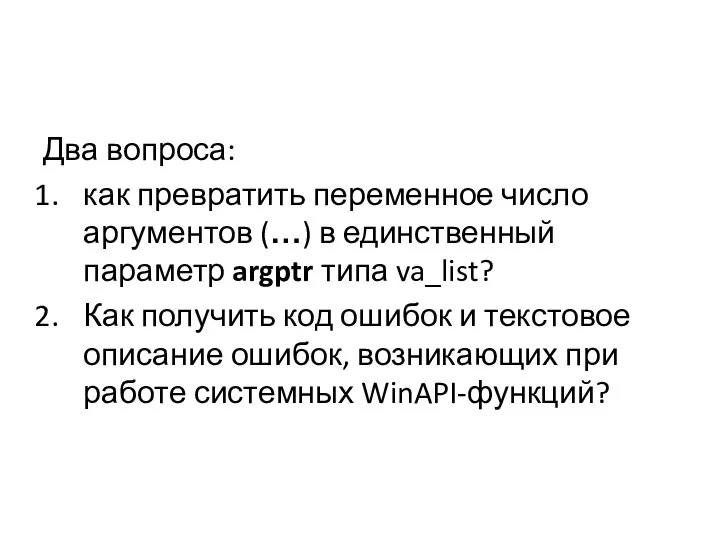
Два вопроса:
как превратить переменное число аргументов (…) в единственный параметр
Два вопроса:
как превратить переменное число аргументов (…) в единственный параметр
Как превратить переменное число аргументов (…) в единственный параметр argptr типа
Как превратить переменное число аргументов (…) в единственный параметр argptr типа
Мы хотим сделать наш класс управления сервисами CSCM быстро переносимым в
Мы хотим сделать наш класс управления сервисами CSCM быстро переносимым в
Как из функции pf() - члена класса CSCM вызывать функцию vpf()
Как из функции pf() - члена класса CSCM вызывать функцию vpf()
Программа с графическим интерфейсом (GUIApp)
Консольная программа(TestCons)
class CguiappApp :
public CWinAppEx
{
Программа с графическим интерфейсом (GUIApp)
Консольная программа(TestCons)
class CguiappApp :
public CWinAppEx
{
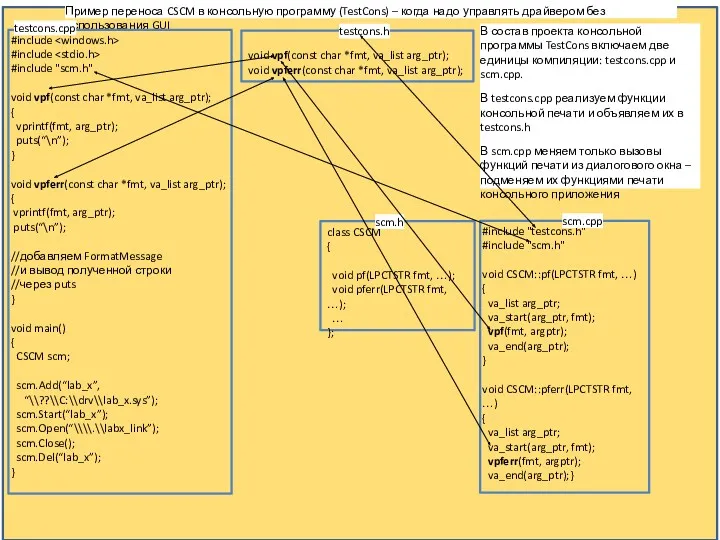
Пример переноса CSCM в консольную программу (TestCons) – когда надо управлять
Пример переноса CSCM в консольную программу (TestCons) – когда надо управлять
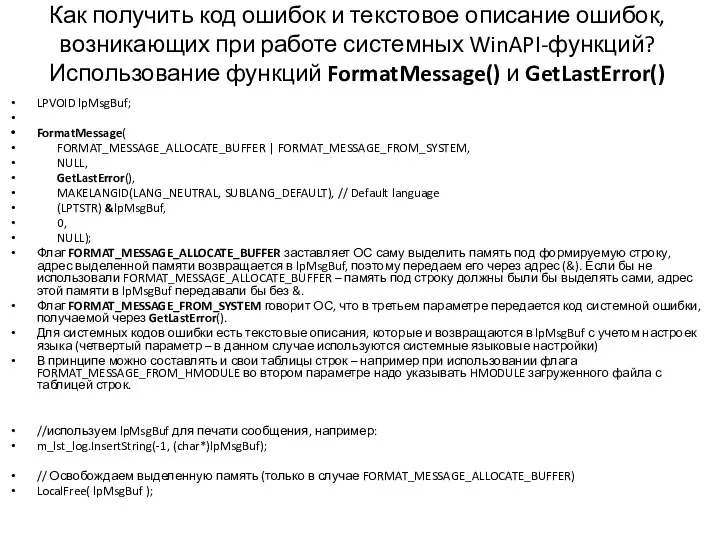
Как получить код ошибок и текстовое описание ошибок, возникающих при работе
Как получить код ошибок и текстовое описание ошибок, возникающих при работе
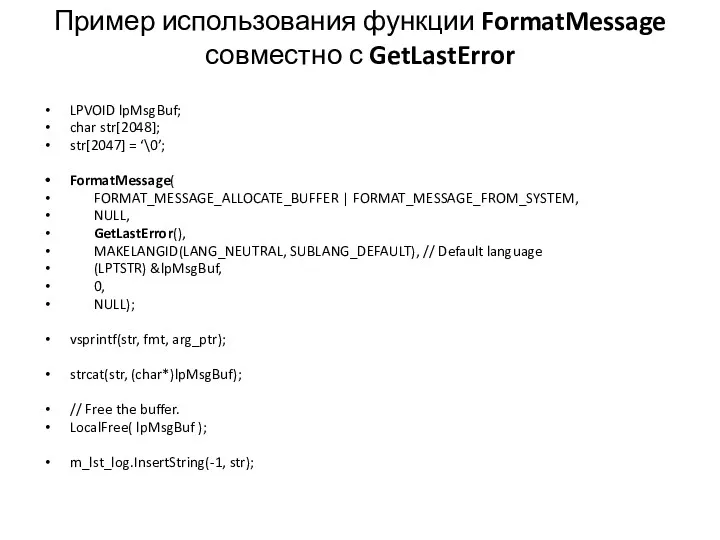
Пример использования функции FormatMessage совместно с GetLastError
LPVOID lpMsgBuf;
char str[2048];
str[2047] = ‘\0’;
FormatMessage(
Пример использования функции FormatMessage совместно с GetLastError
LPVOID lpMsgBuf;
char str[2048];
str[2047] = ‘\0’;
FormatMessage(
Примеры анализа драйвера
Использование дизассемблера IDA Pro
Использование среды анализа TREX
Примеры анализа драйвера
Использование дизассемблера IDA Pro
Использование среды анализа TREX
Отладочные возможности процессора, особенности в Windows, средства отладки
Пошаговая отладка: TraceFlag в
Отладочные возможности процессора, особенности в Windows, средства отладки
Пошаговая отладка: TraceFlag в
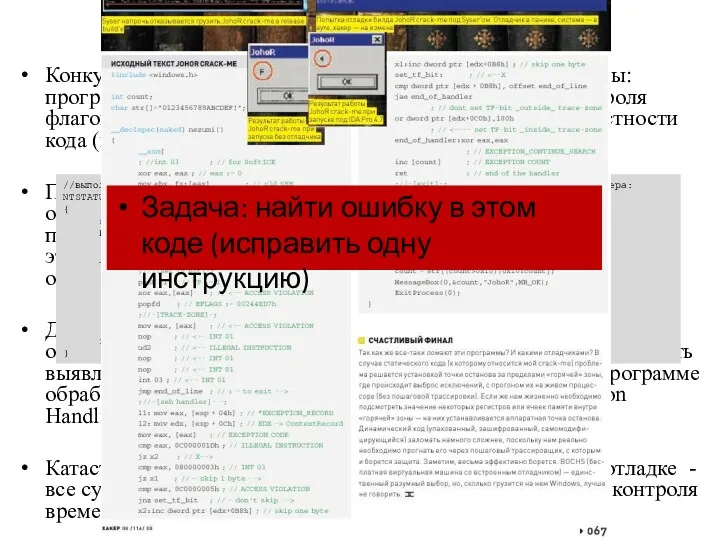
Проблемы программных отладчиков
Конкуренция с отлаживаемой программой за общие ресурсы: программные отладчики
Проблемы программных отладчиков
Конкуренция с отлаживаемой программой за общие ресурсы: программные отладчики
«Классические» отладчики уровня ОС фактически вытеснены отладочными возможностями симуляторов:
backend: VmWare
frontend: интерфейс
«Классические» отладчики уровня ОС фактически вытеснены отладочными возможностями симуляторов:
backend: VmWare
frontend: интерфейс
Взаимодействие с устройствами
ReadFile – ZwReadFile – IRP_MJ_READ
WriteFile – ZwWriteFile – IRP_MJ_WRITE
DeviceIoControl
Взаимодействие с устройствами
ReadFile – ZwReadFile – IRP_MJ_READ
WriteFile – ZwWriteFile – IRP_MJ_WRITE
DeviceIoControl
Flags
StackSize = 3
AttachedDevice
Flags
StackSize = 1
AttachedDevice
…
Пересылка запросов между устройствами - IoCallDriver()
Получение адреса
Flags
StackSize = 3
AttachedDevice
Flags
StackSize = 1
AttachedDevice
…
Пересылка запросов между устройствами - IoCallDriver()
Получение адреса
Драйвера подразделяются на 3 класса по их положению в стеке драйверов:
Драйвера подразделяются на 3 класса по их положению в стеке драйверов:
Число стеков размещения в/в устанавливается Диспетчером в/в в поле StackSize объекта-устройство.
Число стеков размещения в/в устанавливается Диспетчером в/в в поле StackSize объекта-устройство.
Код запроса в/в сохранен в поле MajorFunction (есть еще второстепенный код
Код запроса в/в сохранен в поле MajorFunction (есть еще второстепенный код
BOOL WINAPI ReadFile(
__in HANDLE hFile,
__out LPVOID lpBuffer,
BOOL WINAPI ReadFile(
__in HANDLE hFile,
__out LPVOID lpBuffer,
BOOL WINAPI WriteFile(
__in HANDLE hFile,
__in LPCVOID lpBuffer,
BOOL WINAPI WriteFile(
__in HANDLE hFile,
__in LPCVOID lpBuffer,
По адресу lpNumberOfBytesRead/ lpNumberOfBytesWritten в результате успешного завершения функции помещается содержимое
По адресу lpNumberOfBytesRead/ lpNumberOfBytesWritten в результате успешного завершения функции помещается содержимое
Метод передачи буфера, используемый в запросах чтения и записи, контролируется полем
Метод передачи буфера, используемый в запросах чтения и записи, контролируется полем
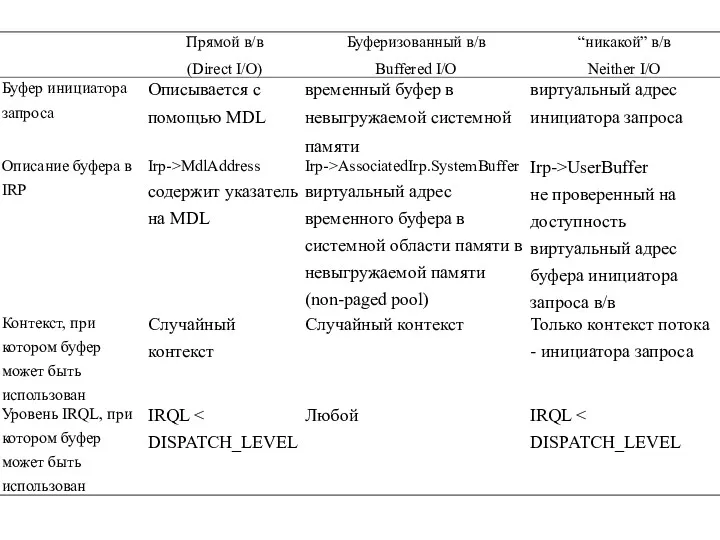
Размер буфера для операций чтения/записи расположен в стеке размещения в/в:
Stack->Parameters.Read.Length
Stack->Parameters.Write.Length
С точки
Размер буфера для операций чтения/записи расположен в стеке размещения в/в:
Stack->Parameters.Read.Length
Stack->Parameters.Write.Length
С точки
Neither I/O
buf_1
user
kernel
virtual address
Адр. простр.1
Адр. простр.2
buf_2
физ. память
чтение/запись
Neither I/O
buf_1
user
kernel
virtual address
Адр. простр.1
Адр. простр.2
buf_2
физ. память
чтение/запись
Direct I/O
buf_1
user
kernel
virtual address
Адр. простр.1
Адр. простр.2
buf_2
физ. память
buf_3
MDL
MmGetSystemAddressForMdl()
чтение/запись
MDL – структура, описывающая буфер с
Direct I/O
buf_1
user
kernel
virtual address
Адр. простр.1
Адр. простр.2
buf_2
физ. память
buf_3
MDL
MmGetSystemAddressForMdl()
чтение/запись
MDL – структура, описывающая буфер с
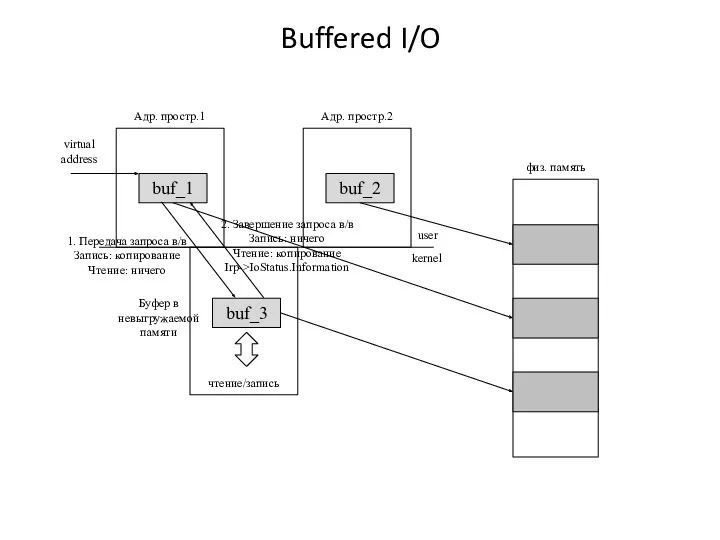
Buffered I/O
buf_1
user
kernel
virtual address
Адр. простр.1
Адр. простр.2
buf_2
физ. память
buf_3
Буфер в невыгружаемой памяти
чтение/запись
Buffered I/O
buf_1
user
kernel
virtual address
Адр. простр.1
Адр. простр.2
buf_2
физ. память
buf_3
Буфер в невыгружаемой памяти
чтение/запись
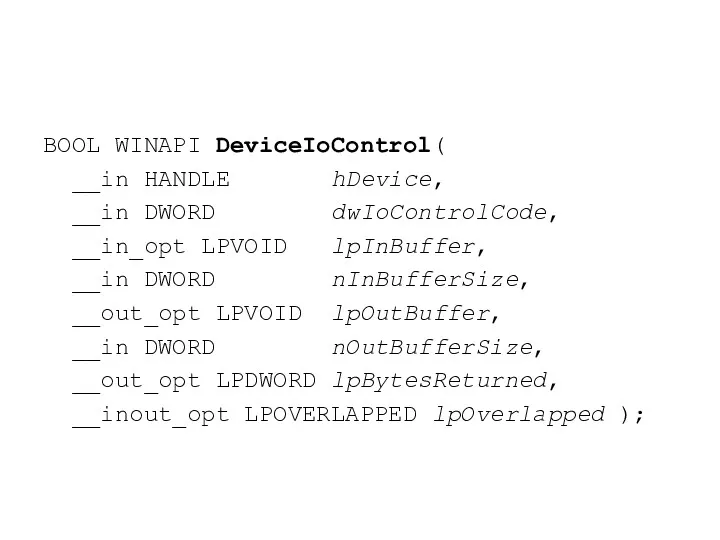
BOOL WINAPI DeviceIoControl(
__in HANDLE hDevice,
__in DWORD dwIoControlCode,
BOOL WINAPI DeviceIoControl(
__in HANDLE hDevice,
__in DWORD dwIoControlCode,
По адресу lpBytesReturned в результате успешного завершения функции помещается содержимое поля
По адресу lpBytesReturned в результате успешного завершения функции помещается содержимое поля
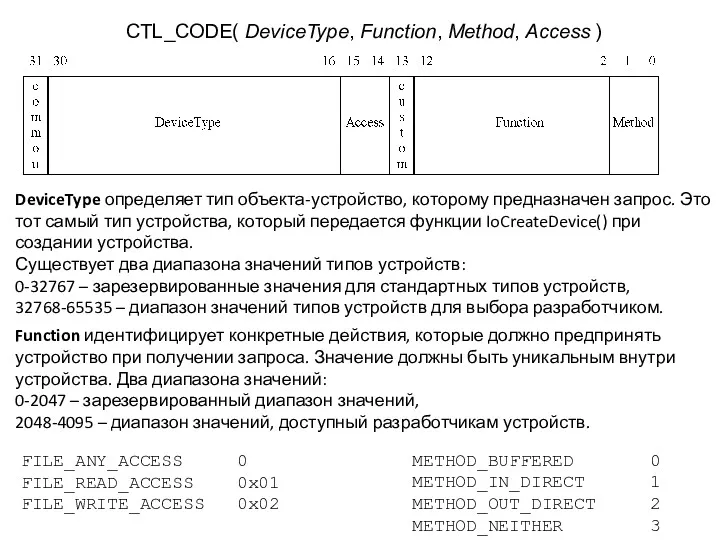
CTL_CODE( DeviceType, Function, Method, Access )
DeviceType определяет тип объекта-устройство, которому предназначен
CTL_CODE( DeviceType, Function, Method, Access )
DeviceType определяет тип объекта-устройство, которому предназначен

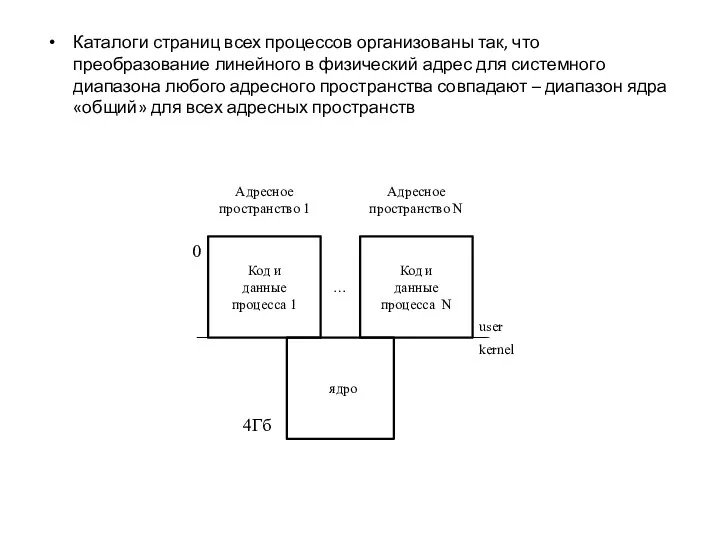
![METHOD_BUFFERED InBuf[InBufferSize ] OutBuf[OutBufferSize ] Промежуточный буфер [max(InBufferSize, OutBufferSize)] Irp->AssociatedIrp.SystemBuffer](/_ipx/f_webp&q_80&fit_contain&s_1440x1080/imagesDir/jpg/27950/slide-142.jpg)
METHOD_BUFFERED
InBuf[InBufferSize ]
OutBuf[OutBufferSize ]
Промежуточный буфер
[max(InBufferSize, OutBufferSize)]
Irp->AssociatedIrp.SystemBuffer
1. Перед вызовом IRP_MJ_DEVICE_CONTROL копируется InBufferSize байт
2.
METHOD_BUFFERED
InBuf[InBufferSize ]
OutBuf[OutBufferSize ]
Промежуточный буфер
[max(InBufferSize, OutBufferSize)]
Irp->AssociatedIrp.SystemBuffer
1. Перед вызовом IRP_MJ_DEVICE_CONTROL копируется InBufferSize байт
2.
Механизмы синхронизации
Спин-блокировки – для межпроцессорной синхронизации, синхронизации на уровне IRQL=DISPATCH_LEVEL (обычные
Механизмы синхронизации
Спин-блокировки – для межпроцессорной синхронизации, синхронизации на уровне IRQL=DISPATCH_LEVEL (обычные
GUI_App
HANDLE hFile=CreateFile(“\\.\SymLinkName”, …)
FILE_OBJECT
DeviceObject
DEVICE_OBJECT
GuiDev
DriverObject
NextDevice
DeviceExtension
DeviceObject
MajorFunction[]
DRIVER_OBJECT
(FilterDriver)
DEVICE_OBJECT
TargetDev
DriverObject
NextDevice
AttachedDevice
DeviceExtension
DeviceObject
MajorFunction[]
DRIVER_OBJECT
(TargetDriver)
DEVICE_OBJECT
AttachedDev1
DriverObject
NextDevice
AttachedDevice
DeviceExtension
…
DEVICE_OBJECT
FilterDev
DriverObject
NextDevice
AttachedDevice
DeviceExtension
GUI_App
HANDLE hFile=CreateFile(“\\.\SymLinkName”, …)
FILE_OBJECT
DeviceObject
DEVICE_OBJECT
GuiDev
DriverObject
NextDevice
DeviceExtension
DeviceObject
MajorFunction[]
DRIVER_OBJECT
(FilterDriver)
DEVICE_OBJECT
TargetDev
DriverObject
NextDevice
AttachedDevice
DeviceExtension
DeviceObject
MajorFunction[]
DRIVER_OBJECT
(TargetDriver)
DEVICE_OBJECT
AttachedDev1
DriverObject
NextDevice
AttachedDevice
DeviceExtension
…
DEVICE_OBJECT
FilterDev
DriverObject
NextDevice
AttachedDevice
DeviceExtension
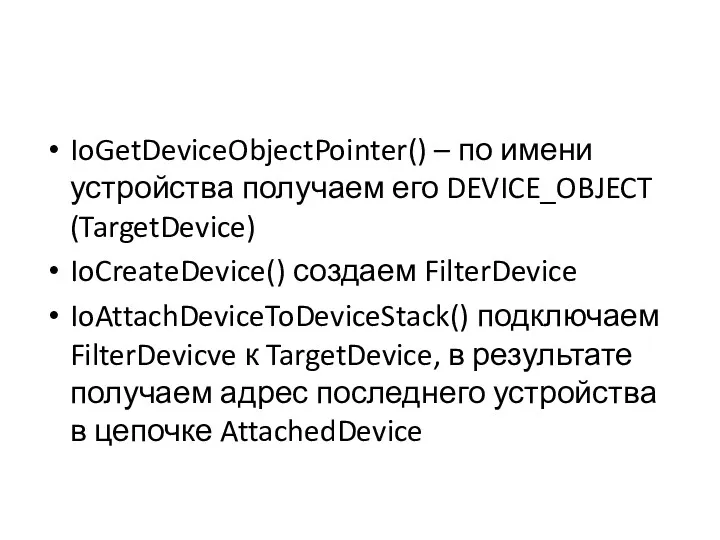
IoGetDeviceObjectPointer() – по имени устройства получаем его DEVICE_OBJECT (TargetDevice)
IoCreateDevice() создаем FilterDevice
IoAttachDeviceToDeviceStack()
IoGetDeviceObjectPointer() – по имени устройства получаем его DEVICE_OBJECT (TargetDevice)
IoCreateDevice() создаем FilterDevice
IoAttachDeviceToDeviceStack()
Спин-блокировки (spin-lock)
Спинлоки служат для обеспечения монопольного доступа потока к защищаемой структуре
Спин-блокировки (spin-lock)
Спинлоки служат для обеспечения монопольного доступа потока к защищаемой структуре
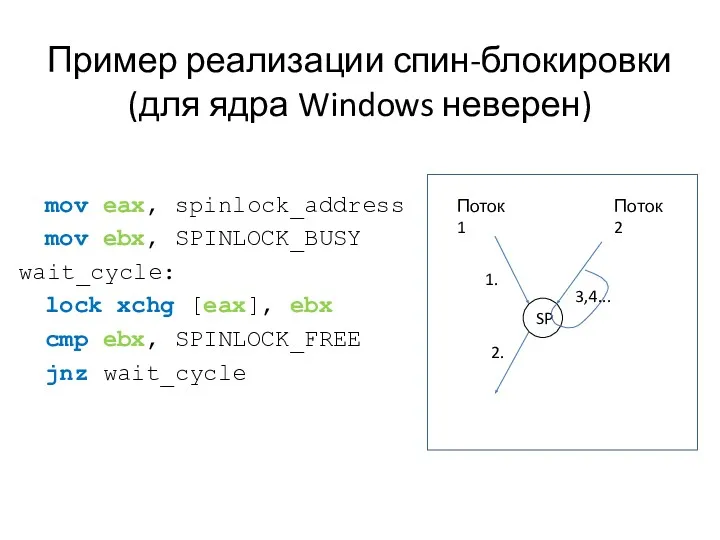
Пример реализации спин-блокировки (для ядра Windows неверен)
mov eax, spinlock_address
mov ebx,
Пример реализации спин-блокировки (для ядра Windows неверен)
mov eax, spinlock_address
mov ebx,
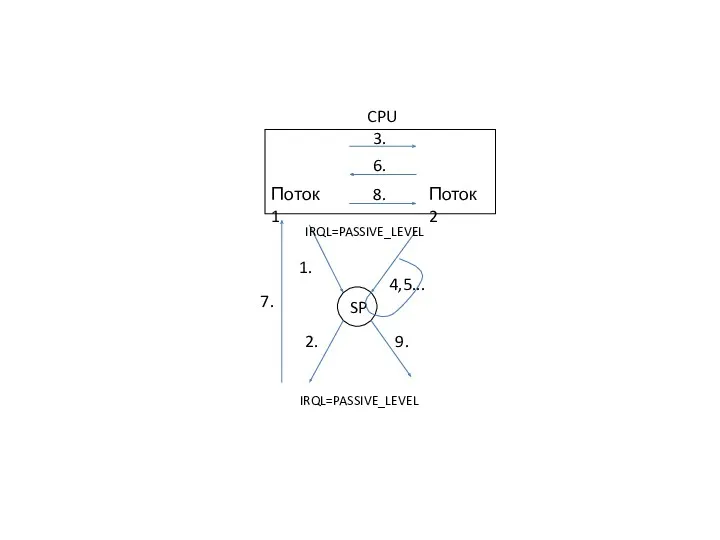
Поток 1
Поток 2
SP
1.
2.
4,5...
CPU
3.
IRQL=PASSIVE_LEVEL
IRQL=PASSIVE_LEVEL
6.
7.
9.
8.
Поток 1
Поток 2
SP
1.
2.
4,5...
CPU
3.
IRQL=PASSIVE_LEVEL
IRQL=PASSIVE_LEVEL
6.
7.
9.
8.
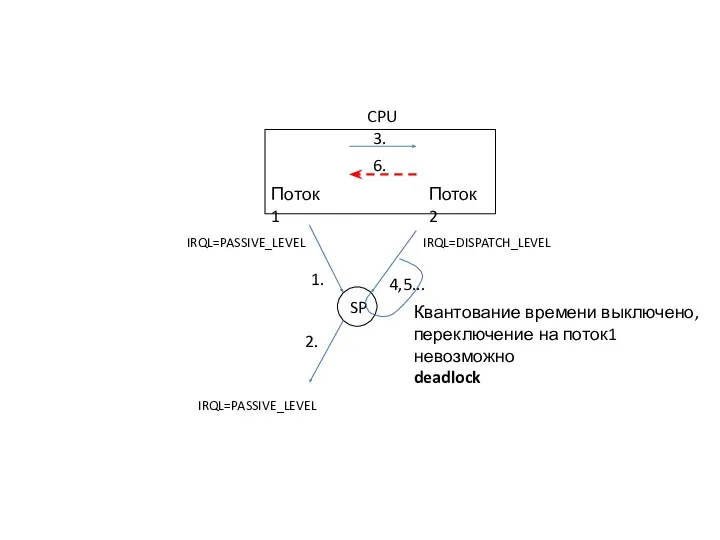
Поток 1
Поток 2
SP
Квантование времени выключено,
переключение на поток1 невозможно
deadlock
2.
4,5...
CPU
3.
IRQL=PASSIVE_LEVEL
IRQL=PASSIVE_LEVEL
6.
IRQL=DISPATCH_LEVEL
1.
Поток 1
Поток 2
SP
Квантование времени выключено,
переключение на поток1 невозможно
deadlock
2.
4,5...
CPU
3.
IRQL=PASSIVE_LEVEL
IRQL=PASSIVE_LEVEL
6.
IRQL=DISPATCH_LEVEL
1.
Поток 1
Поток 2
SP
1.
2.
3,4...
CPU1
IRQL=PASSIVE_LEVEL
IRQL=DISPATCH_LEVEL
5.
6.
IRQL=DISPATCH_LEVEL
Поток 1
Поток 2
SP
1.
2.
5
CPU
4.
IRQL=PASSIVE_LEVEL
IRQL=DISPATCH_LEVEL
3.
6.
IRQL=DISPATCH_LEVEL
CPU2
Правильная реализация спин-блокировок в ядре Windows:
в
Поток 1
Поток 2
SP
1.
2.
3,4...
CPU1
IRQL=PASSIVE_LEVEL
IRQL=DISPATCH_LEVEL
5.
6.
IRQL=DISPATCH_LEVEL
Поток 1
Поток 2
SP
1.
2.
5
CPU
4.
IRQL=PASSIVE_LEVEL
IRQL=DISPATCH_LEVEL
3.
6.
IRQL=DISPATCH_LEVEL
CPU2
Правильная реализация спин-блокировок в ядре Windows:
в
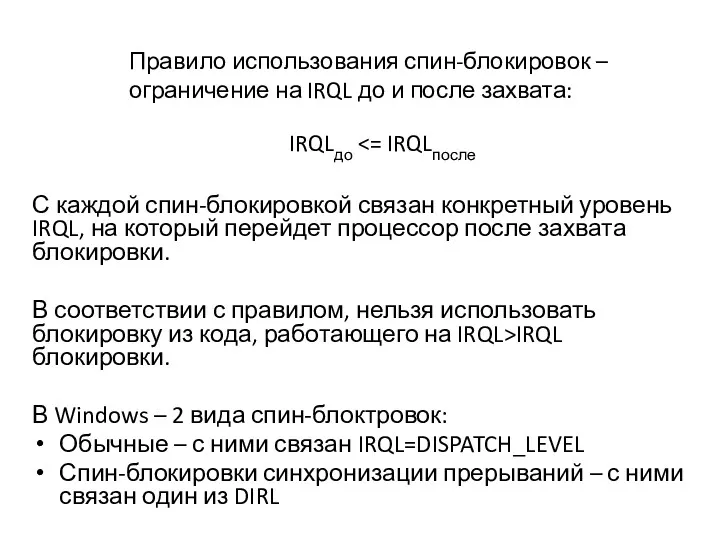
С каждой спин-блокировкой связан конкретный уровень IRQL, на который перейдет процессор
С каждой спин-блокировкой связан конкретный уровень IRQL, на который перейдет процессор
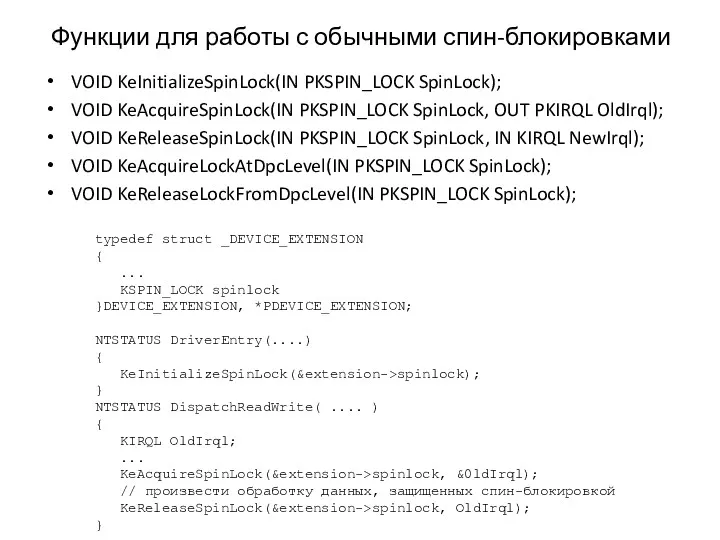
Функции для работы с обычными спин-блокировками
VOID KeInitializeSpinLock(IN PKSPIN_LOCK SpinLock);
VOID KeAcquireSpinLock(IN PKSPIN_LOCK
Функции для работы с обычными спин-блокировками
VOID KeInitializeSpinLock(IN PKSPIN_LOCK SpinLock);
VOID KeAcquireSpinLock(IN PKSPIN_LOCK
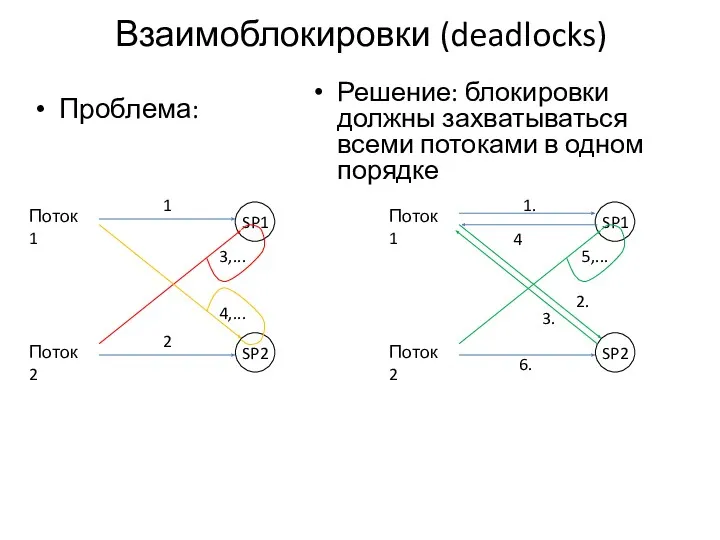
Взаимоблокировки (deadlocks)
Решение: блокировки должны захватываться всеми потоками в одном порядке
Поток 1
Поток
Взаимоблокировки (deadlocks)
Решение: блокировки должны захватываться всеми потоками в одном порядке
Поток 1
Поток
Диспетчерские объекты
Dispatcher Objects
набор механизмов синхронизации, рассчитанных на применение в основном для
Диспетчерские объекты
Dispatcher Objects
набор механизмов синхронизации, рассчитанных на применение в основном для
Блокирование потока – состояние потока, при котором он не занимает время
Блокирование потока – состояние потока, при котором он не занимает время
Диспетчерские объекты могут иметь имена в пространстве имен диспетчера объектов (обычно
Диспетчерские объекты могут иметь имена в пространстве имен диспетчера объектов (обычно
Ожидание (захват) диспетчерских объектов
Для ожидания момента перехода объекта из несигнального в
Ожидание (захват) диспетчерских объектов
Для ожидания момента перехода объекта из несигнального в
Мьютексы ядра
Мьютекс (mutex = Mutually EXclusive) означает взаимоисключение, т.е. мьютекс обеспечивает
Мьютексы ядра
Мьютекс (mutex = Mutually EXclusive) означает взаимоисключение, т.е. мьютекс обеспечивает
VOID KeInitializeMutex(IN PKMUTEX Mutex, IN ULONG Level);
LONG KeReleaseMutex(IN PKMUTEX Mutex, IN
VOID KeInitializeMutex(IN PKMUTEX Mutex, IN ULONG Level);
LONG KeReleaseMutex(IN PKMUTEX Mutex, IN
семафор
более гибкая форма мьютексов. В отличие от мьютексов, программа имеет контроль
семафор
более гибкая форма мьютексов. В отличие от мьютексов, программа имеет контроль
LONG KeReleaseSemaphore(
_Inout_ PRKSEMAPHORE Semaphore,
_In_ KPRIORITY Increment,
_In_ LONG Adjustment,
LONG KeReleaseSemaphore(
_Inout_ PRKSEMAPHORE Semaphore,
_In_ KPRIORITY Increment,
_In_ LONG Adjustment,
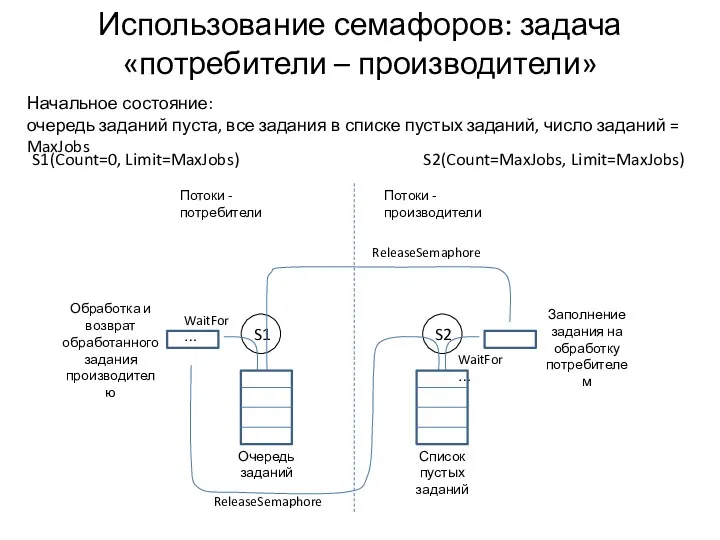
Использование семафоров: задача «потребители – производители»
WaitFor…
Потоки - производители
S2
S1
WaitFor…
ReleaseSemaphore
ReleaseSemaphore
Потоки - потребители
Заполнение задания
Использование семафоров: задача «потребители – производители»
WaitFor…
Потоки - производители
S2
S1
WaitFor…
ReleaseSemaphore
ReleaseSemaphore
Потоки - потребители
Заполнение задания
События (events)
Позволяют проводить синхронизацию исполнения различных потоков, т.е. один или несколько
События (events)
Позволяют проводить синхронизацию исполнения различных потоков, т.е. один или несколько
 Ливень. Азбука рисования
Ливень. Азбука рисования Гармония любви
Гармония любви Теоретическая грамматика английского языка. Артикль
Теоретическая грамматика английского языка. Артикль Классный час Толерантность – путь к миру.
Классный час Толерантность – путь к миру. Межотраслевые комплексы. Чёрная и цветная металлургия России
Межотраслевые комплексы. Чёрная и цветная металлургия России Бизнес. Как управлять своим доходом. Сибирское здоровье
Бизнес. Как управлять своим доходом. Сибирское здоровье Тема урока: Коробка
Тема урока: Коробка Повышение эффективности разработки залежи нефти в отложениях бобриковского объекта Троельжанского месторождения
Повышение эффективности разработки залежи нефти в отложениях бобриковского объекта Троельжанского месторождения Нептун - восьмая планета от Солнца
Нептун - восьмая планета от Солнца Алгоритмические структуры языка Basic
Алгоритмические структуры языка Basic Нормы устройства стрелочных переводов и глухих пересечений
Нормы устройства стрелочных переводов и глухих пересечений Киберспорт в России и СНГ: история, текущее состояние и перспективы
Киберспорт в России и СНГ: история, текущее состояние и перспективы Новые пространственные концепции (продолжение). Тема 2
Новые пространственные концепции (продолжение). Тема 2 Презентация практической работы по химии 8 класс Очистка поваренной соли
Презентация практической работы по химии 8 класс Очистка поваренной соли Самарская область прошлое и настоящее. Народы Самарской губернии
Самарская область прошлое и настоящее. Народы Самарской губернии Клиническое проявление и диагностика инфекционных заболеваний слизистой ротовой полости
Клиническое проявление и диагностика инфекционных заболеваний слизистой ротовой полости Реализация в Кировской области проекта Народный бюджет
Реализация в Кировской области проекта Народный бюджет Яндекс Директ. Как получать клиентов, а не клики 2.0
Яндекс Директ. Как получать клиентов, а не клики 2.0 Суперкомпьютеры
Суперкомпьютеры База поддержки морских операций. Схема организации территории ТОО Батыс Мунай Транс
База поддержки морских операций. Схема организации территории ТОО Батыс Мунай Транс Асновы кіравання інтэлектуальнай уласнасцю
Асновы кіравання інтэлектуальнай уласнасцю Курить - здоровью вредить
Курить - здоровью вредить О беспозвоночных животных Калужской области
О беспозвоночных животных Калужской области Europejski Bank Centralny
Europejski Bank Centralny Специальная теория относительности. Относительность одновременности. Постулаты Эйнштейна
Специальная теория относительности. Относительность одновременности. Постулаты Эйнштейна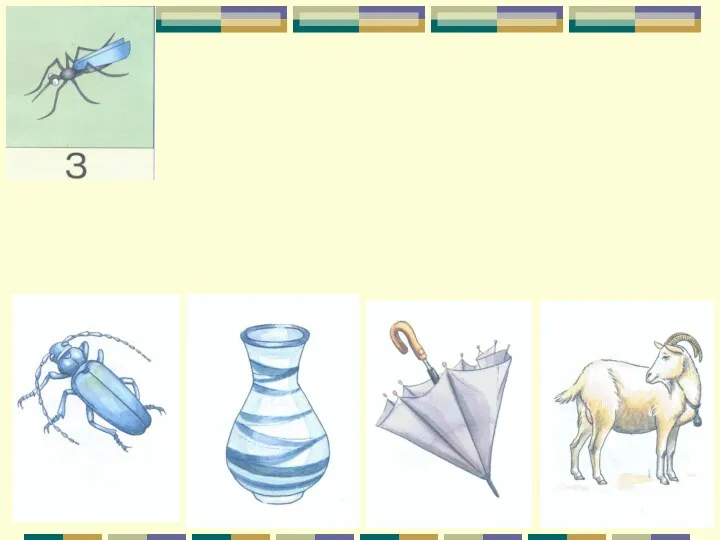 дифференциация з -ж Диск
дифференциация з -ж Диск Робот пылесос VR5901LVM
Робот пылесос VR5901LVM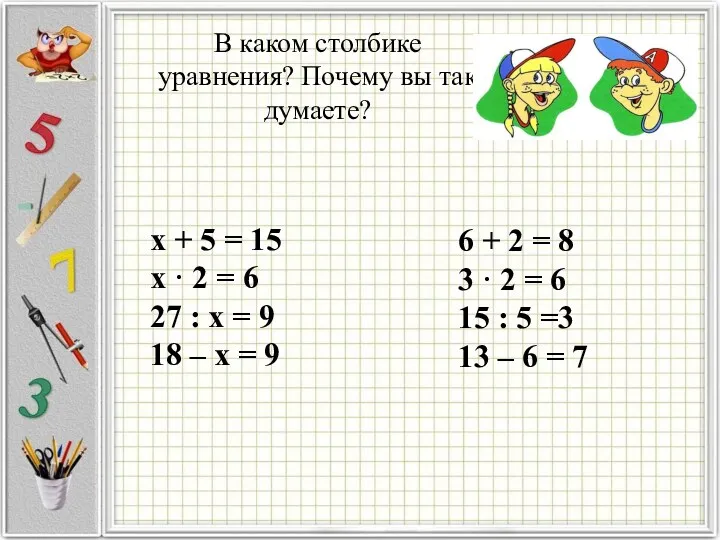 Неизвестный множитель - копия
Неизвестный множитель - копия