- Динамика. Законы Ньютона

Содержание
- 2. Динамика. Первый закон Ньютона. Динамика изучает связь между взаимодействием тел и изменениями в их движении. В
- 3. Сила. Силой называется физическая величина, являющаяся мерой механического воздействия на рассматриваемое тело со стороны других тел.
- 4. Масса. Второй закон Ньютона. Тела обладают свойством инертности, т.е. под действием силы тела постепенно изменяют свою
- 5. Третий закон Ньютона. Центр масс. Действие двух тел друг на друга всегда равны и направлены по
- 6. Закон всемирного тяготения. Между всякими двумя материальными точками действует сила всемирного тяготения, прямо пропорциональная произведению масс
- 7. Сила тяжести. Вес. Сила тяжести – это сила притяжения, действующая со стороны Земли на все тела
- 8. Сила трения. При движении по горизонтальной поверхности сила трения пропорциональна силе упругости (реакции опоры) N F
- 9. Сила упругости. При деформации внутри тела возникает сила упругости, величина которой пропорциональна деформации х (закон Гука
- 10. Сила Архимеда. Архимедова сила, действующая на тело, погруженное в жидкость (или газ), равна весу жидкости (или
- 11. Импульс. Импульсом материальной точки (количеством движения) называется величина P = m v. Импульсом системы называют величину,
- 12. Механическая работа. Мощность. Механическая работа - это скалярная величина, равная скалярному произведению вектора силы на вектор
- 13. Кинетическая энергия. Кинетической энергией называют энергию, являющейся мерой его механического движения и измеряющейся той работой, которую
- 14. Потенциальная энергия. Если материальная точка или тело в каждой точке пространства подвергается воздействию других тел, то
- 15. Закон сохранения энергии. В замкнутой системе энергия системы может переходить из одних видов в другие и
- 16. Абсолютно упругий удар. Законы сохранения импульса и энергии
- 18. Скачать презентацию
Динамика. Первый закон Ньютона.
Динамика изучает связь между взаимодействием тел и
Динамика. Первый закон Ньютона.
Динамика изучает связь между взаимодействием тел и
Сила.
Силой называется физическая величина, являющаяся мерой механического воздействия на рассматриваемое
Сила.
Силой называется физическая величина, являющаяся мерой механического воздействия на рассматриваемое
Масса. Второй закон Ньютона.
Тела обладают свойством инертности, т.е. под действием
Масса. Второй закон Ньютона.
Тела обладают свойством инертности, т.е. под действием
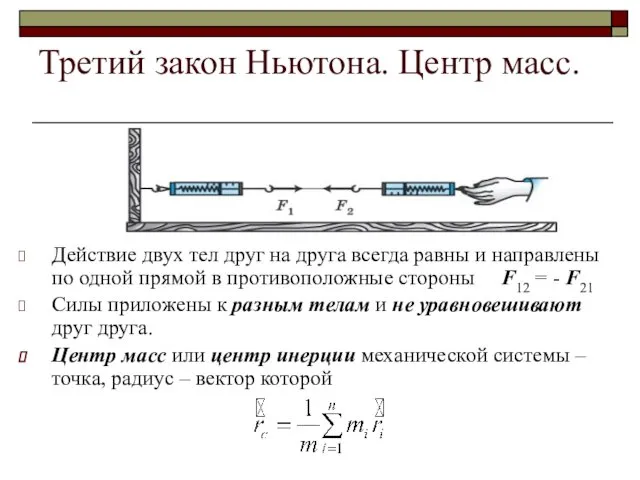
Третий закон Ньютона. Центр масс.
Действие двух тел друг на друга всегда
Третий закон Ньютона. Центр масс.
Действие двух тел друг на друга всегда
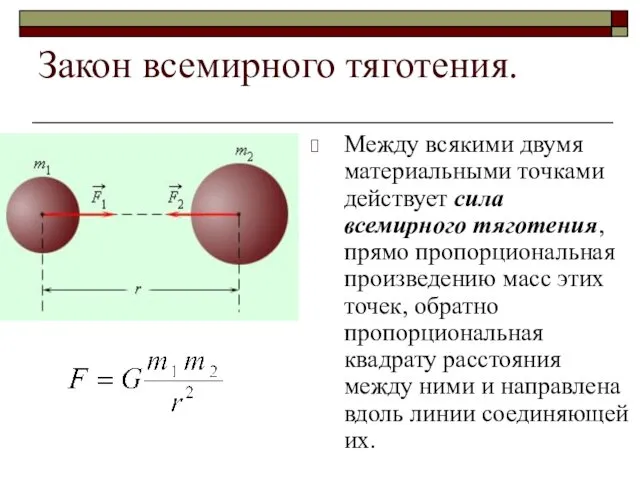
Закон всемирного тяготения.
Между всякими двумя материальными точками действует сила всемирного тяготения,
Закон всемирного тяготения.
Между всякими двумя материальными точками действует сила всемирного тяготения,
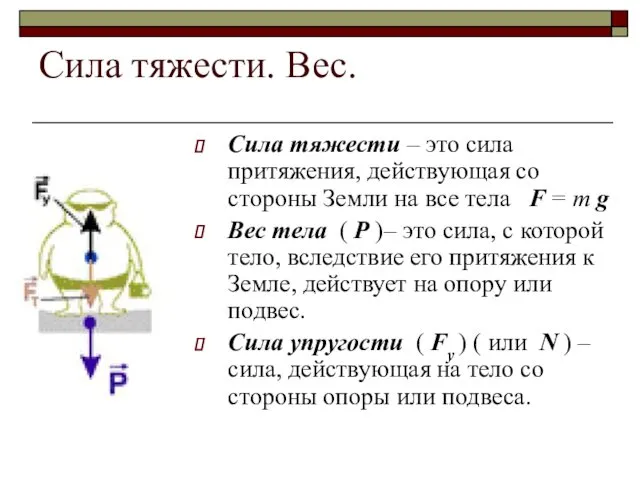
Сила тяжести. Вес.
Сила тяжести – это сила притяжения, действующая со стороны
Сила тяжести. Вес.
Сила тяжести – это сила притяжения, действующая со стороны
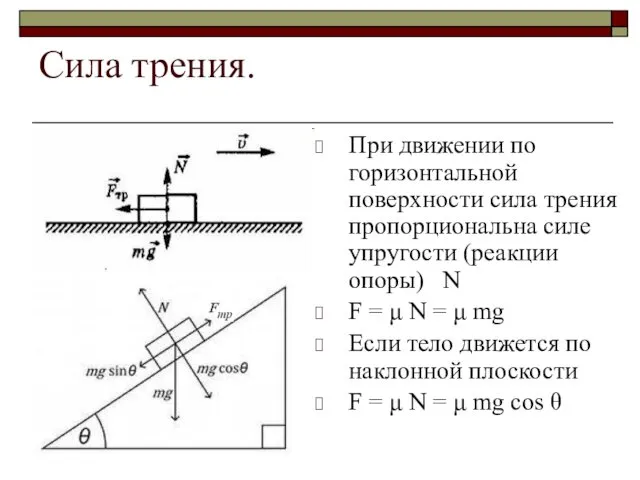
Сила трения.
При движении по горизонтальной поверхности сила трения пропорциональна силе упругости
Сила трения.
При движении по горизонтальной поверхности сила трения пропорциональна силе упругости
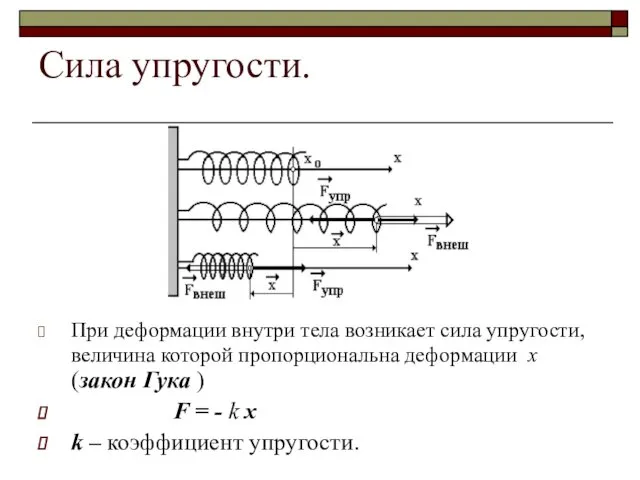
Сила упругости.
При деформации внутри тела возникает сила упругости, величина которой пропорциональна
Сила упругости.
При деформации внутри тела возникает сила упругости, величина которой пропорциональна
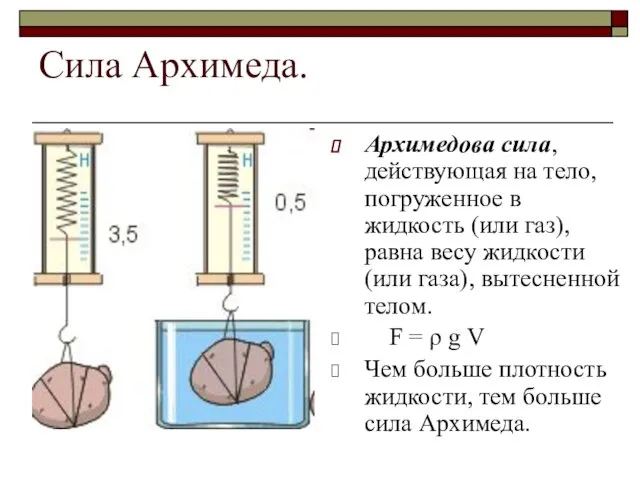
Сила Архимеда.
Архимедова сила, действующая на тело, погруженное в жидкость (или газ),
Сила Архимеда.
Архимедова сила, действующая на тело, погруженное в жидкость (или газ),
Импульс.
Импульсом материальной точки (количеством движения) называется величина P = m v.
Импульсом
Импульс.
Импульсом материальной точки (количеством движения) называется величина P = m v.
Импульсом
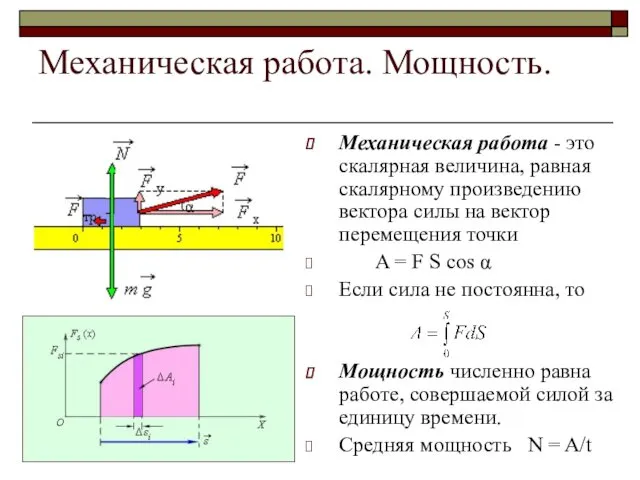
Механическая работа. Мощность.
Механическая работа - это скалярная величина, равная скалярному произведению
Механическая работа. Мощность.
Механическая работа - это скалярная величина, равная скалярному произведению
Кинетическая энергия.
Кинетической энергией называют энергию, являющейся мерой его механического движения и
Кинетическая энергия.
Кинетической энергией называют энергию, являющейся мерой его механического движения и
Потенциальная энергия.
Если материальная точка или тело в каждой точке пространства подвергается
Потенциальная энергия.
Если материальная точка или тело в каждой точке пространства подвергается
Закон сохранения энергии.
В замкнутой системе энергия системы может переходить из одних
Закон сохранения энергии.
В замкнутой системе энергия системы может переходить из одних

Абсолютно упругий удар.
Законы сохранения импульса и энергии
Абсолютно упругий удар.
Законы сохранения импульса и энергии
 Постоянный электрический ток
Постоянный электрический ток Электромагнетизм. Уравнения Максвелла. Лекция 4
Электромагнетизм. Уравнения Максвелла. Лекция 4 Электромагнитное поле. Электромагнитные волны
Электромагнитное поле. Электромагнитные волны Лабораторная работа по физике в 11 классе Наблюдение линейчатого и сплошного спектров
Лабораторная работа по физике в 11 классе Наблюдение линейчатого и сплошного спектров Датчики. Датчики крутящего момента. Датчики уровня
Датчики. Датчики крутящего момента. Датчики уровня Процедура разборки КПП Wet 8DCT (D8LF1)
Процедура разборки КПП Wet 8DCT (D8LF1) Unusual modes pf transport
Unusual modes pf transport Техническая термодинамика. Второй закон термодинамики. (Лекция 3)
Техническая термодинамика. Второй закон термодинамики. (Лекция 3) Простые механизмы. Работа. Мощность. Энергия
Простые механизмы. Работа. Мощность. Энергия Способы восстановления деталей
Способы восстановления деталей Магнитное поле. 11 класс
Магнитное поле. 11 класс Физические явления
Физические явления Электростатика. Электризация. Заряд. Взаимодействие зарядов. Закон Кулона
Электростатика. Электризация. Заряд. Взаимодействие зарядов. Закон Кулона Волновые процессы. Эффект Допплера. (Лекция 1)
Волновые процессы. Эффект Допплера. (Лекция 1) Электростатика. Тема 1. Электростатическое поле в вакууме
Электростатика. Тема 1. Электростатическое поле в вакууме Урок № 36 2 Промывочные жидкости
Урок № 36 2 Промывочные жидкости Линзы. Понятие о линзе
Линзы. Понятие о линзе Закони збереження в механіці
Закони збереження в механіці Электромагнитная индукция. Энергия магнитного поля. Лекция №11
Электромагнитная индукция. Энергия магнитного поля. Лекция №11 Модель атома. Опыт Резерфорда. Постулаты Бора
Модель атома. Опыт Резерфорда. Постулаты Бора Гидродинамика
Гидродинамика Охлаждение, нагревание тел конечных размеров. Нагрев параллелепипеда
Охлаждение, нагревание тел конечных размеров. Нагрев параллелепипеда Анализ сигналов
Анализ сигналов Физико – химические характеристики электротехнических материалов
Физико – химические характеристики электротехнических материалов Коробка скоростей
Коробка скоростей Электроразведка. Электромагнитные зондирования
Электроразведка. Электромагнитные зондирования Лекция 15. Тема: Закон Био-Савара - Лапласа
Лекция 15. Тема: Закон Био-Савара - Лапласа Предыстория радиотехники. Лекция 1
Предыстория радиотехники. Лекция 1