- Fast and Simple Physics using Sequential Impulses

Содержание
- 2. Physics Engine Checklist Collision and contact Friction: static and dynamic Stacking Joints Fast, simple, and robust
- 3. Box2D Demo It’s got collision It’s got friction It’s got stacking It’s got joints Check the
- 4. Fast and Simple Physics Penalty method? Nope Linear complementarity (LCP)? Nope Joint coordinates (Featherstone)? Nope Particles
- 5. Why Impulses? Most people don’t hate impulses The math is almost understandable Intuition often works Impulses
- 6. Making Impulses not Suck Impulses are good at making things bounce. Many attempts to use impulses
- 7. Impulses without the Bounce Forget bounces for a moment. Let’s concentrate on keeping things still. It’s
- 8. The 5 Step Program Accept penetration Remember the past Apply impulses early and often Pursue the
- 9. Penetration Performance Simplicity Coherence Game logic Fewer cracks
- 10. Algorithm Overview Compute contact points Apply forces (gravity) Apply impulses Update position Loop
- 11. Contact Points Position, normal, and penetration Box-box using the SAT Find the axis of minimum penetration
- 12. Box-Box SAT First find the separating axis with the minimum penetration. In 2D the separating axis
- 13. Box-Box Clipping Setup Identify reference face Identify incident face incident reference
- 14. Box-Box Clipping Clip incident face against reference face side planes (but not the reference face). Consider
- 15. Feature Flip-Flop Which normal is the separating axis? Apply weightings to prefer one axis over another.
- 16. Apply Forces Newton’s Law Ignore gyroscopic term for improved stability Use Euler’s rule
- 17. Impulses Impulses are applied at each contact point. Normal impulses to prevent penetration. Tangent impulses to
- 18. Computing the Impulse 1 2
- 19. Linear Momentum We know the direction of the normal impulse. We only need it’s magnitude. The
- 20. Relative Velocity Along Normal:
- 21. The Normal Impulse Want: Get: Fine Print:
- 22. Bias Impulse Give the normal impulse some extra oomph. Proportional to the penetration. Allow some slop.
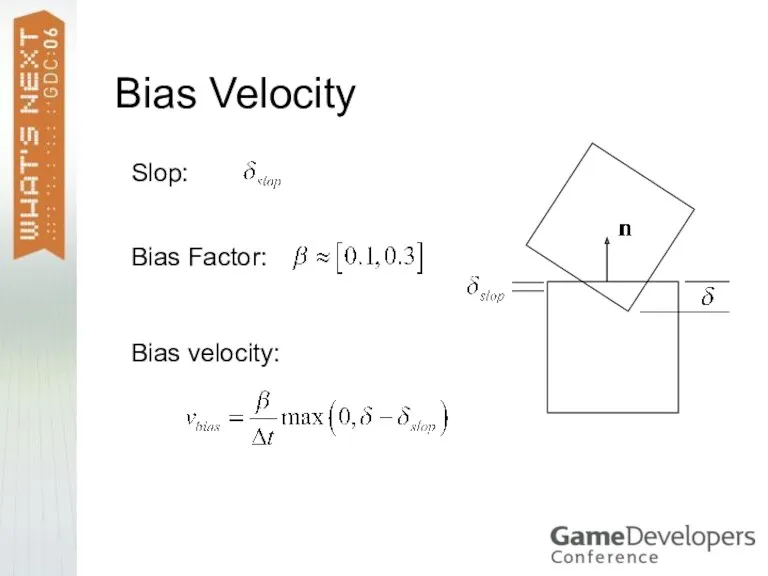
- 23. Bias Velocity Slop: Bias Factor: Bias velocity:
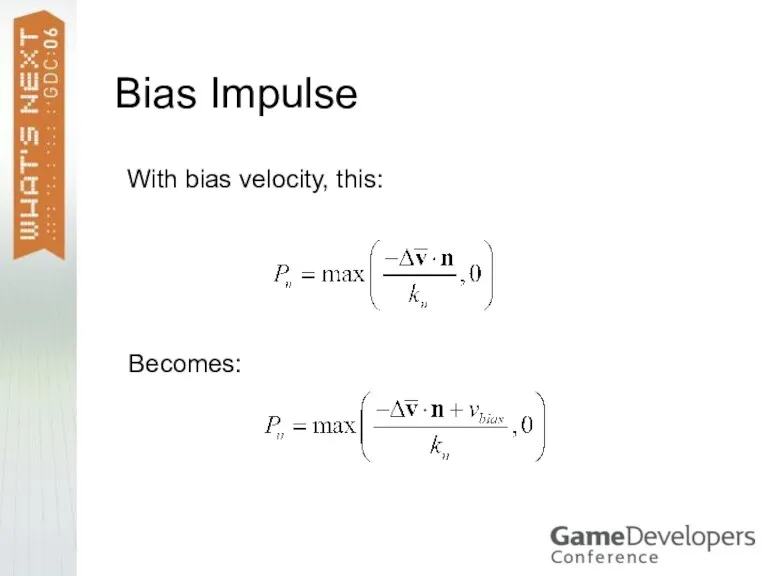
- 24. Bias Impulse Becomes: With bias velocity, this:
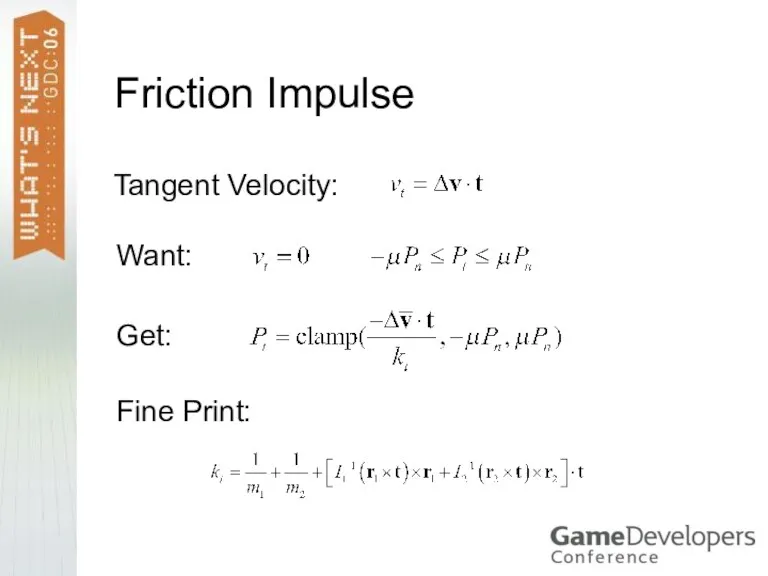
- 25. Friction Impulse Want: Get: Fine Print: Tangent Velocity:
- 26. Sequential Impulses Apply an impulse at each contact point. Continue applying impulses for several iterations. Terminate
- 27. Naïve Impulses velocity Each impulse is computed independently, leading to jitter. velocity
- 28. Where Did We Go Wrong? Each contact point forgets its impulse history. Each contact point requires
- 29. Accumulated Impulses velocity Each impulse adds to the total. Increments can be negative.
- 30. The True Impulse Each impulse adds to an accumulated impulse for each contact point. The accumulated
- 31. Accumulated Impulse Clamp the accumulated impulse, not the incremental impulses. Accumulated impulses:
- 32. Correct Clamping Normal Clamping: Friction Clamping:
- 33. Position Update Use the new velocities to integrate the positions. The time step is complete.
- 34. Extras Coherence Feature-based contact points Joints Engine layout Loose ends 3D Issues
- 35. Coherence Apply old accumulated impulses at the beginning of the step. Less iterations and greater stability.
- 36. Feature-Based Contact Points Each contact point is the result of clipping. It is the junction of
- 37. Contact Point IDs
- 38. Joints Specify (constrain) part of the motion. Compute the impulse necessary to achieve the constraint. Use
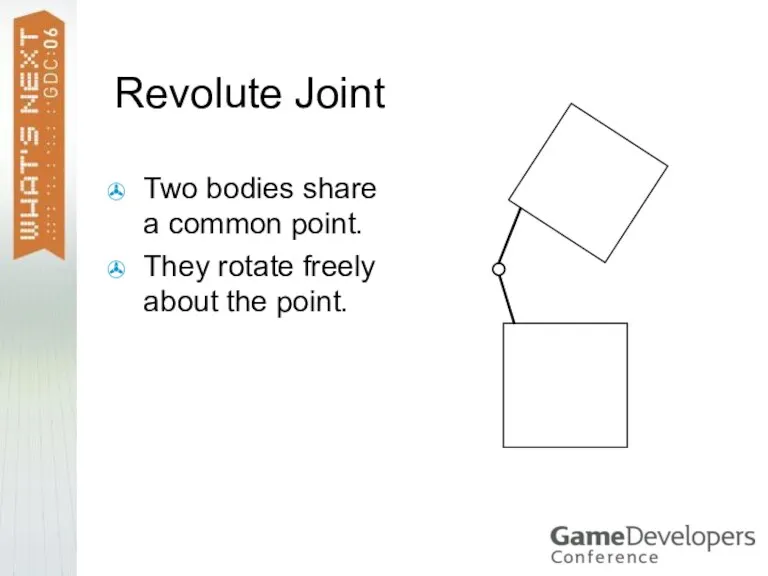
- 39. Revolute Joint Two bodies share a common point. They rotate freely about the point.
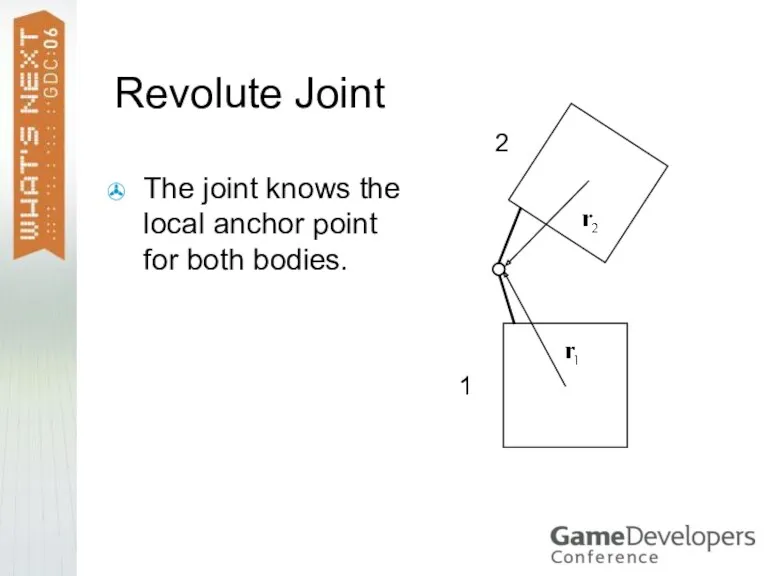
- 40. Revolute Joint The joint knows the local anchor point for both bodies. 1 1 2
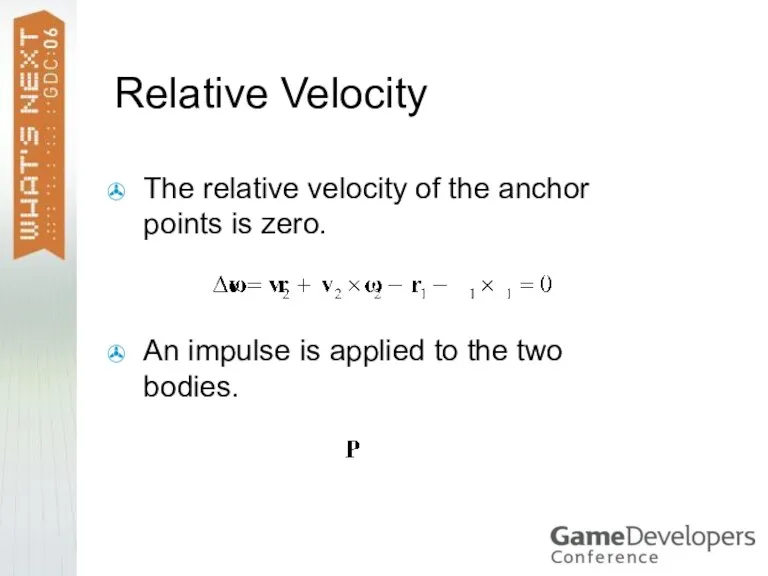
- 41. Relative Velocity The relative velocity of the anchor points is zero. An impulse is applied to
- 42. Linear Momentum Apply linear momentum to the relative velocity to get: Fine Print: Tilde (~) for
- 43. K Matrix 2-by-2 matrix in 2D, 3-by-3 in 3D. Symmetric positive definite. Think of K as
- 44. Bias Impulse The error is the separation between the anchor points Center of mass: x Bias
- 45. Engine Layout The World class contains all bodies, contacts, and joints. Contacts are maintained by the
- 46. Arbiter An arbiter exists for every touching pair of boxes. Provides coherence. Matches new and old
- 47. Arbiters 1 2 Arbiter
- 48. Collision Coherence Use the arbiter to store the separating axis. Improve performance at the cost of
- 49. More on Arbiters Arbiters are stored in a set according to the ordered body pointers. Use
- 50. Loose Ends Ground is represented with bodies whose inverse mass is zero. Contact mass can be
- 51. 3D Issues Friction requires two axes. Align the axes with velocity if it is non-zero. Identify
- 52. Questions? http://www.gphysics.com erincatto at that domain Download the code there. Buy Tomb Raider Legend!
- 54. Скачать презентацию
Physics Engine Checklist
Collision and contact
Friction: static and dynamic
Stacking
Joints
Fast, simple, and robust
Physics Engine Checklist
Collision and contact
Friction: static and dynamic
Stacking
Joints
Fast, simple, and robust
Box2D Demo
It’s got collision
It’s got friction
It’s got stacking
It’s got joints
Check the
Box2D Demo
It’s got collision
It’s got friction
It’s got stacking
It’s got joints
Check the
Fast and Simple Physics
Penalty method?
Nope
Linear complementarity (LCP)?
Nope
Joint coordinates (Featherstone)?
Nope
Particles (Jakobsen)?
Nope
Impulses?
Bingo!
Fast and Simple Physics
Penalty method?
Nope
Linear complementarity (LCP)?
Nope
Joint coordinates (Featherstone)?
Nope
Particles (Jakobsen)?
Nope
Impulses?
Bingo!
Why Impulses?
Most people don’t hate impulses
The math is almost understandable
Intuition often
Why Impulses?
Most people don’t hate impulses
The math is almost understandable
Intuition often
Making Impulses not Suck
Impulses are good at making things bounce.
Many attempts
Making Impulses not Suck
Impulses are good at making things bounce.
Many attempts
Impulses without the Bounce
Forget bounces for a moment.
Let’s concentrate on keeping
Impulses without the Bounce
Forget bounces for a moment.
Let’s concentrate on keeping
The 5 Step Program
Accept penetration
Remember the past
Apply impulses early and often
Pursue
The 5 Step Program
Accept penetration
Remember the past
Apply impulses early and often
Pursue
Penetration
Performance
Simplicity
Coherence
Game logic
Fewer cracks
Penetration
Performance
Simplicity
Coherence
Game logic
Fewer cracks
Algorithm Overview
Compute contact points
Apply forces (gravity)
Apply impulses
Update position
Loop
Algorithm Overview
Compute contact points
Apply forces (gravity)
Apply impulses
Update position
Loop
Contact Points
Position, normal, and penetration
Box-box using the SAT
Find the axis of
Contact Points
Position, normal, and penetration
Box-box using the SAT
Find the axis of
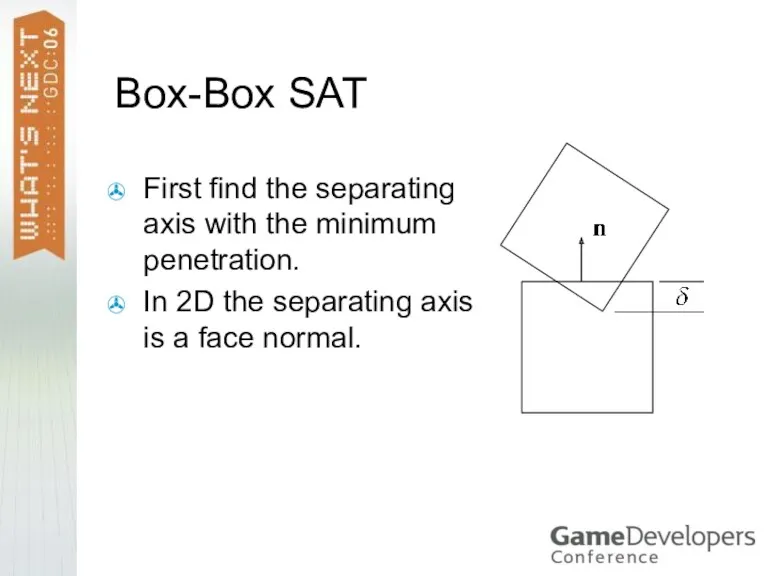
Box-Box SAT
First find the separating axis with the minimum penetration.
In 2D
Box-Box SAT
First find the separating axis with the minimum penetration.
In 2D
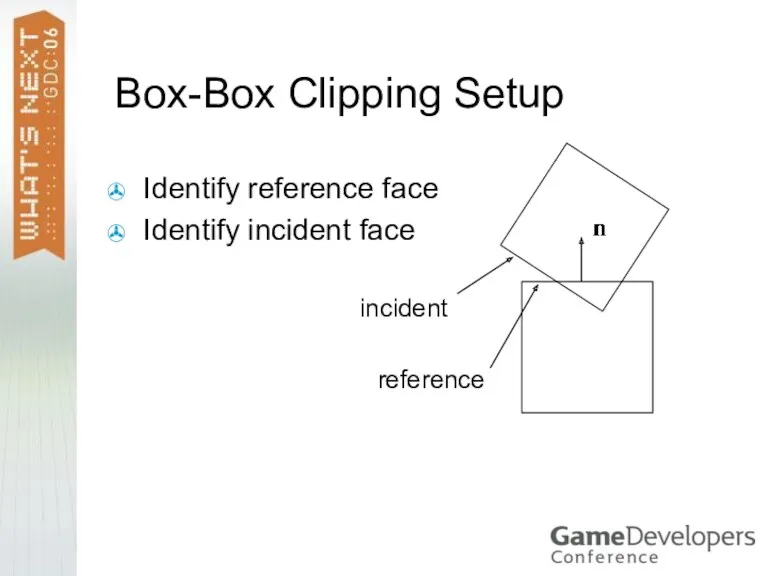
Box-Box Clipping Setup
Identify reference face
Identify incident face
incident
reference
Box-Box Clipping Setup
Identify reference face
Identify incident face
incident
reference
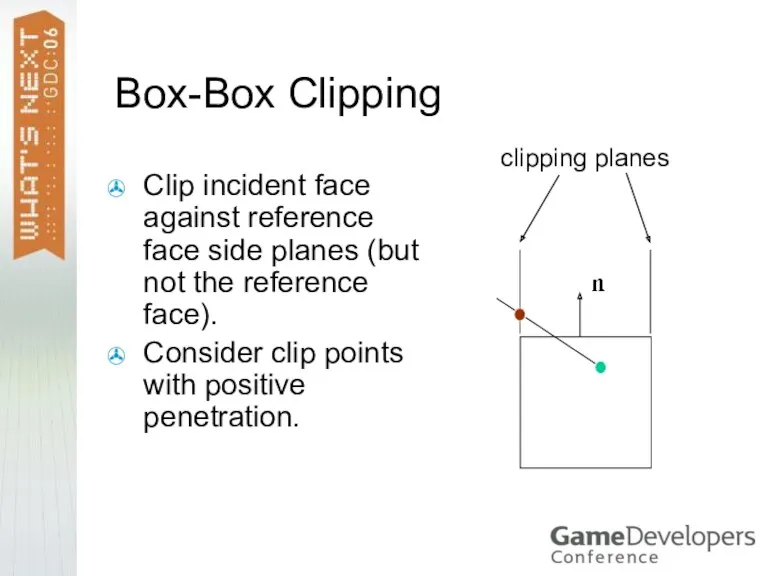
Box-Box Clipping
Clip incident face against reference face side planes (but not
Box-Box Clipping
Clip incident face against reference face side planes (but not
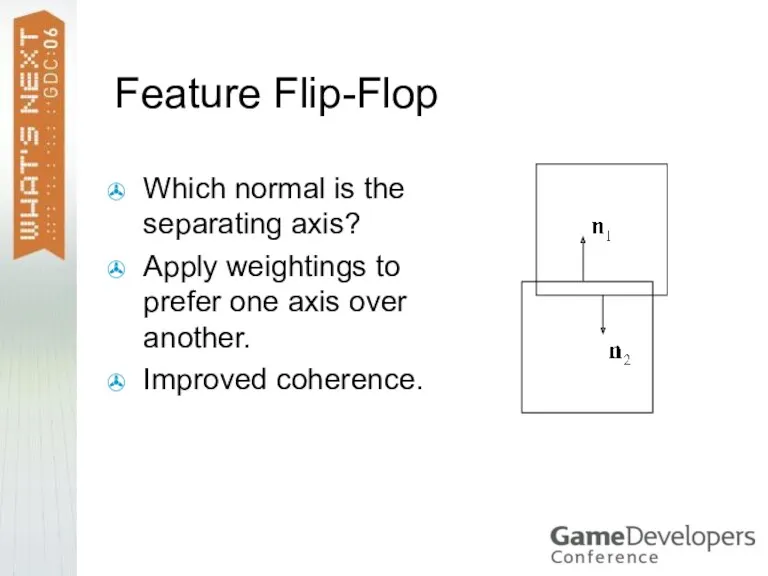
Feature Flip-Flop
Which normal is the separating axis?
Apply weightings to prefer one
Feature Flip-Flop
Which normal is the separating axis?
Apply weightings to prefer one
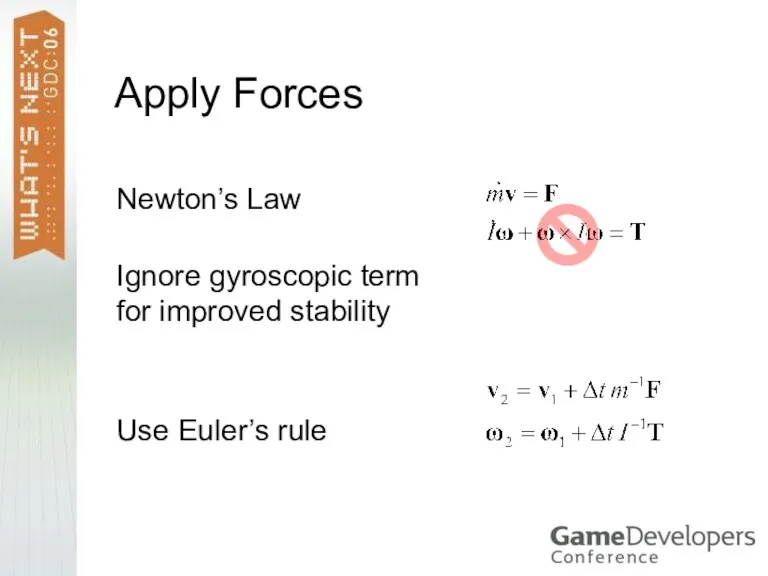
Apply Forces
Newton’s Law
Ignore gyroscopic term for improved stability
Use Euler’s rule
Apply Forces
Newton’s Law
Ignore gyroscopic term for improved stability
Use Euler’s rule
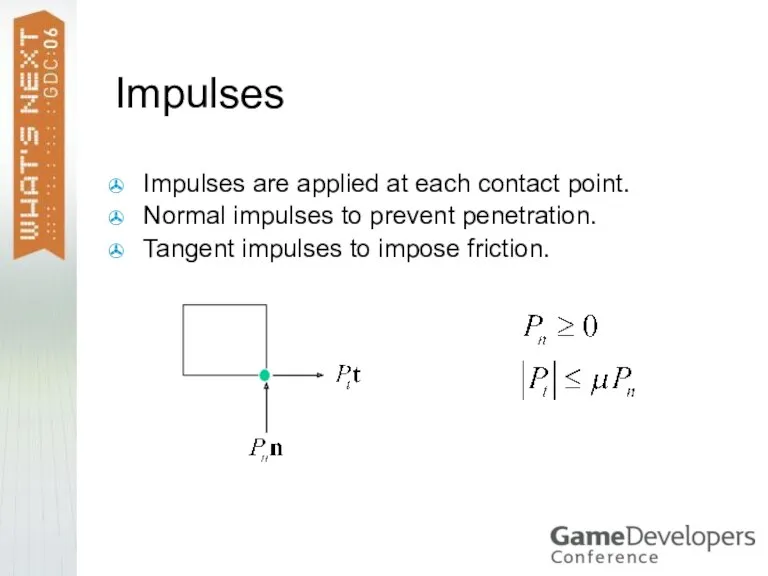
Impulses
Impulses are applied at each contact point.
Normal impulses to prevent penetration.
Tangent
Impulses
Impulses are applied at each contact point.
Normal impulses to prevent penetration.
Tangent
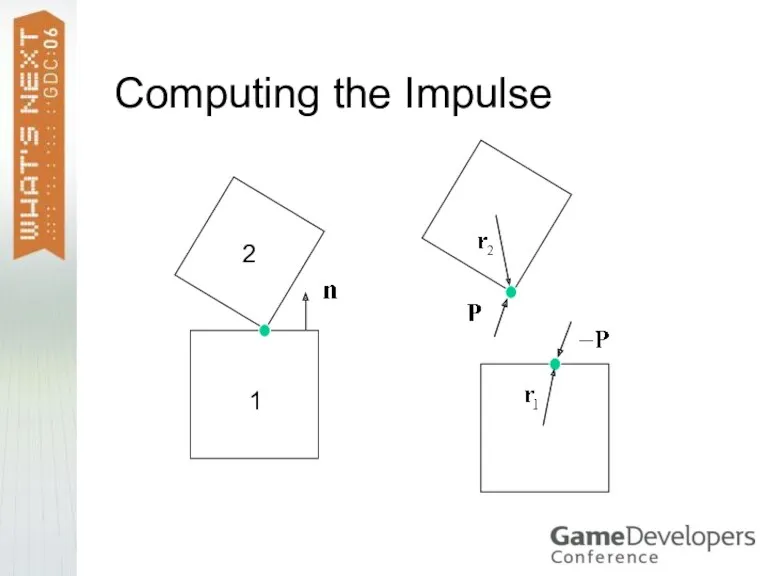
Computing the Impulse
1
2
Computing the Impulse
1
2
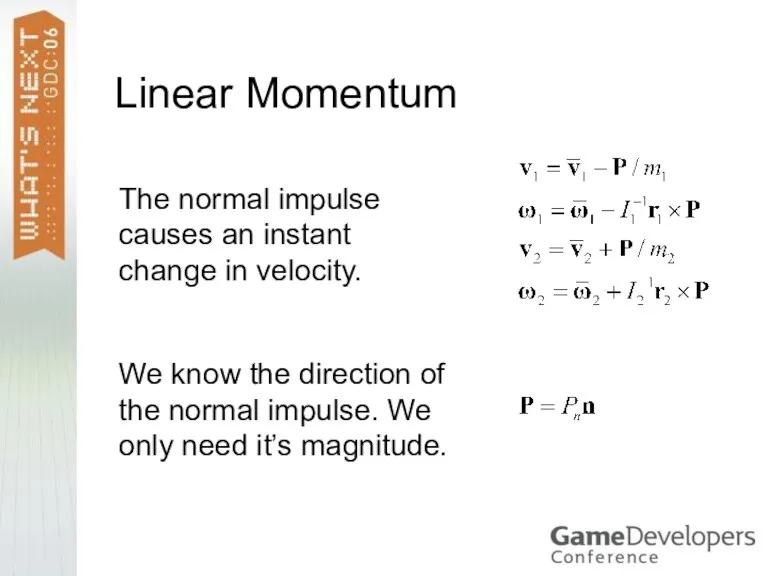
Linear Momentum
We know the direction of the normal impulse. We only
Linear Momentum
We know the direction of the normal impulse. We only
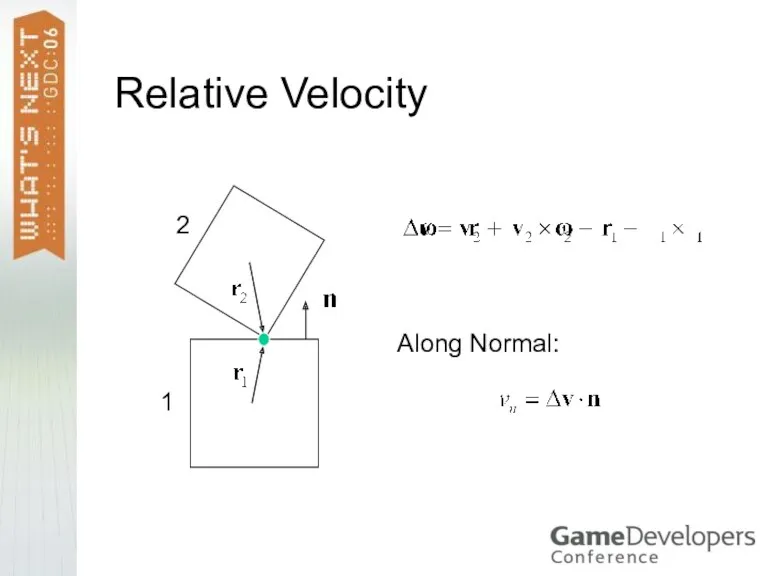
Relative Velocity
Along Normal:
Relative Velocity
Along Normal:
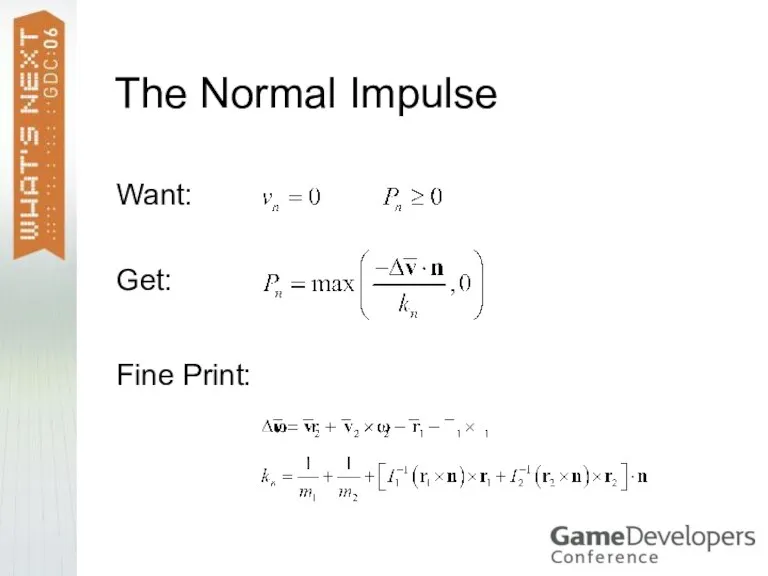
The Normal Impulse
Want:
Get:
Fine Print:
The Normal Impulse
Want:
Get:
Fine Print:
Bias Impulse
Give the normal impulse some extra oomph.
Proportional to the penetration.
Allow
Bias Impulse
Give the normal impulse some extra oomph.
Proportional to the penetration.
Allow
Bias Velocity
Slop:
Bias Factor:
Bias velocity:
Bias Velocity
Slop:
Bias Factor:
Bias velocity:
Bias Impulse
Becomes:
With bias velocity, this:
Bias Impulse
Becomes:
With bias velocity, this:
Friction Impulse
Want:
Get:
Fine Print:
Tangent Velocity:
Friction Impulse
Want:
Get:
Fine Print:
Tangent Velocity:
Sequential Impulses
Apply an impulse at each contact point.
Continue applying impulses for
Sequential Impulses
Apply an impulse at each contact point.
Continue applying impulses for
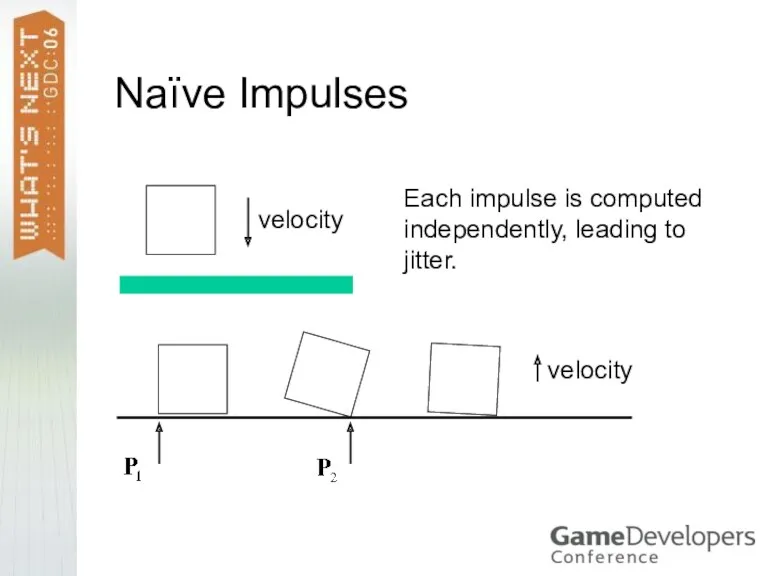
Naïve Impulses
velocity
Each impulse is computed independently, leading to jitter.
velocity
Naïve Impulses
velocity
Each impulse is computed independently, leading to jitter.
velocity
Where Did We Go Wrong?
Each contact point forgets its impulse history.
Each
Where Did We Go Wrong?
Each contact point forgets its impulse history.
Each
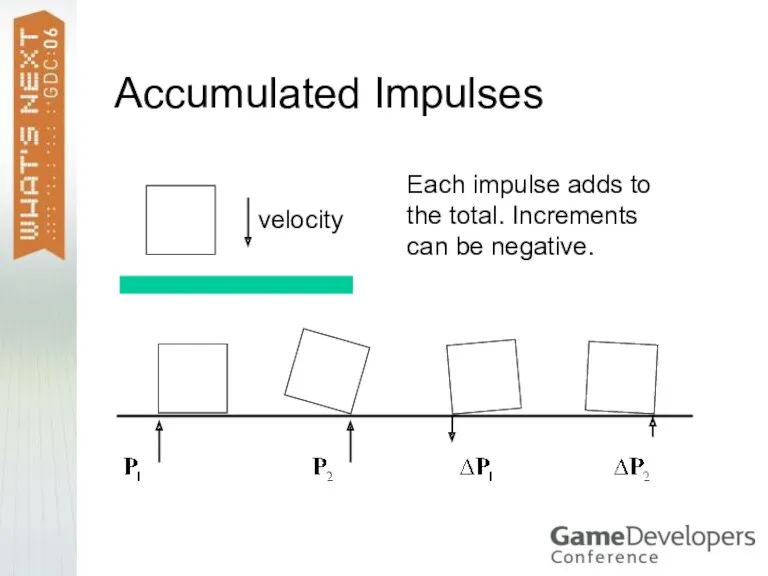
Accumulated Impulses
velocity
Each impulse adds to the total. Increments can be negative.
Accumulated Impulses
velocity
Each impulse adds to the total. Increments can be negative.
The True Impulse
Each impulse adds to an accumulated impulse for each
The True Impulse
Each impulse adds to an accumulated impulse for each
Accumulated Impulse
Clamp the accumulated impulse, not the incremental impulses.
Accumulated impulses:
Accumulated Impulse
Clamp the accumulated impulse, not the incremental impulses.
Accumulated impulses:
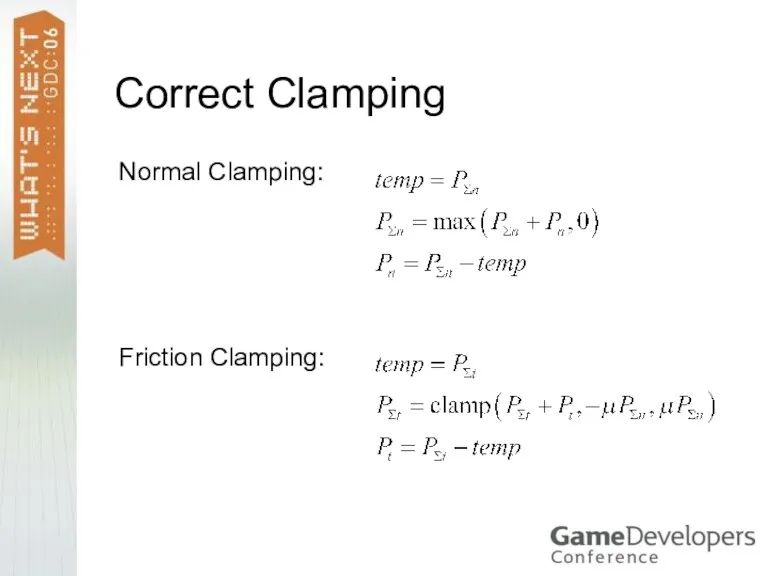
Correct Clamping
Normal Clamping:
Friction Clamping:
Correct Clamping
Normal Clamping:
Friction Clamping:
Position Update
Use the new velocities to integrate the positions.
The time step
Position Update
Use the new velocities to integrate the positions.
The time step
Extras
Coherence
Feature-based contact points
Joints
Engine layout
Loose ends
3D Issues
Extras
Coherence
Feature-based contact points
Joints
Engine layout
Loose ends
3D Issues
Coherence
Apply old accumulated impulses at the beginning of the step.
Less iterations
Coherence
Apply old accumulated impulses at the beginning of the step.
Less iterations
Feature-Based Contact Points
Each contact point is the result of clipping.
It is
Feature-Based Contact Points
Each contact point is the result of clipping.
It is
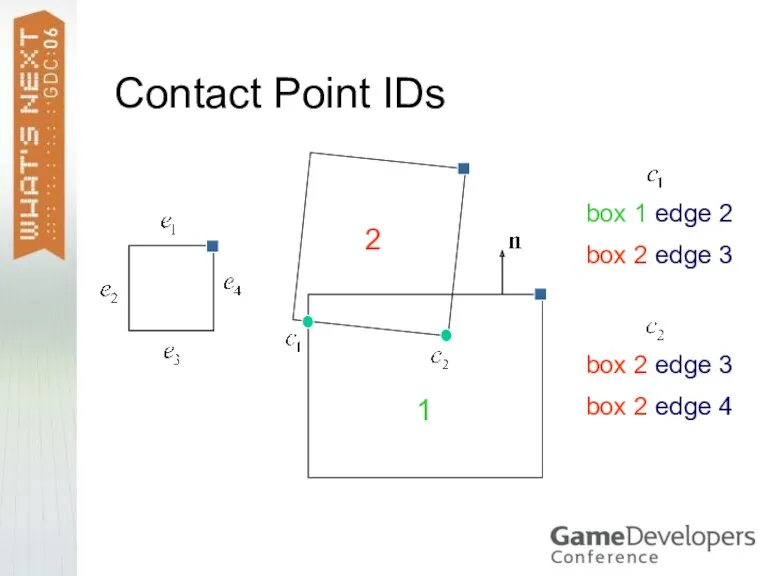
Contact Point IDs
Contact Point IDs
Joints
Specify (constrain) part of the motion.
Compute the impulse necessary to achieve
Joints
Specify (constrain) part of the motion.
Compute the impulse necessary to achieve
Revolute Joint
Two bodies share a common point.
They rotate freely about the
Revolute Joint
Two bodies share a common point.
They rotate freely about the
Revolute Joint
The joint knows the local anchor point for both bodies.
1
1
2
Revolute Joint
The joint knows the local anchor point for both bodies.
1
1
2
Relative Velocity
The relative velocity of the anchor points is zero.
An impulse
Relative Velocity
The relative velocity of the anchor points is zero.
An impulse
Linear Momentum
Apply linear momentum to the relative velocity to get:
Fine Print:
Tilde
Linear Momentum
Apply linear momentum to the relative velocity to get:
Fine Print:
Tilde
K Matrix
2-by-2 matrix in 2D, 3-by-3 in 3D.
Symmetric positive definite.
Think of
K Matrix
2-by-2 matrix in 2D, 3-by-3 in 3D.
Symmetric positive definite.
Think of
Bias Impulse
The error is the separation between the anchor points
Center of
Bias Impulse
The error is the separation between the anchor points
Center of
Engine Layout
The World class contains all bodies, contacts, and joints.
Contacts are
Engine Layout
The World class contains all bodies, contacts, and joints.
Contacts are
Arbiter
An arbiter exists for every touching pair of boxes.
Provides coherence.
Matches new
Arbiter
An arbiter exists for every touching pair of boxes.
Provides coherence.
Matches new

Arbiters
1
2
Arbiter
Arbiters
1
2
Arbiter
Collision Coherence
Use the arbiter to store the separating axis.
Improve performance at
Collision Coherence
Use the arbiter to store the separating axis.
Improve performance at
More on Arbiters
Arbiters are stored in a set according to the
More on Arbiters
Arbiters are stored in a set according to the
Loose Ends
Ground is represented with bodies whose inverse mass is zero.
Contact
Loose Ends
Ground is represented with bodies whose inverse mass is zero.
Contact
3D Issues
Friction requires two axes.
Align the axes with velocity if it
3D Issues
Friction requires two axes.
Align the axes with velocity if it
Questions?
http://www.gphysics.com
erincatto at that domain
Download the code there.
Buy Tomb Raider Legend!
Questions?
http://www.gphysics.com
erincatto at that domain
Download the code there.
Buy Tomb Raider Legend!
 Презентация по физике 7 класс. Тема: Плотность вещества
Презентация по физике 7 класс. Тема: Плотность вещества интерференция света
интерференция света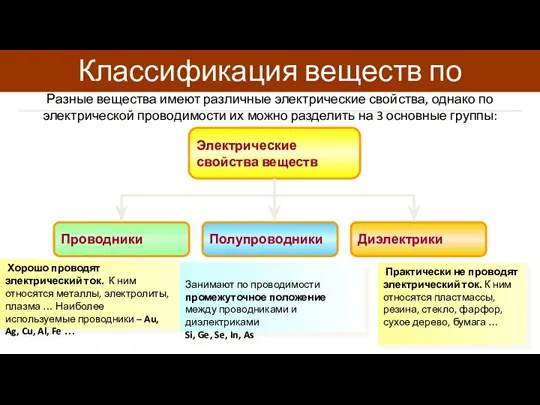 Классификация веществ по проводимости
Классификация веществ по проводимости Резка металла. Тема 7
Резка металла. Тема 7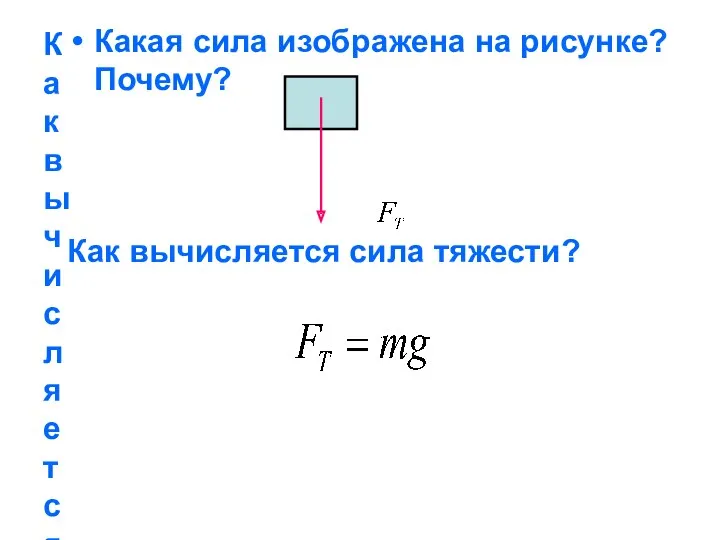 Чему равна сила упругости?
Чему равна сила упругости? Влажность, влагоемкость, водо- нефте- газонасыщенность
Влажность, влагоемкость, водо- нефте- газонасыщенность 7 нче сыйныф Көч берәмлекләре
7 нче сыйныф Көч берәмлекләре Последовательное соединение проводников
Последовательное соединение проводников Accumulation of electricity. Leadacid batteries
Accumulation of electricity. Leadacid batteries Ядерная физика
Ядерная физика Atomic theory and structure of an atom
Atomic theory and structure of an atom Ferroelectrics: historical introduction
Ferroelectrics: historical introduction Сферические зеркала, построение изображения в сферическом зеркале
Сферические зеркала, построение изображения в сферическом зеркале Углеродные наноструктуры
Углеродные наноструктуры Зачетная работа по физике
Зачетная работа по физике Молекулярно-кинетическая теория
Молекулярно-кинетическая теория Дифракция света
Дифракция света Nuclear fuel cycle
Nuclear fuel cycle Линзы. Ход лучей в линзах
Линзы. Ход лучей в линзах Динамика колебаний. (Раздел 2. Тема 8)
Динамика колебаний. (Раздел 2. Тема 8) Радиоактивность как свидетельство сложного строения атома
Радиоактивность как свидетельство сложного строения атома Давление газа и твердых тел
Давление газа и твердых тел Плазмалық технологиялардың физикалық негіздері
Плазмалық технологиялардың физикалық негіздері Закон отражения света
Закон отражения света Основные этапы развития радиотехники и связи. Предыстория (1600-1894 гг.). Лекция 3
Основные этапы развития радиотехники и связи. Предыстория (1600-1894 гг.). Лекция 3 Звуковые волны. Звук
Звуковые волны. Звук Механические свойства твердых тел
Механические свойства твердых тел Физика в картинках
Физика в картинках