- Многополюсники. Четырехполюсники

Содержание
- 2. Для решения поставленной задачи необходимо располагать системой уравнений, которые называются основными уравнениями 4-полюсника. Остановимся на первом
- 3. Аналогично могут быть установлены соотношения и для комплексных амплитуд токов и напряжений. Токи İ1, İ2 определяются
- 4. Когда 4-полюсник выполняет роль промежуточного звена, между источником и нагрузкой заданными часто являются параметры нагрузки İ2,
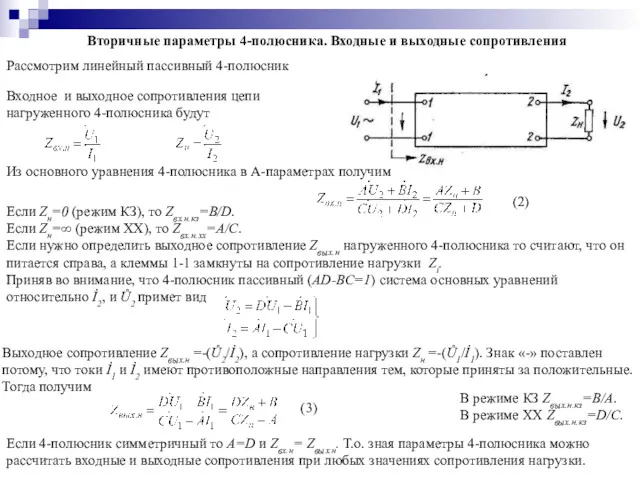
- 5. Вторичные параметры 4-полюсника. Входные и выходные сопротивления Рассмотрим линейный пассивный 4-полюсник Входное и выходное сопротивления цепи
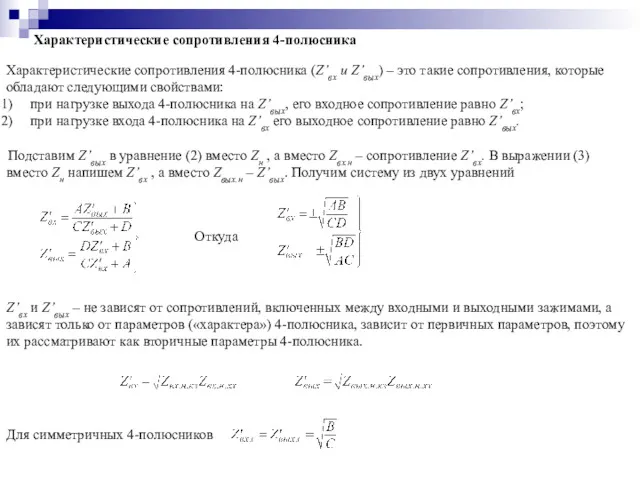
- 6. Характеристические сопротивления 4-полюсника Характеристические сопротивления 4-полюсника (Z’вх и Z’вых) – это такие сопротивления, которые обладают следующими
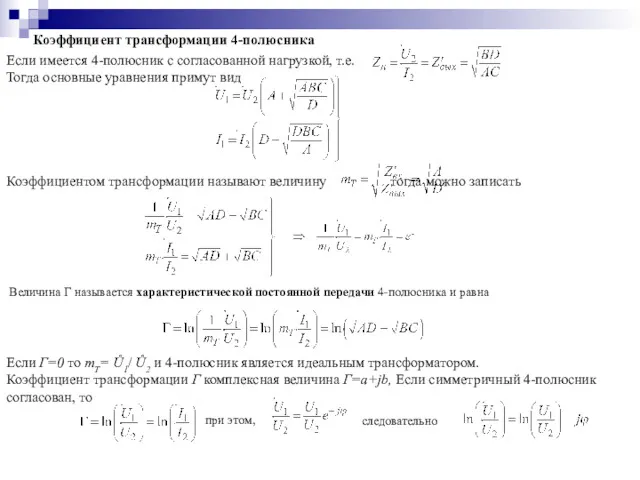
- 7. Коэффициент трансформации 4-полюсника Если имеется 4-полюсник с согласованной нагрузкой, т.е. Тогда основные уравнения примут вид Коэффициентом
- 8. Коэффициент a называется собственным (волновым) затуханием 4-полюсника. Коэффициент b называется коэффициентом фазы (фазовая постоянная). Постоянную передачи
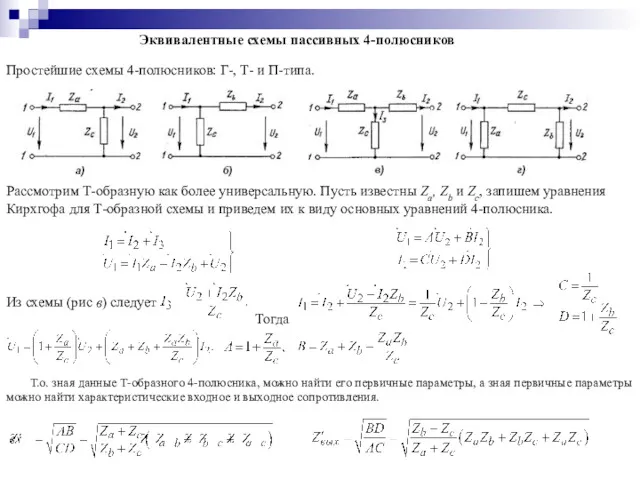
- 9. Эквивалентные схемы пассивных 4-полюсников Простейшие схемы 4-полюсников: Г-, Т- и П-типа. Рассмотрим Т-образную как более универсальную.
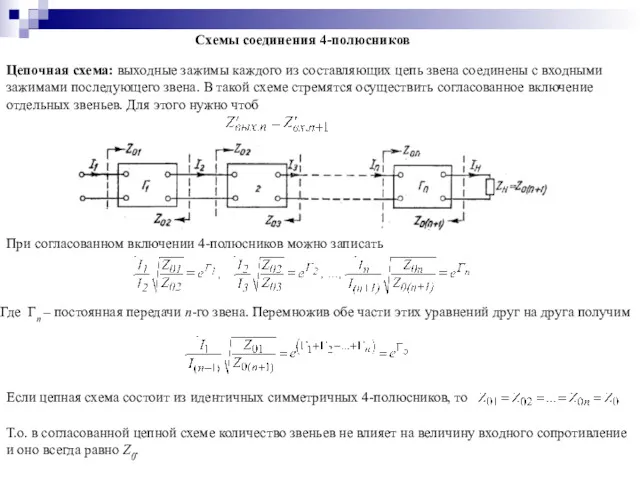
- 10. Схемы соединения 4-полюсников Цепочная схема: выходные зажимы каждого из составляющих цепь звена соединены с входными зажимами
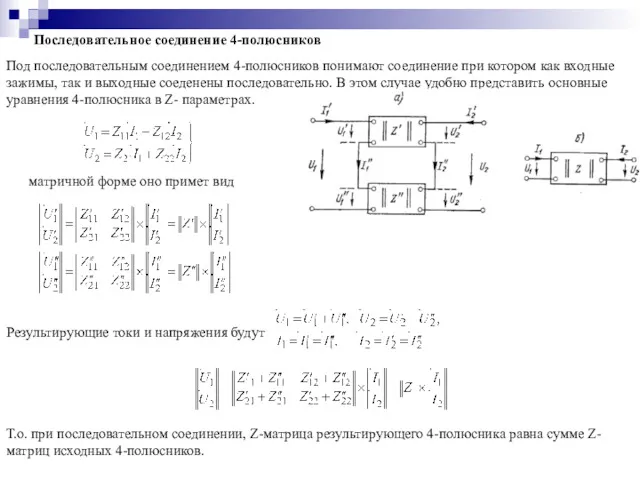
- 11. Последовательное соединение 4-полюсников Под последовательным соединением 4-полюсников понимают соединение при котором как входные зажимы, так и
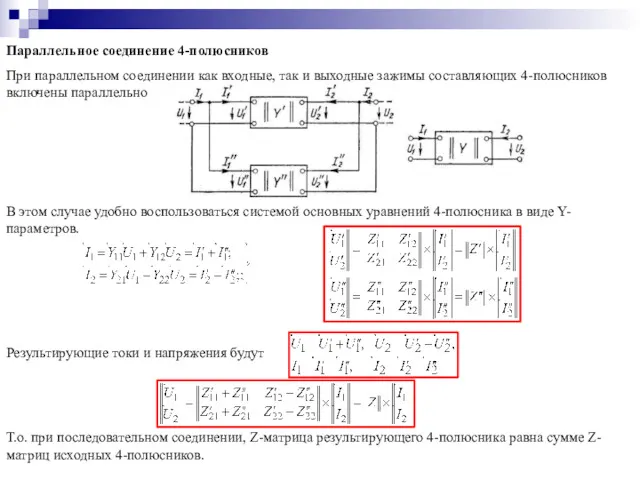
- 12. Параллельное соединение 4-полюсников При параллельном соединении как входные, так и выходные зажимы составляющих 4-полюсников включены параллельно
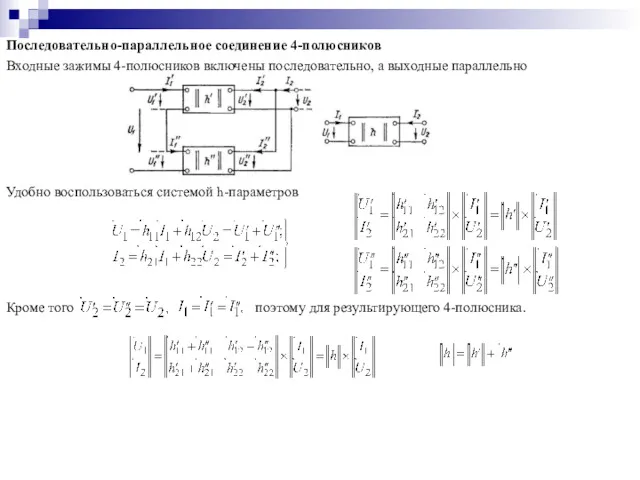
- 13. Последовательно-параллельное соединение 4-полюсников Входные зажимы 4-полюсников включены последовательно, а выходные параллельно Удобно воспользоваться системой h-параметров Кроме
- 14. Параллельно-последовательное соединение 4-полюсников Входные зажимы исходных 4-полюсников соединены параллельно, а выходные – последовательно Лучше воспользоваться основными
- 15. Активные 4-полюсники Необходимый критерий активности 4-полюсника: наличие источников электрической энергии. Достаточный критерием активности 4-полюсника: отдача электрической
- 16. Идеализированные схемы замещения реализуются с помощью операционных усилителей (ОУ) Схемы реализации односторонних управляемых источников имеют вид:
- 17. Пассивные ПС изменяют только величину и характер сопротивлений нагрузки (идеальный трансформатор, четвертьволновой трансформатор на отрезке ДЛ).
- 18. Рассмотрим типовую схему реализации КОС на ОУ. Данная схема является базовой при реализации всех остальных схем
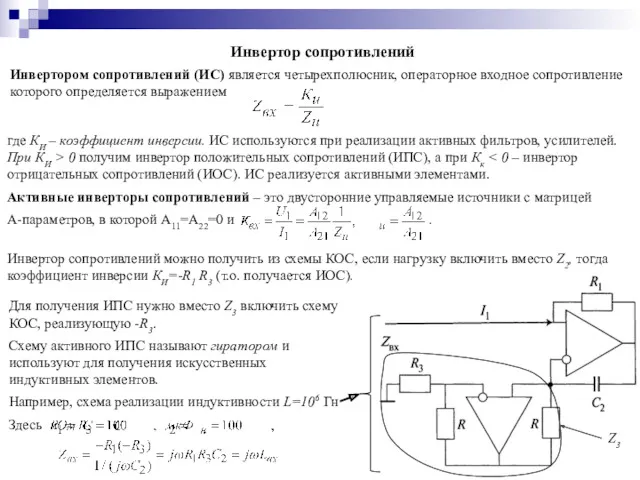
- 19. Инвертор сопротивлений Инвертором сопротивлений (ИС) является четырехполюсник, операторное входное сопротивление которого определяется выражением где КИ –
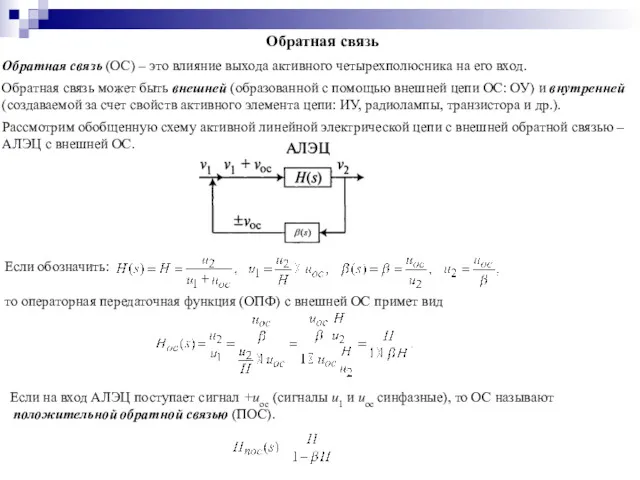
- 20. Обратная связь Обратная связь (ОС) – это влияние выхода активного четырехполюсника на его вход. Обратная связь
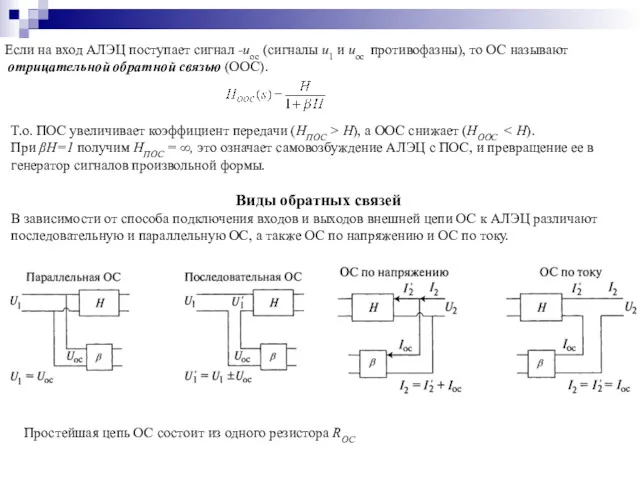
- 21. Если на вход АЛЭЦ поступает сигнал -uос (сигналы u1 и uос противофазны), то ОС называют отрицательной
- 22. Параллельная ОС по напряжению снижает Rвх и Rвых АЛЭЦ за счет шунтирования их RОС. Последовательная ОС
- 23. Рассмотрим влияние ОС на ширину полосы пропускания на примере НЧ- и ВЧ-звеньев с ОПФ s –
- 24. Аналогичными рассуждениями можно показать, что ПОС сужает ширину полосы пропускания АЛЭЦ (вывод самостоятельно). Влияние ООС и
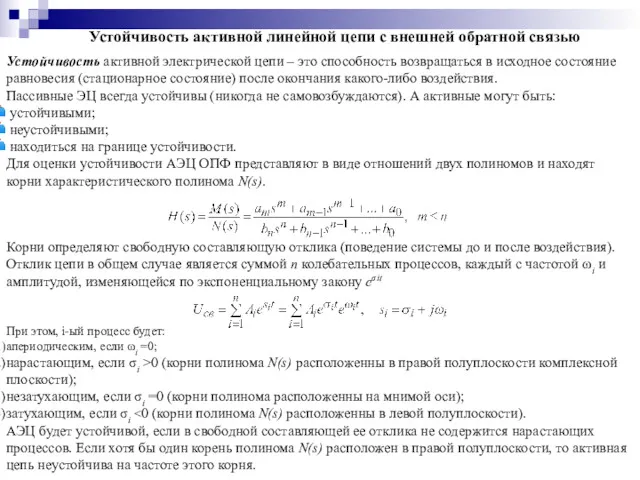
- 25. Устойчивость активной линейной цепи с внешней обратной связью Устойчивость активной электрической цепи – это способность возвращаться
- 26. Критерии определения устойчивости АЛЄЦ Критерий Михайлова - Гурвица Критерий Михайлова - Гурвица Основан на свойствах полинома
- 27. Критерий Гурвица 1. По заданному полиному N(s) составляют матрицу Гурвица размера п х п, для чего
- 28. Критерий Найквиста Критерий Найквиста используется для анализа устойчивости АЛЭЦ с внешней ОС, анализируется полином Величина Hp(s)=uос/u1
- 29. НЕГАРМОНИЧЕСКИЕ ВОЗДЕЙСТВИЯ В ЦЕПЯХ Законы коммутации в электрических цепях Коммутация – это мгновенное изменение структуры или
- 30. При анализе переходных процессов исходный установившийся режим называют начальными условиями. Они могут быть: нулевыми: iL(t)t ненулевыми:
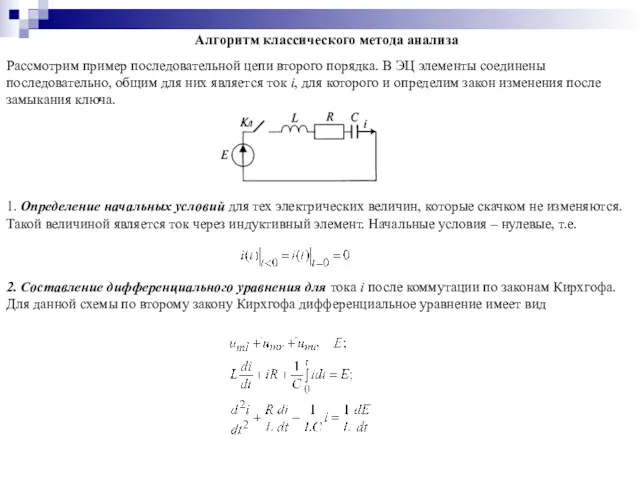
- 31. Алгоритм классического метода анализа Рассмотрим пример последовательной цепи второго порядка. В ЭЦ элементы соединены последовательно, общим
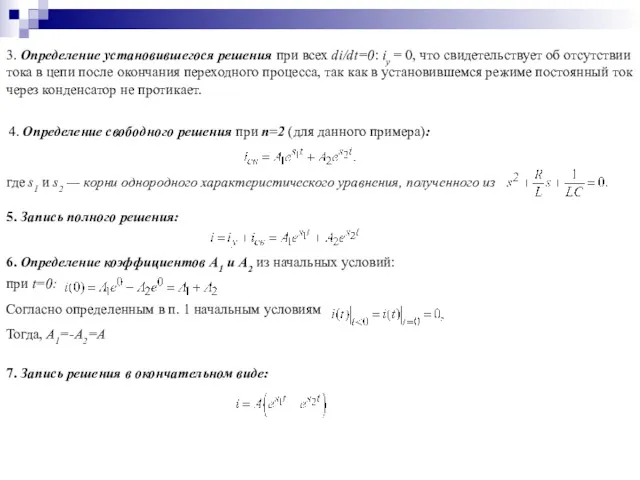
- 32. 4. Определение свободного решения при п=2 (для данного примера): где s1 и s2 — корни однородного
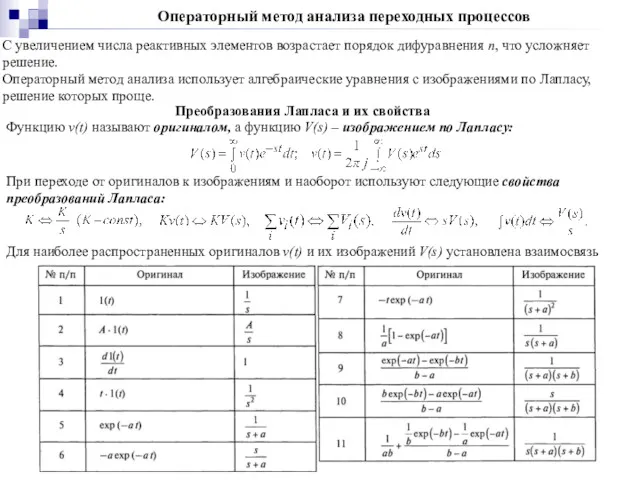
- 33. Операторный метод анализа переходных процессов С увеличением числа реактивных элементов возрастает порядок дифуравнения п, что усложняет
- 34. Операторные схемы замещения идеализированных элементов Постоянные параметры идеализированных источников имеют изображения Отношение изображений напряжения U(s) и
- 35. Операторная схема замещения реактивного элемента: При нулевых начальных условиях схема замещения совпадает с обычной схемой замещения
- 36. Алгоритм операторного метода анализа Алгоритм включает пять пунктов: 1. Определение начальных условий для оригиналов тока через
- 37. Пример алгоритма операторного метода на примере схемы разряда емкости 1. Полагаем, что во время процесса заряда
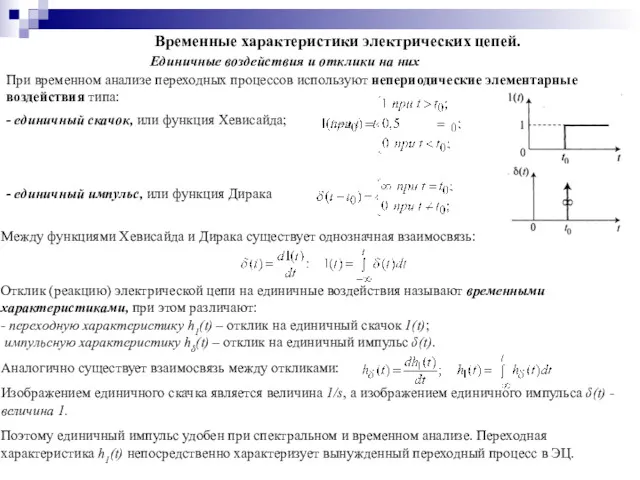
- 38. Временные характеристики электрических цепей. Единичные воздействия и отклики на них При временном анализе переходных процессов используют
- 39. Операторные передаточные и временные характеристики апериодической цепи первого порядка (АПЦ-1) Отношение изображения отклика цепи V2(s) к
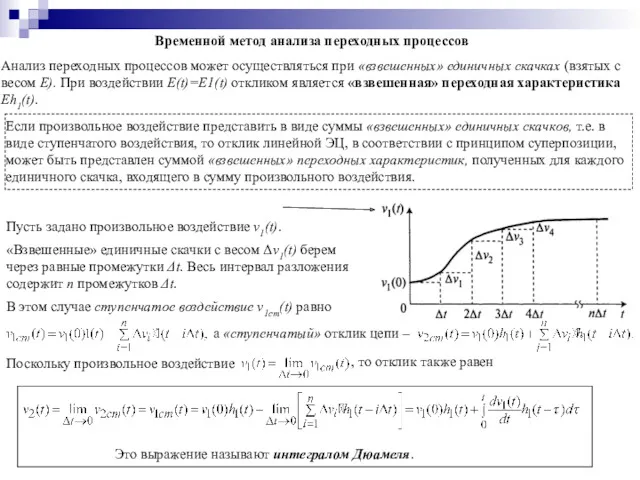
- 40. Временной метод анализа переходных процессов Анализ переходных процессов может осуществляться при «взвешенных» единичных скачках (взятых с
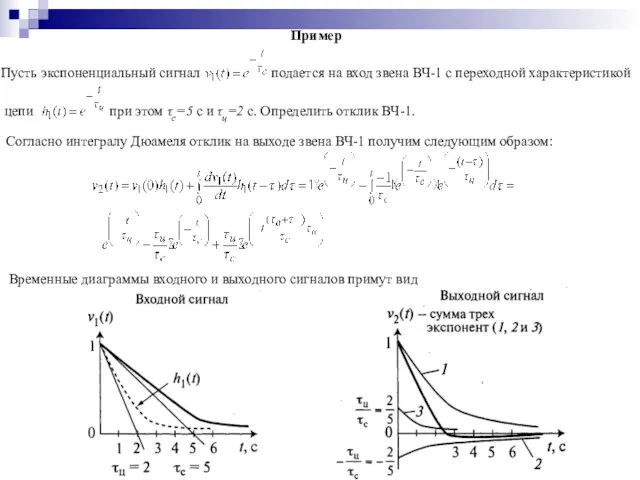
- 41. Пример Пусть экспоненциальный сигнал подается на вход звена ВЧ-1 с переходной характеристикой цепи при этом τс=5
- 42. Временные характеристики колебательных контуров Временные характеристики последовательного контура Для последовательного колебательного контура в качестве отклика рассмотрим
- 43. 7. Записываем окончательное решение, подставляя коэффициенты А1 и А2 , а также корни s1 и s2
- 44. Заменим источник напряжения эквивалентным источником тока. Согласно классическому методу анализа переходных процессов: Полагаем начальные условия нулевыми:
- 45. Следовательно 7. Записываем окончательное решение, подставляя коэффициенты А1 и А2 , а также корни s1 и
- 46. Фильтры - Фильтром нижних частот (ФНЧ) называют 4-полюсник у которых полоса прозрачности простирается от ω=0 до
- 47. Основные задачи теории фильтрации являются: 1. Установление условий, при которых фильтр может иметь полосу прозрачности. 2.
- 48. Условие прозрачности фильтра Часто фильтры строятся по Т- и П-образным схемам. Фильтр по условию согласован с
- 49. Граничные частоты полосы прозрачности Исходя из основного неравенства теории фильтров можно определить граничные частоты ПП. Поскольку
- 50. Частотные характеристики фильтра Частотными характеристиками фильтра являются частотная характеристика затухания (ЧХЗ) a(ω) и ФЧХ b(ω). В
- 51. Пример. Фильтр нижних частот У ФНЧ последовательная ветвь представляет малое сопротивления для нижних частот и большое
- 52. ФЧХ ФНЧ в полосе прозрачности: , в полосе затухания: b=180° ( т.к. ). Такого вида частотные
- 54. Синтез аналоговых фильтров Физически реализуемый фильтр всегда имеет переходную полосу (полосу расфильтровки) – между частотой среза
- 55. Числитель и знаменатель H(s) можно записать в виде произведения сомножителей первого порядка: Корни полинома числителя smʹ
- 56. Фильтры Баттерворта. Передаточная функция фильтра нижних частот Баттерворта n-го порядка характеризуется выражением АЧХ фильтра Баттерворта обладает
- 57. Фильтры Чебышева. Передаточная функция ФНЧ Чебышева n-го порядка характеризуется выражением Здесь Tn (ω) – полином Чебышева
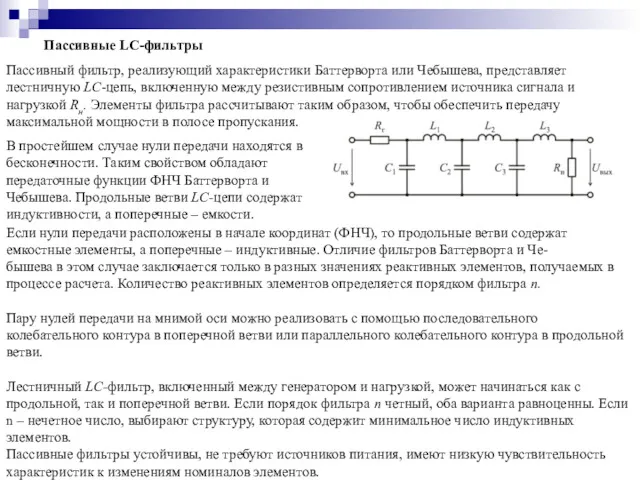
- 58. Пассивные LC-фильтры Пассивный фильтр, реализующий характеристики Баттерворта или Чебышева, представляет лестничную LC-цепь, включенную между резистивным сопротивлением
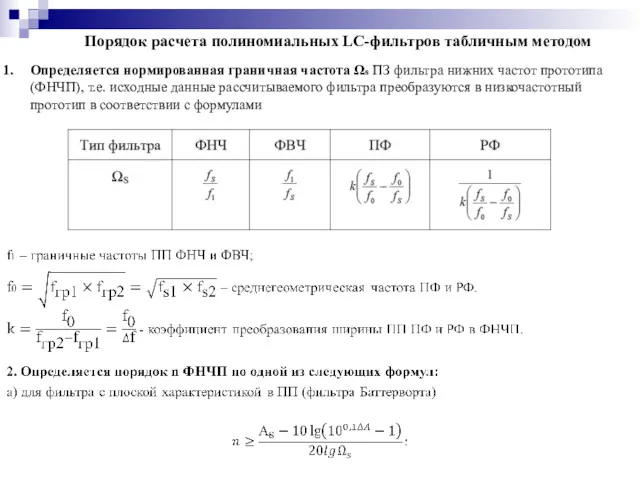
- 59. Порядок расчета полиномиальных LC-фильтров табличным методом Определяется нормированная граничная частота Ωs ПЗ фильтра нижних частот прототипа
- 60. Схемы ФНЧ прототипов
- 61. Таблицы нормированных LC элементов ФНЧП Баттерворта Чебышева
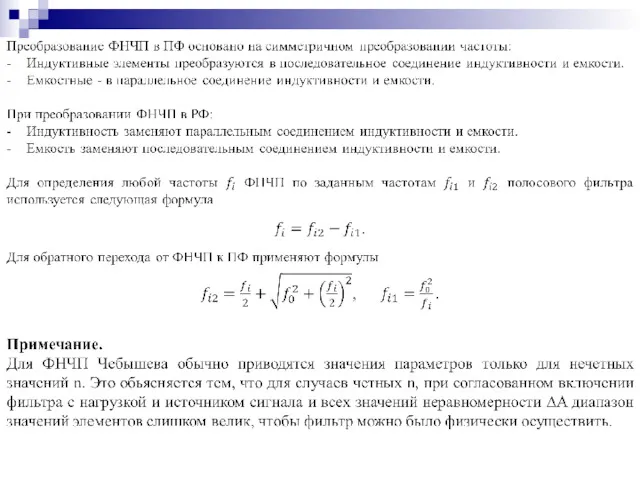
- 62. 5. Осуществляется преобразование нормированных элементов ФНЧП в элементы рассчитываемого фильтра. Преобразование схемы ФНЧ-прототипа в схему проектируемого
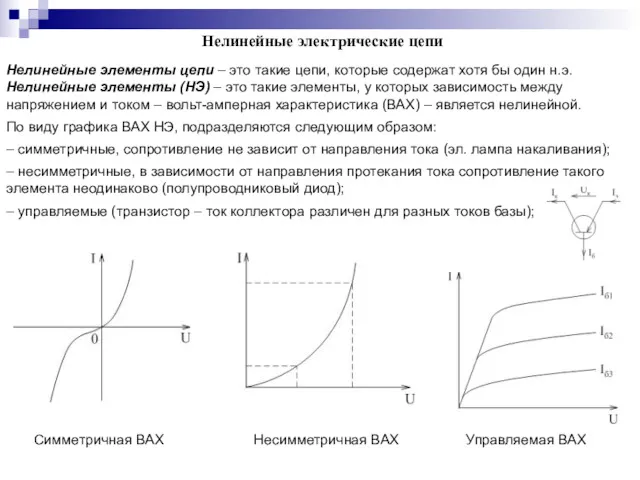
- 64. Нелинейные электрические цепи Нелинейные элементы цепи – это такие цепи, которые содержат хотя бы один н.э.
- 65. – Управляемая током ВАХ – в заданном интервале токов ток однозначно определяет напряжение u=V(i), но при
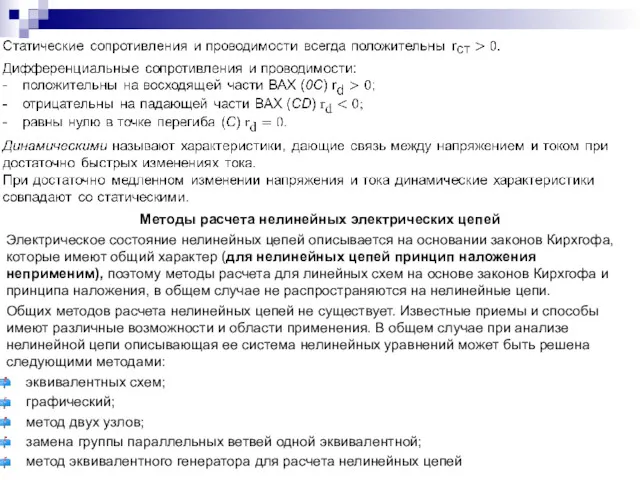
- 66. Методы расчета нелинейных электрических цепей Электрическое состояние нелинейных цепей описывается на основании законов Кирхгофа, которые имеют
- 67. Метод эквивалентных схем Применяется, когда нелинейные сопротивления (НС) работают на прямолинейных участках своих ВАХ, тогда можно
- 68. Графический метод Метод применяется для расчета цепей, содержащих только один источник, а НС, ВАХ которых задана
- 69. Расчет параллельного соединения. Пусть параллельно соединены два НС, ВАХ заданы графиками. Если задано подведенное напряжение, а
- 70. Расчет смешанного соединения. Пусть задано входное напряжения и ВАХ всех НС. Нужно определять токи. Записываем уравнения
- 71. Метод двух узлов. Если цепь с нелинейными элементами содержит два узла или сводится к схеме с
- 72. Замена группы параллельных ветвей одной эквивалентной. Допустим схема входит в состав сложной цепи. Требуется определить эквивалентную
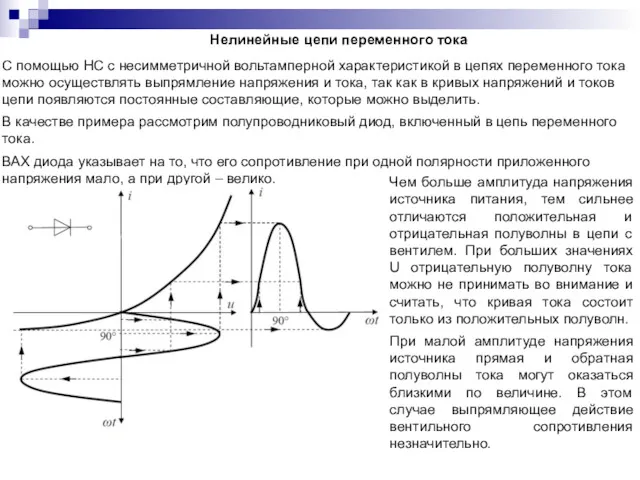
- 73. Нелинейные цепи переменного тока С помощью НС с несимметричной вольтамперной характеристикой в цепях переменного тока можно
- 74. Расчет режима работы трехполюсника для постоянных составляющих
- 75. Расчет режима работы трехполюсника для переменных составляющих напряжений и токов
- 76. Пример формирования амплитудной модуляции на базе схемы с биполярным транзистором При передаче информации по радиотехническому каналу
- 77. При амплитудной модуляции происходит преобразование спектра модулирующего сигнала, обычно низкочастотного, в область высоких частот. Спектр АМ
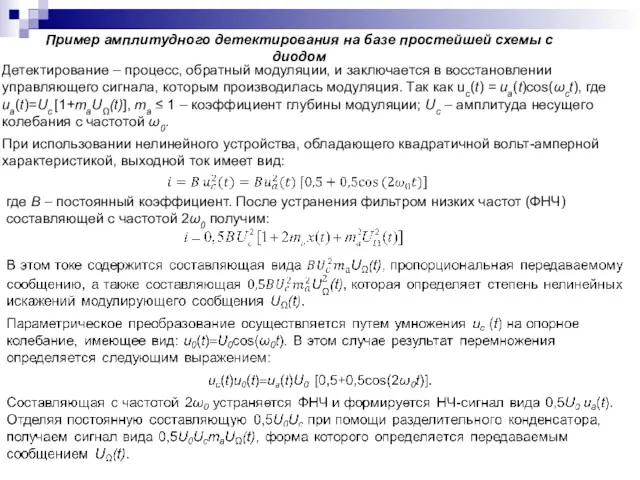
- 78. Пример амплитудного детектирования на базе простейшей схемы с диодом Детектирование – процесс, обратный модуляции, и заключается
- 79. На вход детектора поступает ВЧ-сигнал uc(t). Детектор являет последовательное соединение диода VD и нагрузочной цепи ФНЧ
- 80. Спектр АМ-сигнала Спектр АМ-сигнала после диода Спектр огибающей АМ-сигнала после ФНЧ
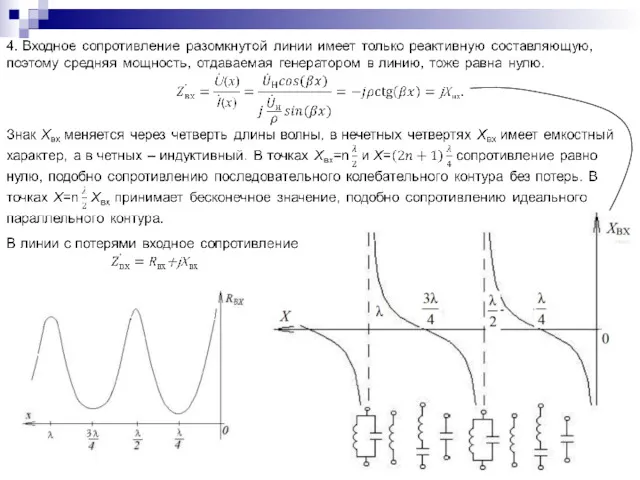
- 81. Электрические цепи с распределенными параметрами Уравнения однородной линии передачи
- 82. Строгое решение задачи о зависимости тока в линии от времени и координаты х может быть получено
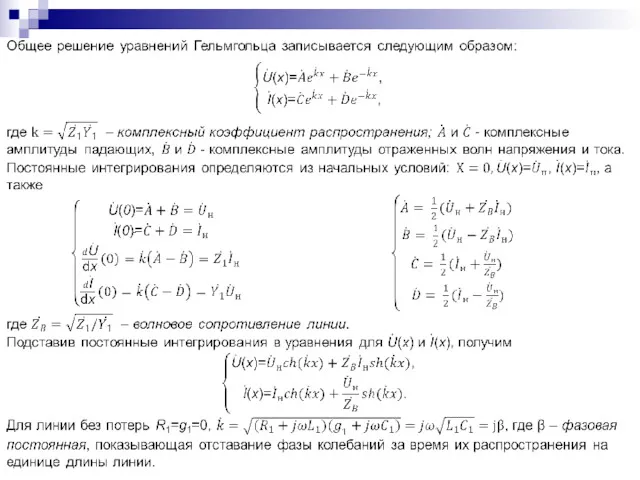
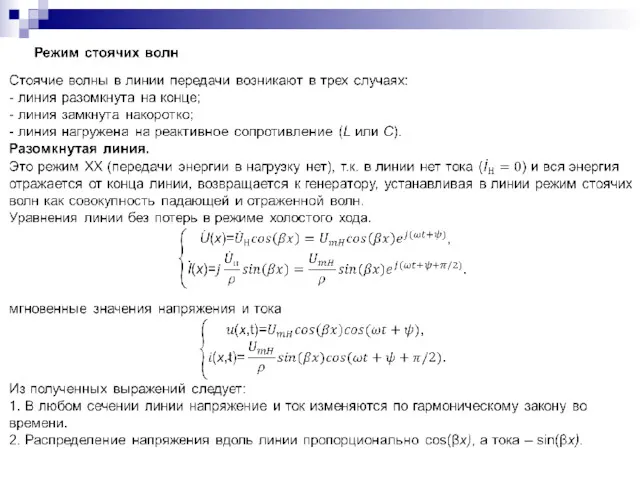
- 86. Из последних выражений следует: 1 ) В каждом сечении линии напряжение и ток изменяются по гармоническому
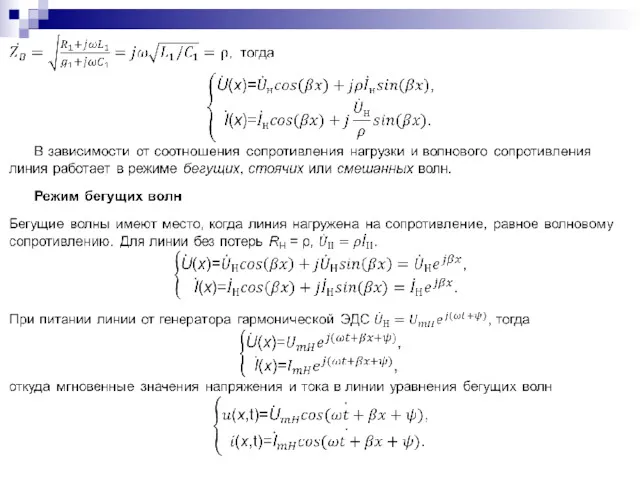
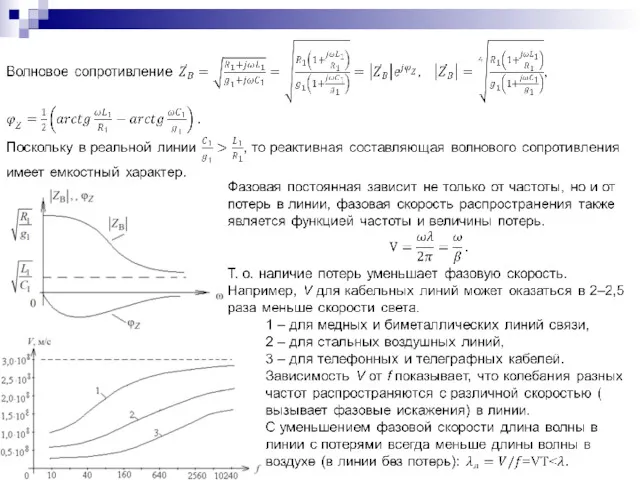
- 89. Вторичные (волновые) параметры однородной линии Зависимость α и β от частоты при передаче по линии сигналов,
- 92. Напряжение и ток в отдельных точках при любых t оказываются равными нулю. Положение этих точек, называемых
- 93. 3. Начальная фаза напряжения и тока в разных сечениях линии одинакова или отличается на угол π,
- 96. Входное сопротивление линии с потерями
- 99. Скачать презентацию
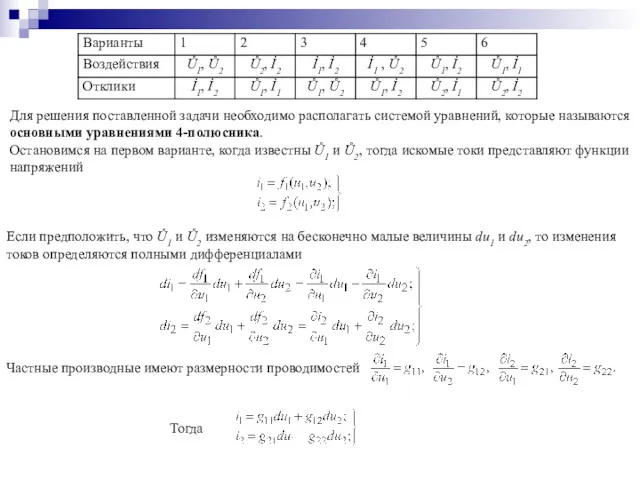
Для решения поставленной задачи необходимо располагать системой уравнений, которые называются основными
Для решения поставленной задачи необходимо располагать системой уравнений, которые называются основными
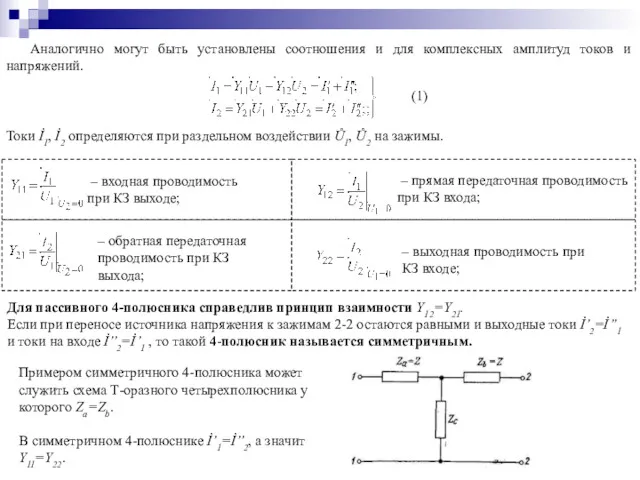
Аналогично могут быть установлены соотношения и для комплексных амплитуд токов и
Аналогично могут быть установлены соотношения и для комплексных амплитуд токов и
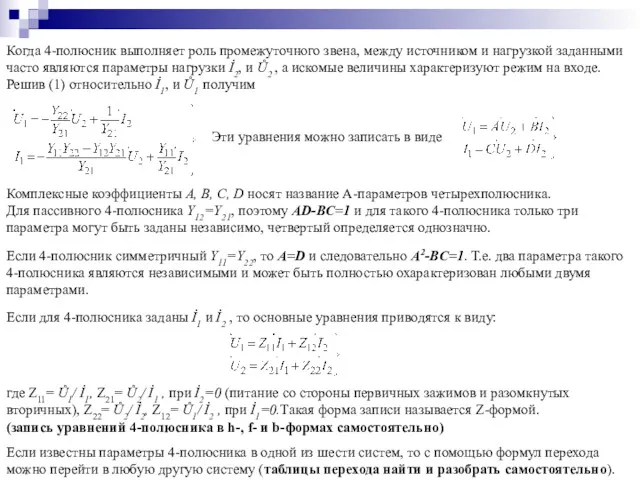
Когда 4-полюсник выполняет роль промежуточного звена, между источником и нагрузкой заданными
Когда 4-полюсник выполняет роль промежуточного звена, между источником и нагрузкой заданными
Вторичные параметры 4-полюсника. Входные и выходные сопротивления
Рассмотрим линейный пассивный 4-полюсник
Вторичные параметры 4-полюсника. Входные и выходные сопротивления
Рассмотрим линейный пассивный 4-полюсник
Характеристические сопротивления 4-полюсника
Характеристические сопротивления 4-полюсника (Z’вх и Z’вых) – это такие
Характеристические сопротивления 4-полюсника
Характеристические сопротивления 4-полюсника (Z’вх и Z’вых) – это такие
Коэффициент трансформации 4-полюсника
Если имеется 4-полюсник с согласованной нагрузкой, т.е.
Тогда основные уравнения
Коэффициент трансформации 4-полюсника
Если имеется 4-полюсник с согласованной нагрузкой, т.е.
Тогда основные уравнения
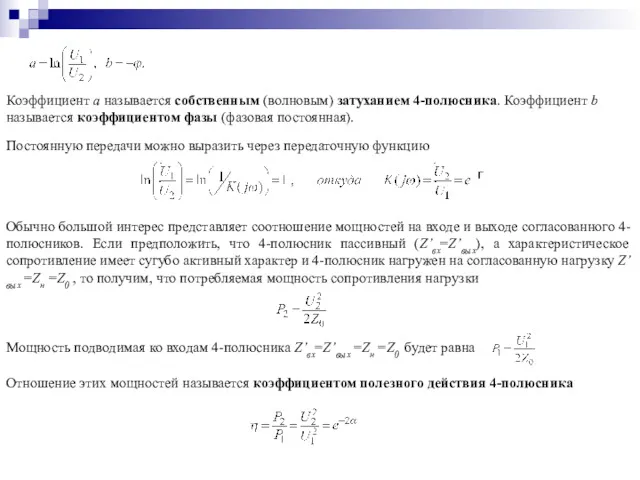
Коэффициент a называется собственным (волновым) затуханием 4-полюсника. Коэффициент b называется коэффициентом
Коэффициент a называется собственным (волновым) затуханием 4-полюсника. Коэффициент b называется коэффициентом
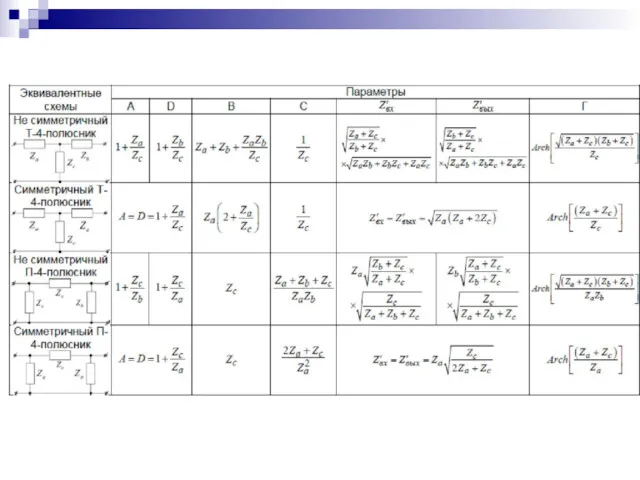
Эквивалентные схемы пассивных 4-полюсников
Простейшие схемы 4-полюсников: Г-, Т- и П-типа.
Рассмотрим
Эквивалентные схемы пассивных 4-полюсников
Простейшие схемы 4-полюсников: Г-, Т- и П-типа.
Рассмотрим
Схемы соединения 4-полюсников
Цепочная схема: выходные зажимы каждого из составляющих цепь звена
Схемы соединения 4-полюсников
Цепочная схема: выходные зажимы каждого из составляющих цепь звена
Последовательное соединение 4-полюсников
Под последовательным соединением 4-полюсников понимают соединение при котором как
Последовательное соединение 4-полюсников
Под последовательным соединением 4-полюсников понимают соединение при котором как
Параллельное соединение 4-полюсников
При параллельном соединении как входные, так и выходные зажимы
Параллельное соединение 4-полюсников
При параллельном соединении как входные, так и выходные зажимы
Последовательно-параллельное соединение 4-полюсников
Входные зажимы 4-полюсников включены последовательно, а выходные параллельно
Удобно
Последовательно-параллельное соединение 4-полюсников
Входные зажимы 4-полюсников включены последовательно, а выходные параллельно
Удобно
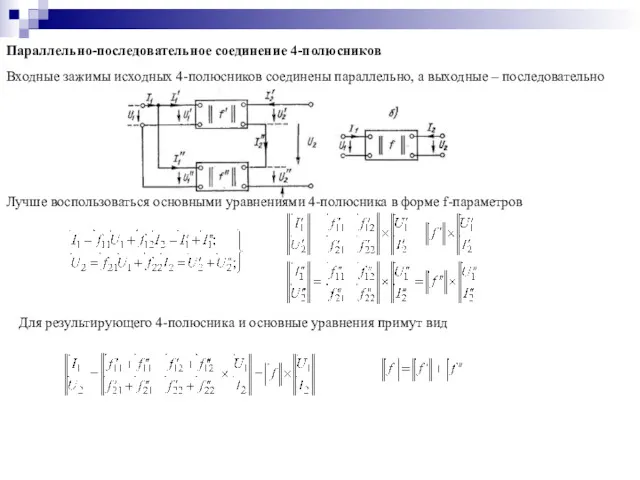
Параллельно-последовательное соединение 4-полюсников
Входные зажимы исходных 4-полюсников соединены параллельно, а выходные
Параллельно-последовательное соединение 4-полюсников
Входные зажимы исходных 4-полюсников соединены параллельно, а выходные
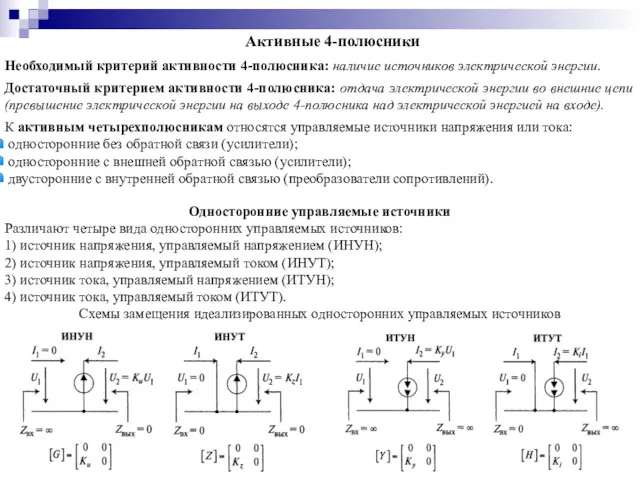
Активные 4-полюсники
Необходимый критерий активности 4-полюсника: наличие источников электрической энергии.
Достаточный критерием активности
Активные 4-полюсники
Необходимый критерий активности 4-полюсника: наличие источников электрической энергии.
Достаточный критерием активности
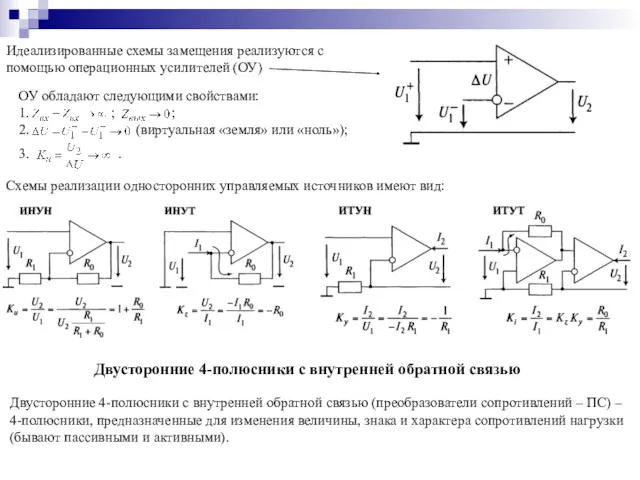
Идеализированные схемы замещения реализуются с помощью операционных усилителей (ОУ)
Схемы реализации односторонних
Идеализированные схемы замещения реализуются с помощью операционных усилителей (ОУ)
Схемы реализации односторонних
Пассивные ПС изменяют только величину и характер сопротивлений нагрузки (идеальный трансформатор,
Пассивные ПС изменяют только величину и характер сопротивлений нагрузки (идеальный трансформатор,
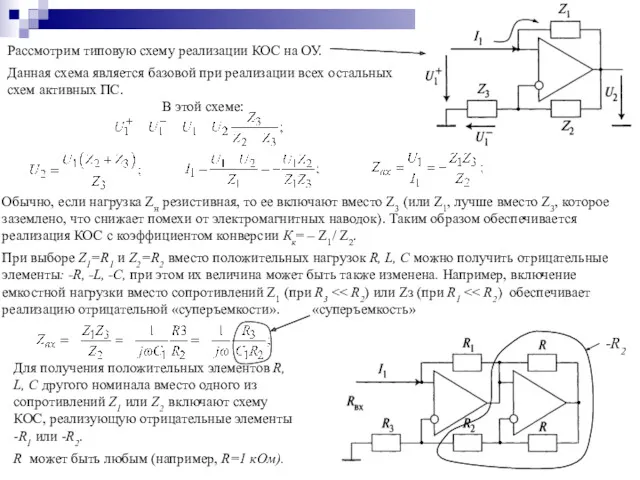
Рассмотрим типовую схему реализации КОС на ОУ.
Данная схема является базовой при
Рассмотрим типовую схему реализации КОС на ОУ.
Данная схема является базовой при
Инвертор сопротивлений
Инвертором сопротивлений (ИС) является четырехполюсник, операторное входное сопротивление которого определяется
Инвертор сопротивлений
Инвертором сопротивлений (ИС) является четырехполюсник, операторное входное сопротивление которого определяется
Обратная связь
Обратная связь (ОС) – это влияние выхода активного четырехполюсника на
Обратная связь
Обратная связь (ОС) – это влияние выхода активного четырехполюсника на
Если на вход АЛЭЦ поступает сигнал -uос (сигналы u1 и uос
Если на вход АЛЭЦ поступает сигнал -uос (сигналы u1 и uос
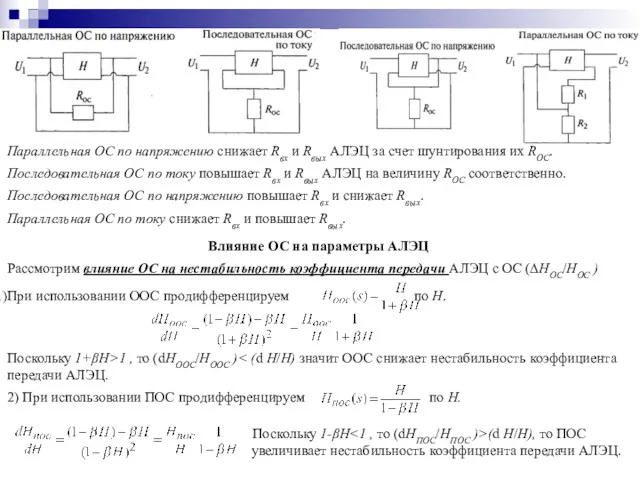
Параллельная ОС по напряжению снижает Rвх и Rвых АЛЭЦ за счет
Параллельная ОС по напряжению снижает Rвх и Rвых АЛЭЦ за счет
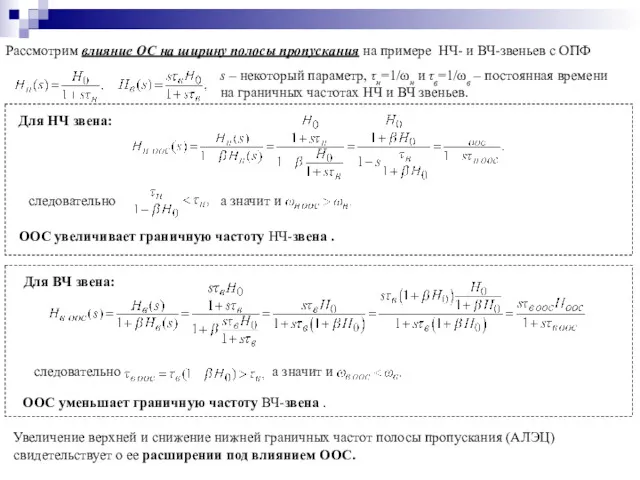
Рассмотрим влияние ОС на ширину полосы пропускания на примере НЧ- и
Рассмотрим влияние ОС на ширину полосы пропускания на примере НЧ- и
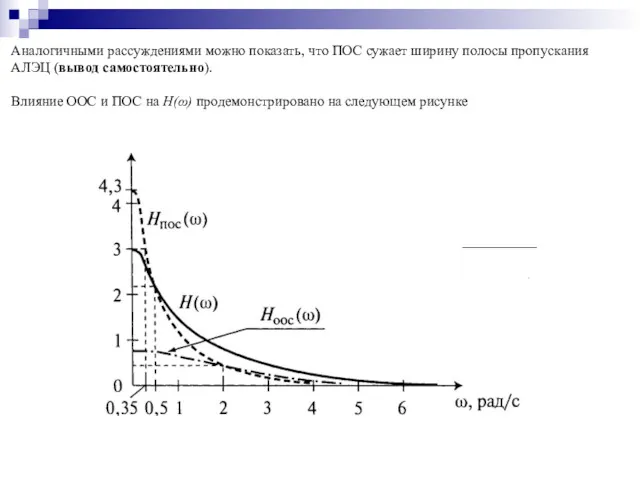
Аналогичными рассуждениями можно показать, что ПОС сужает ширину полосы пропускания АЛЭЦ
Аналогичными рассуждениями можно показать, что ПОС сужает ширину полосы пропускания АЛЭЦ
Устойчивость активной линейной цепи с внешней обратной связью
Устойчивость активной электрической цепи
Устойчивость активной линейной цепи с внешней обратной связью
Устойчивость активной электрической цепи
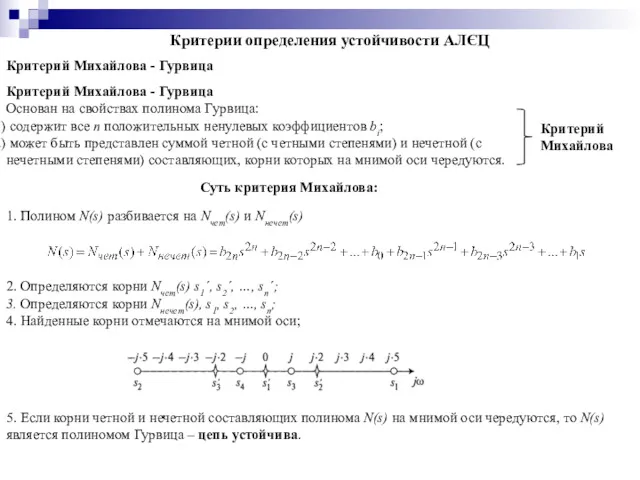
Критерии определения устойчивости АЛЄЦ
Критерий Михайлова - Гурвица
Критерий Михайлова - Гурвица
Основан на
Критерии определения устойчивости АЛЄЦ
Критерий Михайлова - Гурвица
Критерий Михайлова - Гурвица
Основан на
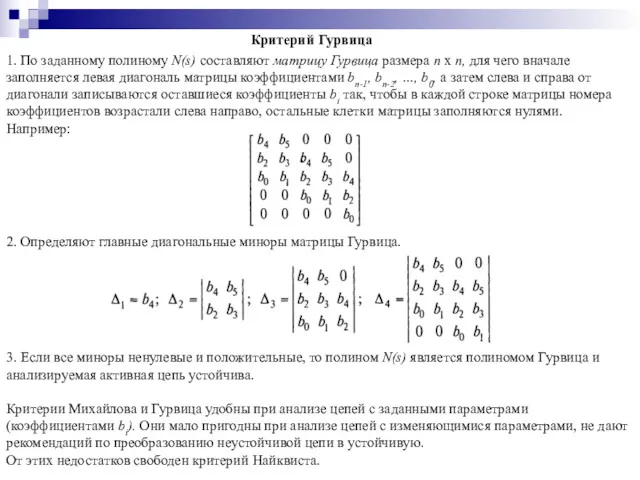
Критерий Гурвица
1. По заданному полиному N(s) составляют матрицу Гурвица размера п х п,
Критерий Гурвица
1. По заданному полиному N(s) составляют матрицу Гурвица размера п х п,
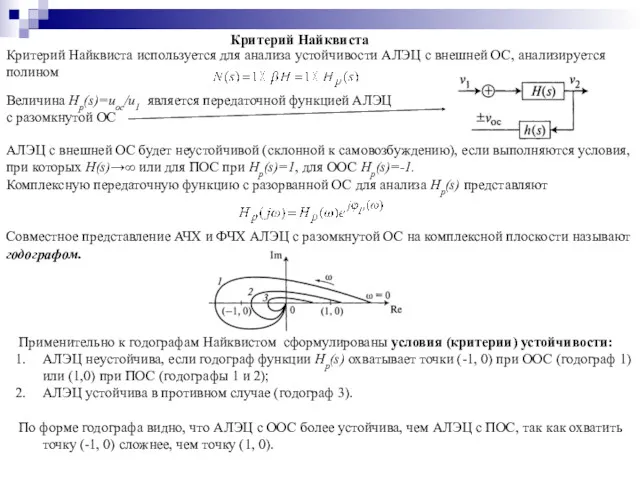
Критерий Найквиста
Критерий Найквиста используется для анализа устойчивости АЛЭЦ с внешней ОС,
Критерий Найквиста
Критерий Найквиста используется для анализа устойчивости АЛЭЦ с внешней ОС,
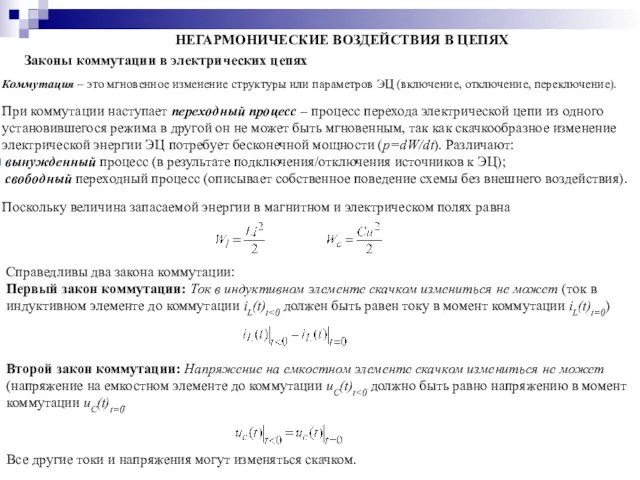
НЕГАРМОНИЧЕСКИЕ ВОЗДЕЙСТВИЯ В ЦЕПЯХ
Законы коммутации в электрических цепях
Коммутация – это мгновенное
НЕГАРМОНИЧЕСКИЕ ВОЗДЕЙСТВИЯ В ЦЕПЯХ
Законы коммутации в электрических цепях
Коммутация – это мгновенное
При анализе переходных процессов исходный установившийся режим называют начальными условиями. Они
При анализе переходных процессов исходный установившийся режим называют начальными условиями. Они
Алгоритм классического метода анализа
Рассмотрим пример последовательной цепи второго порядка. В
Алгоритм классического метода анализа
Рассмотрим пример последовательной цепи второго порядка. В
4. Определение свободного решения при п=2 (для данного примера):
где s1
4. Определение свободного решения при п=2 (для данного примера):
где s1
Операторный метод анализа переходных процессов
С увеличением числа реактивных элементов возрастает
Операторный метод анализа переходных процессов
С увеличением числа реактивных элементов возрастает
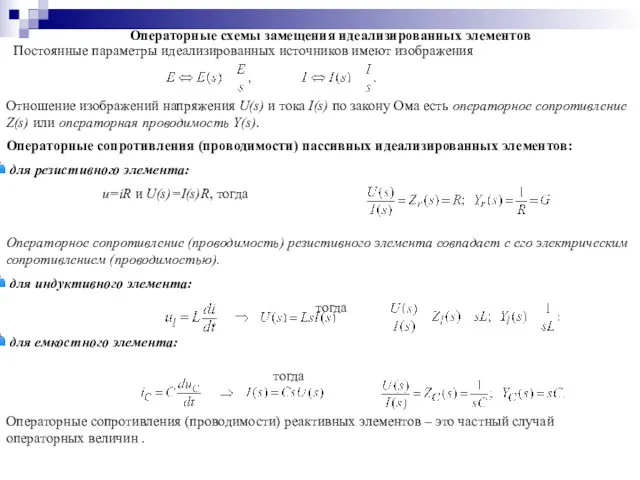
Операторные схемы замещения идеализированных элементов
Постоянные параметры идеализированных источников имеют изображения
Отношение
Операторные схемы замещения идеализированных элементов
Постоянные параметры идеализированных источников имеют изображения
Отношение
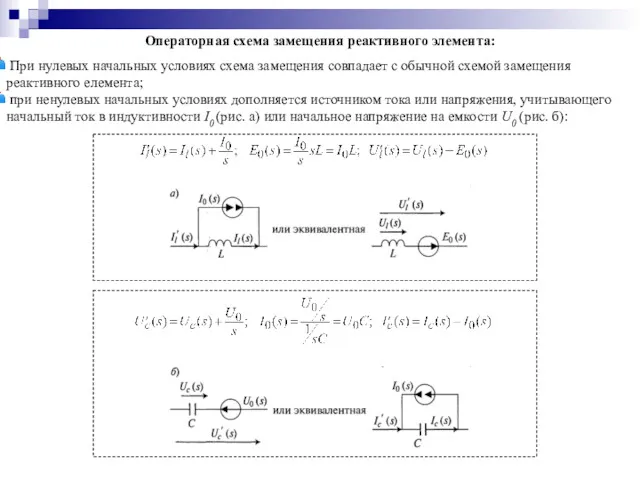
Операторная схема замещения реактивного элемента:
При нулевых начальных условиях схема
Операторная схема замещения реактивного элемента:
При нулевых начальных условиях схема
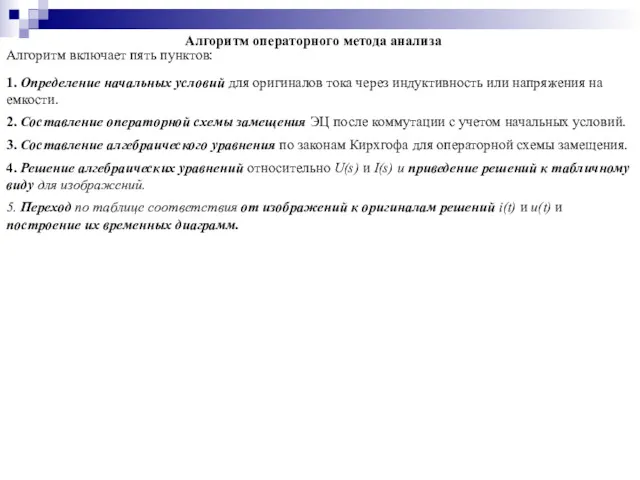
Алгоритм операторного метода анализа
Алгоритм включает пять пунктов:
1. Определение начальных условий
Алгоритм операторного метода анализа
Алгоритм включает пять пунктов:
1. Определение начальных условий
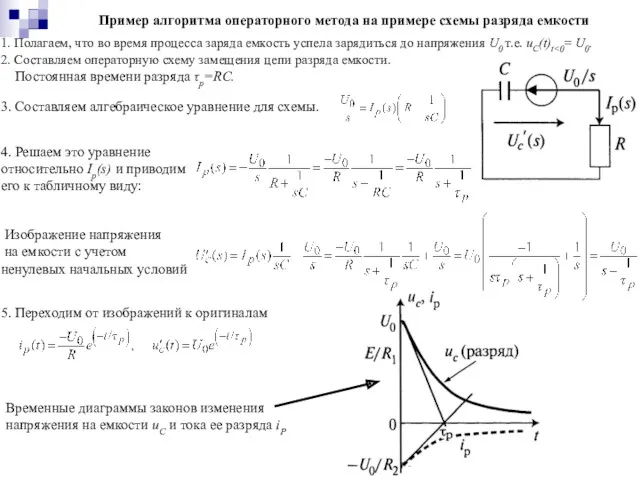
Пример алгоритма операторного метода на примере схемы разряда емкости
1. Полагаем,
Пример алгоритма операторного метода на примере схемы разряда емкости
1. Полагаем,
Временные характеристики электрических цепей.
Единичные воздействия и отклики на них
При
Временные характеристики электрических цепей.
Единичные воздействия и отклики на них
При
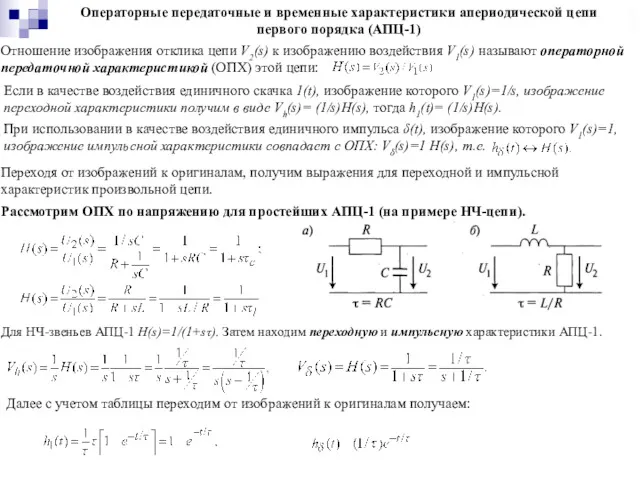
Операторные передаточные и временные характеристики апериодической цепи первого порядка (АПЦ-1)
Отношение
Операторные передаточные и временные характеристики апериодической цепи первого порядка (АПЦ-1)
Отношение
Временной метод анализа переходных процессов
Анализ переходных процессов может осуществляться при
Временной метод анализа переходных процессов
Анализ переходных процессов может осуществляться при
Пример
Пусть экспоненциальный сигнал
подается на вход звена ВЧ-1 с переходной
Пример
Пусть экспоненциальный сигнал
подается на вход звена ВЧ-1 с переходной
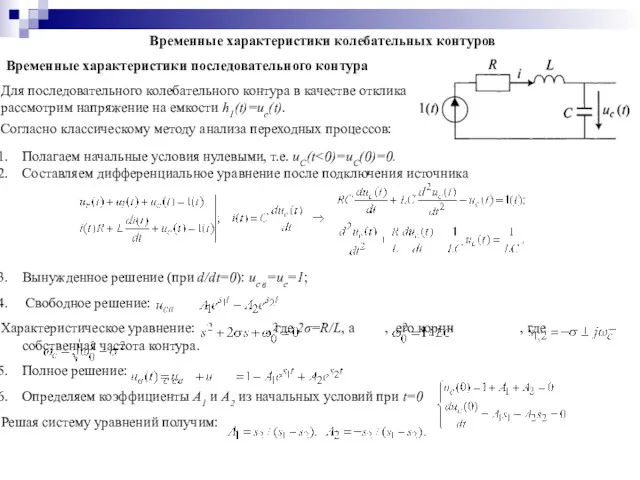
Временные характеристики колебательных контуров
Временные характеристики последовательного контура
Для последовательного колебательного
Временные характеристики колебательных контуров
Временные характеристики последовательного контура
Для последовательного колебательного
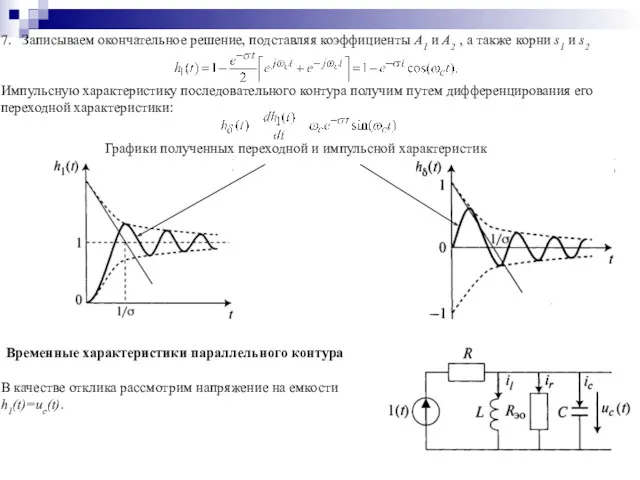
7. Записываем окончательное решение, подставляя коэффициенты А1 и А2 , а
7. Записываем окончательное решение, подставляя коэффициенты А1 и А2 , а
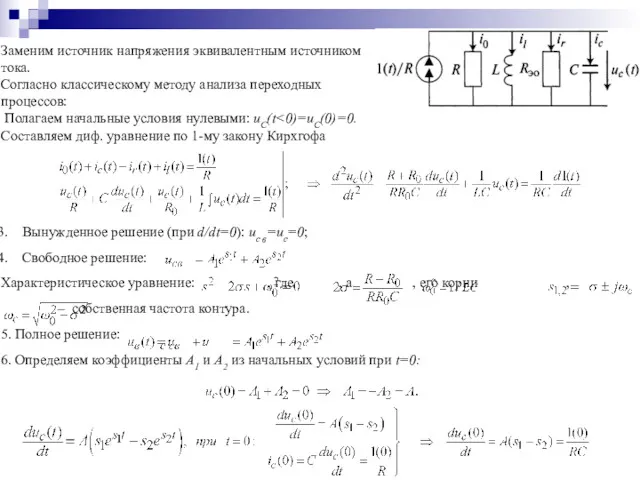
Заменим источник напряжения эквивалентным источником тока.
Согласно классическому методу анализа переходных процессов:
Заменим источник напряжения эквивалентным источником тока.
Согласно классическому методу анализа переходных процессов:
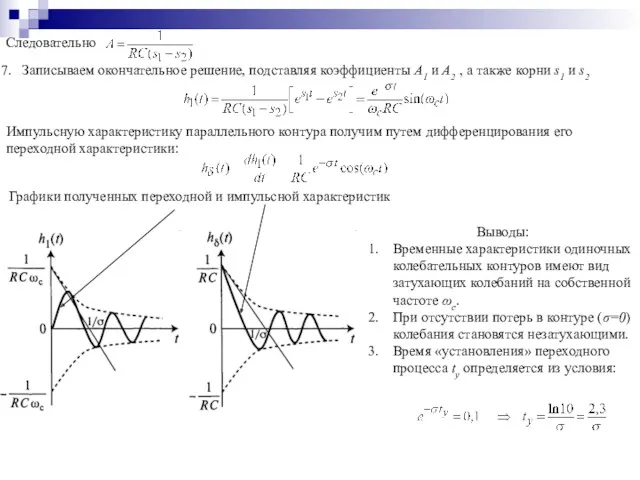
Следовательно
7. Записываем окончательное решение, подставляя коэффициенты А1 и А2 ,
Следовательно
7. Записываем окончательное решение, подставляя коэффициенты А1 и А2 ,
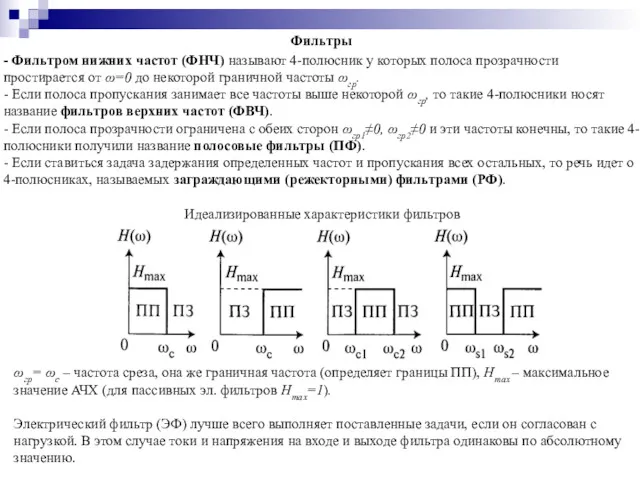
Фильтры
- Фильтром нижних частот (ФНЧ) называют 4-полюсник у которых полоса
Фильтры
- Фильтром нижних частот (ФНЧ) называют 4-полюсник у которых полоса
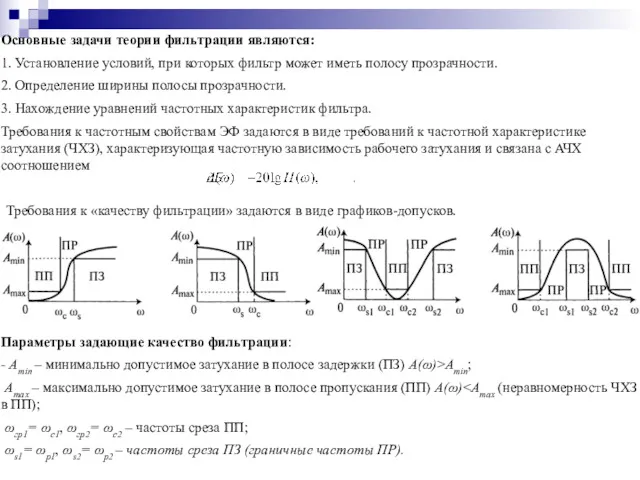
Основные задачи теории фильтрации являются:
1. Установление условий, при которых фильтр может
Основные задачи теории фильтрации являются:
1. Установление условий, при которых фильтр может
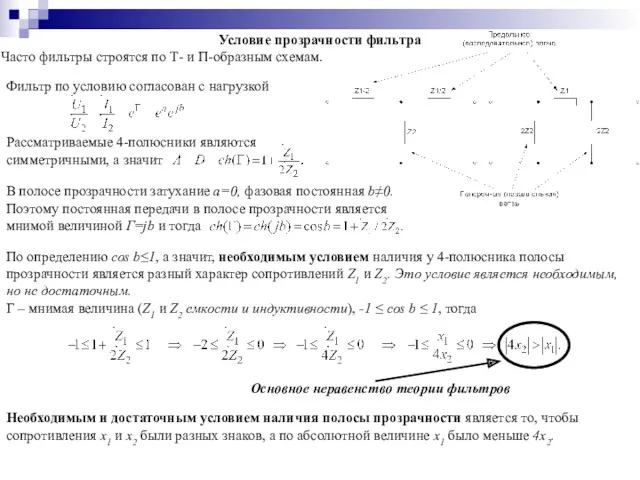
Условие прозрачности фильтра
Часто фильтры строятся по Т- и П-образным схемам.
Фильтр
Условие прозрачности фильтра
Часто фильтры строятся по Т- и П-образным схемам.
Фильтр
Граничные частоты полосы прозрачности
Исходя из основного неравенства теории фильтров можно определить
Граничные частоты полосы прозрачности
Исходя из основного неравенства теории фильтров можно определить
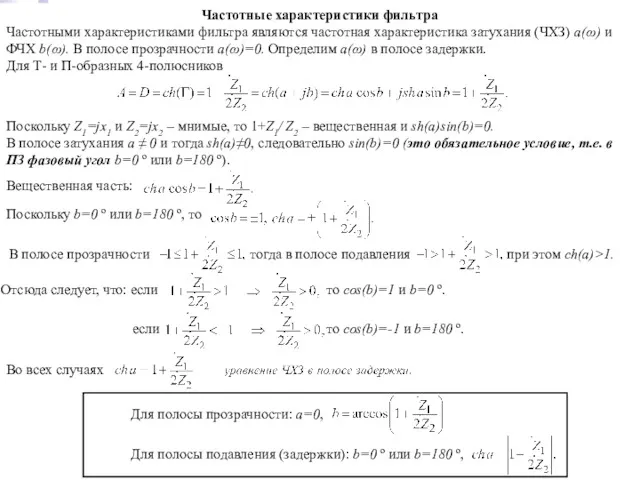
Частотные характеристики фильтра
Частотными характеристиками фильтра являются частотная характеристика затухания (ЧХЗ) a(ω)
Частотные характеристики фильтра
Частотными характеристиками фильтра являются частотная характеристика затухания (ЧХЗ) a(ω)
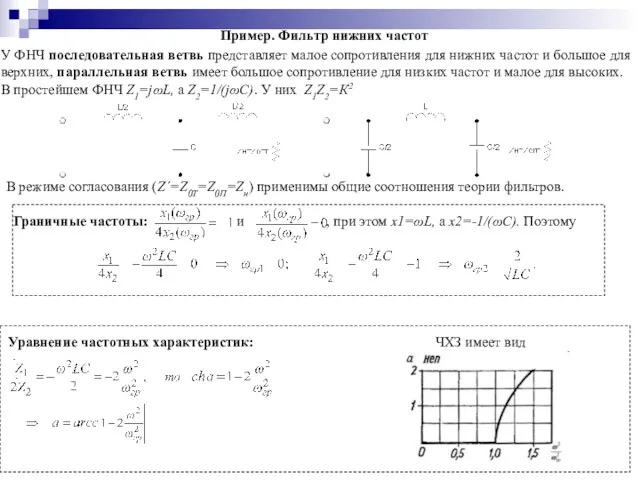
Пример. Фильтр нижних частот
У ФНЧ последовательная ветвь представляет малое сопротивления
Пример. Фильтр нижних частот
У ФНЧ последовательная ветвь представляет малое сопротивления
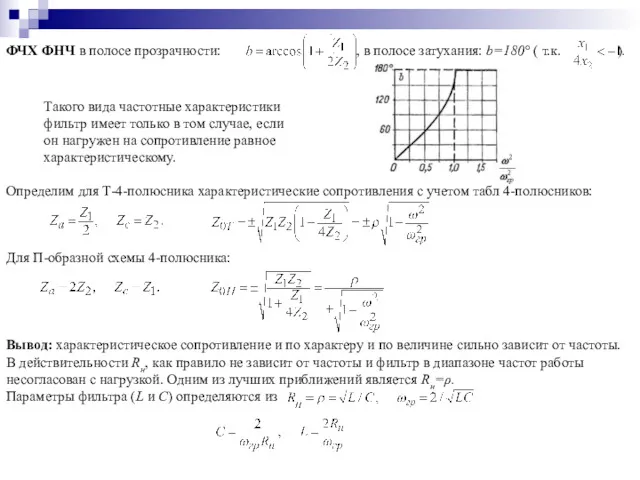
ФЧХ ФНЧ в полосе прозрачности: , в полосе затухания: b=180° (
ФЧХ ФНЧ в полосе прозрачности: , в полосе затухания: b=180° (
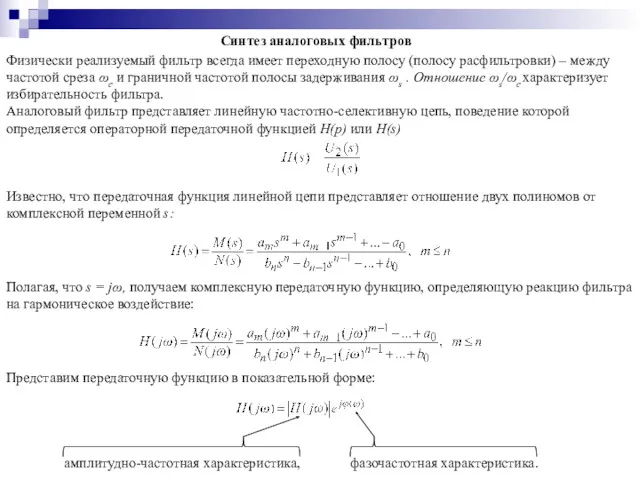
Синтез аналоговых фильтров
Физически реализуемый фильтр всегда имеет переходную полосу (полосу расфильтровки)
Синтез аналоговых фильтров
Физически реализуемый фильтр всегда имеет переходную полосу (полосу расфильтровки)
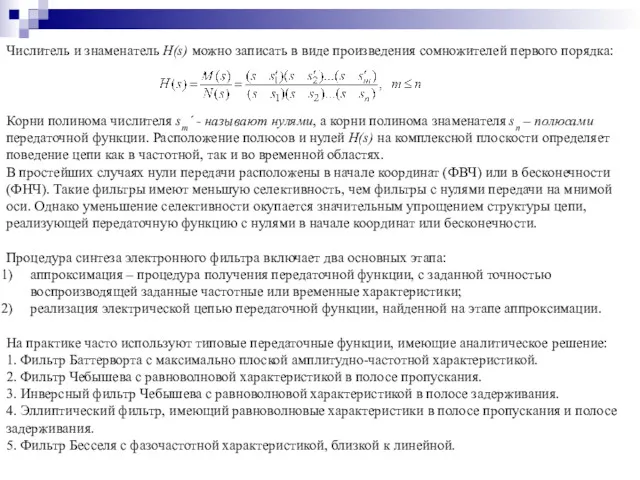
Числитель и знаменатель H(s) можно записать в виде произведения сомножителей первого
Числитель и знаменатель H(s) можно записать в виде произведения сомножителей первого
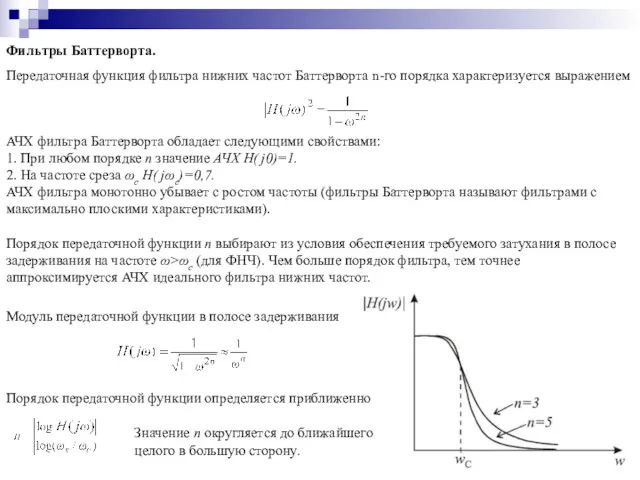
Фильтры Баттерворта.
Передаточная функция фильтра нижних частот Баттерворта n-го порядка характеризуется выражением
АЧХ
Фильтры Баттерворта.
Передаточная функция фильтра нижних частот Баттерворта n-го порядка характеризуется выражением
АЧХ
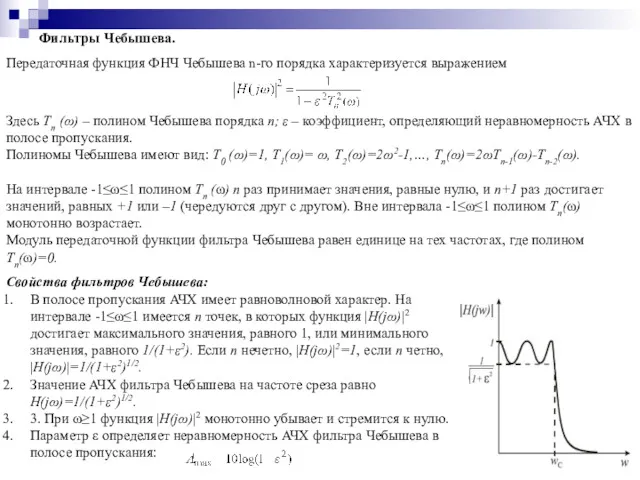
Фильтры Чебышева.
Передаточная функция ФНЧ Чебышева n-го порядка характеризуется выражением
Здесь Tn (ω)
Фильтры Чебышева.
Передаточная функция ФНЧ Чебышева n-го порядка характеризуется выражением
Здесь Tn (ω)
Пассивные LC-фильтры
Пассивный фильтр, реализующий характеристики Баттерворта или Чебышева, представляет лестничную LC-цепь,
Пассивные LC-фильтры
Пассивный фильтр, реализующий характеристики Баттерворта или Чебышева, представляет лестничную LC-цепь,
Порядок расчета полиномиальных LC-фильтров табличным методом
Определяется нормированная граничная частота Ωs ПЗ
Порядок расчета полиномиальных LC-фильтров табличным методом
Определяется нормированная граничная частота Ωs ПЗ
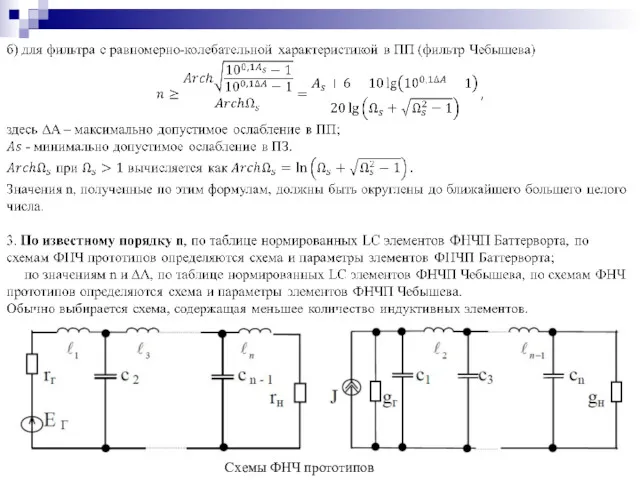
Схемы ФНЧ прототипов
Схемы ФНЧ прототипов
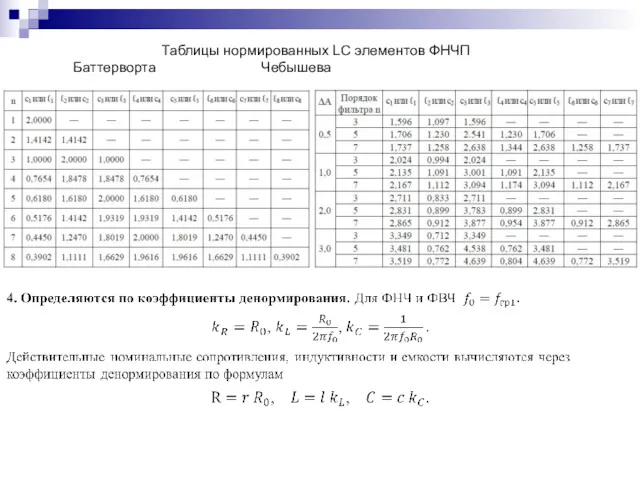
Таблицы нормированных LC элементов ФНЧП
Баттерворта Чебышева
Таблицы нормированных LC элементов ФНЧП
Баттерворта Чебышева
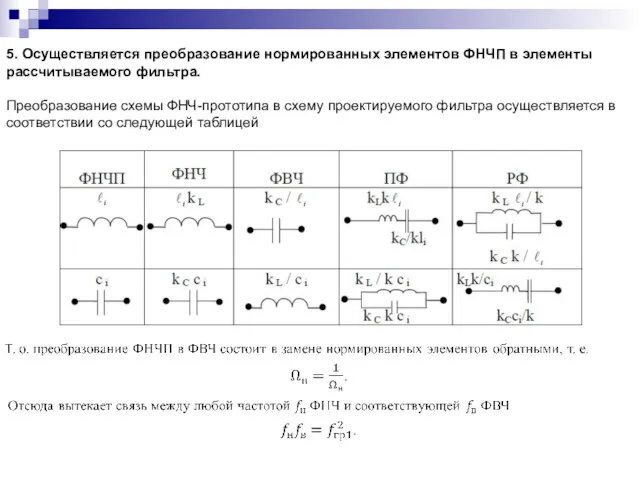
5. Осуществляется преобразование нормированных элементов ФНЧП в элементы рассчитываемого фильтра.
Преобразование схемы
5. Осуществляется преобразование нормированных элементов ФНЧП в элементы рассчитываемого фильтра.
Преобразование схемы
Нелинейные электрические цепи
Нелинейные элементы цепи – это такие цепи, которые содержат
Нелинейные электрические цепи
Нелинейные элементы цепи – это такие цепи, которые содержат
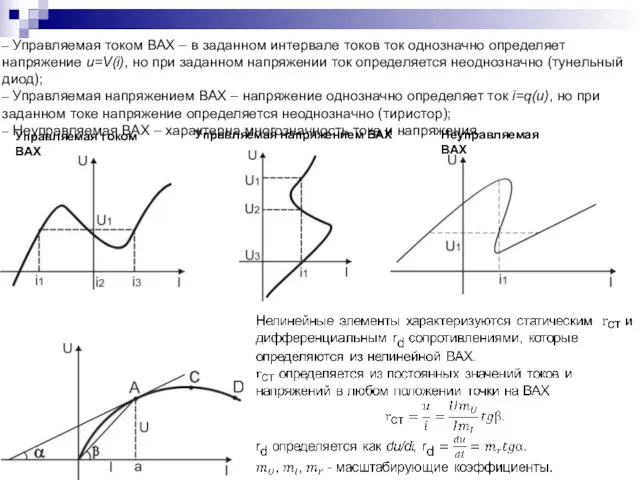
– Управляемая током ВАХ – в заданном интервале токов ток однозначно
– Управляемая током ВАХ – в заданном интервале токов ток однозначно
Методы расчета нелинейных электрических цепей
Электрическое состояние нелинейных цепей описывается на основании
Методы расчета нелинейных электрических цепей
Электрическое состояние нелинейных цепей описывается на основании
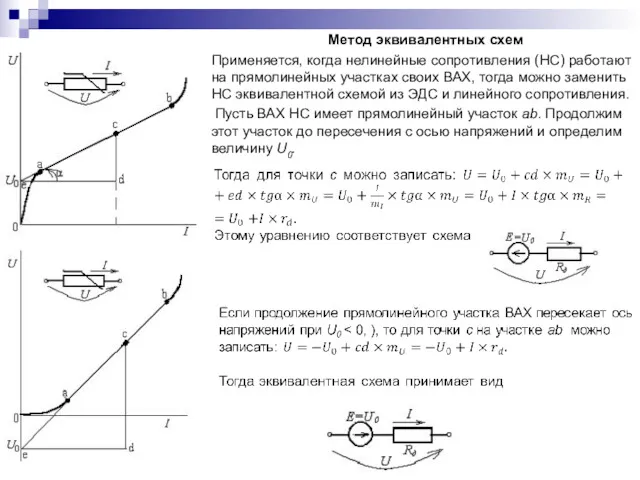
Метод эквивалентных схем
Применяется, когда нелинейные сопротивления (НС) работают на прямолинейных участках
Метод эквивалентных схем
Применяется, когда нелинейные сопротивления (НС) работают на прямолинейных участках
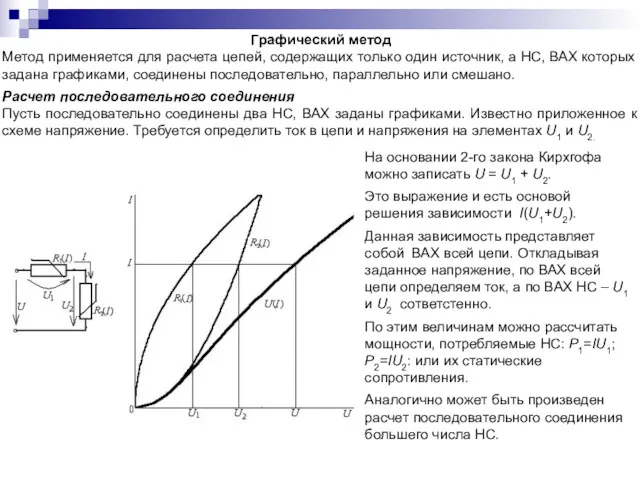
Графический метод
Метод применяется для расчета цепей, содержащих только один источник, а
Графический метод
Метод применяется для расчета цепей, содержащих только один источник, а
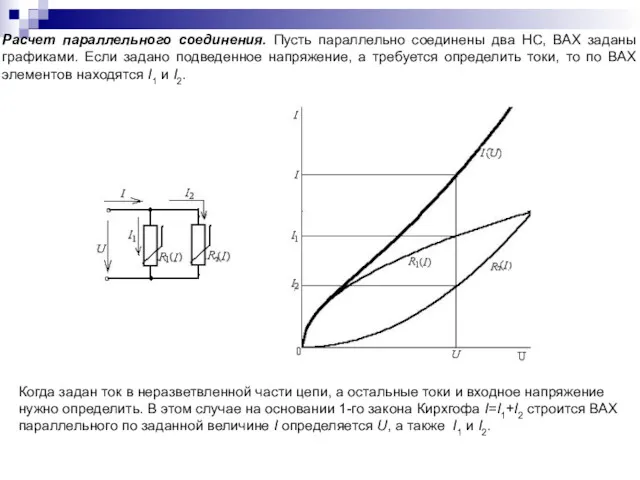
Расчет параллельного соединения. Пусть параллельно соединены два НС, ВАХ заданы графиками.
Расчет параллельного соединения. Пусть параллельно соединены два НС, ВАХ заданы графиками.
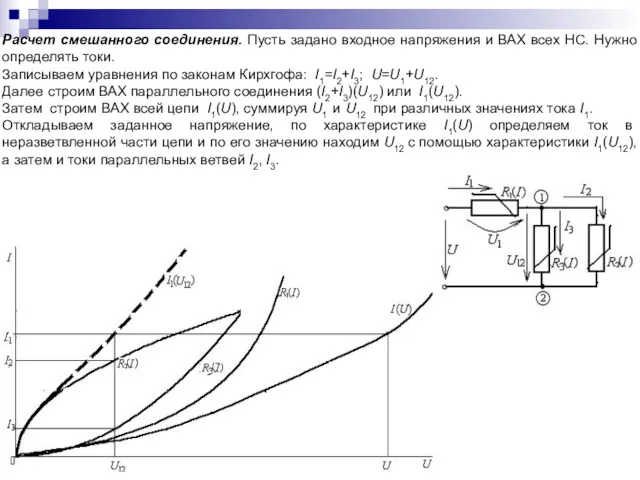
Расчет смешанного соединения. Пусть задано входное напряжения и ВАХ всех НС.
Расчет смешанного соединения. Пусть задано входное напряжения и ВАХ всех НС.
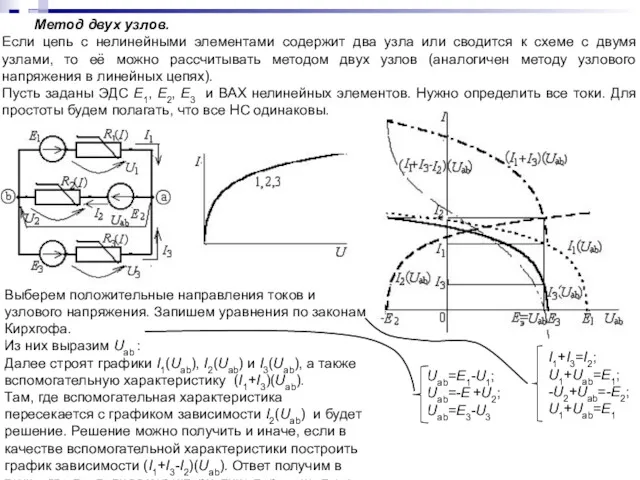
Метод двух узлов.
Если цепь с нелинейными элементами содержит два узла
Метод двух узлов.
Если цепь с нелинейными элементами содержит два узла
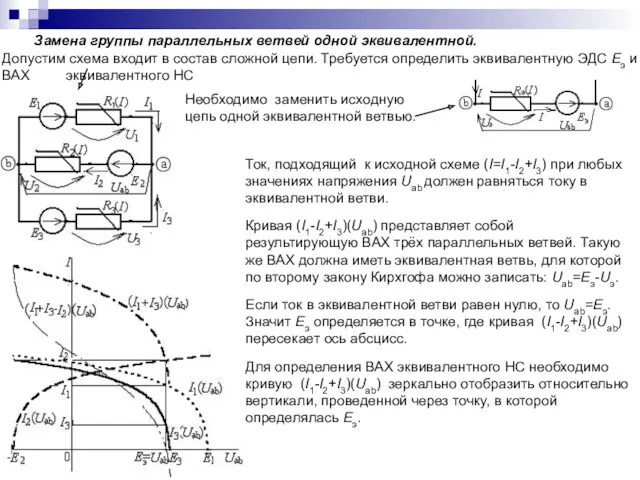
Замена группы параллельных ветвей одной эквивалентной.
Допустим схема входит в состав
Замена группы параллельных ветвей одной эквивалентной.
Допустим схема входит в состав
Нелинейные цепи переменного тока
С помощью НС с несимметричной вольтамперной характеристикой в
Нелинейные цепи переменного тока
С помощью НС с несимметричной вольтамперной характеристикой в
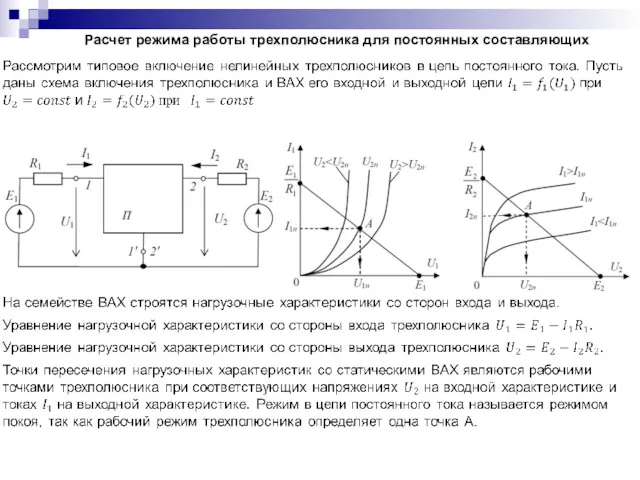
Расчет режима работы трехполюсника для постоянных составляющих
Расчет режима работы трехполюсника для постоянных составляющих
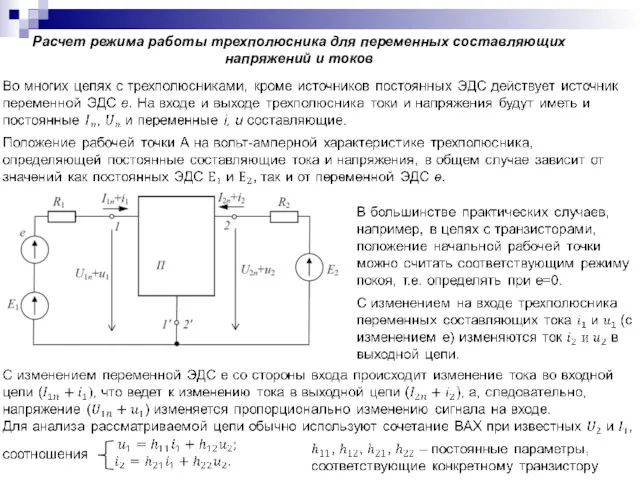
Расчет режима работы трехполюсника для переменных составляющих напряжений и токов
Расчет режима работы трехполюсника для переменных составляющих напряжений и токов
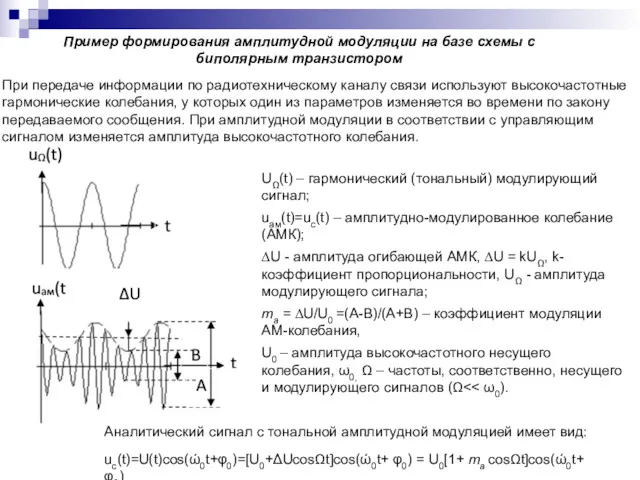
Пример формирования амплитудной модуляции на базе схемы с биполярным транзистором
При передаче
Пример формирования амплитудной модуляции на базе схемы с биполярным транзистором
При передаче
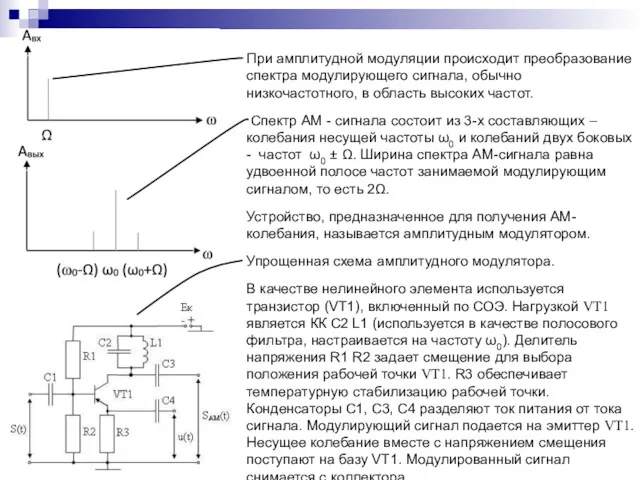
При амплитудной модуляции происходит преобразование спектра модулирующего сигнала, обычно низкочастотного, в
При амплитудной модуляции происходит преобразование спектра модулирующего сигнала, обычно низкочастотного, в
Пример амплитудного детектирования на базе простейшей схемы с диодом
Детектирование – процесс,
Пример амплитудного детектирования на базе простейшей схемы с диодом
Детектирование – процесс,
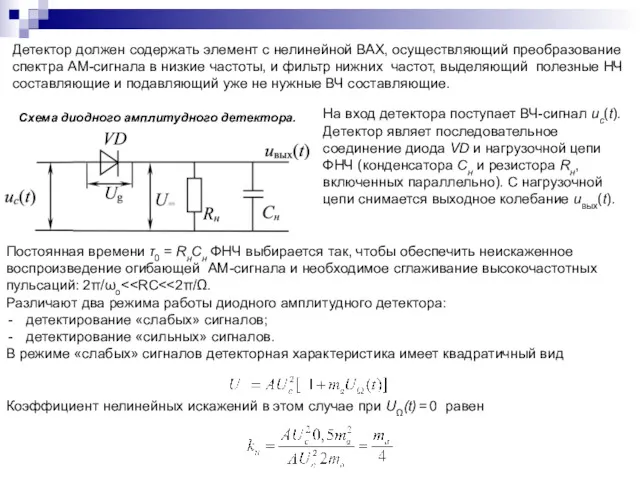
На вход детектора поступает ВЧ-сигнал uc(t). Детектор являет последовательное соединение диода
На вход детектора поступает ВЧ-сигнал uc(t). Детектор являет последовательное соединение диода
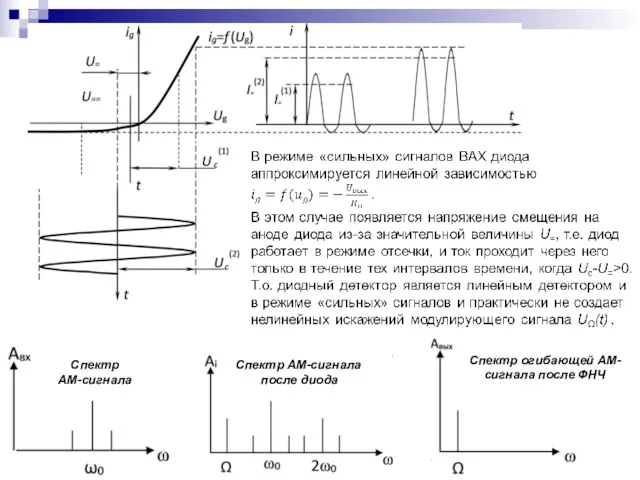
Спектр
АМ-сигнала
Спектр АМ-сигнала
после диода
Спектр огибающей АМ-сигнала после ФНЧ
Спектр
АМ-сигнала
Спектр АМ-сигнала
после диода
Спектр огибающей АМ-сигнала после ФНЧ
Электрические цепи с распределенными параметрами
Уравнения однородной линии передачи
Электрические цепи с распределенными параметрами
Уравнения однородной линии передачи
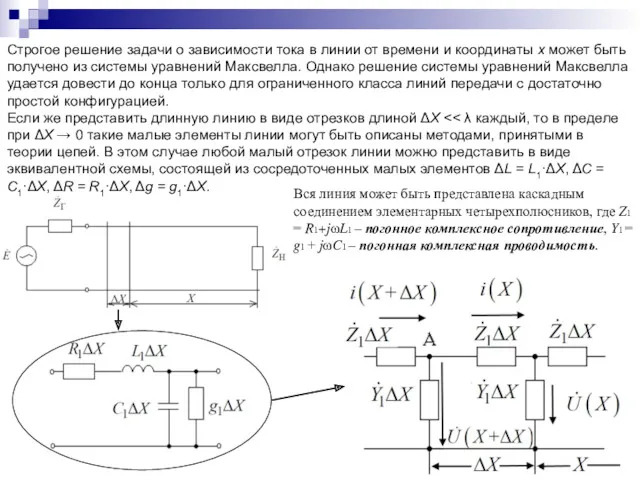
Строгое решение задачи о зависимости тока в линии от времени и
Строгое решение задачи о зависимости тока в линии от времени и
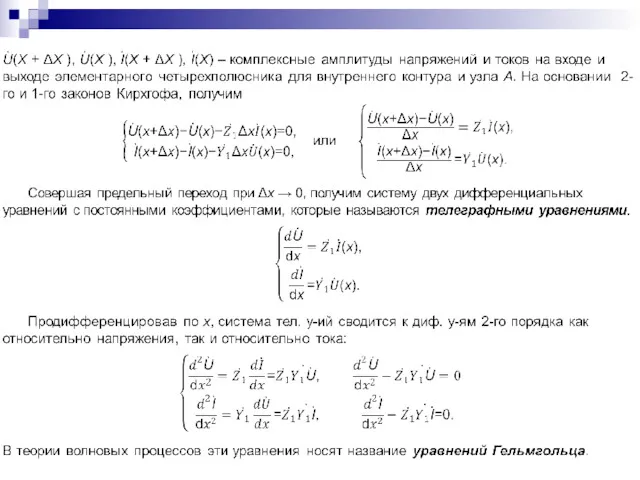
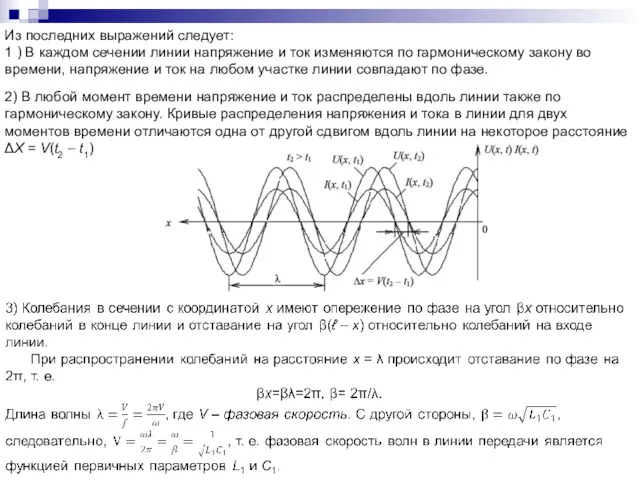
Из последних выражений следует:
1 ) В каждом сечении линии напряжение и
Из последних выражений следует:
1 ) В каждом сечении линии напряжение и
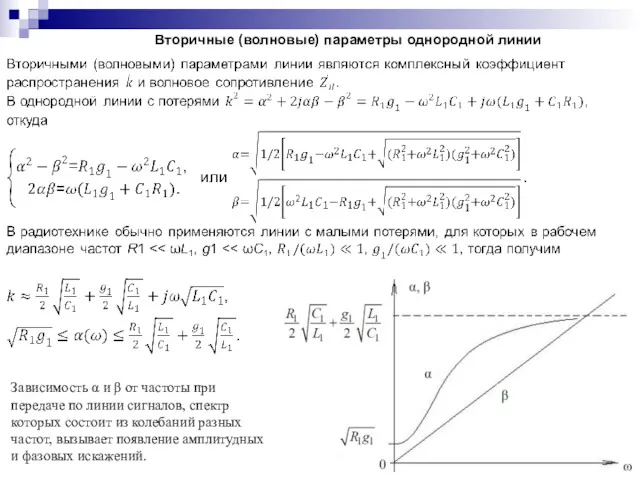
Вторичные (волновые) параметры однородной линии
Зависимость α и β от частоты при
Вторичные (волновые) параметры однородной линии
Зависимость α и β от частоты при
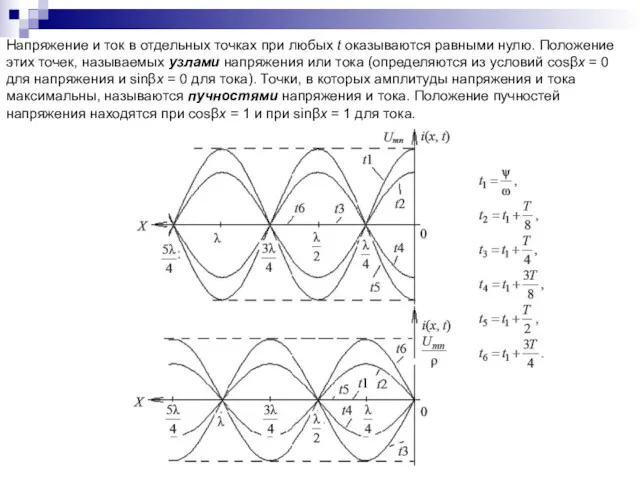
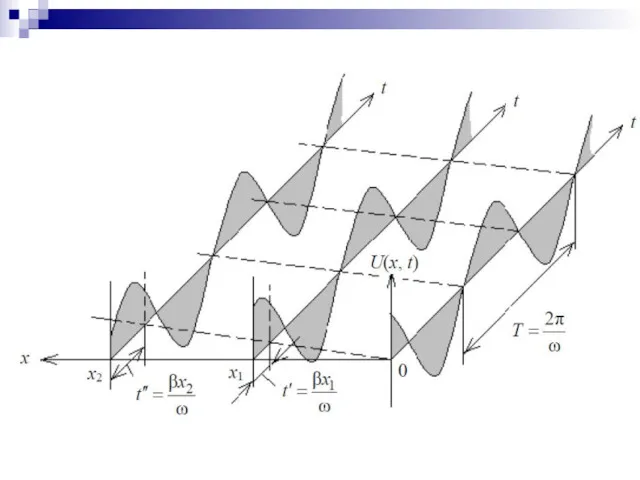
Напряжение и ток в отдельных точках при любых t оказываются равными
Напряжение и ток в отдельных точках при любых t оказываются равными
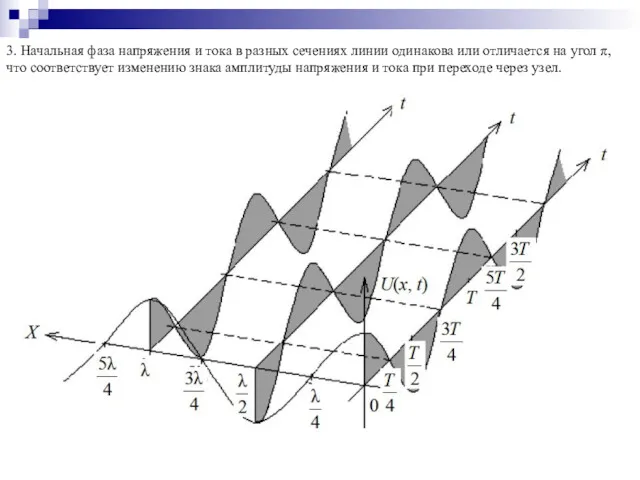
3. Начальная фаза напряжения и тока в разных сечениях линии одинакова
3. Начальная фаза напряжения и тока в разных сечениях линии одинакова
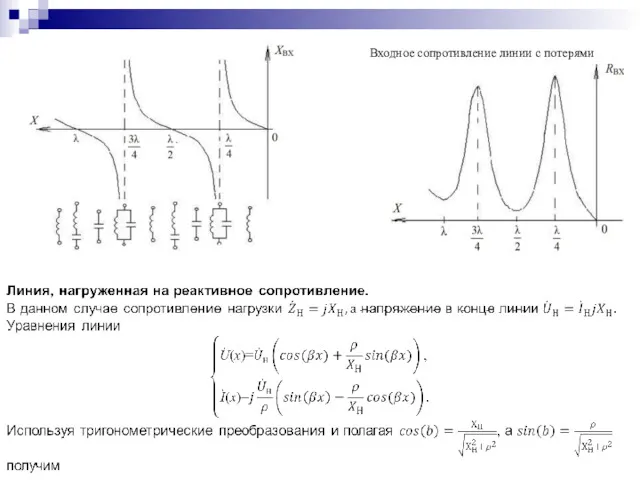
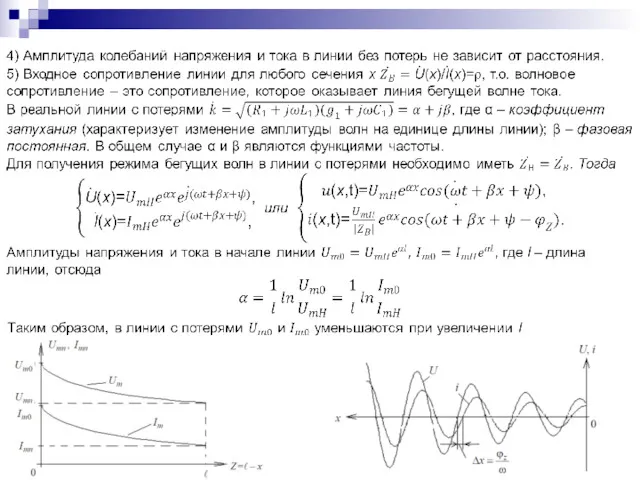
Входное сопротивление линии с потерями
Входное сопротивление линии с потерями
 Загадки непростые, а с подсказками
Загадки непростые, а с подсказками Электрическая цепь и ее составные части
Электрическая цепь и ее составные части Система сходящихся сил. Момент силы. Лекция 2
Система сходящихся сил. Момент силы. Лекция 2 Умники и умницы
Умники и умницы Закон сохранения и превращения механической энергии
Закон сохранения и превращения механической энергии Кількість теплоти, що виділяється в провіднику зі струмом
Кількість теплоти, що виділяється в провіднику зі струмом Cummins Engine Company LTD
Cummins Engine Company LTD Гідростатичний тиск
Гідростатичний тиск Физические основы механики. Лекция 1.1
Физические основы механики. Лекция 1.1 Технический проекты Леонардо да Винчи
Технический проекты Леонардо да Винчи Взаимодействие ионизирующего излучения с веществом
Взаимодействие ионизирующего излучения с веществом Испарение и конденсация. Кипение жидкости
Испарение и конденсация. Кипение жидкости Решение задач по теме Основы термодинамики
Решение задач по теме Основы термодинамики Основы квантовой физики. Лазеры
Основы квантовой физики. Лазеры Методы повышения эффективности усвоения понятий при изучении темы динамика
Методы повышения эффективности усвоения понятий при изучении темы динамика Основные понятия в теории механизмов и машин. ТММ Лекция 1
Основные понятия в теории механизмов и машин. ТММ Лекция 1 Методы синтеза САУ
Методы синтеза САУ Шпоночные и шлицевые соединения
Шпоночные и шлицевые соединения Цель и задачи курса Техническая механика. Расчеты на прочность. Расчеты на жесткость
Цель и задачи курса Техническая механика. Расчеты на прочность. Расчеты на жесткость Стальные и растительные тросы
Стальные и растительные тросы Простые механизмы.4 класс
Простые механизмы.4 класс Синергетика – новое междисциплинарное научное направление
Синергетика – новое междисциплинарное научное направление Дизель 10 Д 100
Дизель 10 Д 100 Устройство, принцип работы системы питания карбюраторного двигателя
Устройство, принцип работы системы питания карбюраторного двигателя Системы ПТУ 2
Системы ПТУ 2 Связанные волны в нелинейной среде
Связанные волны в нелинейной среде Выталкивающая сила
Выталкивающая сила Измерение влажности
Измерение влажности