- Основы электропривода

Содержание
- 3. Структурная схема электропривода Устройства: 1 – управляющее; 2 – преобразовательное; 3 – электродвигательное (ЭДУ); 4 -
- 4. С помощью управляющего устройства 1 механическая энергия РМ целенаправленно регулируется. В качестве такого устройства используются от
- 5. 1) количеству и характеру связи исполнительных, рабочих органов: – индивидуальный ЭП (рабочий исполнительный орган приводится одним
- 6. Механические характеристики производственных механизмов определяют машину как нагрузку и показывают, как изменяется частота их вращения от
- 7. . 3. Нелинейновозрастающая – х = 2. Мс = М0 + (Мс – М0)(n2 /n2ном); М
- 8. . Электродвигатель, механическая передача и рабочая машина механически соединены между собой и образуют совместно движующуюся систему.
- 9. Из уравнения основного движения электропривода определяем временя переходного процесса. Мдв = Мс + Мдин ; Откуда
- 10. При пуске, когда n1 =0 где nном – номинальная частота вращения двигателя по окончании разгона; Мп
- 11. В процессе преобразования электрической энергии в механическую в двигателе происходит потеря части энергии, которая выделяется в
- 12. Это линейное дифференциальное уравнение первого порядка с постоянной правой частью, которая в данном случае определяет установившееся
- 13. 0 “уст уст ‘уст Конечное значение τ = τуст не зависят от τнач, а только от
- 14. Номинальные режимы работы электрооборудования обусловлены допустимым температурным режимом изоляции. Изоляционные материалы по теплостойкости разделяются на семь
- 15. 4. Условия эксплуатации При выборе типа ЭД к механизму необходимо учитывать: 5. Вид сопряжения ЭД с
- 16. От правильного выбора ЭД по мощности зависят надежность его работы и КПД. Когда нагрузка ЭД существенно
- 17. Режим работы, на который рассчитан ЭД, указывается в паспорте и на щитке ЭД Продолжительный режим работы
- 18. Одним из основных критериев выбора ЭД по мощности является температура обмоток Для электропривода, работающего в циклическом
- 19. Выбор мощности приводного ЭД при неизменной нагрузке на валу ЭД Выбирают ЭД чтобы его номинальная мощность
- 20. Пример 1. Определить мощность ЭД для привода водяного насоса с постоянным напором 30м Напор насоса: 30м
- 21. Рассчитывают Pэ Выбирают ЭД с режимом работы S1, чтобы его мощность превышала эквивалентную Пример. Определить мощность
- 22. Выбор мощности приводного ЭД при повторно-кратковременной нагрузке на валу ЭД Рассчитывают ПВ. Если ПВ>60%, то рассчитывают
- 23. Выбор мощности приводного ЭД при кратковременной нагрузке на валу ЭД Выбирают ЭД с кратковременным режимом работы
- 24. 1. Максимальный (критический Мкр) момент ЭД Мmax должен быть несколько больше максимально возможного тормозного момента механизма
- 26. Скачать презентацию


Структурная схема электропривода
Устройства: 1 – управляющее; 2 – преобразовательное;
3
Структурная схема электропривода
Устройства: 1 – управляющее; 2 – преобразовательное;
3

С помощью управляющего устройства 1 механическая энергия РМ целенаправленно регулируется.
С помощью управляющего устройства 1 механическая энергия РМ целенаправленно регулируется.

1) количеству и характеру связи исполнительных, рабочих органов:
– индивидуальный ЭП (рабочий исполнительный
1) количеству и характеру связи исполнительных, рабочих органов:
– индивидуальный ЭП (рабочий исполнительный

Механические характеристики производственных механизмов определяют машину
как нагрузку и показывают,
Механические характеристики производственных механизмов определяют машину
как нагрузку и показывают,

.
3. Нелинейновозрастающая – х = 2.
Мс = М0 + (Мс
.
3. Нелинейновозрастающая – х = 2.
Мс = М0 + (Мс

.
Электродвигатель, механическая передача и рабочая машина механически соединены между собой
.
Электродвигатель, механическая передача и рабочая машина механически соединены между собой

Из уравнения основного движения электропривода определяем
временя переходного процесса.
Мдв
Из уравнения основного движения электропривода определяем
временя переходного процесса.
Мдв

При пуске, когда n1 =0
где nном – номинальная частота
При пуске, когда n1 =0
где nном – номинальная частота

В процессе преобразования электрической энергии в механическую в двигателе происходит потеря
В процессе преобразования электрической энергии в механическую в двигателе происходит потеря

Это линейное дифференциальное уравнение первого порядка с постоянной
правой частью, которая
Это линейное дифференциальное уравнение первого порядка с постоянной
правой частью, которая

0
“уст
уст
‘уст
Конечное значение τ = τуст не зависят от τнач, а только
0
“уст
уст
‘уст
Конечное значение τ = τуст не зависят от τнач, а только

Номинальные режимы работы электрооборудования обусловлены допустимым температурным
режимом изоляции.
Изоляционные материалы по
Номинальные режимы работы электрооборудования обусловлены допустимым температурным
режимом изоляции.
Изоляционные материалы по

4. Условия эксплуатации
При выборе типа ЭД к механизму необходимо учитывать:
5. Вид
4. Условия эксплуатации
При выборе типа ЭД к механизму необходимо учитывать:
5. Вид

От правильного выбора ЭД по мощности зависят надежность его работы и
От правильного выбора ЭД по мощности зависят надежность его работы и

Режим работы, на который рассчитан ЭД, указывается в паспорте и на
Режим работы, на который рассчитан ЭД, указывается в паспорте и на

Одним из основных критериев выбора ЭД по мощности является температура обмоток
Для
Одним из основных критериев выбора ЭД по мощности является температура обмоток
Для

Выбор мощности приводного ЭД при неизменной нагрузке на валу ЭД
Выбирают ЭД
Выбор мощности приводного ЭД при неизменной нагрузке на валу ЭД
Выбирают ЭД

Пример 1. Определить мощность ЭД для привода водяного насоса с постоянным
Пример 1. Определить мощность ЭД для привода водяного насоса с постоянным

Рассчитывают Pэ
Выбирают ЭД с режимом работы S1, чтобы его мощность превышала
Рассчитывают Pэ
Выбирают ЭД с режимом работы S1, чтобы его мощность превышала

Выбор мощности приводного ЭД при повторно-кратковременной нагрузке на валу ЭД
Рассчитывают ПВ.
Если
Выбор мощности приводного ЭД при повторно-кратковременной нагрузке на валу ЭД
Рассчитывают ПВ.
Если

Выбор мощности приводного ЭД при кратковременной нагрузке на валу ЭД
Выбирают ЭД
Выбор мощности приводного ЭД при кратковременной нагрузке на валу ЭД
Выбирают ЭД

1. Максимальный (критический Мкр) момент ЭД Мmax должен быть несколько больше
1. Максимальный (критический Мкр) момент ЭД Мmax должен быть несколько больше
 Классификация методов спектрального анализа и схемы его проведения
Классификация методов спектрального анализа и схемы его проведения Совершенствование коробки передач автомобиля УАЗ ПАТРИОТ
Совершенствование коробки передач автомобиля УАЗ ПАТРИОТ Реактивний рух в природі та техніці
Реактивний рух в природі та техніці Конспект урока физики в 7 классе по теме Скорость. Единицы скорости
Конспект урока физики в 7 классе по теме Скорость. Единицы скорости Сверхпроводимость
Сверхпроводимость Зависимость ускорения свободного падения от длины нити маятника
Зависимость ускорения свободного падения от длины нити маятника Процессы и аппараты химических технологий
Процессы и аппараты химических технологий Электричество и магнетизм
Электричество и магнетизм Физический биатлон на тему Атмосферное давление
Физический биатлон на тему Атмосферное давление Основні види механізмів
Основні види механізмів Колебательное движение
Колебательное движение Физика - удивительная вещь: она интересна, даже если в ней ничего не понимаешь
Физика - удивительная вещь: она интересна, даже если в ней ничего не понимаешь Параллельное соединение проводников
Параллельное соединение проводников Центр тяжести. Равновесие тел
Центр тяжести. Равновесие тел Адсорбция из растворов на разных поверхностях раздела фаз
Адсорбция из растворов на разных поверхностях раздела фаз Хроматографические методы анализа и их применение для контроля качества лекарственных средств (продолжение)
Хроматографические методы анализа и их применение для контроля качества лекарственных средств (продолжение) Основы термодинамики. Теплообмен. Фазовые переходы. Тепловой баланс
Основы термодинамики. Теплообмен. Фазовые переходы. Тепловой баланс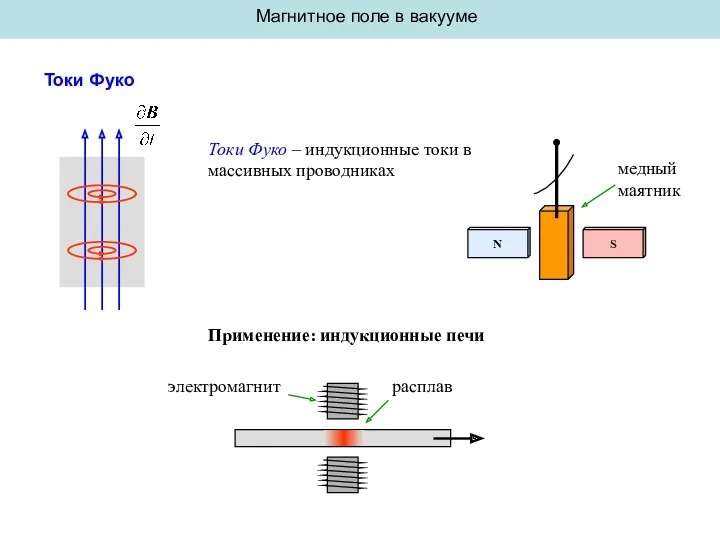 Токи Фуко
Токи Фуко Сила тока. Напряжение
Сила тока. Напряжение Конструкторско-технологическое обеспечение сборки узла привода управления интерцептора и изготовления детали Тяга
Конструкторско-технологическое обеспечение сборки узла привода управления интерцептора и изготовления детали Тяга Lubrication engine
Lubrication engine Вращение твердого тела вокруг неподвижной оси
Вращение твердого тела вокруг неподвижной оси Переходные процессы в линейных электрических цепях
Переходные процессы в линейных электрических цепях Соединение проводников
Соединение проводников Динамика материальной точки и поступательного движения твердого тела
Динамика материальной точки и поступательного движения твердого тела Становление физики как науки в России
Становление физики как науки в России Механическое движение и система отсчета
Механическое движение и система отсчета Количество теплоты. Единицы количества теплоты. Удельная теплоемкость. 8 класс
Количество теплоты. Единицы количества теплоты. Удельная теплоемкость. 8 класс