Показатели качества устойчивых ЛСС и методы их определения. Точность ЛСС в установившемся режиме презентация
- Показатели качества устойчивых ЛСС и методы их определения. Точность ЛСС в установившемся режиме

Содержание
- 2. Качество - обобщенное понятие, определяющее степень работоспособности устойчивых ЛСС. степень устойчивости; быстродействие; точность. 6.1. Показатели качества
- 3. По графику переходной функции h(t) определяются следующие прямые показатели качества: Время регулирования tр - время установления
- 4. Перерегулирование Δhm - относительный максимальный выброс переходной функции h(t) Время срабатывания tср - время достижения переходной
- 5. Приближенные методы определения показателей качества основаны на анализе частотных характеристик АС. Запасы устойчивости ϕ3 и L3,
- 6. 6.2. Точность ЛСС в установившемся режиме при действии медленноменяющихся входных сигналов Методика определения ошибки следящей ЛСС
- 7. S(p) можно разложить в ряд Тейлора в точке p=0, поскольку S(p) рациональная функция и точка p=0
- 8. Как вычислить Si? два полинома равны тогда и только тогда, когда равны коэффициенты при одинаковых степенях
- 9. Пример: x(t) = t+2t2, x(1)(t) = 1+4t, x(2)(t) = 4, x(3)(t) = x(4)(t) =...= 0, следовательно,
- 10. Пример: x(t) = 5-6t+7t2; Ф(p) = где T = 1, K = 1, ξ = 0,5
- 11. Если на следящую ЛСС действует несколько входных сигналов, то в силу линейности АС, справедливо равенство: E(p)
- 12. Ошибка системы в установившемся режиме: e(t) = ex(t)+ef(t) eх(t)=S0x(t)+S1x(1)(t)+S2x(2)(t)+...-составляющая ошибки от задающего сигнала ef(t) = -
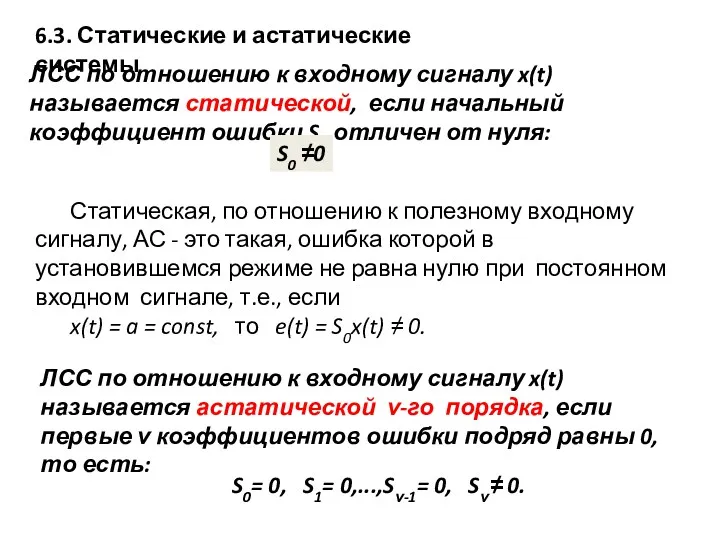
- 13. 6.3. Статические и астатические системы ЛСС по отношению к входному сигналу x(t) называется статической, если начальный
- 14. Например: 1. Ошибка системы e(t) в установившемся режиме равна 0, еслиν > k, т.е. e(t) =
- 15. Основное (необходимое и достаточное) условие астатизма ЛСС по отношению к входному сигналу x(t) является астатической ν-го
- 16. Порядок астатизма замкнутой ЛСС по отношению к задающему воздействию равен числу интегрирующих звеньев в передаточной функции
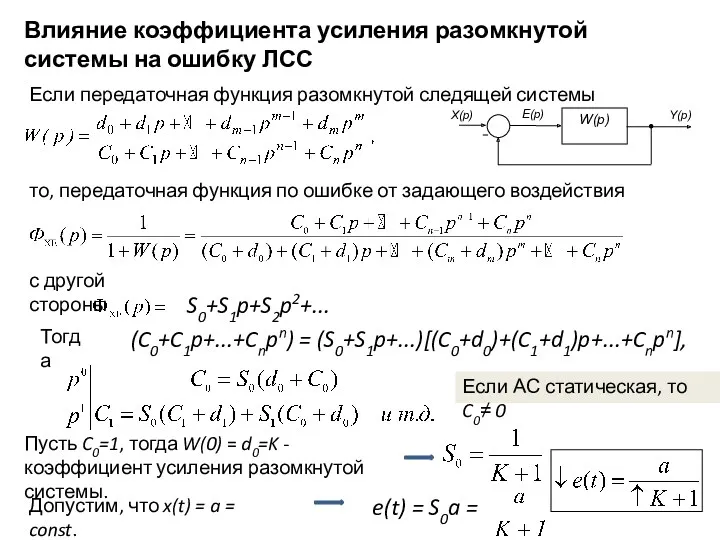
- 17. Влияние коэффициента усиления разомкнутой системы на ошибку ЛСС Если передаточная функция разомкнутой следящей системы то, передаточная
- 18. Ошибка статической АС в отработке постоянного входного сигнала уменьшается при увеличении коэффициента усиления разомкнутой системы. вывод
- 19. Связь коэффициентов ai, вi передаточной функции замкнутой системы с порядком ее астатизма ν Пусть передаточная функция
- 20. 6.4. Оценка качества переходного процесса по распределению корней характеристического уравнения АС Рассмотрим передаточную функцию устойчивой АС,
- 21. Ближайшему к мнимой оси полюсу соответствует медленно изменяющаяся составляющая переходной функции, следовательно, величина η определяет время
- 22. 6.5. Связь показателей качества замкнутой АС с параметрами ЛЧХ разомкнутой системы Рассмотрим на примере АС второго
- 23. Рассмотрим три возможных вида ЛЧХ разомкнутой системы Низкочастотная асимптота, соответствующая ЛАХ интегрирующего звена, пересекает ось абсцисс
- 24. Если у колебательного звена ξ 20:30%). Это те АС, у которых ωc лежит на участке ЛАХ
- 25. Система имеет хорошее качество управления (малое перерегулирование, большой запас устойчивости), если наклон отрезка ЛАХ, имеющего верхнюю
- 26. 1. Точность АС определяется параметрами низкочастотной асимптоты ЛАХ разомкнутой системы. 2. Степень колебательности (Δhm) и быстродействие
- 27. 1. Наклон низкочастотной асимптоты α определяет порядок астатизма АС по отношению к задающему воздействию. Если α
- 28. 6.6. Интегральная квадратичная оценка качества (ИКО) Интегральная оценка качества является косвенным показателем качества АС, так как
- 29. В качестве функции f(t) обычно используют временные характеристики АС удовлетворяющие условию абсолютной интегрируемости: 1. Весовая функция
- 30. Интегральная квадратичная оценка (ИКО) I =
- 31. Пусть известно изображение по Лапласу подынтегральной функции f(t): Допустим, что все корни полинома A(p), имеют отрицательные
- 32. -это квадратная матрица n-го порядка, которая отличается от матрицы A только элементами последнего столбца, которые определяются
- 34. Скачать презентацию
Качество - обобщенное понятие, определяющее степень работоспособности устойчивых ЛСС.
степень устойчивости; быстродействие;
Качество - обобщенное понятие, определяющее степень работоспособности устойчивых ЛСС.
степень устойчивости; быстродействие;
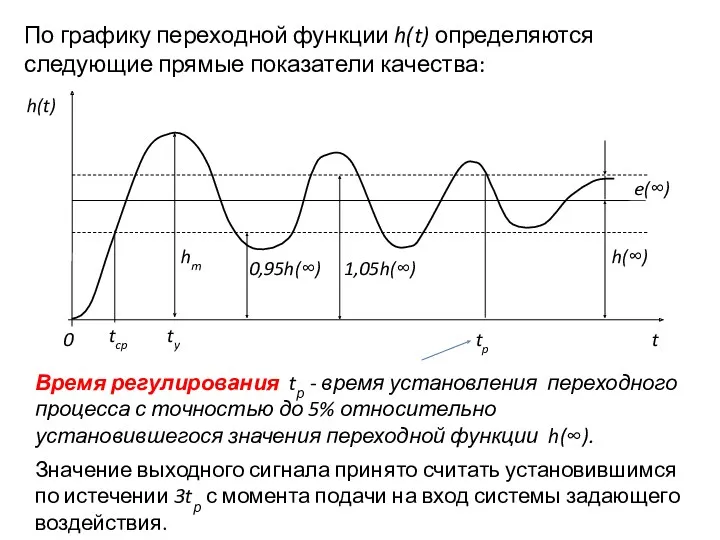
По графику переходной функции h(t) определяются следующие прямые показатели качества:
Время регулирования
По графику переходной функции h(t) определяются следующие прямые показатели качества:
Время регулирования
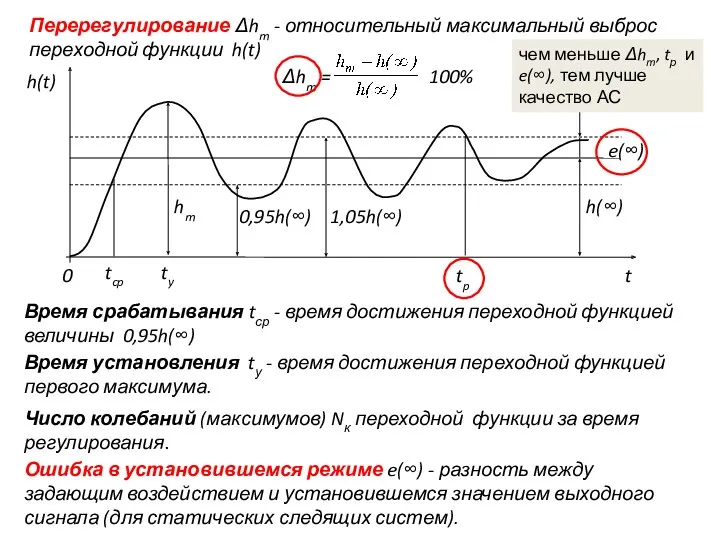
Перерегулирование Δhm - относительный максимальный выброс переходной функции h(t)
Время срабатывания tср
Перерегулирование Δhm - относительный максимальный выброс переходной функции h(t)
Время срабатывания tср
Приближенные методы определения показателей качества основаны на анализе частотных характеристик АС.
Запасы
Приближенные методы определения показателей качества основаны на анализе частотных характеристик АС.
Запасы
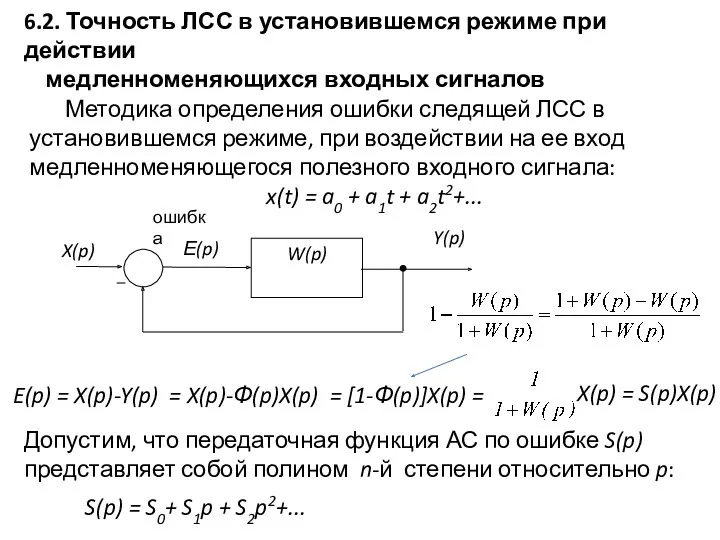
6.2. Точность ЛСС в установившемся режиме при действии
медленноменяющихся входных сигналов
6.2. Точность ЛСС в установившемся режиме при действии
медленноменяющихся входных сигналов
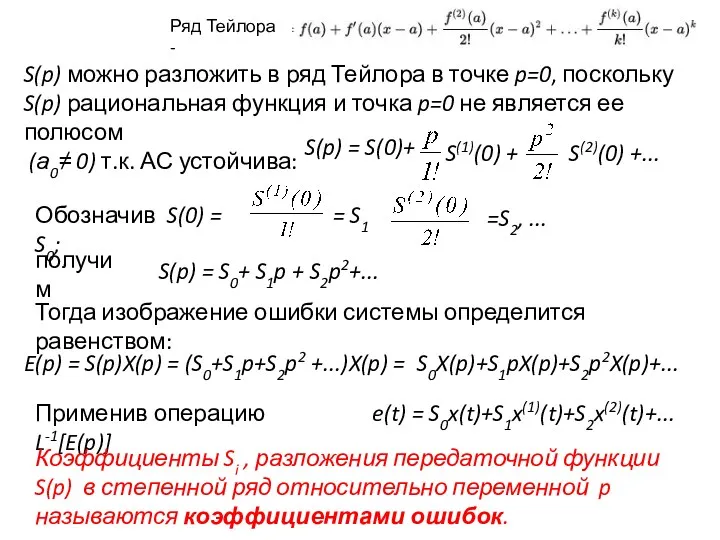
S(p) можно разложить в ряд Тейлора в точке p=0, поскольку S(p)
S(p) можно разложить в ряд Тейлора в точке p=0, поскольку S(p)
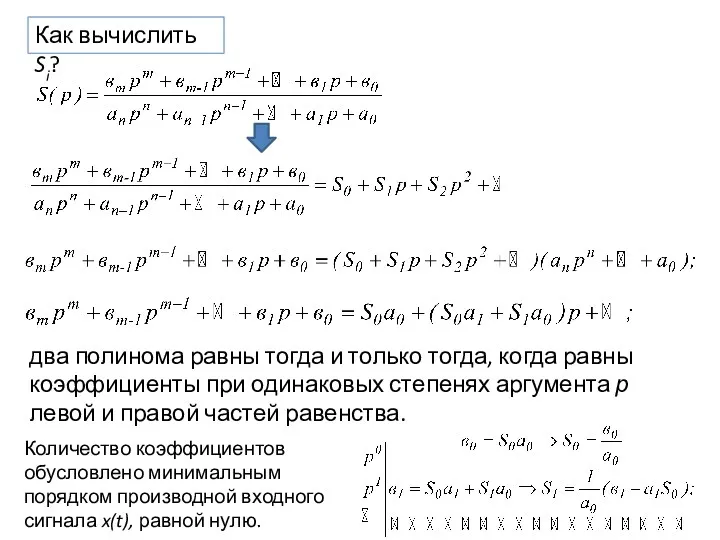
Как вычислить Si?
два полинома равны тогда и только тогда, когда равны
Как вычислить Si?
два полинома равны тогда и только тогда, когда равны
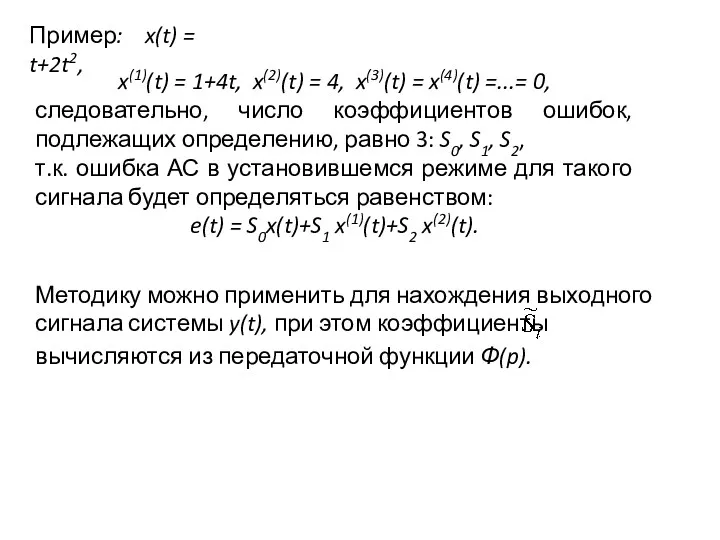
Пример: x(t) = t+2t2,
x(1)(t) = 1+4t, x(2)(t) = 4, x(3)(t) =
Пример: x(t) = t+2t2,
x(1)(t) = 1+4t, x(2)(t) = 4, x(3)(t) =
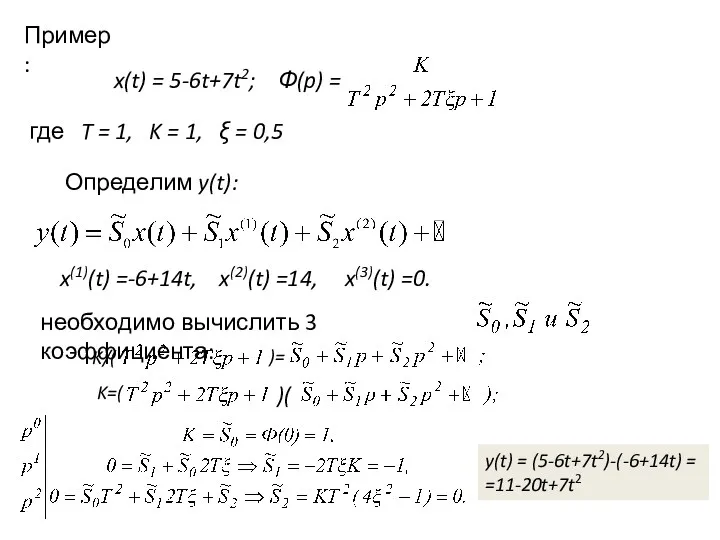
Пример:
x(t) = 5-6t+7t2; Ф(p) =
где T = 1, K = 1,
Пример:
x(t) = 5-6t+7t2; Ф(p) =
где T = 1, K = 1,
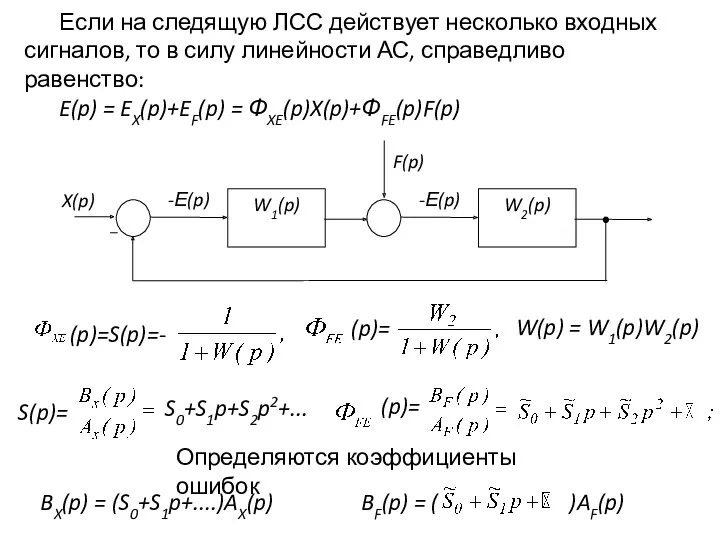
Если на следящую ЛСС действует несколько входных сигналов, то в силу
Если на следящую ЛСС действует несколько входных сигналов, то в силу
Ошибка системы в установившемся режиме:
e(t) = ex(t)+ef(t)
eх(t)=S0x(t)+S1x(1)(t)+S2x(2)(t)+...-составляющая ошибки от задающего сигнала
ef(t)
Ошибка системы в установившемся режиме:
e(t) = ex(t)+ef(t)
eх(t)=S0x(t)+S1x(1)(t)+S2x(2)(t)+...-составляющая ошибки от задающего сигнала
ef(t)
6.3. Статические и астатические системы
ЛСС по отношению к входному сигналу x(t)
6.3. Статические и астатические системы
ЛСС по отношению к входному сигналу x(t)
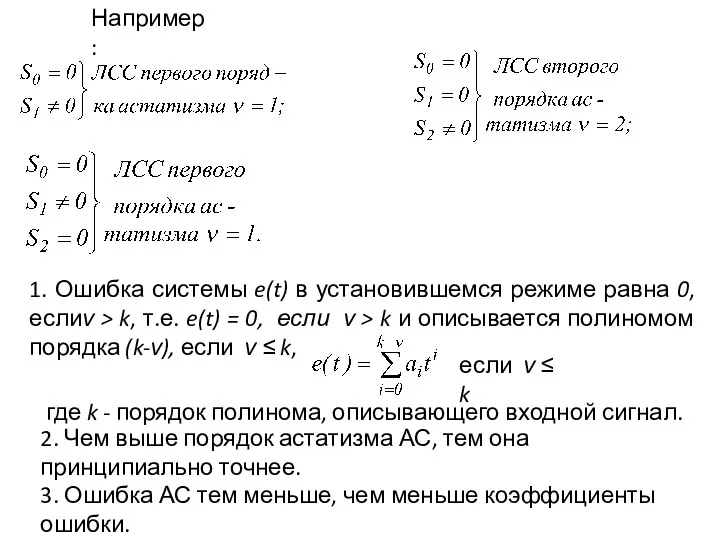
Например:
1. Ошибка системы e(t) в установившемся режиме равна 0, еслиν >
Например:
1. Ошибка системы e(t) в установившемся режиме равна 0, еслиν >
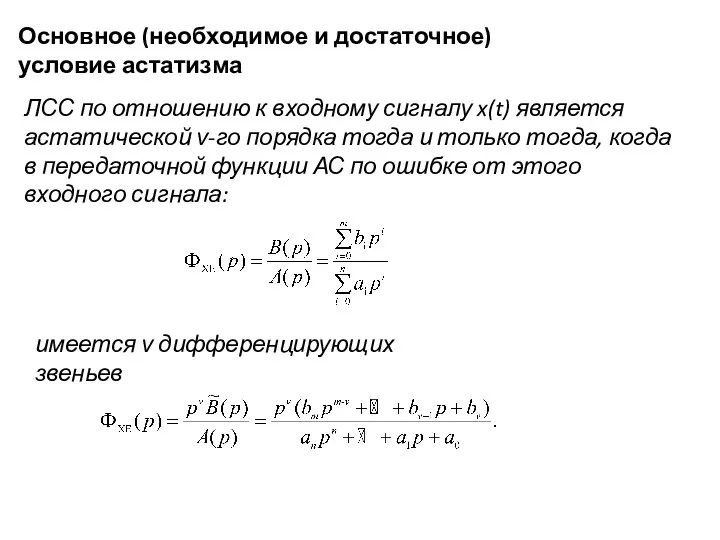
Основное (необходимое и достаточное)
условие астатизма
ЛСС по отношению к входному сигналу
Основное (необходимое и достаточное)
условие астатизма
ЛСС по отношению к входному сигналу
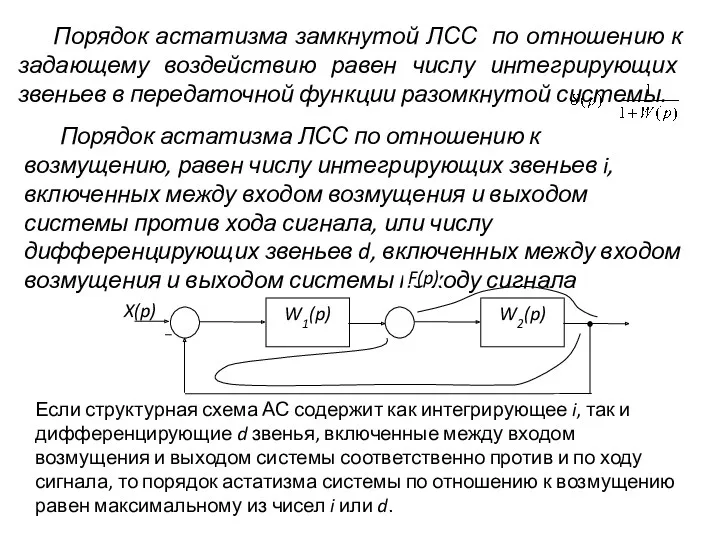
Порядок астатизма замкнутой ЛСС по отношению к задающему воздействию равен числу
Порядок астатизма замкнутой ЛСС по отношению к задающему воздействию равен числу
Влияние коэффициента усиления разомкнутой
системы на ошибку ЛСС
Если передаточная функция разомкнутой
Влияние коэффициента усиления разомкнутой
системы на ошибку ЛСС
Если передаточная функция разомкнутой
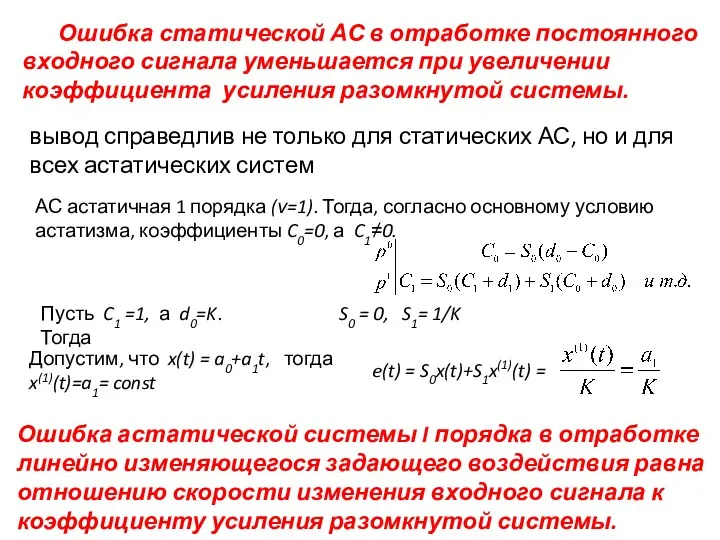
Ошибка статической АС в отработке постоянного входного сигнала уменьшается при увеличении
Ошибка статической АС в отработке постоянного входного сигнала уменьшается при увеличении
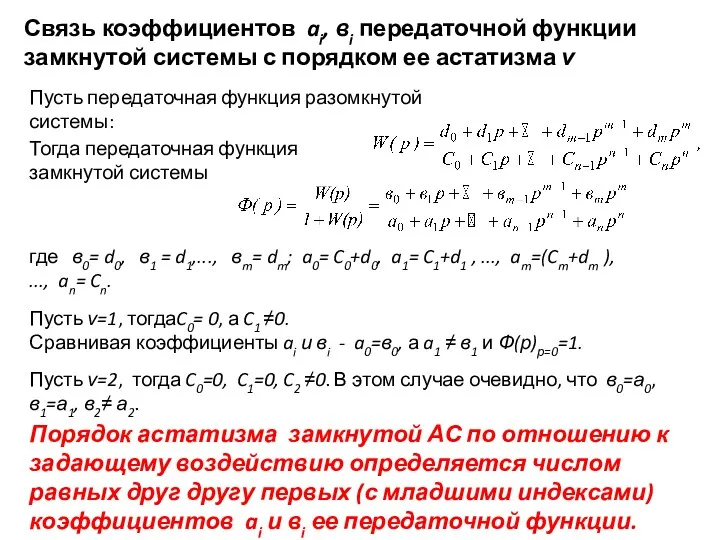
Связь коэффициентов ai, вi передаточной функции замкнутой системы с порядком ее
Связь коэффициентов ai, вi передаточной функции замкнутой системы с порядком ее
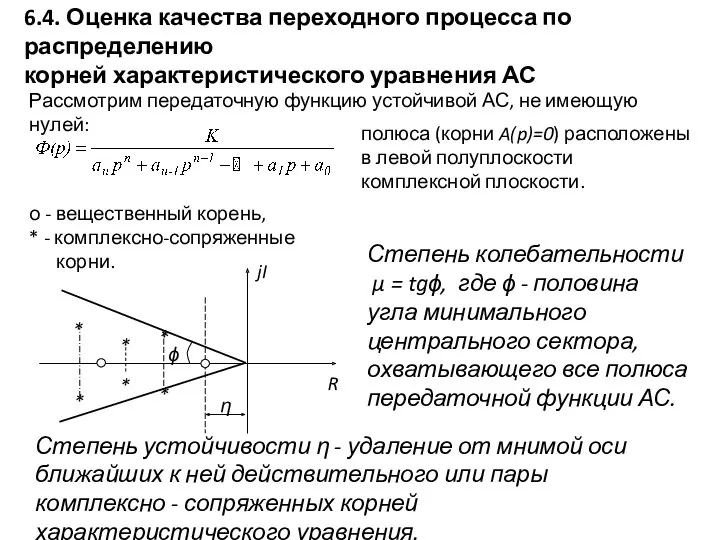
6.4. Оценка качества переходного процесса по распределению
корней характеристического уравнения АС
Рассмотрим
6.4. Оценка качества переходного процесса по распределению
корней характеристического уравнения АС
Рассмотрим
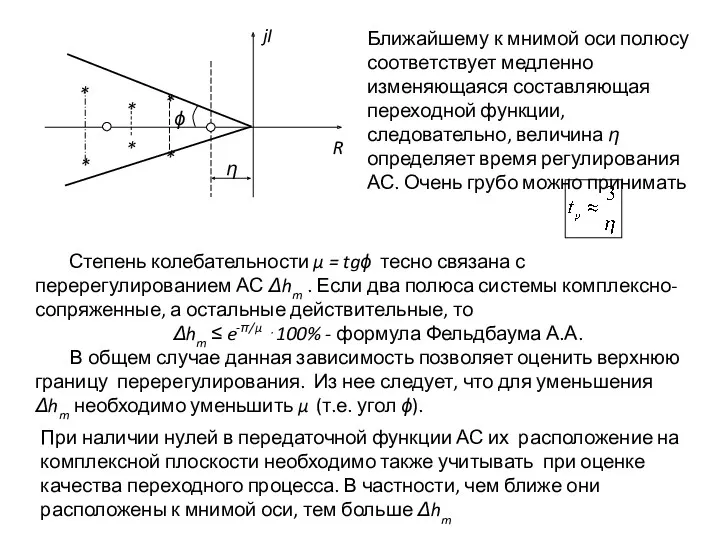
Ближайшему к мнимой оси полюсу соответствует медленно изменяющаяся составляющая переходной функции,
Ближайшему к мнимой оси полюсу соответствует медленно изменяющаяся составляющая переходной функции,
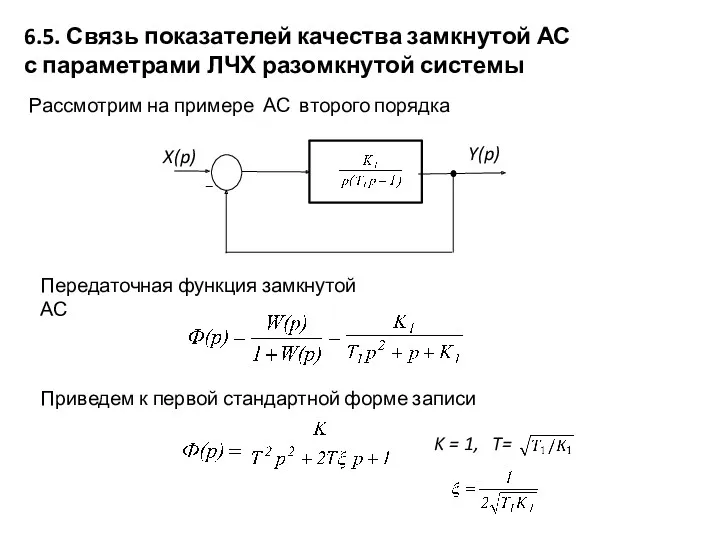
6.5. Связь показателей качества замкнутой АС
с параметрами ЛЧХ разомкнутой системы
Рассмотрим
6.5. Связь показателей качества замкнутой АС
с параметрами ЛЧХ разомкнутой системы
Рассмотрим
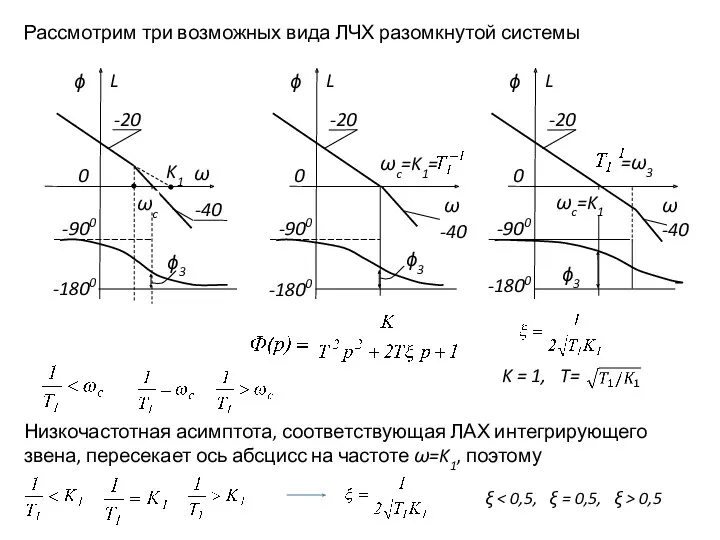
Рассмотрим три возможных вида ЛЧХ разомкнутой системы
Низкочастотная асимптота, соответствующая ЛАХ интегрирующего
Рассмотрим три возможных вида ЛЧХ разомкнутой системы
Низкочастотная асимптота, соответствующая ЛАХ интегрирующего
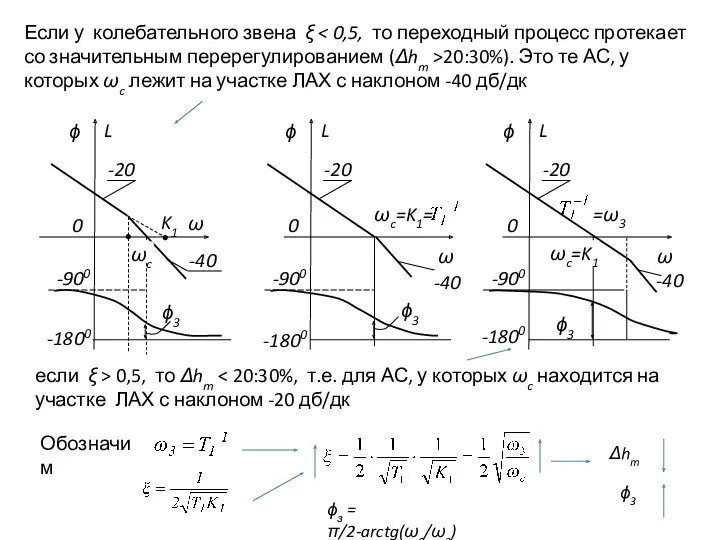
Если у колебательного звена ξ < 0,5, то переходный процесс протекает
Если у колебательного звена ξ < 0,5, то переходный процесс протекает
Система имеет хорошее качество управления (малое перерегулирование, большой запас устойчивости), если
Система имеет хорошее качество управления (малое перерегулирование, большой запас устойчивости), если
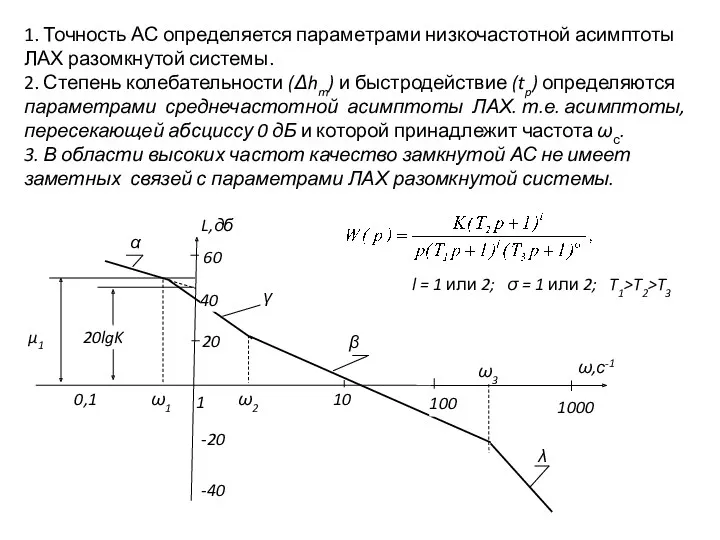
1. Точность АС определяется параметрами низкочастотной асимптоты ЛАХ разомкнутой системы.
2. Степень
1. Точность АС определяется параметрами низкочастотной асимптоты ЛАХ разомкнутой системы.
2. Степень
1. Наклон низкочастотной асимптоты α определяет порядок астатизма АС по отношению
1. Наклон низкочастотной асимптоты α определяет порядок астатизма АС по отношению
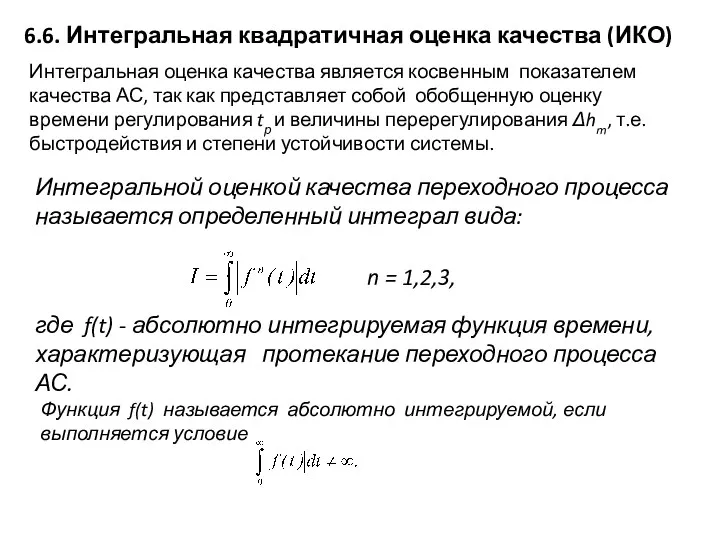
6.6. Интегральная квадратичная оценка качества (ИКО)
Интегральная оценка качества является косвенным показателем
6.6. Интегральная квадратичная оценка качества (ИКО)
Интегральная оценка качества является косвенным показателем
В качестве функции f(t) обычно используют временные характеристики АС удовлетворяющие условию
В качестве функции f(t) обычно используют временные характеристики АС удовлетворяющие условию
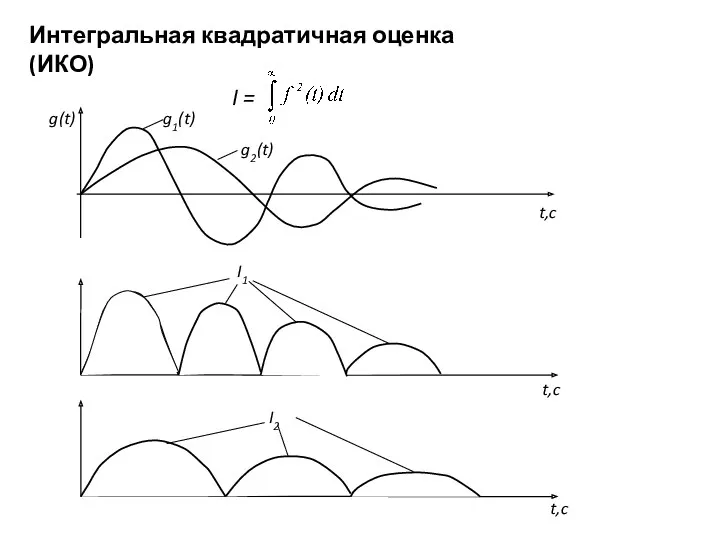
Интегральная квадратичная оценка (ИКО)
I =
Интегральная квадратичная оценка (ИКО)
I =
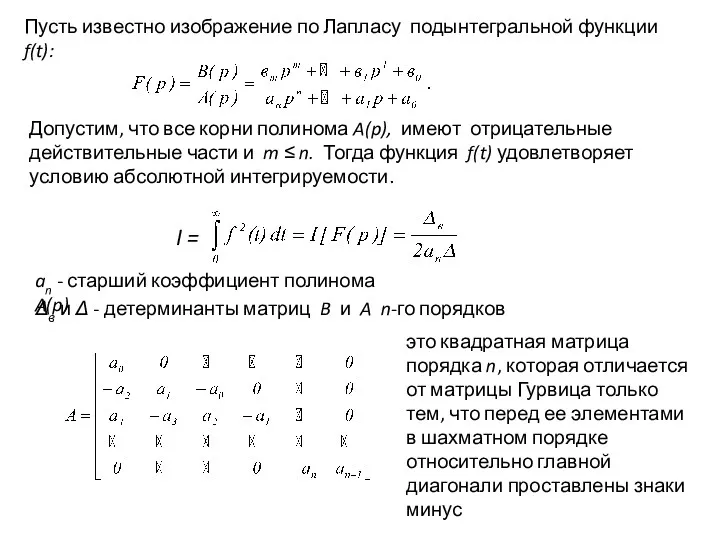
Пусть известно изображение по Лапласу подынтегральной функции f(t):
Допустим, что все корни
Пусть известно изображение по Лапласу подынтегральной функции f(t):
Допустим, что все корни
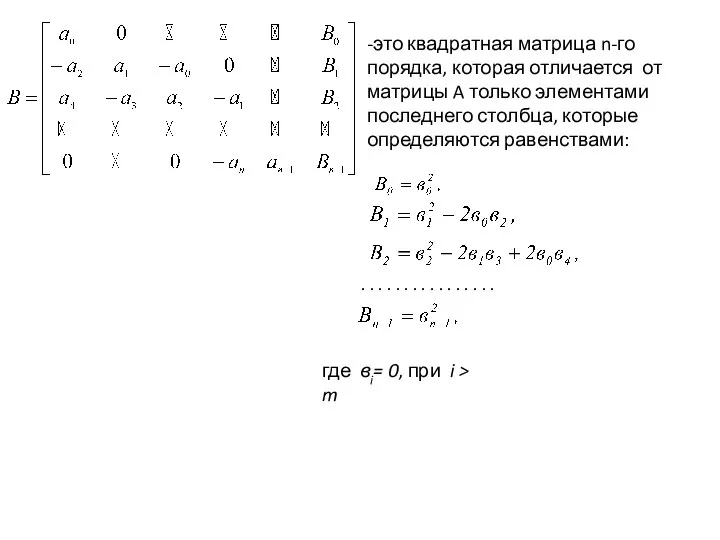
-это квадратная матрица n-го порядка, которая отличается от матрицы A только
-это квадратная матрица n-го порядка, которая отличается от матрицы A только
 Теплопроводность. Нестационарная теплопроводность. (Тема 4. Лекции 16,17)
Теплопроводность. Нестационарная теплопроводность. (Тема 4. Лекции 16,17) Теплові двигуни
Теплові двигуни Физико-технические основы электроэнергетики. Лекция 10
Физико-технические основы электроэнергетики. Лекция 10 Работа и энергия. Механическая работа. Мощность
Работа и энергия. Механическая работа. Мощность Линзы. Построение изображений, даваемых линзой.
Линзы. Построение изображений, даваемых линзой. Курс физики
Курс физики Первый искусственный спутник Земли
Первый искусственный спутник Земли Принцип неопределённости Гейзенберга 1927
Принцип неопределённости Гейзенберга 1927 Распространяющиеся в пространстве возмущения электромагнитного поля
Распространяющиеся в пространстве возмущения электромагнитного поля Презентация к уроку физики Электрический ток. Источники тока
Презентация к уроку физики Электрический ток. Источники тока Геоцентрическая система мира
Геоцентрическая система мира Прямой чистый изгиб. Поперечный плоский изгиб
Прямой чистый изгиб. Поперечный плоский изгиб Камера-обскура. Интересные факты
Камера-обскура. Интересные факты магнитные явления
магнитные явления Haemodynamics Haemorheology
Haemodynamics Haemorheology Электрическое освещение. Лекция 3
Электрическое освещение. Лекция 3 Деление ядер урана. Цепные ядерные реакции
Деление ядер урана. Цепные ядерные реакции Физические основы высоких технологий. (Колебания и волны)
Физические основы высоких технологий. (Колебания и волны) Электрический заряд. Дискретность электрического заряда
Электрический заряд. Дискретность электрического заряда Колесо с резиновыми спицами
Колесо с резиновыми спицами Силы в природе (7 класс)
Силы в природе (7 класс) Теория автоматического управления
Теория автоматического управления Физика Солнца
Физика Солнца Основные требования и допуски при финальной сборке. Виды и методики измерения
Основные требования и допуски при финальной сборке. Виды и методики измерения Физические явления
Физические явления Напряженно-деформированное состояние в точке
Напряженно-деформированное состояние в точке Средства механизации строительства
Средства механизации строительства Диэлектриктер. Диэлектриктердің қасиеттері
Диэлектриктер. Диэлектриктердің қасиеттері