- Понятие и принципы построения математической модели физических систем

Содержание
- 2. Попытаемся построить простейшую модель маятника в виде массивного груза, подвешенного на нити и совершающего периодические или
- 3. В первую очередь нам необходимо сформулировать физическую модель. Колебание маятника не равномерное: в какой-то момент времени
- 4. Есть еще силы трения, в первую очередь, сила трения о воздух. При малых скоростях движения груза
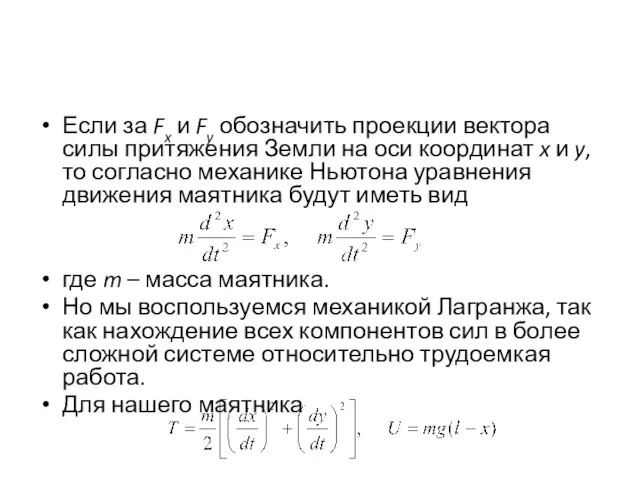
- 5. Если за Fx и Fy обозначить проекции вектора силы притяжения Земли на оси координат x и
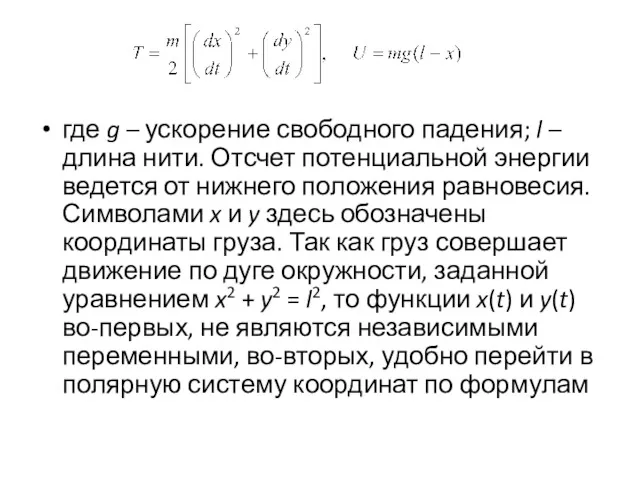
- 6. где g – ускорение свободного падения; l – длина нити. Отсчет потенциальной энергии ведется от нижнего
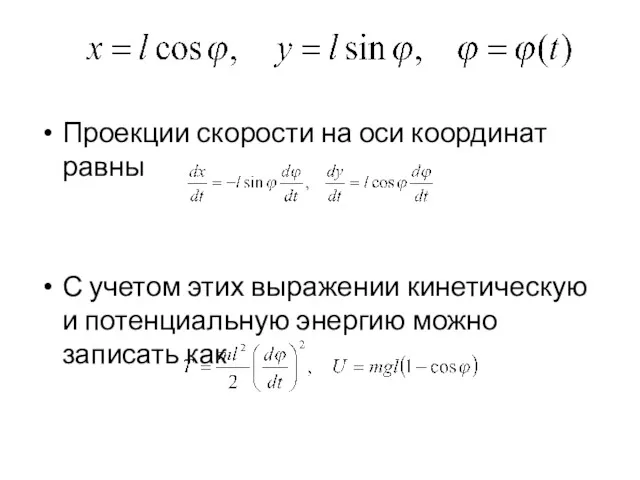
- 7. Проекции скорости на оси координат равны С учетом этих выражении кинетическую и потенциальную энергию можно записать
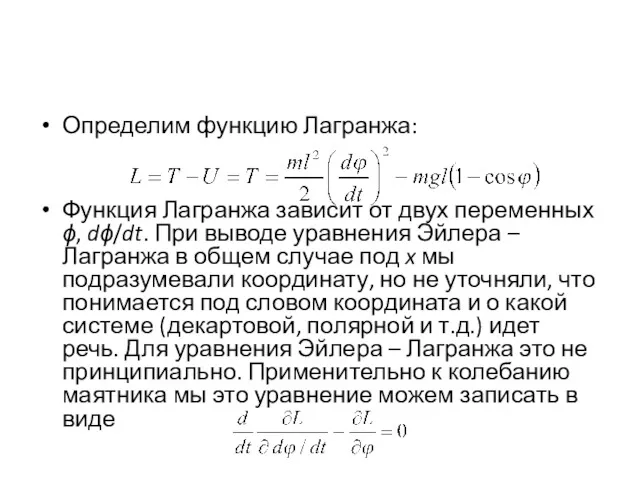
- 8. Определим функцию Лагранжа: Функция Лагранжа зависит от двух переменных ϕ, dϕ/dt. При выводе уравнения Эйлера –
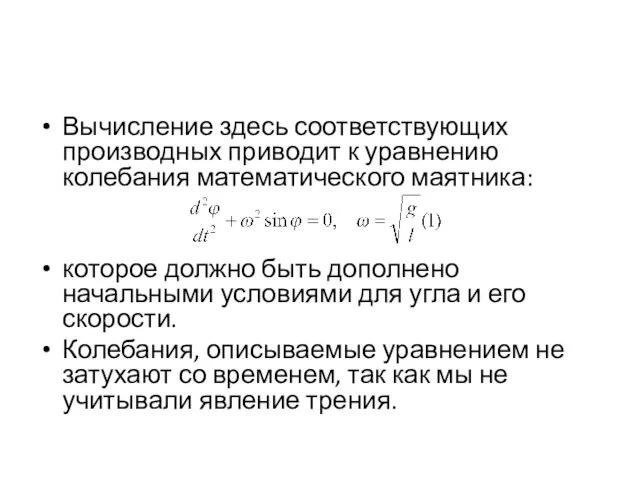
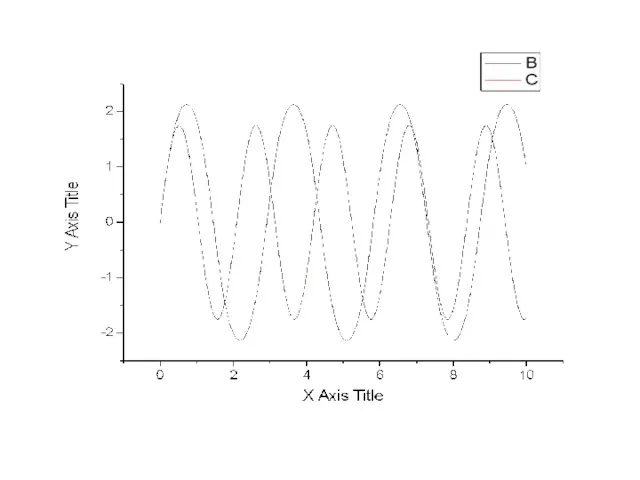
- 9. Вычисление здесь соответствующих производных приводит к уравнению колебания математического маятника: которое должно быть дополнено начальными условиями
- 10. Если тело при взаимодействии с другими телами (или средами) увеличивает их кинетическую энергию, то тело испытывает
- 11. Характер силы гидродинамического сопротивления определяется одним безразмерным параметром Re, который называется числом Рейнольдса. Для тела достаточно
- 12. Так как идет речь о простейшей модели маятника, то мы вместо ΔV подставим окружную скорость самого
- 13. где отрицательный знак означает, что сила Fc тормозящая. С учетом этой силы трения уравнение движения маятника
- 14. Координату тела массы m1 обозначим за y, а координаты груза m2 – за x2 и y2.
- 15. являющиеся компонентами скорости подвешенного груза. Скорость движения подвеса равна dy/dt. Тогда полная кинетическая энергия системы T
- 16. Вклад в полную потенциальную энергию U дает только подвешенный груз: Искомые уравнения движения из функции Лагранжа
- 17. Вычисление производных здесь не представляет трудностей. Опуская несложные выкладки, приведем соответствующие уравнения
- 18. В приведенной форме эти уравнения не удобны для численного решения. Чтобы привести их в нормальную форму
- 19. #include #include #include float omeg= 3; float Fx(float x, float v, float t); float Fv(float x,
- 20. x=x0; v=v0; //nach uslovie for (t=0; t { xt=v0/omeg*sin(omeg*t); printf (" t= %.3f, x= %.3f xt=
- 21. float Fx(float x, float v, float t) { float c; c=v; return c; } float Fv(float
- 24. Скачать презентацию
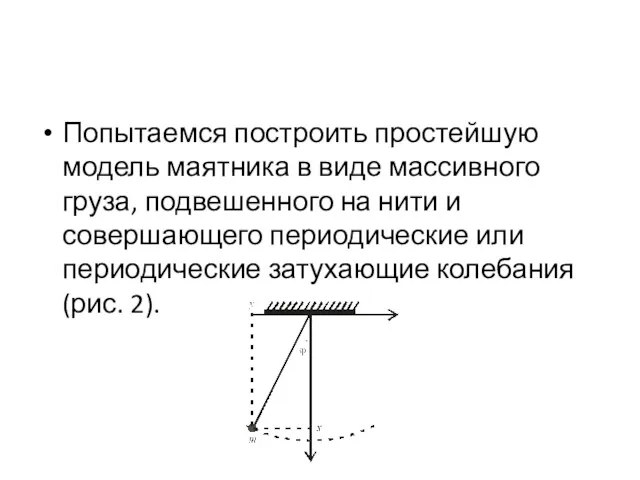
Попытаемся построить простейшую модель маятника в виде массивного груза, подвешенного на
Попытаемся построить простейшую модель маятника в виде массивного груза, подвешенного на
В первую очередь нам необходимо сформулировать физическую модель. Колебание маятника не
В первую очередь нам необходимо сформулировать физическую модель. Колебание маятника не
Есть еще силы трения, в первую очередь, сила трения о воздух.
Есть еще силы трения, в первую очередь, сила трения о воздух.
Если за Fx и Fy обозначить проекции вектора силы притяжения Земли
Если за Fx и Fy обозначить проекции вектора силы притяжения Земли
где g – ускорение свободного падения; l – длина нити. Отсчет
где g – ускорение свободного падения; l – длина нити. Отсчет
Проекции скорости на оси координат равны
С учетом этих выражении кинетическую и
Проекции скорости на оси координат равны
С учетом этих выражении кинетическую и
Определим функцию Лагранжа:
Функция Лагранжа зависит от двух переменных ϕ, dϕ/dt. При
Определим функцию Лагранжа:
Функция Лагранжа зависит от двух переменных ϕ, dϕ/dt. При
Вычисление здесь соответствующих производных приводит к уравнению колебания математического маятника:
которое должно
Вычисление здесь соответствующих производных приводит к уравнению колебания математического маятника:
которое должно
Если тело при взаимодействии с другими телами (или средами) увеличивает их
Если тело при взаимодействии с другими телами (или средами) увеличивает их
Характер силы гидродинамического сопротивления определяется одним безразмерным параметром Re, который называется
Характер силы гидродинамического сопротивления определяется одним безразмерным параметром Re, который называется
Так как идет речь о простейшей модели маятника, то мы вместо
Так как идет речь о простейшей модели маятника, то мы вместо
где отрицательный знак означает, что сила Fc тормозящая. С учетом этой
где отрицательный знак означает, что сила Fc тормозящая. С учетом этой
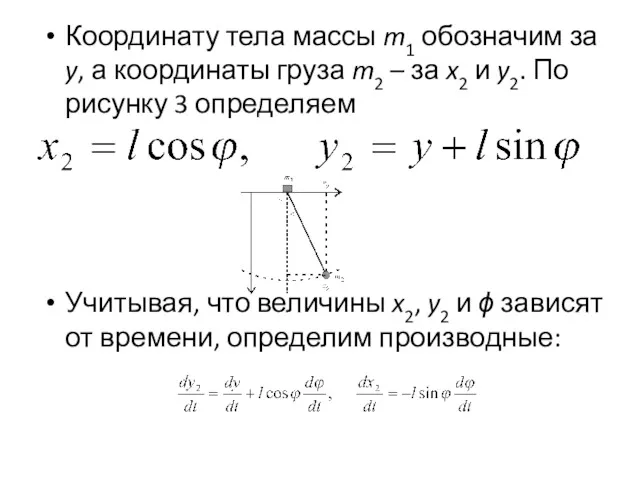
Координату тела массы m1 обозначим за y, а координаты груза m2
Координату тела массы m1 обозначим за y, а координаты груза m2
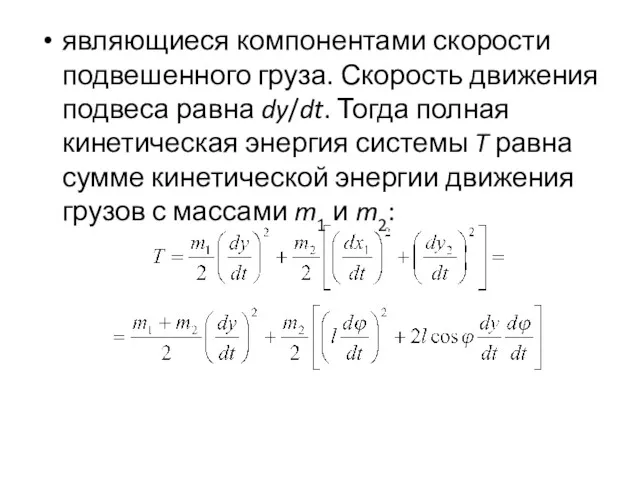
являющиеся компонентами скорости подвешенного груза. Скорость движения подвеса равна dy/dt. Тогда
являющиеся компонентами скорости подвешенного груза. Скорость движения подвеса равна dy/dt. Тогда
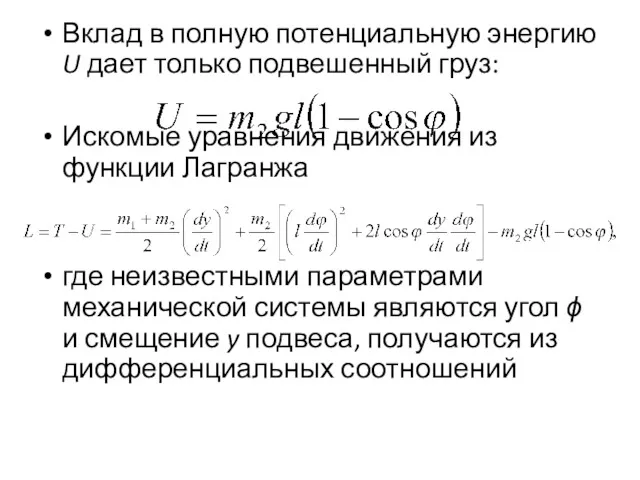
Вклад в полную потенциальную энергию U дает только подвешенный груз:
Искомые
Вклад в полную потенциальную энергию U дает только подвешенный груз:
Искомые
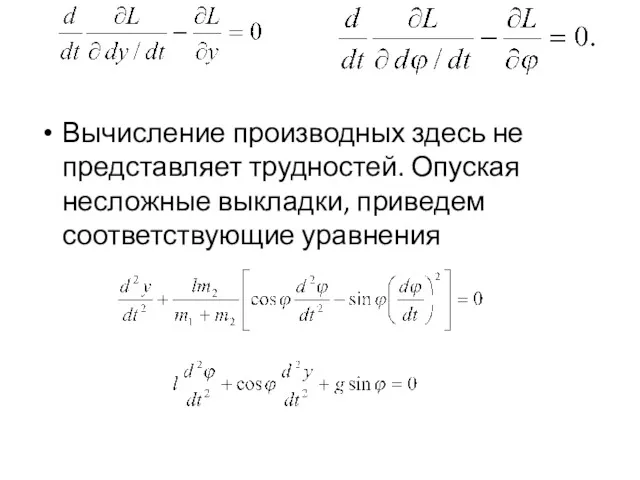
Вычисление производных здесь не представляет трудностей. Опуская несложные выкладки, приведем соответствующие
Вычисление производных здесь не представляет трудностей. Опуская несложные выкладки, приведем соответствующие
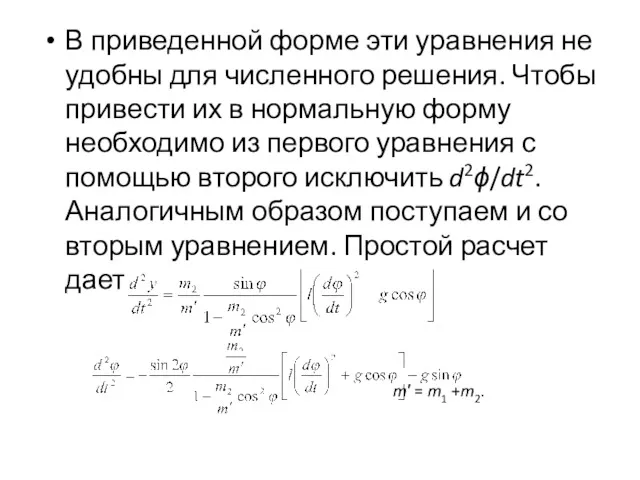
В приведенной форме эти уравнения не удобны для численного решения. Чтобы
В приведенной форме эти уравнения не удобны для численного решения. Чтобы
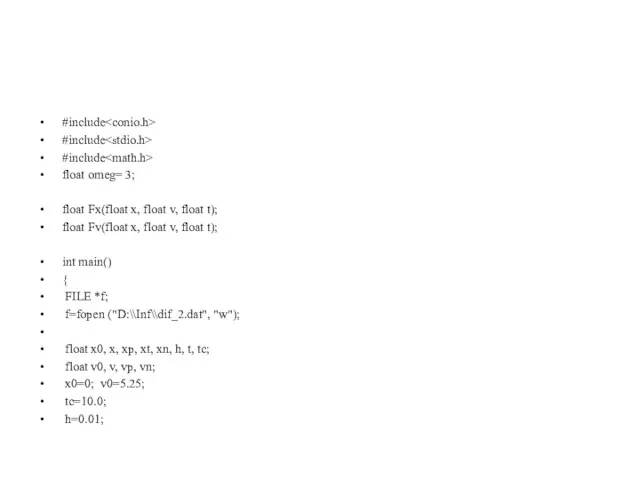
#include
#include
#include
float omeg= 3;
float Fx(float x, float v, float t);
float Fv(float x,
#include
#include
#include
float omeg= 3;
float Fx(float x, float v, float t);
float Fv(float x,
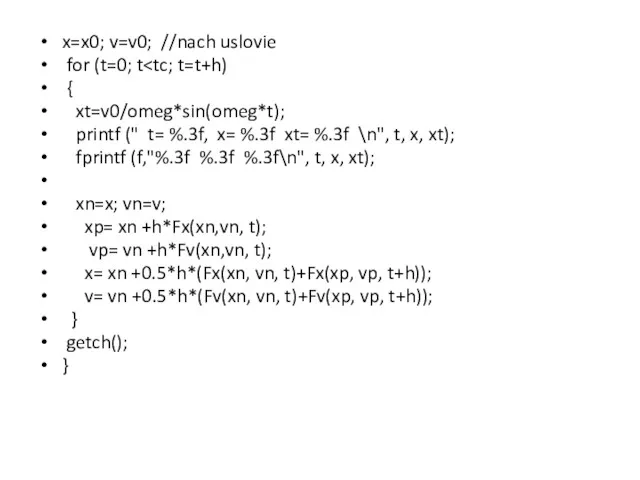
x=x0; v=v0; //nach uslovie
for (t=0; t {
xt=v0/omeg*sin(omeg*t);
printf
x=x0; v=v0; //nach uslovie
for (t=0; t
xt=v0/omeg*sin(omeg*t);
printf
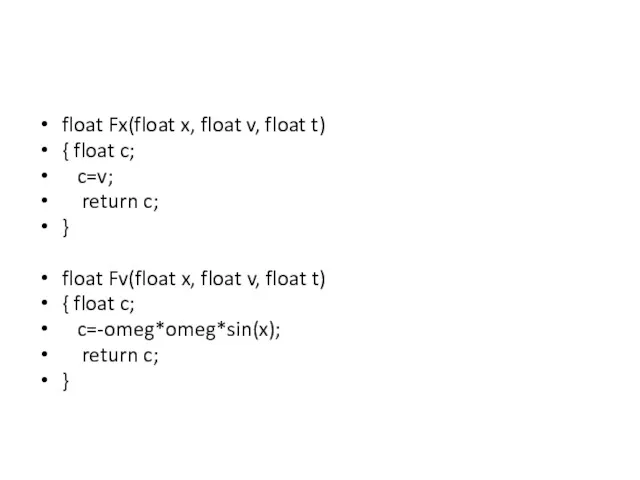
float Fx(float x, float v, float t)
{ float c;
c=v;
float Fx(float x, float v, float t)
{ float c;
c=v;
 Постоянный электрический ток
Постоянный электрический ток Электромагнетизм. Уравнения Максвелла. Лекция 4
Электромагнетизм. Уравнения Максвелла. Лекция 4 Электромагнитное поле. Электромагнитные волны
Электромагнитное поле. Электромагнитные волны Лабораторная работа по физике в 11 классе Наблюдение линейчатого и сплошного спектров
Лабораторная работа по физике в 11 классе Наблюдение линейчатого и сплошного спектров Датчики. Датчики крутящего момента. Датчики уровня
Датчики. Датчики крутящего момента. Датчики уровня Процедура разборки КПП Wet 8DCT (D8LF1)
Процедура разборки КПП Wet 8DCT (D8LF1) Unusual modes pf transport
Unusual modes pf transport Техническая термодинамика. Второй закон термодинамики. (Лекция 3)
Техническая термодинамика. Второй закон термодинамики. (Лекция 3) Простые механизмы. Работа. Мощность. Энергия
Простые механизмы. Работа. Мощность. Энергия Способы восстановления деталей
Способы восстановления деталей Магнитное поле. 11 класс
Магнитное поле. 11 класс Физические явления
Физические явления Электростатика. Электризация. Заряд. Взаимодействие зарядов. Закон Кулона
Электростатика. Электризация. Заряд. Взаимодействие зарядов. Закон Кулона Волновые процессы. Эффект Допплера. (Лекция 1)
Волновые процессы. Эффект Допплера. (Лекция 1) Электростатика. Тема 1. Электростатическое поле в вакууме
Электростатика. Тема 1. Электростатическое поле в вакууме Урок № 36 2 Промывочные жидкости
Урок № 36 2 Промывочные жидкости Линзы. Понятие о линзе
Линзы. Понятие о линзе Закони збереження в механіці
Закони збереження в механіці Электромагнитная индукция. Энергия магнитного поля. Лекция №11
Электромагнитная индукция. Энергия магнитного поля. Лекция №11 Модель атома. Опыт Резерфорда. Постулаты Бора
Модель атома. Опыт Резерфорда. Постулаты Бора Гидродинамика
Гидродинамика Охлаждение, нагревание тел конечных размеров. Нагрев параллелепипеда
Охлаждение, нагревание тел конечных размеров. Нагрев параллелепипеда Анализ сигналов
Анализ сигналов Физико – химические характеристики электротехнических материалов
Физико – химические характеристики электротехнических материалов Коробка скоростей
Коробка скоростей Электроразведка. Электромагнитные зондирования
Электроразведка. Электромагнитные зондирования Лекция 15. Тема: Закон Био-Савара - Лапласа
Лекция 15. Тема: Закон Био-Савара - Лапласа Предыстория радиотехники. Лекция 1
Предыстория радиотехники. Лекция 1