- Проектирование и расчет механизмов передвижения

Содержание
- 2. ПРОЕКТИРОВАНИЕ И РАСЧЕТ МЕХАНИЗМОВ ПЕРЕДВИЖЕНИЯ Общие сведения Механизм передвижения предназначен для перемещения груза в горизонтальной плоскости.
- 3. МЕХАНИЗМЫ ПЕРЕДВИЖЕНИЯ ДЛЯ РЕЛЬСОВОГО ПУТИ
- 4. МЕХАНИЗМЫ ПЕРЕДВИЖЕНИЯ ДЛЯ БЕЗРЕЛЬСОВОГО ПУТИ
- 5. МЕХАНИЗМЫ ПЕРЕДВИЖЕНИЯ ДЛЯ КАНАТНОГО ПУТИ
- 7. СХЕМЫ МЕХАНИЗМОВ ПЕРЕДВИЖЕНИЯ КРАНОВ а – с тихоходным валом; б – с быстроходным валом; в –
- 8. СХЕМА КАНАТНОГО МЕХАНИЗМА ПЕРЕДВИЖЕНИЯ 1 – барабан; 2 – тяговый канат; 3 – поддерживающие ролики; 4
- 9. КОНСТРУКЦИЯ И РАСЧЕТ ХОДОВЫХ КОЛЕС Зависит от типа грузоподъемной машины. Колеса выполняют из стали, чугуна или
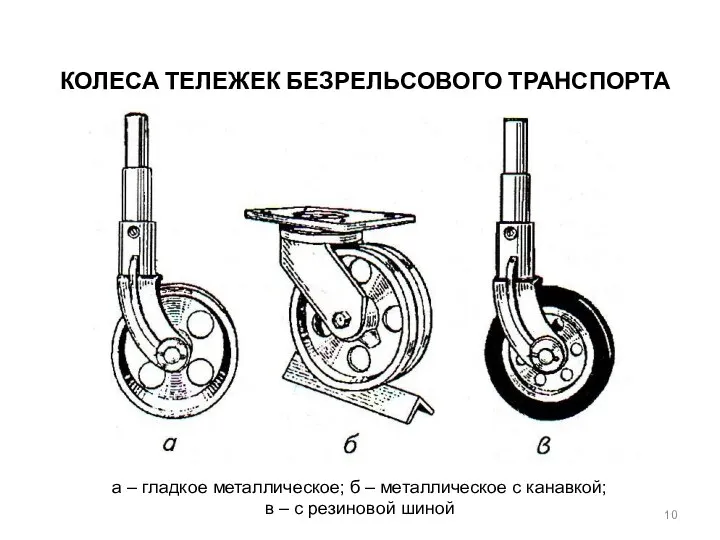
- 10. КОЛЕСА ТЕЛЕЖЕК БЕЗРЕЛЬСОВОГО ТРАНСПОРТА а – гладкое металлическое; б – металлическое с канавкой; в – с
- 11. ФОРМЫ ОБОДОВ ХОДОВЫХ КОЛЕС, ПЕРЕМЕЩАЮЩИЕСЯ ПО РЕЛЬСОВЫМ ПУТЯМ а – коническая; б – бочкообразная; в -
- 12. ПОРЯДОК РАСЧЕТА РАСЧЕТА ХОДОВЫХ КОЛЕС 1. Выбирают конструкцию колеса. 2. Определяют наибольшую нагрузку на колесо. При
- 13. СХЕМА КОНТАКТА ХОДОВОГО КОЛЕСА С РЕЛЬСОМ а, б – линейный контакт; в, г, д, е –
- 14. НАПРЯЖЕНИЯ В ЗОНЕ КОНТАКТА КОЛЕСА С РЕЛЬСОМ Линейный контакт Точечный контакт где a1 и a2 -
- 15. ДОПУСТИМОЕ НАПРЯЖЕНИЕ ДЛЯ КОВАННЫХ И ШТАМПОВАННЫХ КОЛЕС При числе оборотов N ≤ 104 за весь срок
- 16. СОПРОТИВЛЕНИE ПЕРЕДВИЖЕНИЮ МЕХАНИЗМА С ПРИВОДНЫМИ КОЛЕСАМИ, ВЫЗЫВАЕМОЕ ТРЕНИЕМ где Gгр. – вес груза; G – вес
- 17. ПОЛНОЕ СОПРОТИВЛЕНИЕ ПЕРЕДВИЖЕНИЮ ПРИ УСТАНОВИВШЕМСЯ ДВИЖЕНИИ где - на рельсовом пути; - для кранов, перемещаемых по
- 18. ВЕТРОВАЯ НАГРУЗКА НА КРАН где ωв - ветровая нагрузка на 1 м2 поверхности груза или крана.
- 19. ПОДБОР ЭЛЕКТРОДВИГАТЕЛЕЙ ДЛЯ МЕХАНИЗМОВ ПЕРЕДВИЖЕНИЯ Электродвигатели механизмов передвижения подбирают с учетом инерционных нагрузок по среднему значению
- 20. ПРОВЕРКА ЭЛЕКТРОДВИГАТЕЛЯ МЕХАНИЗМА ПЕРЕДВИЖЕНИЯ По времени пуска По ускорению По коэффициенту запаса сцепления где – суммарная
- 21. ОСОБЕННОСТИ РАСЧЕТА МЕХАНИЗМА ПЕРЕДВИЖЕНИЯ С КАНАТНОЙ ТЯГОЙ Для обеспечения сцепления тягового каната с барабаном необходимо соблюдение
- 22. ПОДБОР РЕДУКТОРОВ И МУФТ Для механизма передвижения применяются редуктора типа ВК; ВКУ; ЦЗВК и др. Их
- 24. Скачать презентацию
ПРОЕКТИРОВАНИЕ И РАСЧЕТ МЕХАНИЗМОВ ПЕРЕДВИЖЕНИЯ
Общие сведения
Механизм передвижения предназначен для перемещения груза
ПРОЕКТИРОВАНИЕ И РАСЧЕТ МЕХАНИЗМОВ ПЕРЕДВИЖЕНИЯ
Общие сведения
Механизм передвижения предназначен для перемещения груза

МЕХАНИЗМЫ ПЕРЕДВИЖЕНИЯ ДЛЯ РЕЛЬСОВОГО ПУТИ
МЕХАНИЗМЫ ПЕРЕДВИЖЕНИЯ ДЛЯ РЕЛЬСОВОГО ПУТИ

МЕХАНИЗМЫ ПЕРЕДВИЖЕНИЯ ДЛЯ БЕЗРЕЛЬСОВОГО ПУТИ
МЕХАНИЗМЫ ПЕРЕДВИЖЕНИЯ ДЛЯ БЕЗРЕЛЬСОВОГО ПУТИ

МЕХАНИЗМЫ ПЕРЕДВИЖЕНИЯ ДЛЯ КАНАТНОГО ПУТИ
МЕХАНИЗМЫ ПЕРЕДВИЖЕНИЯ ДЛЯ КАНАТНОГО ПУТИ

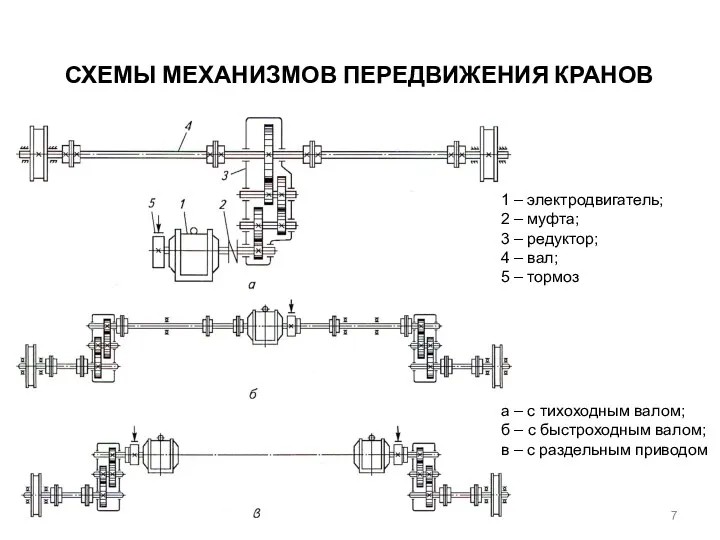
СХЕМЫ МЕХАНИЗМОВ ПЕРЕДВИЖЕНИЯ КРАНОВ
а – с тихоходным валом;
б – с быстроходным
СХЕМЫ МЕХАНИЗМОВ ПЕРЕДВИЖЕНИЯ КРАНОВ
а – с тихоходным валом;
б – с быстроходным

СХЕМА КАНАТНОГО МЕХАНИЗМА ПЕРЕДВИЖЕНИЯ
1 – барабан; 2 – тяговый канат; 3
СХЕМА КАНАТНОГО МЕХАНИЗМА ПЕРЕДВИЖЕНИЯ
1 – барабан; 2 – тяговый канат; 3
КОНСТРУКЦИЯ И РАСЧЕТ ХОДОВЫХ КОЛЕС
Зависит от типа грузоподъемной машины.
Колеса выполняют из
КОНСТРУКЦИЯ И РАСЧЕТ ХОДОВЫХ КОЛЕС
Зависит от типа грузоподъемной машины.
Колеса выполняют из
КОЛЕСА ТЕЛЕЖЕК БЕЗРЕЛЬСОВОГО ТРАНСПОРТА
а – гладкое металлическое; б – металлическое с
КОЛЕСА ТЕЛЕЖЕК БЕЗРЕЛЬСОВОГО ТРАНСПОРТА
а – гладкое металлическое; б – металлическое с
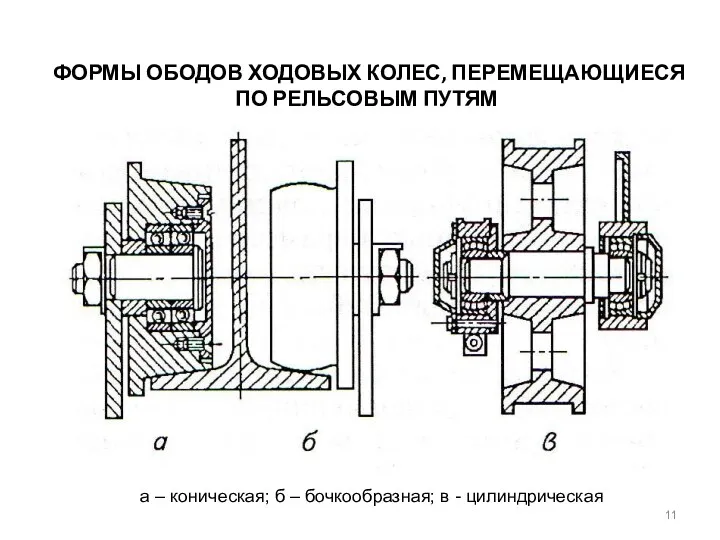
ФОРМЫ ОБОДОВ ХОДОВЫХ КОЛЕС, ПЕРЕМЕЩАЮЩИЕСЯ ПО РЕЛЬСОВЫМ ПУТЯМ
а – коническая; б
ФОРМЫ ОБОДОВ ХОДОВЫХ КОЛЕС, ПЕРЕМЕЩАЮЩИЕСЯ ПО РЕЛЬСОВЫМ ПУТЯМ
а – коническая; б
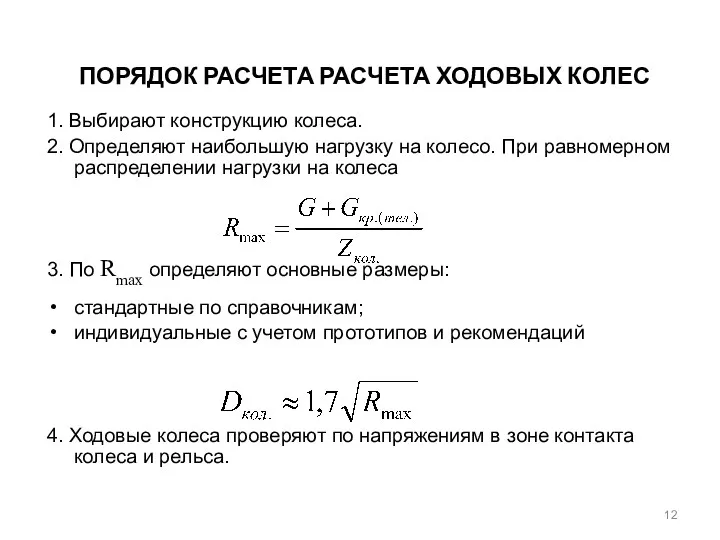
ПОРЯДОК РАСЧЕТА РАСЧЕТА ХОДОВЫХ КОЛЕС
1. Выбирают конструкцию колеса.
2. Определяют наибольшую нагрузку
ПОРЯДОК РАСЧЕТА РАСЧЕТА ХОДОВЫХ КОЛЕС
1. Выбирают конструкцию колеса.
2. Определяют наибольшую нагрузку
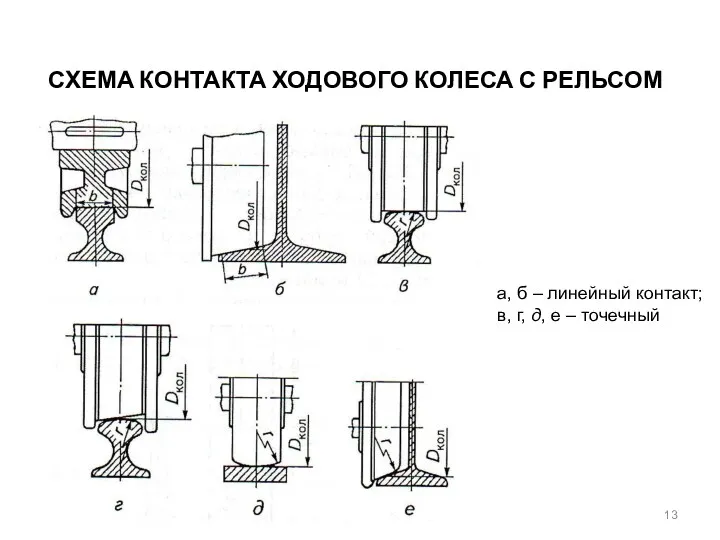
СХЕМА КОНТАКТА ХОДОВОГО КОЛЕСА С РЕЛЬСОМ
а, б – линейный контакт;
в, г,
СХЕМА КОНТАКТА ХОДОВОГО КОЛЕСА С РЕЛЬСОМ
а, б – линейный контакт;
в, г,
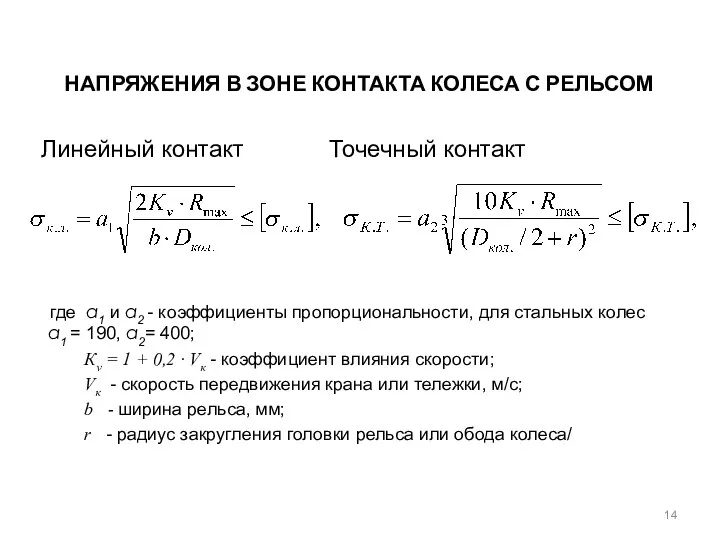
НАПРЯЖЕНИЯ В ЗОНЕ КОНТАКТА КОЛЕСА С РЕЛЬСОМ
Линейный контакт Точечный контакт
где a1 и
НАПРЯЖЕНИЯ В ЗОНЕ КОНТАКТА КОЛЕСА С РЕЛЬСОМ
Линейный контакт Точечный контакт
где a1 и
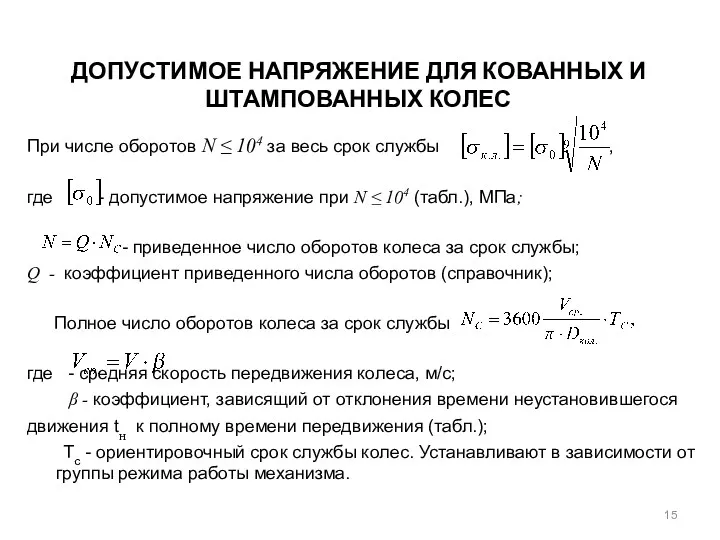
ДОПУСТИМОЕ НАПРЯЖЕНИЕ ДЛЯ КОВАННЫХ И ШТАМПОВАННЫХ КОЛЕС
При числе оборотов N ≤
ДОПУСТИМОЕ НАПРЯЖЕНИЕ ДЛЯ КОВАННЫХ И ШТАМПОВАННЫХ КОЛЕС
При числе оборотов N ≤
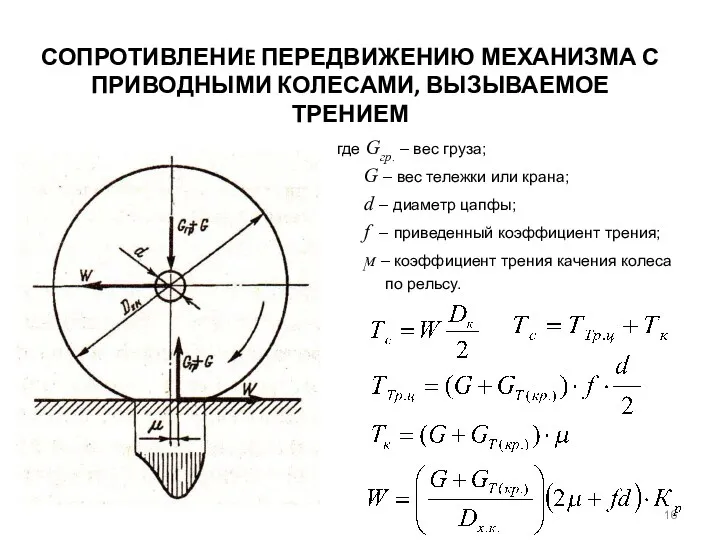
СОПРОТИВЛЕНИE ПЕРЕДВИЖЕНИЮ МЕХАНИЗМА С ПРИВОДНЫМИ КОЛЕСАМИ, ВЫЗЫВАЕМОЕ ТРЕНИЕМ
где Gгр. – вес груза;
G
СОПРОТИВЛЕНИE ПЕРЕДВИЖЕНИЮ МЕХАНИЗМА С ПРИВОДНЫМИ КОЛЕСАМИ, ВЫЗЫВАЕМОЕ ТРЕНИЕМ
где Gгр. – вес груза;
G
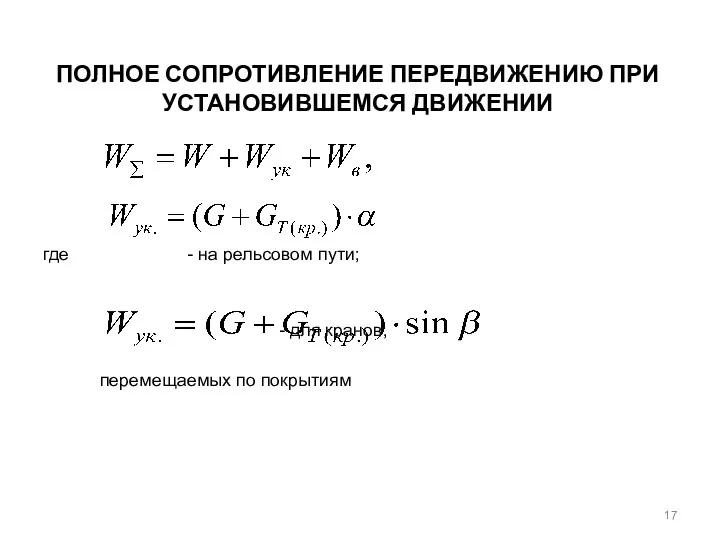
ПОЛНОЕ СОПРОТИВЛЕНИЕ ПЕРЕДВИЖЕНИЮ ПРИ УСТАНОВИВШЕМСЯ ДВИЖЕНИИ
где - на рельсовом пути;
- для кранов,
ПОЛНОЕ СОПРОТИВЛЕНИЕ ПЕРЕДВИЖЕНИЮ ПРИ УСТАНОВИВШЕМСЯ ДВИЖЕНИИ
где - на рельсовом пути;
- для кранов,
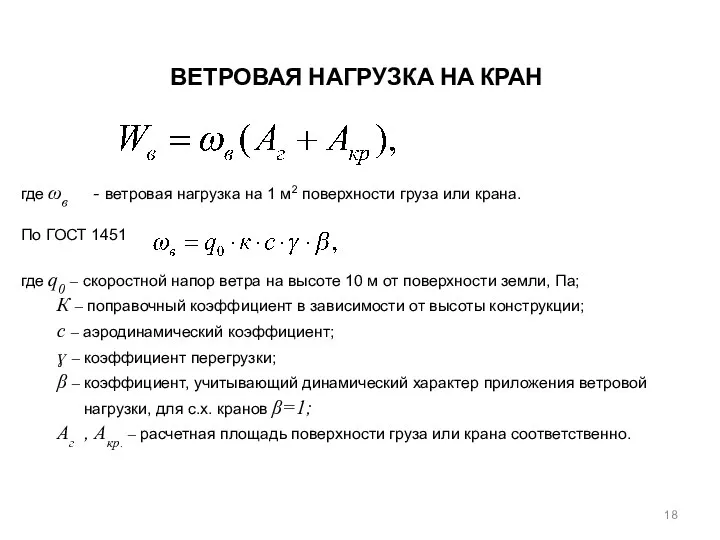
ВЕТРОВАЯ НАГРУЗКА НА КРАН
где ωв - ветровая нагрузка на 1 м2 поверхности груза
ВЕТРОВАЯ НАГРУЗКА НА КРАН
где ωв - ветровая нагрузка на 1 м2 поверхности груза
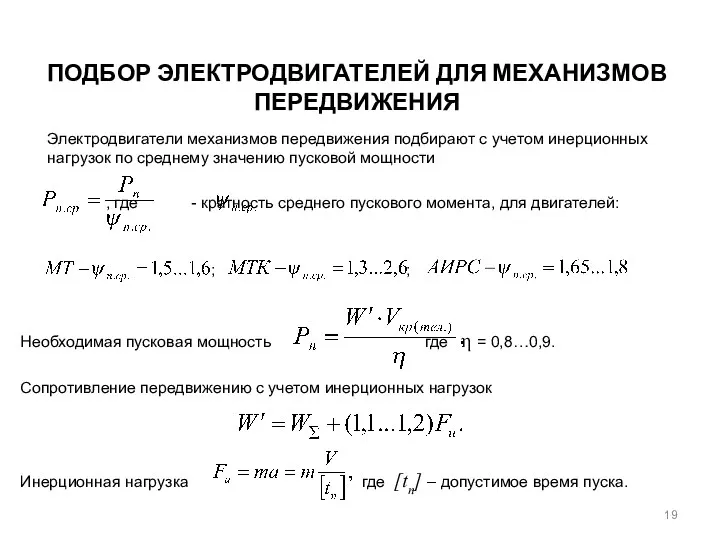
ПОДБОР ЭЛЕКТРОДВИГАТЕЛЕЙ ДЛЯ МЕХАНИЗМОВ ПЕРЕДВИЖЕНИЯ
Электродвигатели механизмов передвижения подбирают с учетом инерционных
ПОДБОР ЭЛЕКТРОДВИГАТЕЛЕЙ ДЛЯ МЕХАНИЗМОВ ПЕРЕДВИЖЕНИЯ
Электродвигатели механизмов передвижения подбирают с учетом инерционных
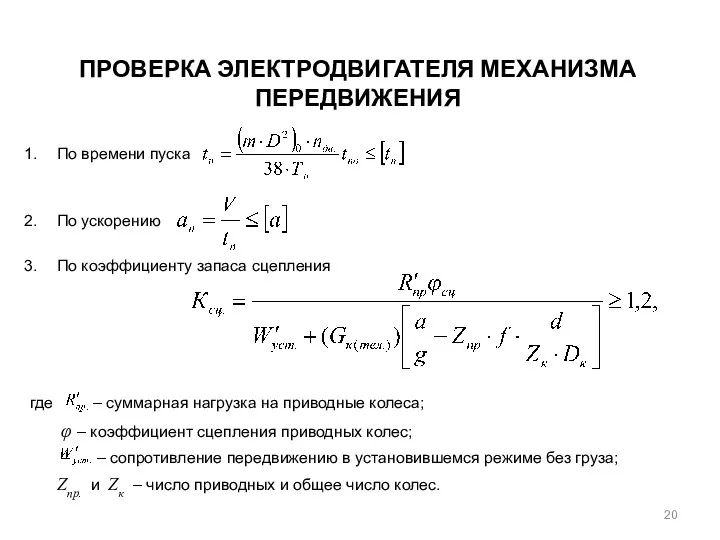
ПРОВЕРКА ЭЛЕКТРОДВИГАТЕЛЯ МЕХАНИЗМА ПЕРЕДВИЖЕНИЯ
По времени пуска
По ускорению
По коэффициенту запаса сцепления
где –
ПРОВЕРКА ЭЛЕКТРОДВИГАТЕЛЯ МЕХАНИЗМА ПЕРЕДВИЖЕНИЯ
По времени пуска
По ускорению
По коэффициенту запаса сцепления
где –
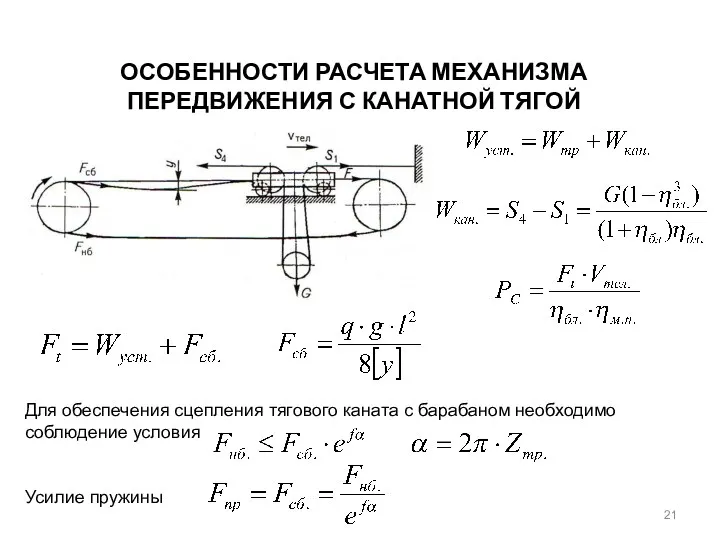
ОСОБЕННОСТИ РАСЧЕТА МЕХАНИЗМА ПЕРЕДВИЖЕНИЯ С КАНАТНОЙ ТЯГОЙ
Для обеспечения сцепления тягового каната
ОСОБЕННОСТИ РАСЧЕТА МЕХАНИЗМА ПЕРЕДВИЖЕНИЯ С КАНАТНОЙ ТЯГОЙ
Для обеспечения сцепления тягового каната
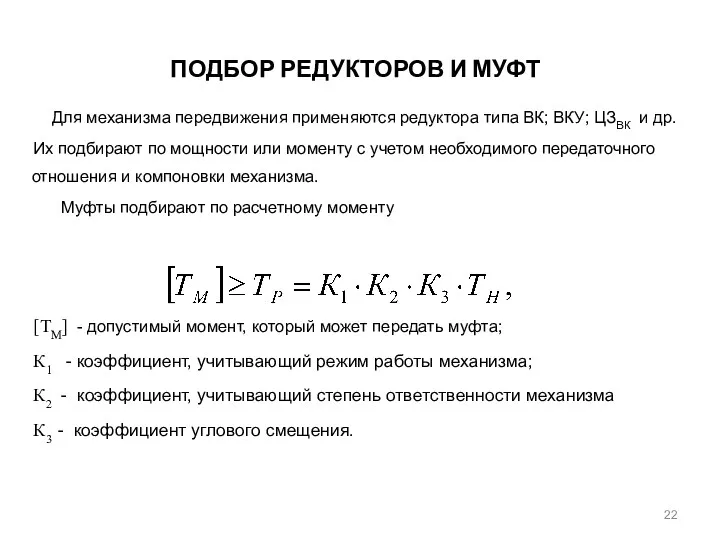
ПОДБОР РЕДУКТОРОВ И МУФТ
Для механизма передвижения применяются редуктора типа ВК; ВКУ;
ПОДБОР РЕДУКТОРОВ И МУФТ
Для механизма передвижения применяются редуктора типа ВК; ВКУ;
 Устройство скутера
Устройство скутера Сообщающиеся сосуды
Сообщающиеся сосуды Физические характеристики планет. Сила тяжести на других планетах
Физические характеристики планет. Сила тяжести на других планетах Ток в жидкостях. Закон электролиза. Гальваностегия. Гальванопластика
Ток в жидкостях. Закон электролиза. Гальваностегия. Гальванопластика Презентация к уроку физики Урок-смотр знаний учащихся по электробезопасности
Презентация к уроку физики Урок-смотр знаний учащихся по электробезопасности Контроль индивидуальных доз внешнего рентгеновского и гамма-излучения
Контроль индивидуальных доз внешнего рентгеновского и гамма-излучения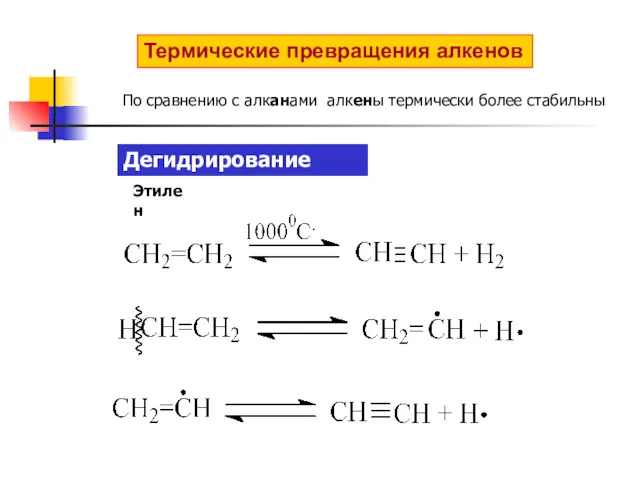 Термические превращения алкенов
Термические превращения алкенов Законы Ньютона
Законы Ньютона Расчет массы и объема тела по его плотности
Расчет массы и объема тела по его плотности Виды теплопередачи
Виды теплопередачи Получение неразрывных соединений путем пайки
Получение неразрывных соединений путем пайки Урок-обобщение Законы сохранения. Подготовка к ЕГЭ.
Урок-обобщение Законы сохранения. Подготовка к ЕГЭ. Механическое движение
Механическое движение Оптическая система. Лучевая и волновая оптика
Оптическая система. Лучевая и волновая оптика Курс Ядерная энергетика и атомные реакторы. Лекция 6. Замедление нейтронов. Кинематика
Курс Ядерная энергетика и атомные реакторы. Лекция 6. Замедление нейтронов. Кинематика Дифференциал
Дифференциал Передаточные функции и структурные схемы бокового движения самолета (лекция 9)
Передаточные функции и структурные схемы бокового движения самолета (лекция 9) Буксовый узел грузового вагона. Техническая ревизия буксового узла колесный пары РУ1-Ш
Буксовый узел грузового вагона. Техническая ревизия буксового узла колесный пары РУ1-Ш Кинетика химических реакций. (Лекция 8)
Кинетика химических реакций. (Лекция 8) Рентгеновское излучение
Рентгеновское излучение Закон Ома для полной цепи
Закон Ома для полной цепи Проектная деятельность, как важнейший фактор деятельностной педагогики
Проектная деятельность, как важнейший фактор деятельностной педагогики Законы фотоэффекта. Квантовые свойства вещества и света
Законы фотоэффекта. Квантовые свойства вещества и света Закон сохранения энергии в тепловых процессах
Закон сохранения энергии в тепловых процессах Явления смачивания
Явления смачивания 20230212_zvyozdnyy_chas
20230212_zvyozdnyy_chas Адаев Презхентация
Адаев Презхентация Презентация по теме Кинематика механического движения
Презентация по теме Кинематика механического движения