- Структура измерительных приборов и систем

Содержание
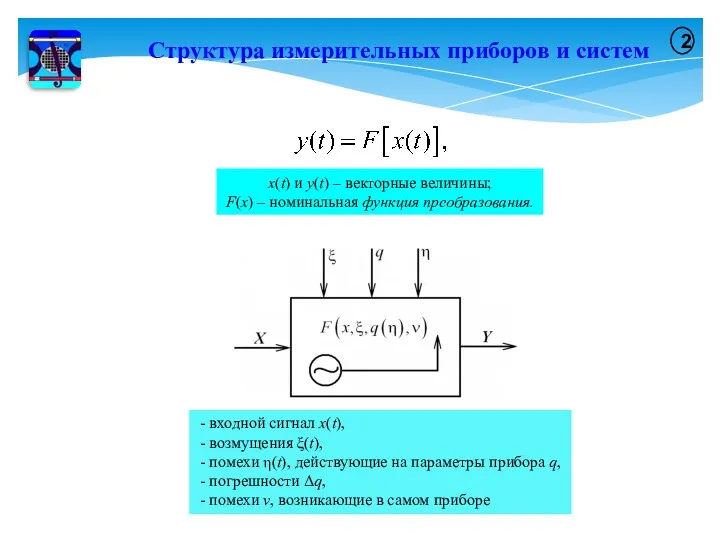
- 2. 2 Структура измерительных приборов и систем x(t) и y(t) – векторные величины; F(x) – номинальная функция
- 3. 3 Структура измерительных приборов и систем
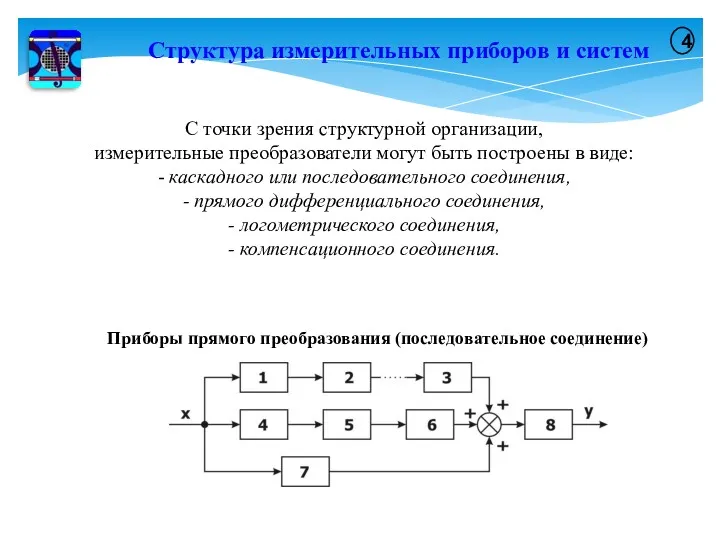
- 4. 4 С точки зрения структурной организации, измерительные преобразователи могут быть построены в виде: - каскадного или
- 5. 5 Структура измерительных приборов и систем Системы прямого преобразования (последовательное соединение) Достоинства: - простота реализации; -
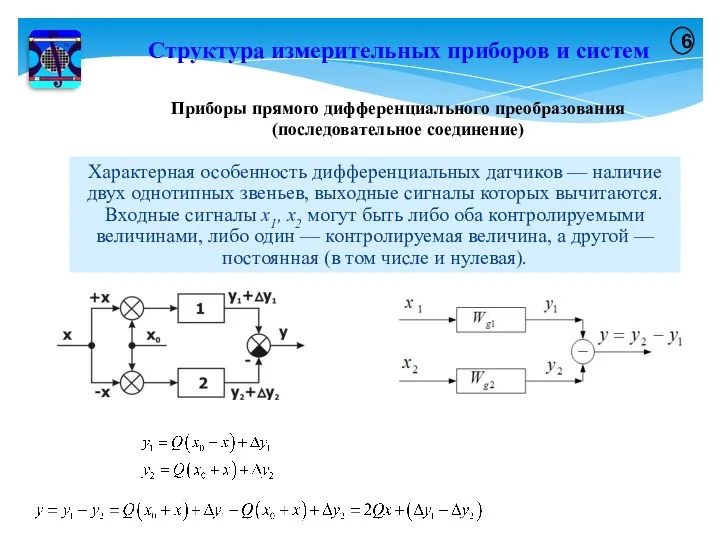
- 6. 6 Структура измерительных приборов и систем Приборы прямого дифференциального преобразования (последовательное соединение) Характерная особенность дифференциальных датчиков
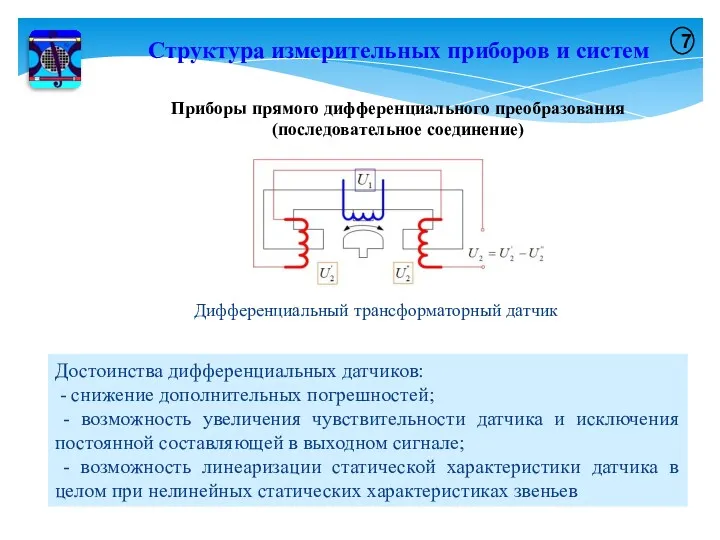
- 7. 7 Структура измерительных приборов и систем Приборы прямого дифференциального преобразования (последовательное соединение) Дифференциальный трансформаторный датчик Достоинства
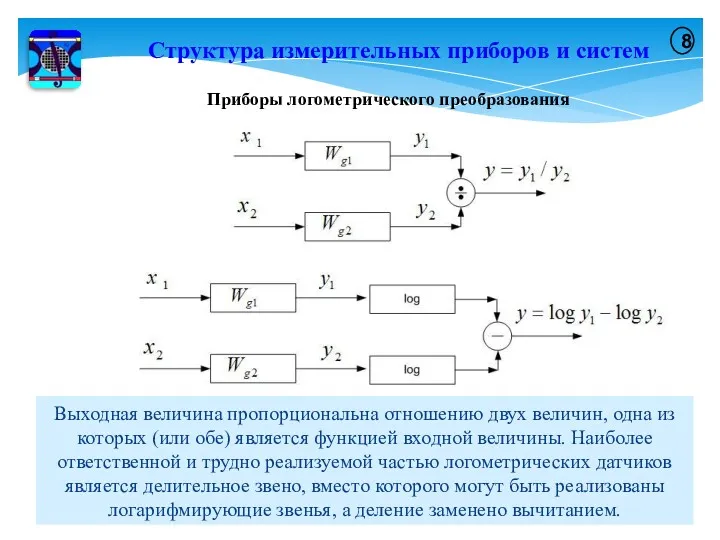
- 8. 8 Структура измерительных приборов и систем Приборы логометрического преобразования Выходная величина пропорциональна отношению двух величин, одна
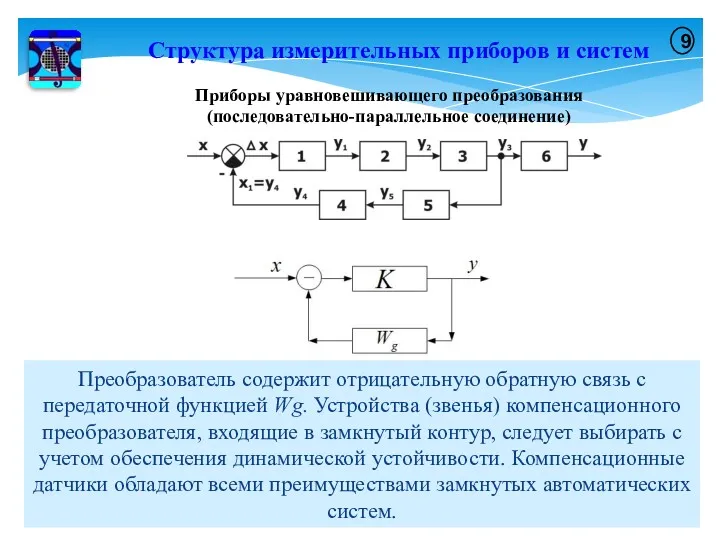
- 9. 9 Структура измерительных приборов и систем Преобразователь содержит отрицательную обратную связь с передаточной функцией Wg. Устройства
- 10. 10 Структура измерительных приборов и систем Типовые структуры измерительно-вычислительных систем (ИВС) Системы с параллельными измерительными каналами
- 11. 10 Структура измерительных приборов и систем Системы с параллельными измерительными каналами (системы параллельного действия или многоканальные
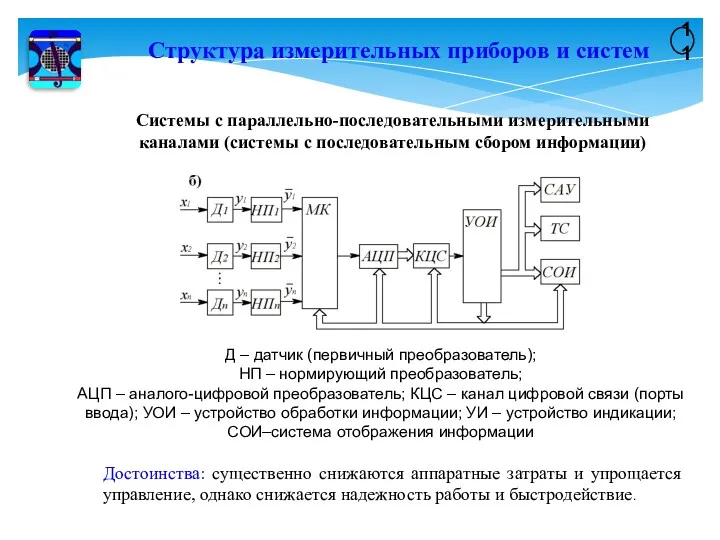
- 12. 11 Структура измерительных приборов и систем Системы с параллельно-последовательными измерительными каналами (системы с последовательным сбором информации)
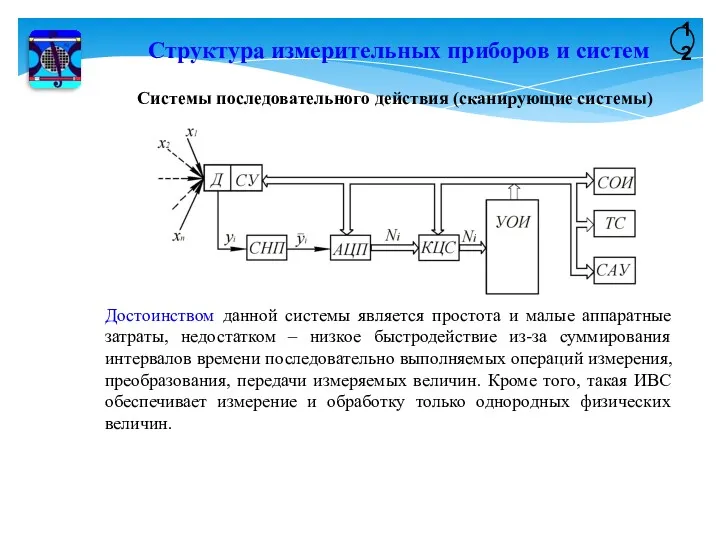
- 13. 12 Структура измерительных приборов и систем Системы последовательного действия (сканирующие системы) Достоинством данной системы является простота
- 15. Скачать презентацию
2
Структура измерительных приборов и систем
x(t) и y(t) – векторные величины;
F(x)
2
Структура измерительных приборов и систем
x(t) и y(t) – векторные величины;
F(x)

3
Структура измерительных приборов и систем
3
Структура измерительных приборов и систем
4
С точки зрения структурной организации,
измерительные преобразователи могут быть построены в
4
С точки зрения структурной организации,
измерительные преобразователи могут быть построены в
5
Структура измерительных приборов и систем
Системы прямого преобразования (последовательное соединение)
Достоинства:
- простота
5
Структура измерительных приборов и систем
Системы прямого преобразования (последовательное соединение)
Достоинства:
- простота
6
Структура измерительных приборов и систем
Приборы прямого дифференциального преобразования (последовательное соединение)
Характерная особенность
6
Структура измерительных приборов и систем
Приборы прямого дифференциального преобразования (последовательное соединение)
Характерная особенность
7
Структура измерительных приборов и систем
Приборы прямого дифференциального преобразования (последовательное соединение)
Дифференциальный трансформаторный
7
Структура измерительных приборов и систем
Приборы прямого дифференциального преобразования (последовательное соединение)
Дифференциальный трансформаторный
8
Структура измерительных приборов и систем
Приборы логометрического преобразования
Выходная величина пропорциональна отношению двух
8
Структура измерительных приборов и систем
Приборы логометрического преобразования
Выходная величина пропорциональна отношению двух
9
Структура измерительных приборов и систем
Преобразователь содержит отрицательную обратную связь с передаточной
9
Структура измерительных приборов и систем
Преобразователь содержит отрицательную обратную связь с передаточной

10
Структура измерительных приборов и систем
Типовые структуры
измерительно-вычислительных систем (ИВС)
Системы с параллельными
10
Структура измерительных приборов и систем
Типовые структуры
измерительно-вычислительных систем (ИВС)
Системы с параллельными
10
Структура измерительных приборов и систем
Системы с параллельными измерительными каналами (системы параллельного
10
Структура измерительных приборов и систем
Системы с параллельными измерительными каналами (системы параллельного
11
Структура измерительных приборов и систем
Системы с параллельно-последовательными измерительными каналами (системы с
11
Структура измерительных приборов и систем
Системы с параллельно-последовательными измерительными каналами (системы с
12
Структура измерительных приборов и систем
Системы последовательного действия (сканирующие системы)
Достоинством данной системы
12
Структура измерительных приборов и систем
Системы последовательного действия (сканирующие системы)
Достоинством данной системы
 Формирование познавательных интересов у учащихся на уроках физики
Формирование познавательных интересов у учащихся на уроках физики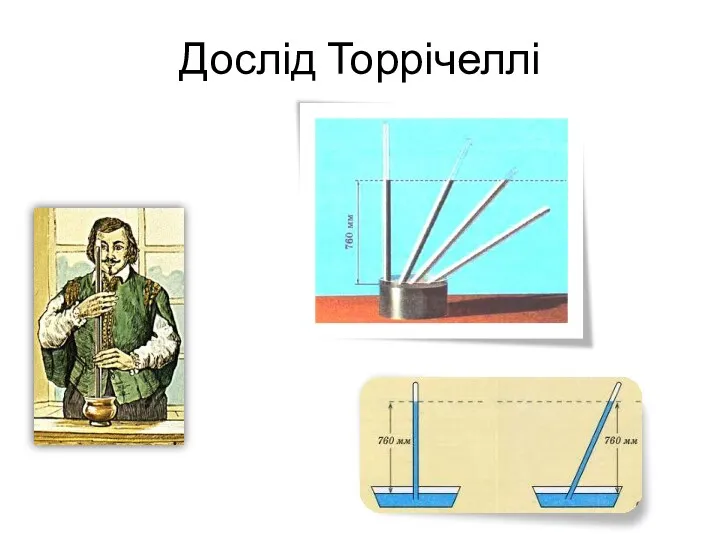 Дослід Торрічеллі
Дослід Торрічеллі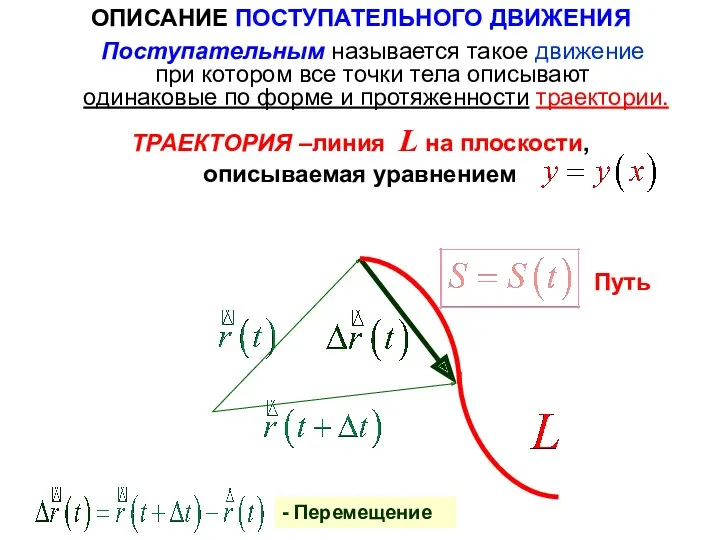 Описание поступательного движения
Описание поступательного движения Прибор для демонстрации графиков электромагнитных колебаний
Прибор для демонстрации графиков электромагнитных колебаний Механические напряжения и деформации в тонких пленках
Механические напряжения и деформации в тонких пленках Решение задач по теме Строение атома, радиоактивные превращения
Решение задач по теме Строение атома, радиоактивные превращения Строение атома
Строение атома Застосування електричного струму в газах
Застосування електричного струму в газах Capacitors
Capacitors Кинематика движения материальной точки
Кинематика движения материальной точки Вплив фізики на суспільний розвиток та науково-технічний прогрес
Вплив фізики на суспільний розвиток та науково-технічний прогрес Молекулярная физика. Основы термодинамики. Элементы молекулярно-кинетической теории. Уравнение состояния идеального газа
Молекулярная физика. Основы термодинамики. Элементы молекулярно-кинетической теории. Уравнение состояния идеального газа Рідкі кристали та їх застосування
Рідкі кристали та їх застосування Датчики температуры
Датчики температуры Дисперсия света
Дисперсия света Всероссийский турнир юных физиков. Катание на диске
Всероссийский турнир юных физиков. Катание на диске Работа силы тяжести и упругости
Работа силы тяжести и упругости Солнечная батарея
Солнечная батарея Акустоелектроніка. Основні принципи та уявлення
Акустоелектроніка. Основні принципи та уявлення История появления квадрокоптеров
История появления квадрокоптеров Внешний вид РУ и сборка 0,4/0,23 кВ
Внешний вид РУ и сборка 0,4/0,23 кВ Идеальный газ. Давление газа. Средняя кинетическая энергия поступательного движения молекул. Концентрация молекул
Идеальный газ. Давление газа. Средняя кинетическая энергия поступательного движения молекул. Концентрация молекул Молекулярно-кинетическая теория газов. (Тема 10)
Молекулярно-кинетическая теория газов. (Тема 10) Люмінесценція. Фотопровідність. Фотоефект зовнішній і внутрішній. Відхилення від законів фотоефекту. (Тема 3)
Люмінесценція. Фотопровідність. Фотоефект зовнішній і внутрішній. Відхилення від законів фотоефекту. (Тема 3) Базовое техническое обслуживание и анализ технического состояния системы водоснабжения самолета RRJ-95
Базовое техническое обслуживание и анализ технического состояния системы водоснабжения самолета RRJ-95 Презентация к уроку: Кипение, удельная теплота парообразования и конденсации
Презентация к уроку: Кипение, удельная теплота парообразования и конденсации Строение и свойства вещества
Строение и свойства вещества Проектирование фрагментов учебного занятия с использованием ЦОР на уроках физики
Проектирование фрагментов учебного занятия с использованием ЦОР на уроках физики