- История появления квадрокоптеров

Содержание
- 2. ОПРЕДЕЛЕНИЕ Под квадрокоптером понимается вертолет, имеющий четыре несущих винта, разнесенных с помощью балок относительно центра корпуса.
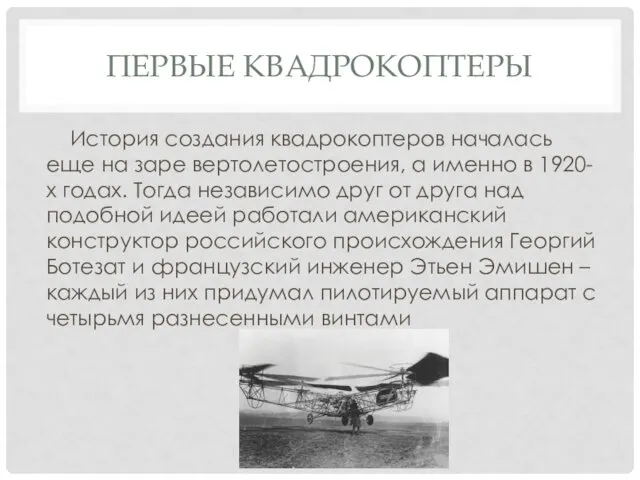
- 3. ПЕРВЫЕ КВАДРОКОПТЕРЫ История создания квадрокоптеров началась еще на заре вертолетостроения, а именно в 1920-х годах. Тогда
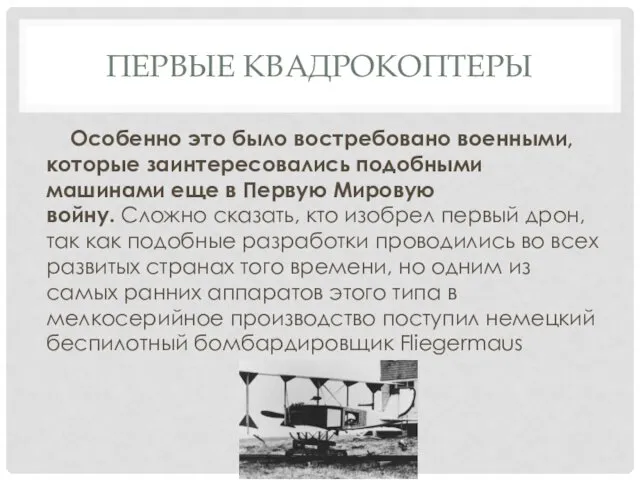
- 4. ПЕРВЫЕ КВАДРОКОПТЕРЫ Особенно это было востребовано военными, которые заинтересовались подобными машинами еще в Первую Мировую войну.
- 5. ПОЯВЛЕНИЕ СОВРЕМЕННЫХ КВАДРОКОПТЕРОВ В своем современном виде первые в мире квадрокоптеры появились в 2006 году с
- 6. ПОЯВЛЕНИЕ СОВРЕМЕННЫХ КВАДРОКОПТЕРОВ В дальнейшем рынок четырехвинтовых дронов пошел по двум направлениям: создание полностью готовых к
- 8. Скачать презентацию
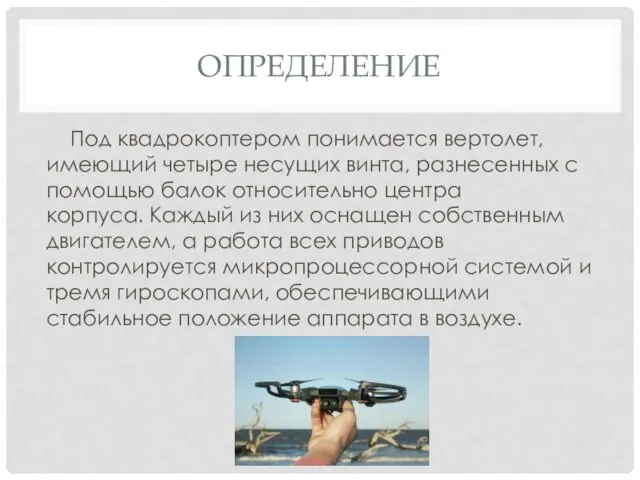
ОПРЕДЕЛЕНИЕ
Под квадрокоптером понимается вертолет, имеющий четыре несущих винта, разнесенных с помощью
ОПРЕДЕЛЕНИЕ
Под квадрокоптером понимается вертолет, имеющий четыре несущих винта, разнесенных с помощью
ПЕРВЫЕ КВАДРОКОПТЕРЫ
История создания квадрокоптеров началась еще на заре вертолетостроения, а именно
ПЕРВЫЕ КВАДРОКОПТЕРЫ
История создания квадрокоптеров началась еще на заре вертолетостроения, а именно
ПЕРВЫЕ КВАДРОКОПТЕРЫ
Особенно это было востребовано военными, которые заинтересовались подобными машинами еще
ПЕРВЫЕ КВАДРОКОПТЕРЫ
Особенно это было востребовано военными, которые заинтересовались подобными машинами еще

ПОЯВЛЕНИЕ СОВРЕМЕННЫХ КВАДРОКОПТЕРОВ
В своем современном виде первые в мире квадрокоптеры появились
ПОЯВЛЕНИЕ СОВРЕМЕННЫХ КВАДРОКОПТЕРОВ
В своем современном виде первые в мире квадрокоптеры появились
ПОЯВЛЕНИЕ СОВРЕМЕННЫХ КВАДРОКОПТЕРОВ
В дальнейшем рынок четырехвинтовых дронов пошел по двум направлениям:
создание
ПОЯВЛЕНИЕ СОВРЕМЕННЫХ КВАДРОКОПТЕРОВ
В дальнейшем рынок четырехвинтовых дронов пошел по двум направлениям:
создание
 Корабельные гироскопические системы. (Тема 2)
Корабельные гироскопические системы. (Тема 2) Взаимозаменяемость и нормирование точности
Взаимозаменяемость и нормирование точности Точность и погрешность измерений
Точность и погрешность измерений Основы теории подобия
Основы теории подобия Развитие средств связи
Развитие средств связи Тренажер по физике. Формулы.8 класс
Тренажер по физике. Формулы.8 класс Урок Обобщение материала по теме Силы в природе. 7 класс.
Урок Обобщение материала по теме Силы в природе. 7 класс. Плотность вещества
Плотность вещества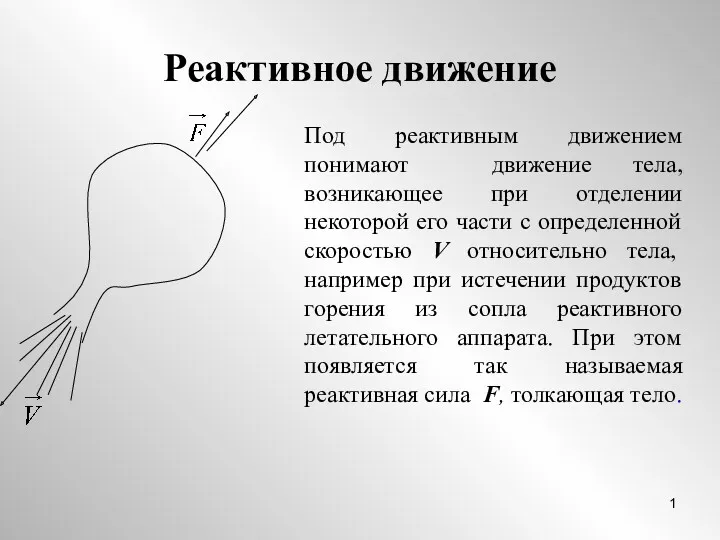 Реактивное движение
Реактивное движение Пожежні автомобілі аеродромної служби
Пожежні автомобілі аеродромної служби Урок-презентация по теме Сила трения
Урок-презентация по теме Сила трения Поршневой жидкостный насос. Гидравлический пресс
Поршневой жидкостный насос. Гидравлический пресс Взаимодействие света с веществом. Лекция №8
Взаимодействие света с веществом. Лекция №8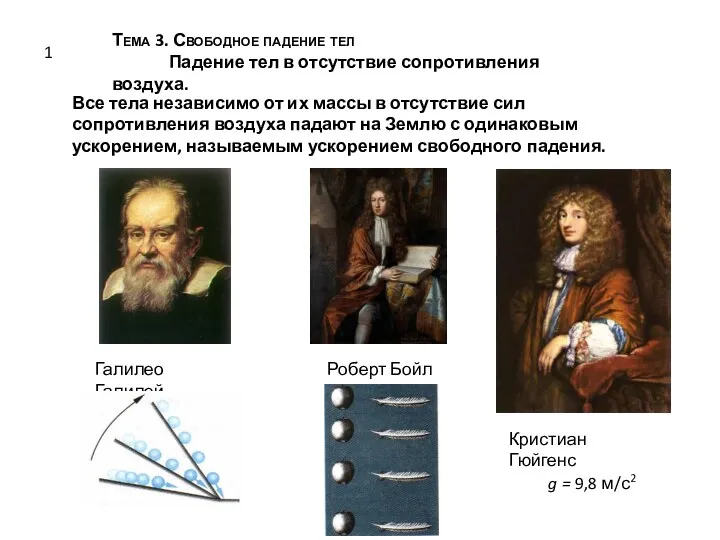 Свободное падение тел
Свободное падение тел Управление колебаниями системы маятник-тележка с приводом методом скоростного биградиента
Управление колебаниями системы маятник-тележка с приводом методом скоростного биградиента Плотность вещества
Плотность вещества Магнитное поле и его характеристики
Магнитное поле и его характеристики Розв'язування задач з теми Сили в природі
Розв'язування задач з теми Сили в природі Испарение и конденсация. Кипение жидкости
Испарение и конденсация. Кипение жидкости Акустика как часть физики
Акустика как часть физики Какие батарейки лучше
Какие батарейки лучше Колебательные цепи при гармонических воздействиях. Лекция 5
Колебательные цепи при гармонических воздействиях. Лекция 5 Дифракция
Дифракция Опыт Карла Рикке
Опыт Карла Рикке Акустика. Слух и его свойства
Акустика. Слух и его свойства способы изм. вн. эн
способы изм. вн. эн Расчет переходных процессов в электрических цепях классическим методом
Расчет переходных процессов в электрических цепях классическим методом Плоские электромагнитные волны. Устройство и параметры однородных линий передач
Плоские электромагнитные волны. Устройство и параметры однородных линий передач