- Введение. Основные термины, понятия и определения теории механизмов и машин

Содержание
- 2. Уважаемые коллеги! Студенты часто называют дисциплину «Теория механизмов и машин», сокращенное название - «ТММ», как «Тут
- 3. Список использованных источников: 1. Артоболевский И.И. Теория механизмов и машин: Учеб. для втузов. – 6-е изд.,
- 4. 1.ВВЕДЕНИЕ Основные термины, понятия и определения ТММ Зачем студенту необходима дисциплина ТММ.docx
- 5. Теория механизмов и машин - это наука о строении, кинематике, динамике механизмов и машин при их
- 6. Структура механизма (строение) – изучает способ его образования
- 7. Кинематика механизма – изучает движение его звеньев без учета сил
- 8. Динамика механизма – изучает движение его звеньев с учетом сил, вызывающих это движение
- 9. Анализ – определение свойств (параметров) известного механизма
- 10. Синтез – создание нового механизма с заданными свойствами (параметрами)
- 11. Машина - это устройство, которое предназначено для преобразования: энергии, материалов, информации
- 12. Классификация машин по функциям: 1.энергетические - ДВС, турбины, 2.технологические - станок, 3.транспортные - автомобили, 4.кибернетические –
- 13. Энергетические машины
- 14. Технологические машины
- 15. Транспортные машины
- 16. Кибернетические машины
- 17. Машина состоит из механизмов Механизм - это система тел, предназначенных для преобразования одного вида движения в
- 18. Механизм преобразует поступательное движение во вращательное
- 19. Механизм преобразует вращательное движение во вращательное
- 20. Механизм преобразует вращательное движение в поступательное
- 21. Механизм состоит из звеньев: Стойка - неподвижное звено любого механизма. Кривошип - совершает вращательное движение (полный
- 22. Звенья в механизме соединяются между собой подвижным соединением, которое называется кинематической парой
- 23. По характеру соприкосновения звеньев, кинематические пары бывают высшие и низшие. По количеству ограничений, наложенных на относительное
- 24. Кинематические цепи Любой механизм представляет собой кинематическую цепь из звеньев, одно из которых является неподвижным (стойка),
- 25. Степень подвижности плоских механизмов Под степенью подвижности понимается число степеней свободы всех подвижных звеньев механизма относительно
- 26. W ═ 3·n ― 2·p5 ― p4 = 3х3 – 2х4 – 0 = 1 n
- 27. W ═ 3·n ― 2·p5 ― p4 = 3х4 – 2х5 – 0 = 2 n
- 28. При проектировании механизмов для повышения жёсткости конструкции и улучшения условий передачи сил вводят пассивные связи, то
- 29. W ═ 3·n ― 2·p5 ― p4 = 3х4 – 2х6 – 0 = 0 n
- 30. Лишние степени свободы Это дополнительное движение звена, используют для сокращения потерь при передаче мощности, повышения механического
- 31. W ═ 3·n ― 2·p5 ― p4 = 3х3 – 2х3 – 1 = 2 n
- 32. Замена в механизмах высших кинематических пар на низшие Чтобы облегчить расчеты механизма, конструктор старается заменить высшие
- 33. 2.СТРУКТУРНЫЙ АНАЛИЗ МЕХАНИЗМА Цель: определить класс механизма
- 34. Как образуются новые плоские механизмы ? На этот вопрос ответил в 1914 году русский ученый Ассур
- 35. Принцип образования плоских механизмов, предложенный Ассуром Л.В. К начальному механизму последовательно присоединяются группы Ассура 2-го, 3-го
- 36. Контрольные вопросы по темам: «Введение» и «Структурный анализ механизма» Контрольные вопросы по теме Введение и Структурный
- 37. Тестовое задание по теме «Структурный анализ механизма» 1. Провести структурный анализ механизма плунжерного насоса. плунжерный насос.mp4
- 38. Защита тестового задания по темам: «Введение» и «Структурный анализ механизма» 1. Оформить тестовое задание в соответствии
- 39. Благодарю за внимание!
- 40. 3.КИНЕМАТИЧЕСКИЙ АНАЛИЗ МЕХАНИЗМА Цель: изучить движение звеньев механизма без учета сил
- 41. Задачи кинематического анализа механизма: 1. Определение перемещений. 2. Определение скоростей. 3. Определение ускорений.
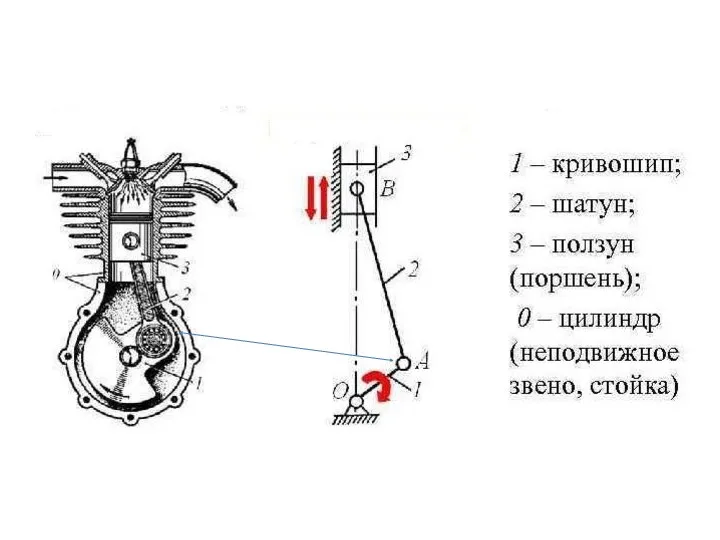
- 42. 1. Определение перемещений звеньев механизма Перемещения звеньев механизма определяют для того, чтобы можно было изготовить корпус
- 44. Алгоритм определения перемещений звеньев механизма: 1. Проводим структурный анализ механизма, определяем его класс, раскладывая механизм на
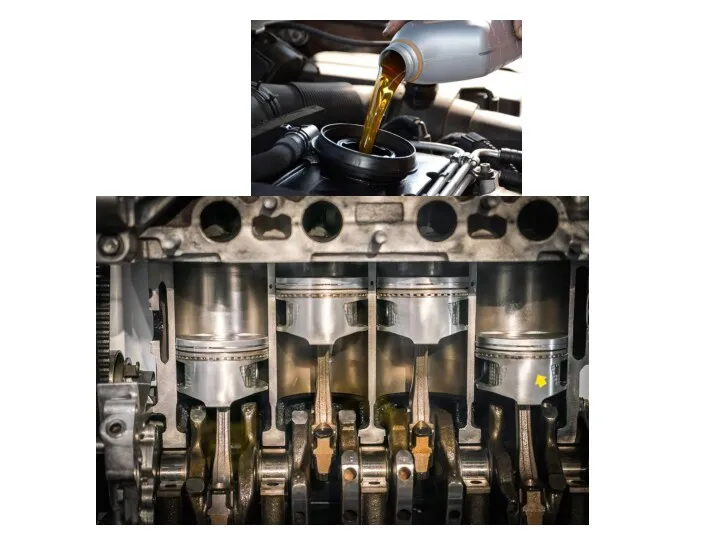
- 45. 2. Определение скоростей звеньев механизма Скорости звеньев механизма определяют с целью выбора типа масла. Например, чем
- 47. Методы определения скоростей и ускорений На практике применяют несколько методов: 1. графический, 2. графоаналитический (метод планов
- 48. Графоаналитический метод называют методом планов скоростей и ускорений. Особенности этого метода: он не трудоемкий, простой, понятный
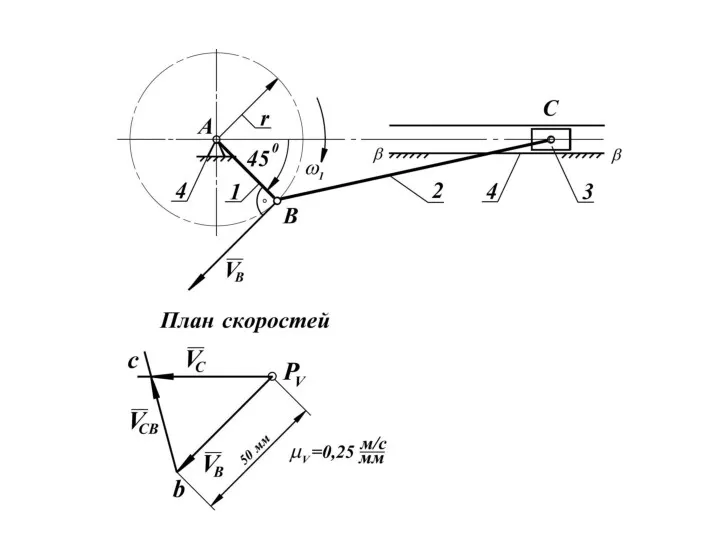
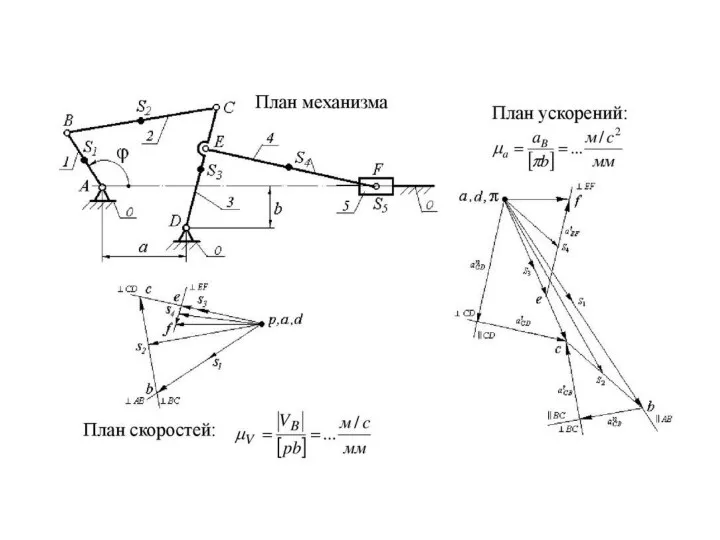
- 49. Алгоритм определения скоростей звеньев механизма графоаналитическим методом 1. Провести структурный анализ механизма. 2. Начертить кинематическую схему
- 51. 3. Определение ускорений звеньев механизма Ускорения звеньев механизма определяют для того, чтобы при силовом анализе механизма
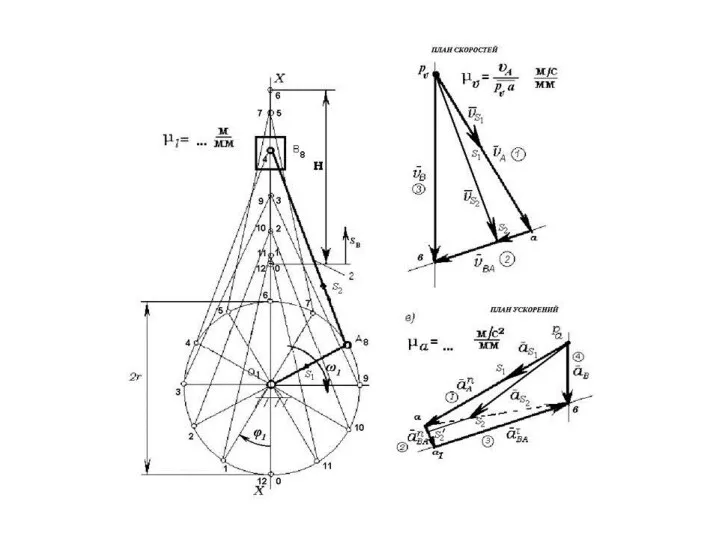
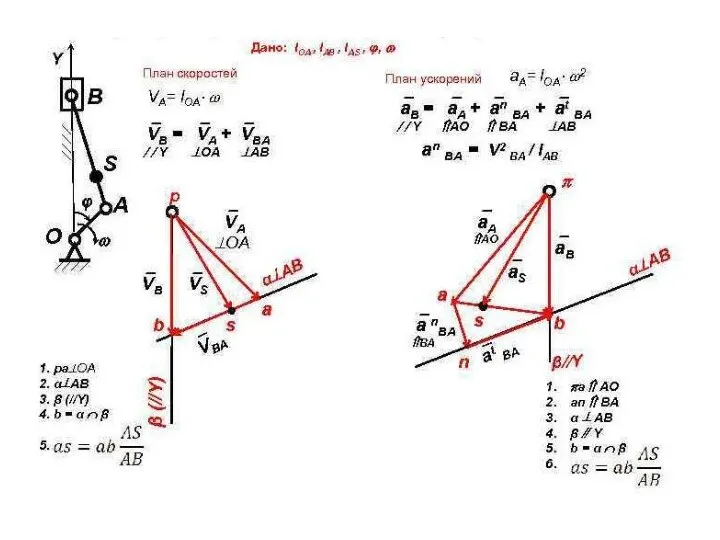
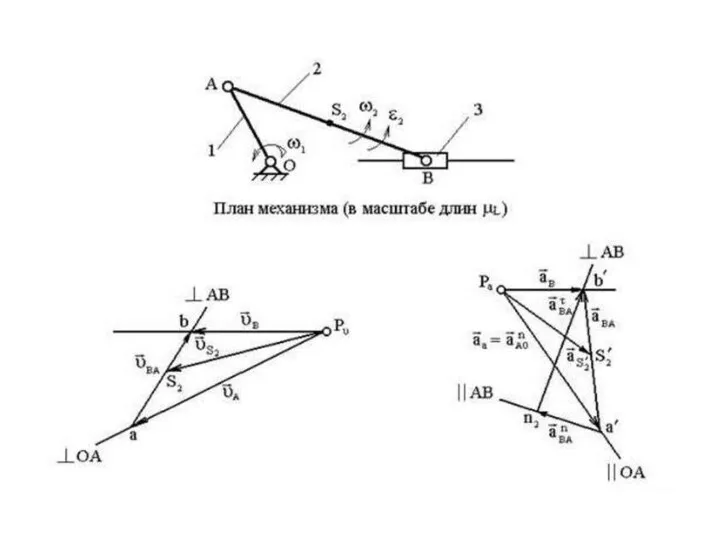
- 52. Алгоритм определения ускорений звеньев механизма 1. Провести структурный анализ механизма (мы уже сделали). 2. Начертить кинематическую
- 57. Графический метод кинематического анализа механизма Преимущество графического метода заключается в наглядности и простоте. Он хорош для
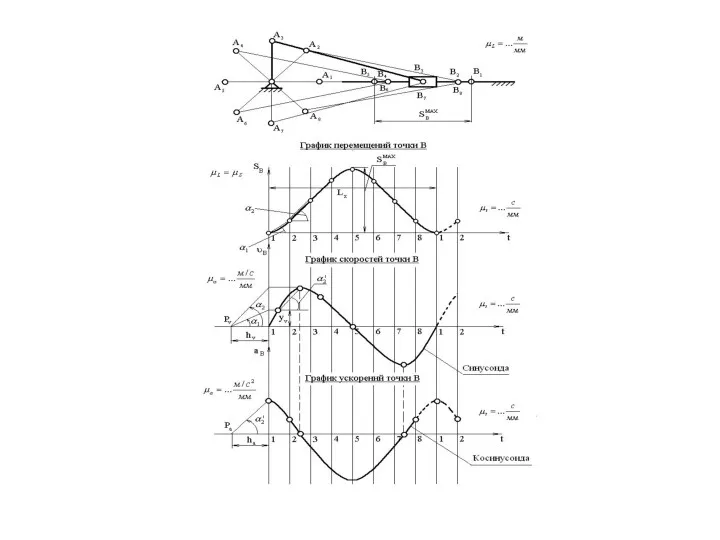
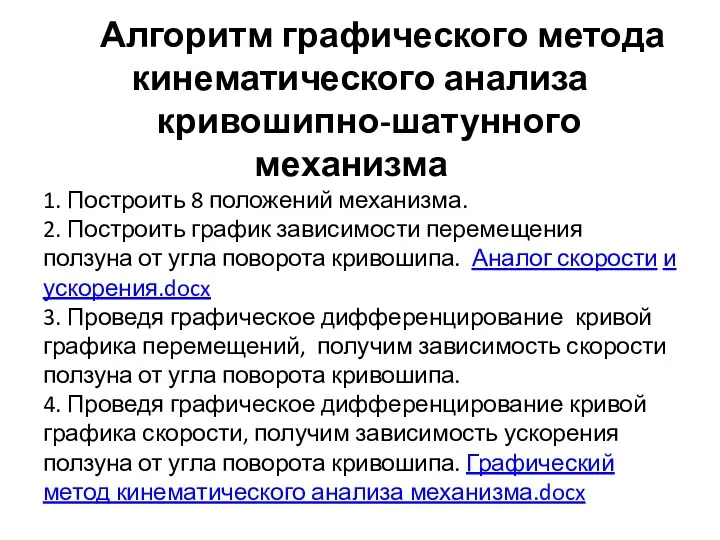
- 59. Алгоритм графического метода кинематического анализа кривошипно-шатунного механизма 1. Построить 8 положений механизма. 2. Построить график зависимости
- 60. Контрольные вопросы по теме «Кинематический анализ механизма» Контрольные вопросы по теме Кинематический анализ механизма.docx
- 61. Тестовое задание по теме «Кинематический анализ механизма» 1. Построить кинематическую схему механизма в 8-ми положениях. 2.
- 62. Защита тестового задания по теме «Кинематический анализ механизма» 1. Оформить тестовое задание в соответствии с требованиями
- 63. Благодарю за внимание!
- 64. 4.ДИНАМИЧЕСКИЙ АНАЛИЗ МЕХАНИЗМА Цель – изучить движение звеньев механизма с учетом сил, вызывающих это движение.
- 65. Задачи динамического анализа механизма: 1. Силовой анализ механизма. 2. Динамика механизма.
- 66. Силовой анализ механизма посвящен определению реакций в кинематических парах и определению уравновешивающей силы. При этом делается
- 67. Алгоритм силового анализа механизма: 1. Провести структурный анализ механизма. 2. Провести кинематический анализ механизма. 3. Провести
- 68. 2. Динамика механизма посвящена определению истинного закона движения ведущего звена механизма в зависимости от заданных внешних
- 69. Контрольные вопросы по теме «Динамический анализ механизма» Контрольные вопросы по теме Динамический анализ механизма.docx
- 70. Тестовое задание по теме «Динамический анализ механизма» 1. Показать на схеме механизма направления сил инерции звеньев
- 71. Защита тестового задания по теме «Динамический анализ механизма» 1. Оформить тестовое задание в соответствии с требованиями
- 72. Благодарю за внимание.
- 73. 5.МЕХАНИЗМЫ ПЕРЕДАЧ 1. Анализ (кинематический). 2. Синтез по кинематическим параметрам.
- 74. 1. Кинематический анализ механизмов передач. Механизмы передач – это механизмы для воспроизведения вращательного движения с постоянным
- 76. 1.1. Зубчатые механизмы передач
- 77. 1.2. Зубчатые механизмы передач
- 78. 1.3. Зубчатые механизмы передач
- 79. 1.4. Передаточное отношение зубчатых механизмов передач Знак передаточного отношения определяется для плоских зубчатых механизмов, а для
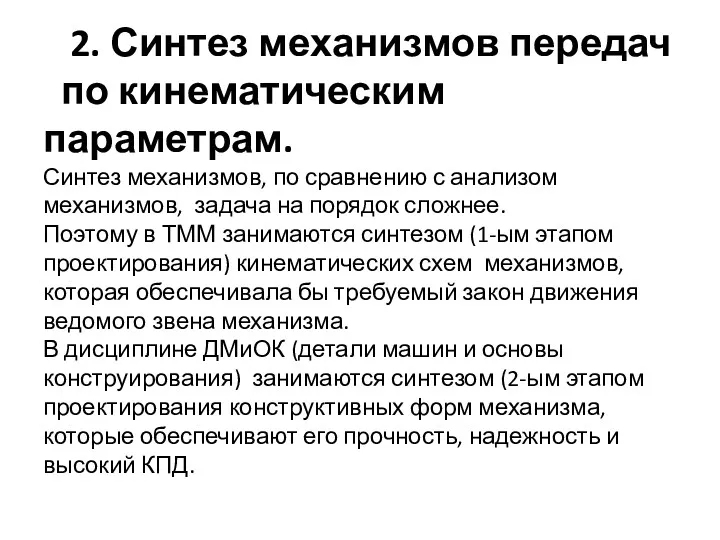
- 80. 2. Синтез механизмов передач по кинематическим параметрам. Синтез механизмов, по сравнению с анализом механизмов, задача на
- 81. 2.1. Задачи синтеза механизма: 1. Преобразование вращательного движения во вращательное. 2. Преобразование вращательного движения в поступательное.
- 82. Преобразование вращательного движения во вращательное
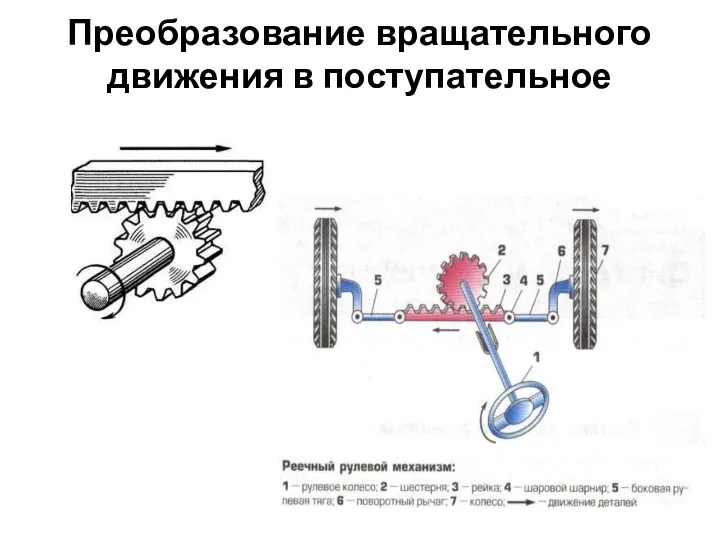
- 83. Преобразование вращательного движения в поступательное
- 84. Преобразование поступательного движения в поступательное
- 85. Воспроизведение требуемой траектории движения звена
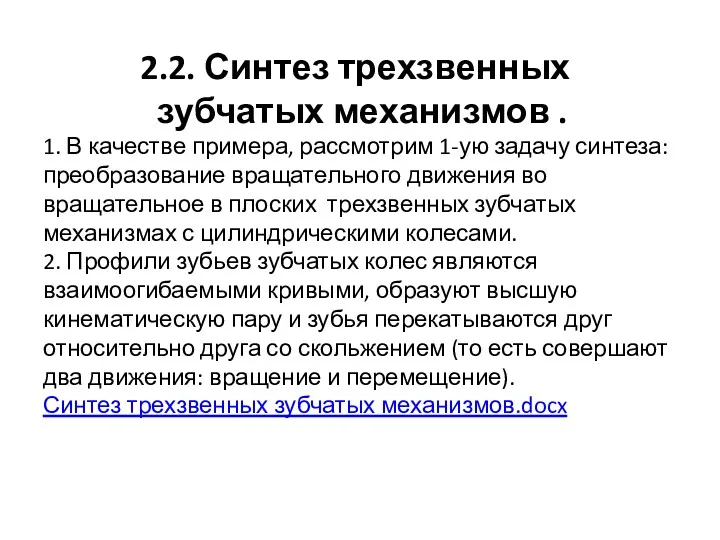
- 86. 2.2. Синтез трехзвенных зубчатых механизмов . 1. В качестве примера, рассмотрим 1-ую задачу синтеза: преобразование вращательного
- 87. Контрольные вопросы по теме «Механизмы передач» Контрольные вопросы по теме Механизмы передач.docx
- 88. Тестовое задание по теме «Механизмы передач» 1. Определить передаточное отношение многоступенчатого редуктора, если известны числа зубьев
- 89. Защита тестового задания по теме «Механические передачи» 1. Оформить тестовое задание в соответствии с требованиями стандарта
- 90. 6.КУЛАЧКОВЫЕ МЕХАНИЗМЫ 1. Анализ (кинематический). 2. Синтез по кинематическим параметрам.
- 91. 1. Кинематический анализ кулачковых механизмов. Кинематический анализ кулачковых механизмов.docx
- 92. 2. Синтез кулачковых механизмов по кинематическим параметрам. Дополнительные материалы\Синтез кулачковых механизмов по кинематическим параметрам.docx
- 93. Контрольные вопросы по теме «Кулачковые механизмы» Контрольные вопросы по теме Кулачковые механизы.docx
- 94. Защита тестового задания по теме «Кулачковые механизмы» 1. Устно ответить на три контрольных вопроса по теме
- 95. Уважаемые коллеги! Если Вы успешно защитили тестовые задания по всем темам, поздравляю Вас! Вы получаете отметку
- 97. Скачать презентацию
Уважаемые коллеги!
Студенты часто называют дисциплину «Теория механизмов и машин», сокращенное название
Уважаемые коллеги! Студенты часто называют дисциплину «Теория механизмов и машин», сокращенное название
Список использованных источников:
1. Артоболевский И.И. Теория механизмов и машин: Учеб.
Список использованных источников: 1. Артоболевский И.И. Теория механизмов и машин: Учеб.
1.ВВЕДЕНИЕ
Основные термины, понятия и определения ТММ
Зачем студенту необходима дисциплина ТММ.docx
1.ВВЕДЕНИЕ
Основные термины, понятия и определения ТММ
Зачем студенту необходима дисциплина ТММ.docx
Теория механизмов и машин - это наука о строении, кинематике, динамике
Теория механизмов и машин - это наука о строении, кинематике, динамике
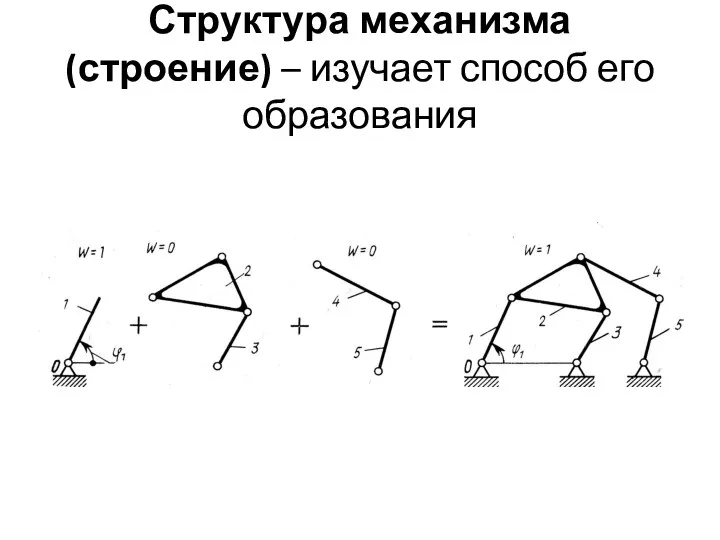
Структура механизма (строение) – изучает способ его образования
Структура механизма (строение) – изучает способ его образования
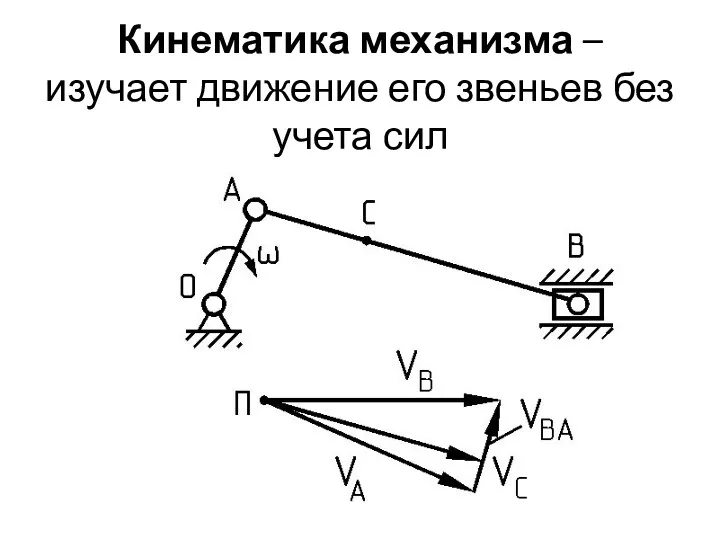
Кинематика механизма – изучает движение его звеньев без учета сил
Кинематика механизма – изучает движение его звеньев без учета сил
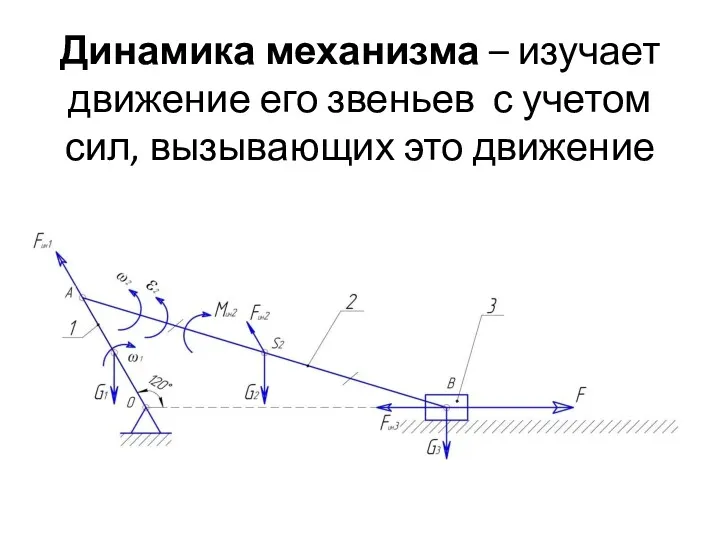
Динамика механизма – изучает движение его звеньев с учетом сил, вызывающих
Динамика механизма – изучает движение его звеньев с учетом сил, вызывающих

Анализ – определение свойств (параметров) известного механизма
Анализ – определение свойств (параметров) известного механизма

Синтез – создание нового механизма с заданными свойствами (параметрами)
Синтез – создание нового механизма с заданными свойствами (параметрами)

Машина - это устройство, которое предназначено для преобразования:
энергии, материалов, информации
Машина - это устройство, которое предназначено для преобразования:
энергии, материалов, информации
Классификация машин по функциям:
1.энергетические - ДВС, турбины,
2.технологические -
Классификация машин по функциям: 1.энергетические - ДВС, турбины, 2.технологические -

Энергетические машины
Энергетические машины

Технологические машины
Технологические машины

Транспортные машины
Транспортные машины

Кибернетические машины
Кибернетические машины
Машина состоит из механизмов
Механизм - это система тел, предназначенных для преобразования
Машина состоит из механизмов
Механизм - это система тел, предназначенных для преобразования

Механизм преобразует поступательное движение во вращательное
Механизм преобразует поступательное движение во вращательное

Механизм преобразует вращательное движение во вращательное
Механизм преобразует вращательное движение во вращательное

Механизм преобразует вращательное движение в поступательное
Механизм преобразует вращательное движение в поступательное
Механизм состоит из звеньев:
Стойка - неподвижное звено любого механизма.
Кривошип
Механизм состоит из звеньев: Стойка - неподвижное звено любого механизма. Кривошип
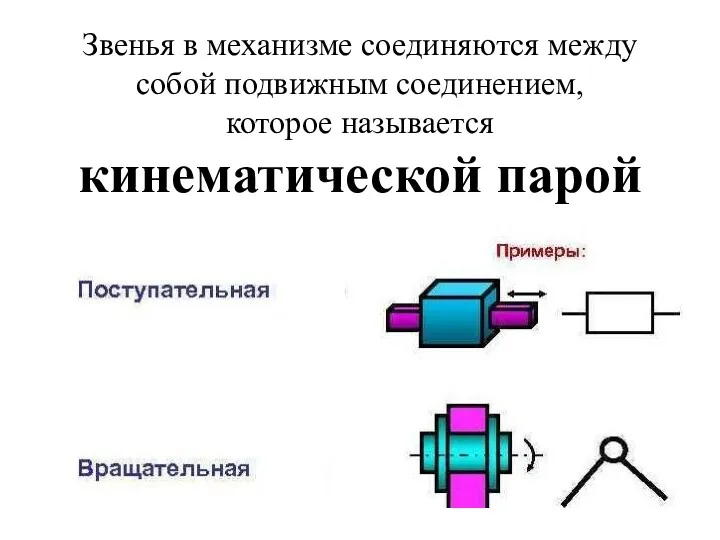
Звенья в механизме соединяются между собой подвижным соединением,
которое называется
кинематической
Звенья в механизме соединяются между собой подвижным соединением, которое называется кинематической
По характеру соприкосновения звеньев, кинематические пары бывают
высшие и низшие.
По количеству
По характеру соприкосновения звеньев, кинематические пары бывают высшие и низшие. По количеству
Кинематические цепи
Любой механизм представляет собой кинематическую цепь из звеньев, одно из
Кинематические цепи
Любой механизм представляет собой кинематическую цепь из звеньев, одно из
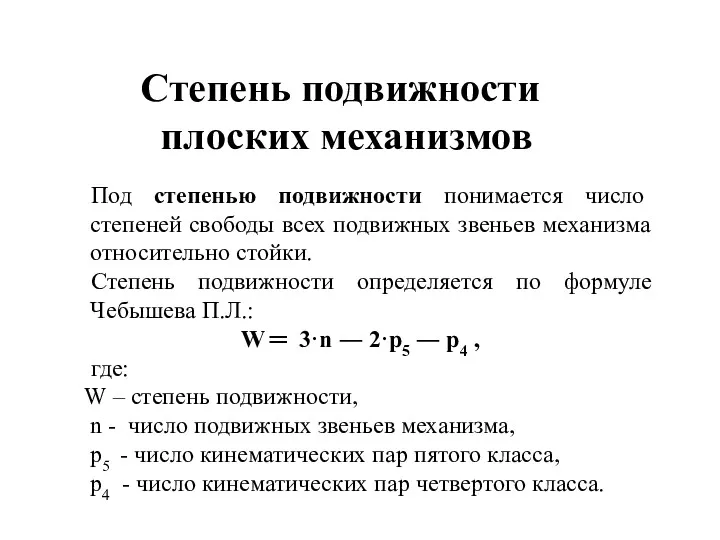
Степень подвижности
плоских механизмов
Под степенью подвижности понимается число степеней
Степень подвижности
плоских механизмов
Под степенью подвижности понимается число степеней
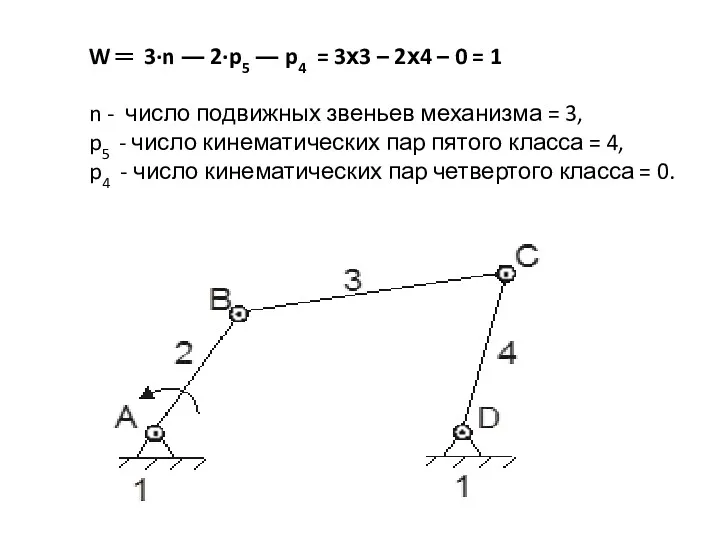
W ═ 3·n ― 2·p5 ― p4 = 3х3 – 2х4
W ═ 3·n ― 2·p5 ― p4 = 3х3 – 2х4
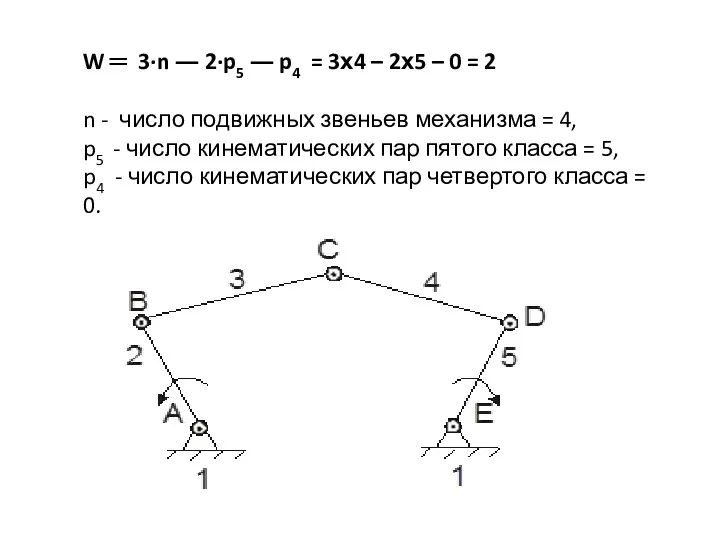
W ═ 3·n ― 2·p5 ― p4 = 3х4 – 2х5
W ═ 3·n ― 2·p5 ― p4 = 3х4 – 2х5
При проектировании механизмов для повышения жёсткости конструкции и улучшения условий передачи
При проектировании механизмов для повышения жёсткости конструкции и улучшения условий передачи
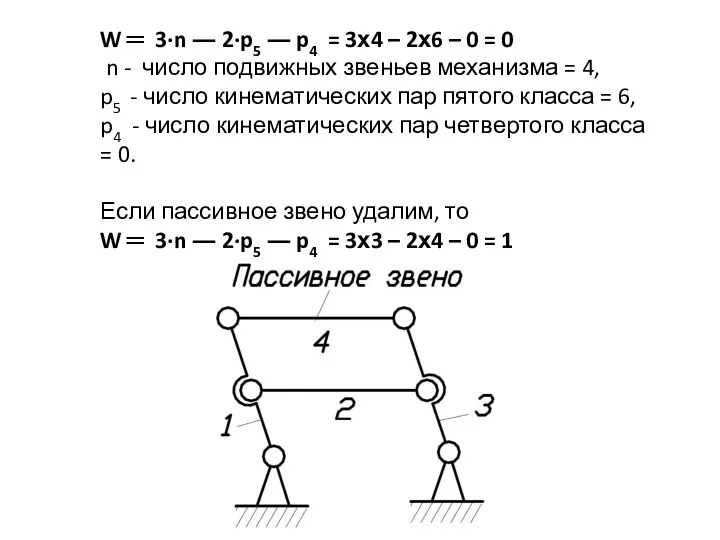
W ═ 3·n ― 2·p5 ― p4 = 3х4 – 2х6
W ═ 3·n ― 2·p5 ― p4 = 3х4 – 2х6
Лишние степени свободы
Это дополнительное движение звена, используют для сокращения
Лишние степени свободы
Это дополнительное движение звена, используют для сокращения
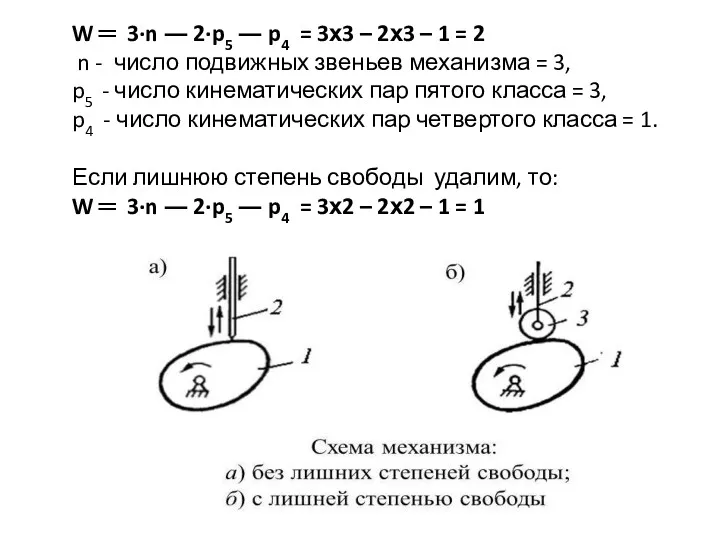
W ═ 3·n ― 2·p5 ― p4 = 3х3 – 2х3
W ═ 3·n ― 2·p5 ― p4 = 3х3 – 2х3
Замена в механизмах высших кинематических пар на низшие
Чтобы облегчить расчеты механизма,
Замена в механизмах высших кинематических пар на низшие Чтобы облегчить расчеты механизма,
2.СТРУКТУРНЫЙ АНАЛИЗ МЕХАНИЗМА
Цель: определить класс механизма
2.СТРУКТУРНЫЙ АНАЛИЗ МЕХАНИЗМА
Цель: определить класс механизма
Как образуются новые
плоские механизмы ?
На этот вопрос ответил в 1914
Как образуются новые плоские механизмы ? На этот вопрос ответил в 1914
Принцип образования
плоских механизмов, предложенный Ассуром Л.В.
К начальному механизму последовательно присоединяются
Принцип образования плоских механизмов, предложенный Ассуром Л.В. К начальному механизму последовательно присоединяются
Контрольные вопросы по темам:
«Введение» и «Структурный анализ механизма»
Контрольные вопросы по теме
Контрольные вопросы по темам: «Введение» и «Структурный анализ механизма» Контрольные вопросы по теме
Тестовое задание по теме «Структурный анализ механизма»
1. Провести структурный анализ
Тестовое задание по теме «Структурный анализ механизма» 1. Провести структурный анализ
Защита тестового задания по темам:
«Введение» и «Структурный анализ механизма»
1.
Защита тестового задания по темам: «Введение» и «Структурный анализ механизма» 1.
Благодарю за внимание!
Благодарю за внимание!
3.КИНЕМАТИЧЕСКИЙ АНАЛИЗ
МЕХАНИЗМА
Цель: изучить движение звеньев механизма без учета сил
3.КИНЕМАТИЧЕСКИЙ АНАЛИЗ
МЕХАНИЗМА
Цель: изучить движение звеньев механизма без учета сил
Задачи кинематического анализа механизма:
1. Определение перемещений.
2. Определение скоростей.
3. Определение ускорений.
Задачи кинематического анализа механизма:
1. Определение перемещений.
2. Определение скоростей.
3. Определение ускорений.
1. Определение перемещений звеньев механизма
Перемещения звеньев механизма определяют для того,
1. Определение перемещений звеньев механизма Перемещения звеньев механизма определяют для того,
Алгоритм определения перемещений звеньев механизма:
1. Проводим структурный анализ механизма, определяем его
Алгоритм определения перемещений звеньев механизма: 1. Проводим структурный анализ механизма, определяем его
2. Определение скоростей звеньев механизма
Скорости звеньев механизма определяют с целью
2. Определение скоростей звеньев механизма Скорости звеньев механизма определяют с целью
Методы определения скоростей и ускорений
На практике применяют несколько методов:
1.
Методы определения скоростей и ускорений На практике применяют несколько методов: 1.
Графоаналитический метод
называют методом планов скоростей и ускорений. Особенности этого метода: он
Графоаналитический метод называют методом планов скоростей и ускорений. Особенности этого метода: он
Алгоритм определения скоростей звеньев механизма графоаналитическим методом
1. Провести структурный анализ
Алгоритм определения скоростей звеньев механизма графоаналитическим методом 1. Провести структурный анализ
3. Определение ускорений звеньев механизма
Ускорения звеньев механизма определяют для того, чтобы
3. Определение ускорений звеньев механизма Ускорения звеньев механизма определяют для того, чтобы
Алгоритм определения ускорений звеньев механизма
1. Провести структурный анализ механизма (мы
Алгоритм определения ускорений звеньев механизма 1. Провести структурный анализ механизма (мы
Графический метод кинематического анализа механизма
Преимущество графического метода заключается в наглядности
Графический метод кинематического анализа механизма Преимущество графического метода заключается в наглядности
Алгоритм графического метода кинематического анализа кривошипно-шатунного механизма
1. Построить 8 положений
Алгоритм графического метода кинематического анализа кривошипно-шатунного механизма 1. Построить 8 положений
Контрольные вопросы по теме
«Кинематический анализ механизма»
Контрольные вопросы по теме Кинематический анализ
Контрольные вопросы по теме «Кинематический анализ механизма» Контрольные вопросы по теме Кинематический анализ
Тестовое задание по теме «Кинематический анализ механизма»
1. Построить кинематическую схему
Тестовое задание по теме «Кинематический анализ механизма» 1. Построить кинематическую схему
Защита тестового задания по теме
«Кинематический анализ механизма»
1. Оформить тестовое
Защита тестового задания по теме «Кинематический анализ механизма» 1. Оформить тестовое
Благодарю за внимание!
Благодарю за внимание!
4.ДИНАМИЧЕСКИЙ АНАЛИЗ МЕХАНИЗМА
Цель – изучить движение звеньев механизма с учетом
4.ДИНАМИЧЕСКИЙ АНАЛИЗ МЕХАНИЗМА Цель – изучить движение звеньев механизма с учетом
Задачи динамического анализа механизма:
1. Силовой анализ механизма.
2. Динамика механизма.
Задачи динамического анализа механизма:
1. Силовой анализ механизма.
2. Динамика механизма.
Силовой анализ механизма
посвящен определению реакций в кинематических парах и
Силовой анализ механизма посвящен определению реакций в кинематических парах и
Алгоритм силового анализа механизма:
1. Провести структурный анализ механизма.
2. Провести кинематический
Алгоритм силового анализа механизма: 1. Провести структурный анализ механизма. 2. Провести кинематический
2. Динамика механизма
посвящена определению истинного закона движения ведущего звена
2. Динамика механизма посвящена определению истинного закона движения ведущего звена
Контрольные вопросы по теме «Динамический анализ механизма»
Контрольные вопросы по теме Динамический
Контрольные вопросы по теме «Динамический анализ механизма» Контрольные вопросы по теме Динамический
Тестовое задание по теме «Динамический анализ механизма»
1. Показать на схеме
Тестовое задание по теме «Динамический анализ механизма» 1. Показать на схеме
Защита тестового задания по теме «Динамический анализ механизма»
1. Оформить тестовое
Защита тестового задания по теме «Динамический анализ механизма» 1. Оформить тестовое
Благодарю за внимание.
Благодарю за внимание.
5.МЕХАНИЗМЫ ПЕРЕДАЧ
1. Анализ (кинематический).
2. Синтез по кинематическим параметрам.
5.МЕХАНИЗМЫ ПЕРЕДАЧ
1. Анализ (кинематический).
2. Синтез по кинематическим параметрам.
1. Кинематический анализ механизмов передач.
Механизмы передач – это механизмы для
1. Кинематический анализ механизмов передач. Механизмы передач – это механизмы для


1.1. Зубчатые механизмы передач
1.1. Зубчатые механизмы передач

1.2. Зубчатые механизмы передач
1.2. Зубчатые механизмы передач

1.3. Зубчатые механизмы передач
1.3. Зубчатые механизмы передач
1.4. Передаточное отношение зубчатых механизмов передач
Знак передаточного отношения определяется для
1.4. Передаточное отношение зубчатых механизмов передач Знак передаточного отношения определяется для
2. Синтез механизмов передач по кинематическим параметрам.
Синтез механизмов, по сравнению
2. Синтез механизмов передач по кинематическим параметрам. Синтез механизмов, по сравнению
2.1. Задачи синтеза механизма:
1. Преобразование вращательного движения во вращательное.
2. Преобразование
2.1. Задачи синтеза механизма: 1. Преобразование вращательного движения во вращательное. 2. Преобразование

Преобразование вращательного движения во вращательное
Преобразование вращательного движения во вращательное
Преобразование вращательного движения в поступательное
Преобразование вращательного движения в поступательное

Преобразование поступательного движения в поступательное
Преобразование поступательного движения в поступательное

Воспроизведение требуемой траектории движения звена
Воспроизведение требуемой траектории движения звена
2.2. Синтез трехзвенных зубчатых механизмов .
1. В качестве примера, рассмотрим
2.2. Синтез трехзвенных зубчатых механизмов . 1. В качестве примера, рассмотрим
Контрольные вопросы по теме
«Механизмы передач»
Контрольные вопросы по теме Механизмы передач.docx
Контрольные вопросы по теме
«Механизмы передач»
Контрольные вопросы по теме Механизмы передач.docx
Тестовое задание по теме
«Механизмы передач»
1. Определить передаточное отношение многоступенчатого
Тестовое задание по теме «Механизмы передач» 1. Определить передаточное отношение многоступенчатого
Защита тестового задания по теме «Механические передачи»
1. Оформить тестовое задание
Защита тестового задания по теме «Механические передачи» 1. Оформить тестовое задание
6.КУЛАЧКОВЫЕ МЕХАНИЗМЫ
1. Анализ (кинематический).
2. Синтез по кинематическим параметрам.
6.КУЛАЧКОВЫЕ МЕХАНИЗМЫ
1. Анализ (кинематический).
2. Синтез по кинематическим параметрам.
1. Кинематический анализ кулачковых механизмов.
Кинематический анализ кулачковых механизмов.docx
1. Кинематический анализ кулачковых механизмов.
Кинематический анализ кулачковых механизмов.docx
2. Синтез кулачковых механизмов по кинематическим параметрам.
Дополнительные материалы\Синтез кулачковых механизмов по
2. Синтез кулачковых механизмов по кинематическим параметрам. Дополнительные материалы\Синтез кулачковых механизмов по
Контрольные вопросы по теме
«Кулачковые механизмы»
Контрольные вопросы по теме Кулачковые механизы.docx
Контрольные вопросы по теме
«Кулачковые механизмы»
Контрольные вопросы по теме Кулачковые механизы.docx
Защита тестового задания по теме «Кулачковые механизмы»
1. Устно ответить на
Защита тестового задания по теме «Кулачковые механизмы» 1. Устно ответить на
Уважаемые коллеги!
Если Вы успешно защитили тестовые задания по всем темам, поздравляю
Уважаемые коллеги! Если Вы успешно защитили тестовые задания по всем темам, поздравляю
 Гидравлика. Закон Паскаля
Гидравлика. Закон Паскаля Изотопы. Радиоактивные превращения атомных ядер
Изотопы. Радиоактивные превращения атомных ядер Обобщающий урок по теме Давление, физика, 7 класс
Обобщающий урок по теме Давление, физика, 7 класс Квантование сигналов по уровню
Квантование сигналов по уровню Внутрицентровое поглощение света на примесных уровнях в ИК-диапазоне
Внутрицентровое поглощение света на примесных уровнях в ИК-диапазоне Принципы радиосвязи и телевидения
Принципы радиосвязи и телевидения Электрический ток в жидкостях
Электрический ток в жидкостях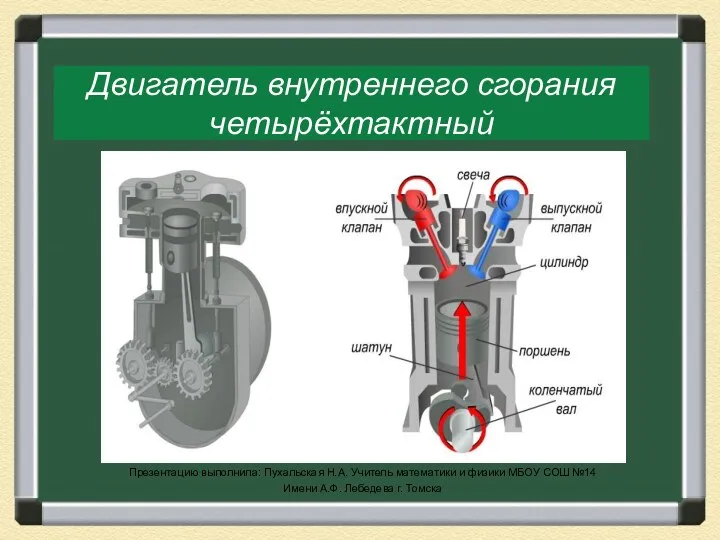 Двигатель внутреннего сгорания.
Двигатель внутреннего сгорания. Презентация к уроку по физике по теме Давление в твердых телах, жидкостях и газах
Презентация к уроку по физике по теме Давление в твердых телах, жидкостях и газах Презентация Основные положения МКТ
Презентация Основные положения МКТ Электрическое напряжение. Единицы напряжения. Вольтметр
Электрическое напряжение. Единицы напряжения. Вольтметр Статистическое описание системы частиц
Статистическое описание системы частиц Кристаллы, их структура, виды связей. Дефекты. Деформации твердого тела
Кристаллы, их структура, виды связей. Дефекты. Деформации твердого тела Дифракция света
Дифракция света Полупроводники. Собственная проводимость полупроводников. Полупроводниковые приборы
Полупроводники. Собственная проводимость полупроводников. Полупроводниковые приборы Исследование термодинамических процессов водяного пара. Смеси идеальных газов. Влажный воздух. (Занятие 5)
Исследование термодинамических процессов водяного пара. Смеси идеальных газов. Влажный воздух. (Занятие 5)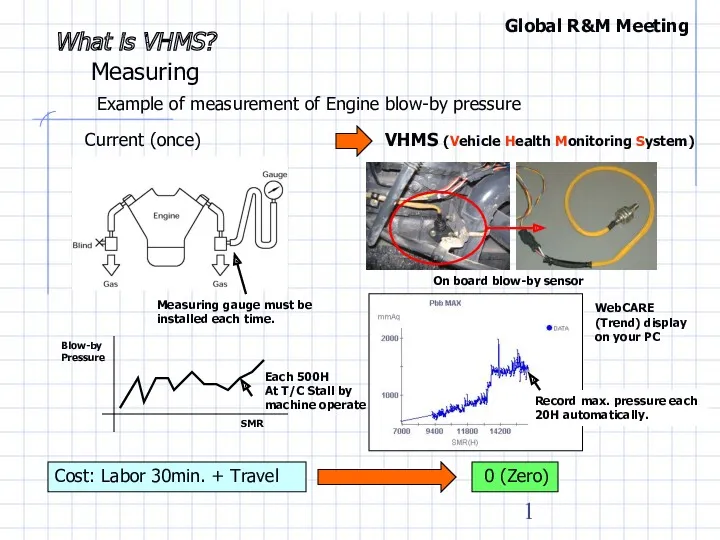 Summary of effective use 6
Summary of effective use 6 Плотность вещества, плотность сплавов, нахождение объёма полости
Плотность вещества, плотность сплавов, нахождение объёма полости Субмикронная литография
Субмикронная литография Кинематика твердого тела введение
Кинематика твердого тела введение Подшипники скольжения и качения
Подшипники скольжения и качения Переработка и захоронение токсичных радиоактивных отходов
Переработка и захоронение токсичных радиоактивных отходов Эксплуатация и техническое обслуживание двигателя 8ЧСПН18/22
Эксплуатация и техническое обслуживание двигателя 8ЧСПН18/22 Судовые устройства. Классификация
Судовые устройства. Классификация Организация работ по монтажу, ремонту и наладке систем автоматизации, средств измерений и мехатронных систем
Организация работ по монтажу, ремонту и наладке систем автоматизации, средств измерений и мехатронных систем Последовательное соединение проводников
Последовательное соединение проводников Изобретение радио А.С. Поповым
Изобретение радио А.С. Поповым Аналогии физических свойств сегнетоэлектрических и ферромагнитных кристаллов
Аналогии физических свойств сегнетоэлектрических и ферромагнитных кристаллов