- Bounding volume hierarchies and spatial partitioning

Содержание
- 2. Introduction Bounding Volume Hierarchies vs. Spatial Partitioning What are they and how do they compare? Motivation:
- 3. What are they? How do they Compare? Bounding Volume Hierarchies Hierarchical object representation Object subdivision Hierarchical
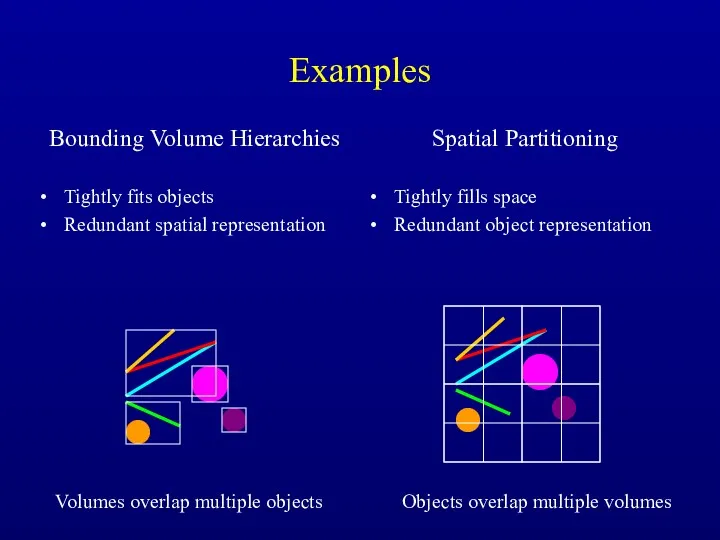
- 4. Examples Bounding Volume Hierarchies Tightly fits objects Redundant spatial representation Spatial Partitioning Tightly fills space Redundant
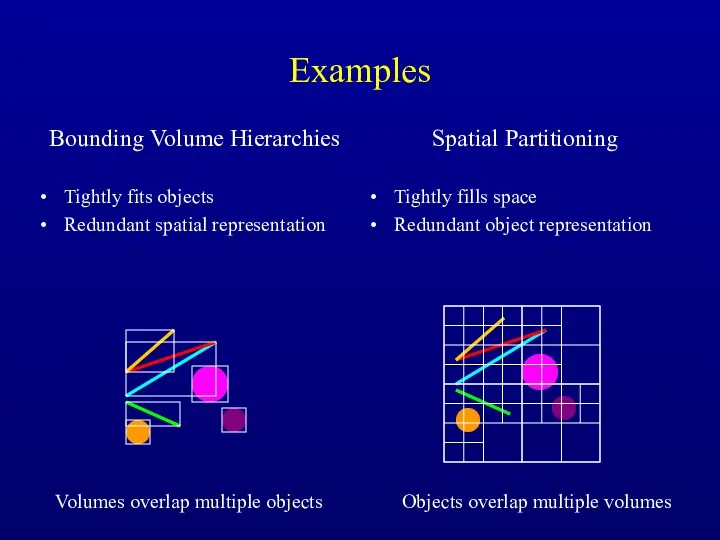
- 5. Examples Bounding Volume Hierarchies Tightly fits objects Redundant spatial representation Spatial Partitioning Tightly fills space Redundant
- 6. Examples Bounding Volume Hierarchies Tightly fits objects Redundant spatial representation Spatial Partitioning Tightly fills space Redundant
- 7. Examples Bounding Volume Hierarchies Tightly fits objects Redundant spatial representation Spatial Partitioning Tightly fills space Redundant
- 8. Motivation: Example Applications View-frustum culling O(n) Ray-tracing O(n) per ray Collision detection O(n2)
- 9. How do we speed it up? More efficient intersection calculations Avoid intersection calculations Make a single
- 10. How can bounding volume hierarchies help? View-frustum culling Ray-tracing Collision detection
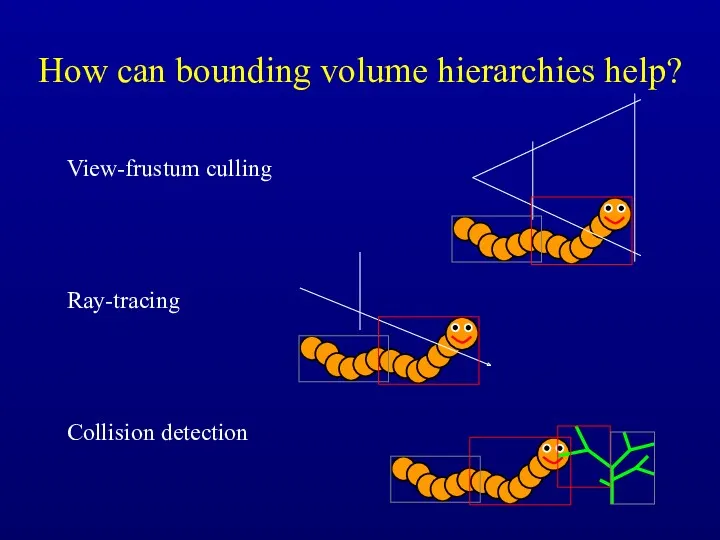
- 11. How can bounding volume hierarchies help? View-frustum culling Ray-tracing Collision detection
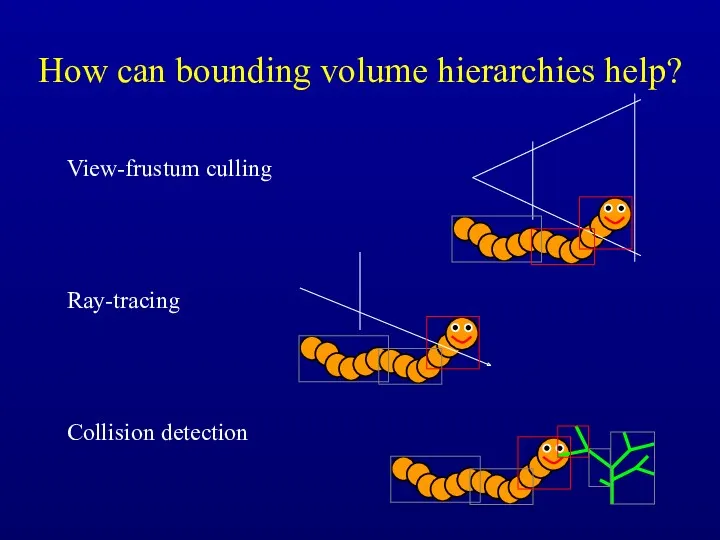
- 12. How can bounding volume hierarchies help? View-frustum culling Ray-tracing Collision detection
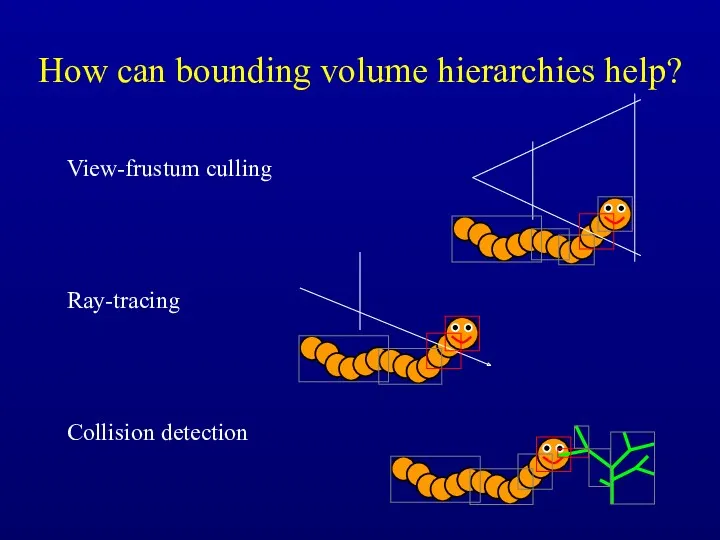
- 13. How can bounding volume hierarchies help? View-frustum culling Ray-tracing Collision detection
- 14. How can bounding volume hierarchies help? Logarithmic search for intersecting primitives!
- 15. How can spatial partitioning help? View-frustum culling Ray-tracing Collision detection Uniform spatial partitioning
- 16. How can spatial partitioning help? Performance varies for uniform partitioning, but hierarchical approaches also give logarithmic
- 17. What are the potential problems? What are the hidden costs? When nothing intersects? When nearly everything
- 18. Building Bounding Volume Hierarchies Choose a bounding volume type Axis-aligned bounding box (AABB) Oriented bounding box
- 19. Bounding Volume Type Intersection cost vs. tightness of fit vs. storage overhead vs. implementation complexity How
- 20. Hierarchical Clustering Strategy Top-down: how do we partition objects among children? Choosing splitting axis longest dimension,
- 21. Building Spatial Partitionings Decide how to recursively subdivide space (top-down) Decide how to classify objects into
- 22. What’s the best choice? Depends on the application trial and error? “Gut” feeling? Careful analysis based
- 23. Can we do better? Combining bounding volume hierarchies and spatial partitioning Examples: Occlusion culling: octrees of
- 24. Conclusion These hierarchical data structures are fundamental in a wide variety of graphics problems most common
- 26. Скачать презентацию
Introduction
Bounding Volume Hierarchies vs. Spatial Partitioning
What are they and how do
Introduction
Bounding Volume Hierarchies vs. Spatial Partitioning
What are they and how do
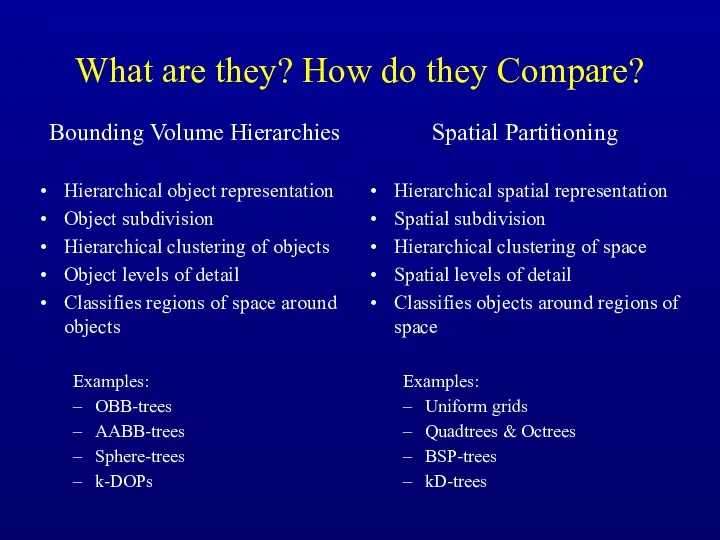
What are they? How do they Compare?
Bounding Volume Hierarchies
Hierarchical object representation
Object
What are they? How do they Compare?
Bounding Volume Hierarchies
Hierarchical object representation
Object
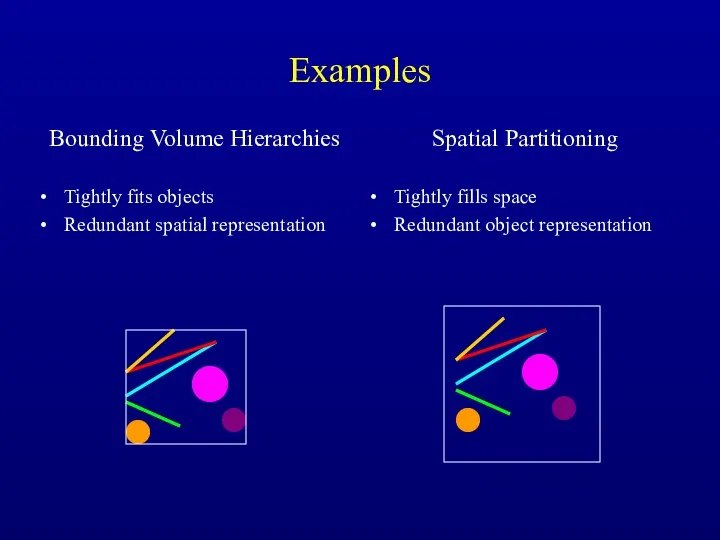
Examples
Bounding Volume Hierarchies
Tightly fits objects
Redundant spatial representation
Spatial Partitioning
Tightly fills space
Redundant object
Examples
Bounding Volume Hierarchies
Tightly fits objects
Redundant spatial representation
Spatial Partitioning
Tightly fills space
Redundant object
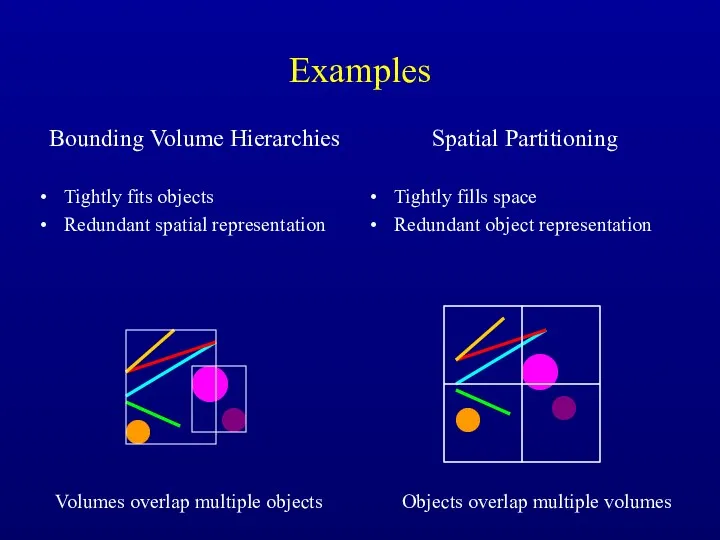
Examples
Bounding Volume Hierarchies
Tightly fits objects
Redundant spatial representation
Spatial Partitioning
Tightly fills space
Redundant object
Examples
Bounding Volume Hierarchies
Tightly fits objects
Redundant spatial representation
Spatial Partitioning
Tightly fills space
Redundant object
Examples
Bounding Volume Hierarchies
Tightly fits objects
Redundant spatial representation
Spatial Partitioning
Tightly fills space
Redundant object
Examples
Bounding Volume Hierarchies
Tightly fits objects
Redundant spatial representation
Spatial Partitioning
Tightly fills space
Redundant object
Examples
Bounding Volume Hierarchies
Tightly fits objects
Redundant spatial representation
Spatial Partitioning
Tightly fills space
Redundant object
Examples
Bounding Volume Hierarchies
Tightly fits objects
Redundant spatial representation
Spatial Partitioning
Tightly fills space
Redundant object
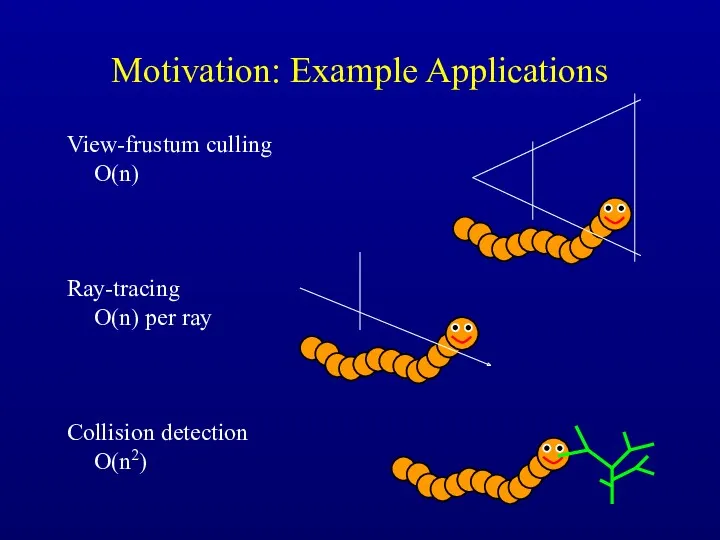
Motivation: Example Applications
View-frustum culling O(n)
Ray-tracing
O(n) per ray
Collision detection
O(n2)
Motivation: Example Applications
View-frustum culling O(n)
Ray-tracing
O(n) per ray
Collision detection
O(n2)
How do we speed it up?
More efficient intersection calculations
Avoid intersection calculations
Make
How do we speed it up?
More efficient intersection calculations
Avoid intersection calculations
Make
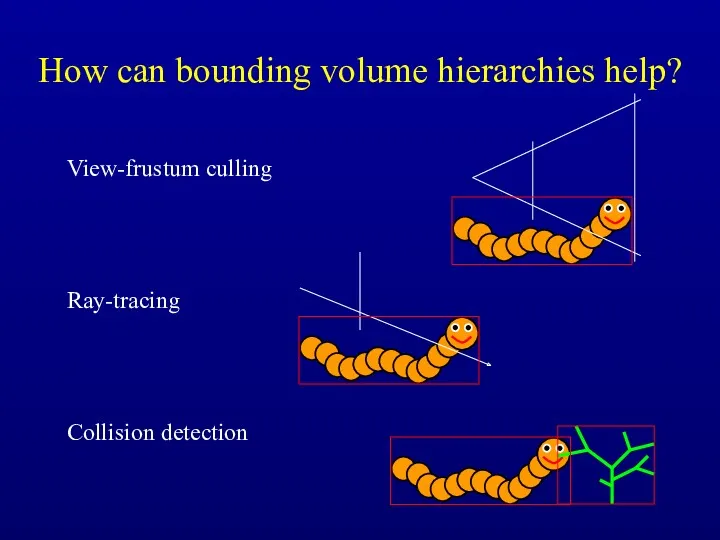
How can bounding volume hierarchies help?
View-frustum culling
Ray-tracing
Collision detection
How can bounding volume hierarchies help?
View-frustum culling
Ray-tracing
Collision detection
How can bounding volume hierarchies help?
View-frustum culling
Ray-tracing
Collision detection
How can bounding volume hierarchies help?
View-frustum culling
Ray-tracing
Collision detection
How can bounding volume hierarchies help?
View-frustum culling
Ray-tracing
Collision detection
How can bounding volume hierarchies help?
View-frustum culling
Ray-tracing
Collision detection
How can bounding volume hierarchies help?
View-frustum culling
Ray-tracing
Collision detection
How can bounding volume hierarchies help?
View-frustum culling
Ray-tracing
Collision detection
How can bounding volume hierarchies help?
Logarithmic search for intersecting primitives!
How can bounding volume hierarchies help?
Logarithmic search for intersecting primitives!
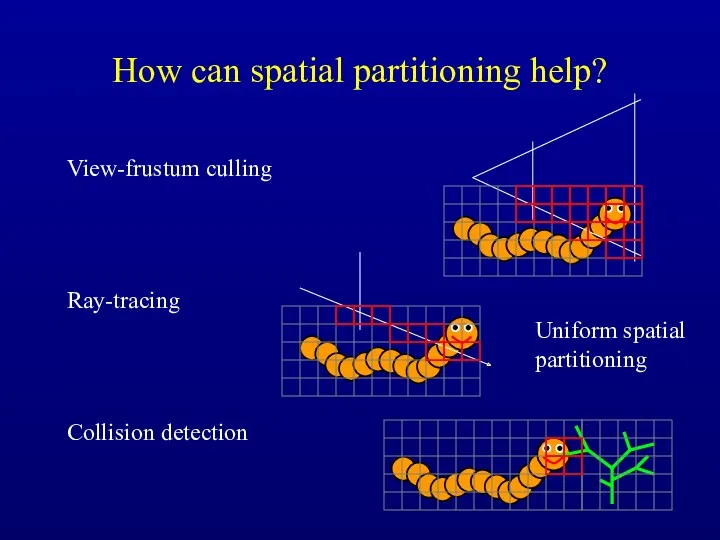
How can spatial partitioning help?
View-frustum culling
Ray-tracing
Collision detection
Uniform spatial partitioning
How can spatial partitioning help?
View-frustum culling
Ray-tracing
Collision detection
Uniform spatial partitioning
How can spatial partitioning help?
Performance varies for uniform partitioning, but hierarchical
How can spatial partitioning help?
Performance varies for uniform partitioning, but hierarchical
What are the potential problems?
What are the hidden costs?
When nothing intersects?
When
What are the potential problems?
What are the hidden costs?
When nothing intersects?
When
Building Bounding Volume Hierarchies
Choose a bounding volume type
Axis-aligned bounding box (AABB)
Oriented
Building Bounding Volume Hierarchies
Choose a bounding volume type
Axis-aligned bounding box (AABB)
Oriented
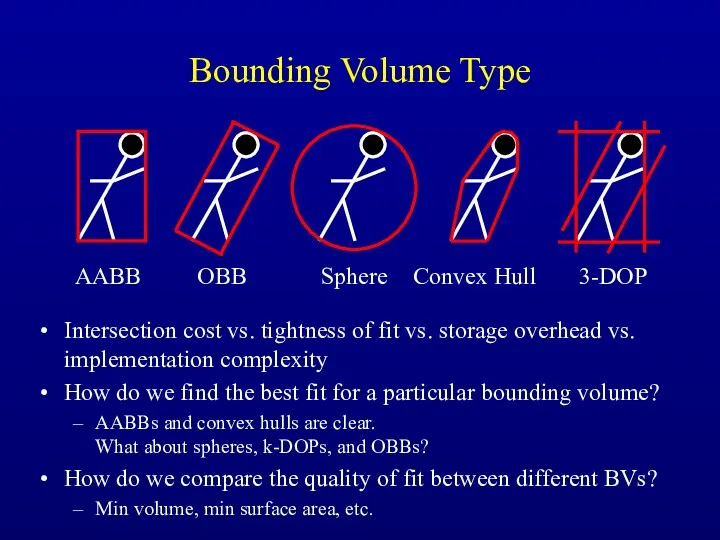
Bounding Volume Type
Intersection cost vs. tightness of fit vs. storage overhead
Bounding Volume Type
Intersection cost vs. tightness of fit vs. storage overhead
Hierarchical Clustering Strategy
Top-down: how do we partition objects among children?
Choosing splitting
Hierarchical Clustering Strategy
Top-down: how do we partition objects among children?
Choosing splitting
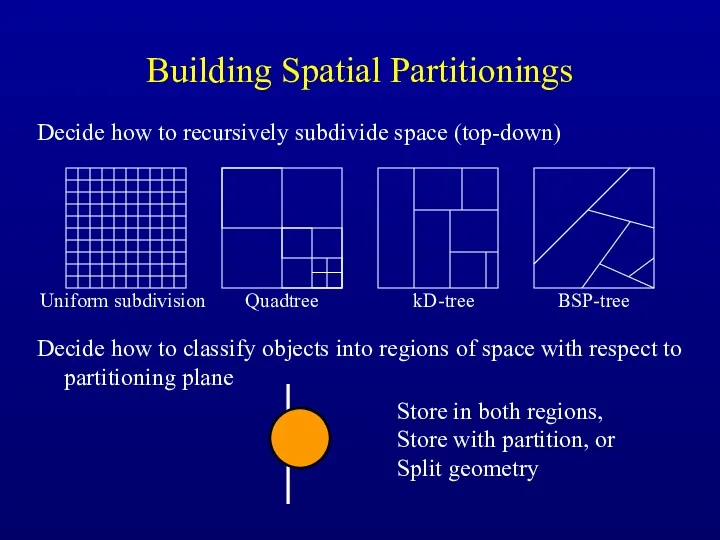
Building Spatial Partitionings
Decide how to recursively subdivide space (top-down)
Decide how to
Building Spatial Partitionings
Decide how to recursively subdivide space (top-down)
Decide how to
What’s the best choice?
Depends on the application
trial and error?
“Gut” feeling?
Careful analysis
What’s the best choice?
Depends on the application
trial and error?
“Gut” feeling?
Careful analysis
Can we do better?
Combining bounding volume hierarchies and spatial partitioning
Examples:
Occlusion culling:
Can we do better?
Combining bounding volume hierarchies and spatial partitioning
Examples:
Occlusion culling:
Conclusion
These hierarchical data structures are fundamental in a wide variety of
Conclusion
These hierarchical data structures are fundamental in a wide variety of
 ФАЙЛОВАЯ СИСТЕМА – хаос или порядок?
ФАЙЛОВАЯ СИСТЕМА – хаос или порядок? Электронная почта. История создания
Электронная почта. История создания Word 2007: спецкурс
Word 2007: спецкурс Дискретный анализ. Лекция 1
Дискретный анализ. Лекция 1 Компьютер и здоровье
Компьютер и здоровье Web - cайт: создание гиперссылки, списков, таблиц, изображений
Web - cайт: создание гиперссылки, списков, таблиц, изображений ФГИС ЕГРН. ПКУРП
ФГИС ЕГРН. ПКУРП Анимированный кроссворд
Анимированный кроссворд Система сбора и анализа сведений о преподавателях
Система сбора и анализа сведений о преподавателях Объект и его имя
Объект и его имя Компьютерлік модельдеу түсінігі
Компьютерлік модельдеу түсінігі Безопасность общения в социальных сетях
Безопасность общения в социальных сетях Система учета ремонтных событий – инструкция по работе с программой GSIS
Система учета ремонтных событий – инструкция по работе с программой GSIS Отчет по технической службе B2C, подключение
Отчет по технической службе B2C, подключение Автоматизированные информационные системы
Автоматизированные информационные системы Элементы алгебры логики. Упрощение логических выражений
Элементы алгебры логики. Упрощение логических выражений Общие сведения о языке программирования Паскаль. Начала программирования. (9 класс)
Общие сведения о языке программирования Паскаль. Начала программирования. (9 класс) Mobile Growth Powered by AI Technology
Mobile Growth Powered by AI Technology Какими я вижу компьютеры будущего
Какими я вижу компьютеры будущего Функциональное программирование
Функциональное программирование Инструкция по запуску дистанционных курсов
Инструкция по запуску дистанционных курсов Технологии разработки интернет-систем
Технологии разработки интернет-систем Технологии компьютерной анимации
Технологии компьютерной анимации Криптография с открытым ключом. Лекция 5
Криптография с открытым ключом. Лекция 5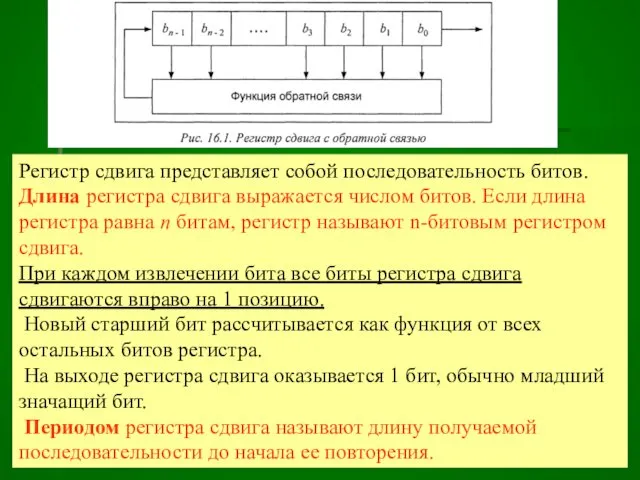 Регистр сдвига
Регистр сдвига Текстовый редактор. Правила набора текста. Информатика. 5 класс
Текстовый редактор. Правила набора текста. Информатика. 5 класс Математические модели потоков телефонных вызовов
Математические модели потоков телефонных вызовов Как устроена компьютерная сеть
Как устроена компьютерная сеть