- Новые возможности в человекомашинном интерфейсе. (Лекция 1)

Содержание
- 2. Содержание лекции Введение История развития человеко-компьютерного взаимодействия Что такое естественно-интуитивное взаимодействие Техническое обеспечение Сравнение современных камер
- 3. Введение (1) Электронно-вычислительные машины заняли место рядом с человеком с середины XX века, и со временем
- 4. Введение (2) Разработчики стремились сделать взаимодействие с вычислительными устройствами как можно более естественным для человека. Однако
- 5. История развития человеко-компьютерного взаимодействия (1) Середина XX века - первые электронно-вычислительные машины были ориентированы на выполнение
- 6. ENIAC (Electronic Numerical Integrator And Calculator) проект 1943-46 гг. под руководством Дж. Моучли и Дж. Эккера
- 7. Из истории развития ЭВМ
- 8. Устройство чтения перфолент ЭВМ Mark I (From Harvard University Cruft Photo Laboratory) Из истории развития ЭВМ
- 9. Из истории развития ЭВМ
- 10. История развития человеко-компьютерного взаимодействия (2) 1960 год - Дж.К.Р. Ликлайдер (J.R.Licklider) выдвинул идею «симбиоза человека и
- 11. История развития человеко-компьютерного взаимодействия (3)
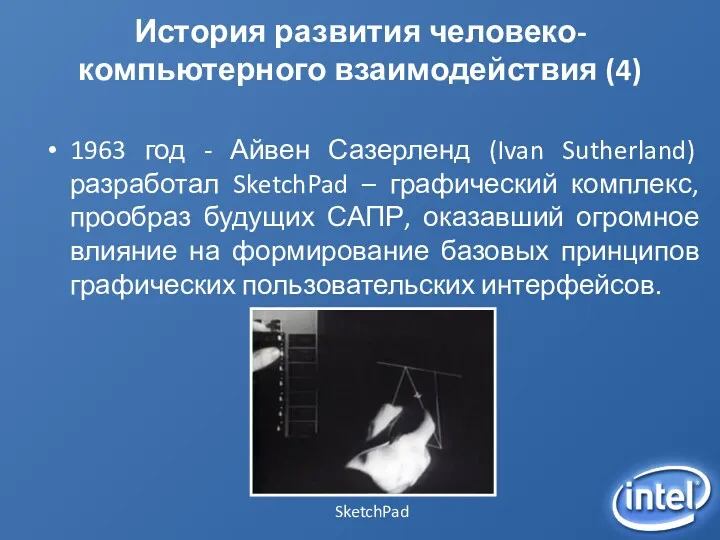
- 12. История развития человеко-компьютерного взаимодействия (4) 1963 год - Айвен Сазерленд (Ivan Sutherland) разработал SketchPad – графический
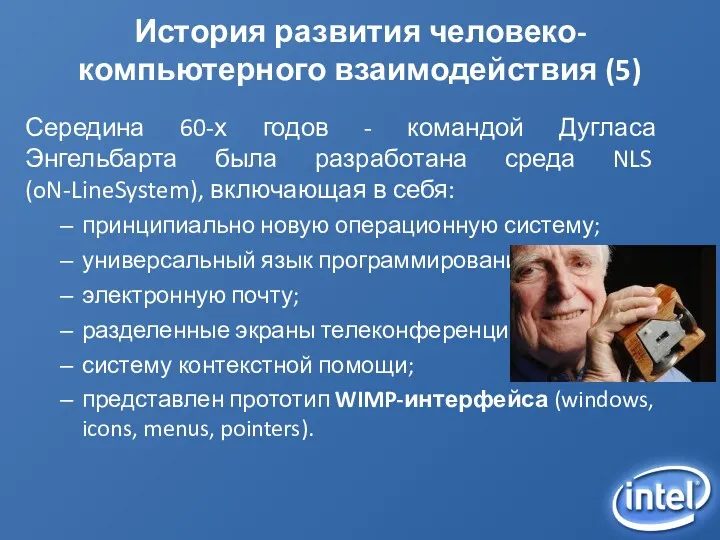
- 13. История развития человеко-компьютерного взаимодействия (5) Середина 60-х годов - командой Дугласа Энгельбарта была разработана среда NLS
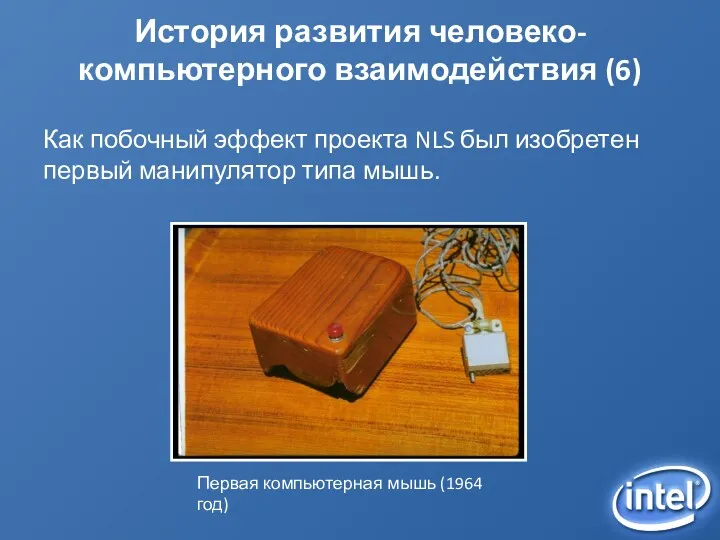
- 14. История развития человеко-компьютерного взаимодействия (6) Как побочный эффект проекта NLS был изобретен первый манипулятор типа мышь.
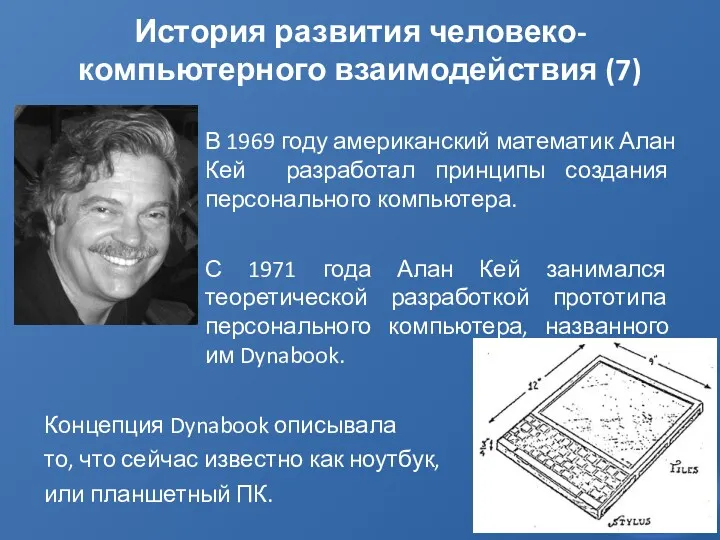
- 15. История развития человеко-компьютерного взаимодействия (7) В 1969 году американский математик Алан Кей разработал принципы создания персонального
- 16. История развития человеко-компьютерного взаимодействия (8) Несмотря на то, что графический интерфейс был описан еще в начале
- 17. Человеко-компьютерное взаимодействие Человеко-компьютерное взаимодействие (HCI, Human-Computer Interaction) – это дисциплина, имеющая дело с проектированием, оцениванием и
- 18. Эволюция устройств ввода/вывода
- 19. Естественно-интуитивное взаимодействие Естественно-интуитивное взаимодействие - это эволюция в области взаимодействии с компьютером через естественные для человека
- 20. Техническое обеспечение (1) Многие важные инженерные задачи должны быть решены с помощью: - интеграции новых усовершенствованных
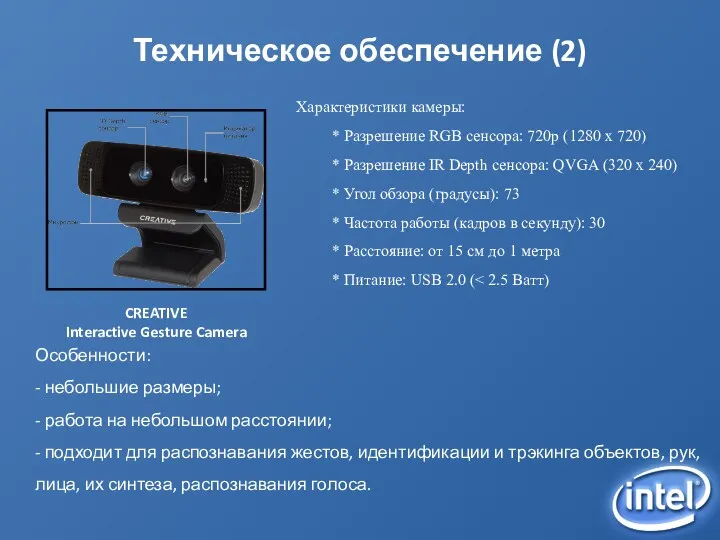
- 21. Техническое обеспечение (2) CREATIVE Interactive Gesture Camera Характеристики камеры: * Разрешение RGB сенсора: 720p (1280 x
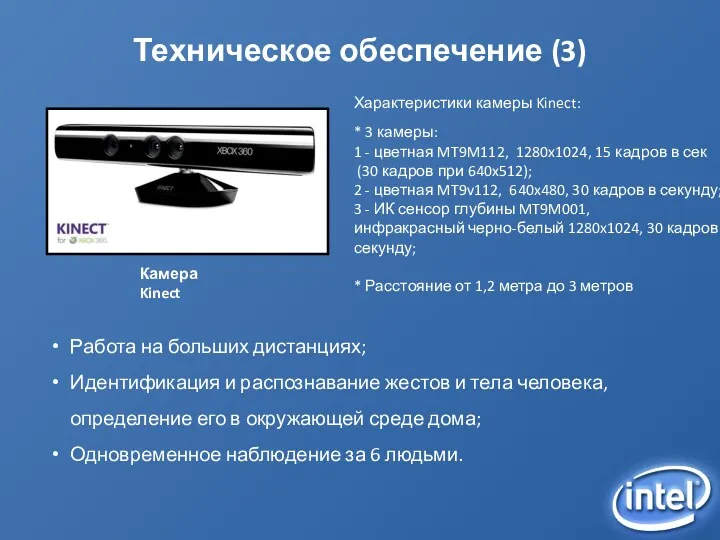
- 22. Техническое обеспечение (3) Камера Kinect Работа на больших дистанциях; Идентификация и распознавание жестов и тела человека,
- 23. Техническое обеспечение (4)
- 24. Техническое обеспечение (5)
- 25. Техническое обеспечение (6)
- 26. Средства программной разработки Intel Perceptual Computing SDK (http://www.intel.com/software/perceptual/) OpenCV (http://opencv.org/) CCV (http://libccv.org/) PCL (http://www.pointclouds.org/)
- 27. Intel Perceptual Computing SDK SDK предназначен для того, чтобы снизить стоимость разработки программных продуктов, в которых
- 28. Особенности SDK Приложения могут получить доступ к функциональности SDK напрямую за счет стандартизации интерфейсов модулей ввода/вывода
- 29. Модули обработки Intel Perceptual Computing SDK Модуль распознавания жестов; Модуль распознавания лиц; Модуль голосового управления; Модуль
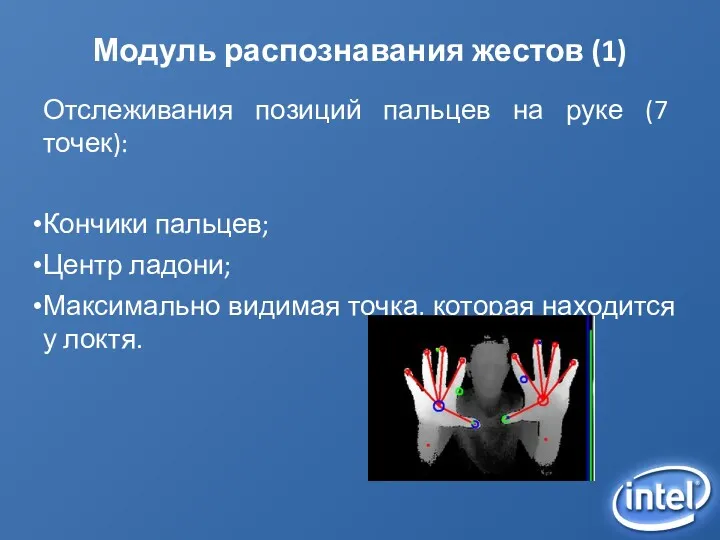
- 30. Модуль распознавания жестов (1) Отслеживания позиций пальцев на руке (7 точек): Кончики пальцев; Центр ладони; Максимально
- 31. Модуль распознавания жестов (2) Распознавание стандартных жестов: Большой палец вверх; Большой палец вниз; Символ V (победа).
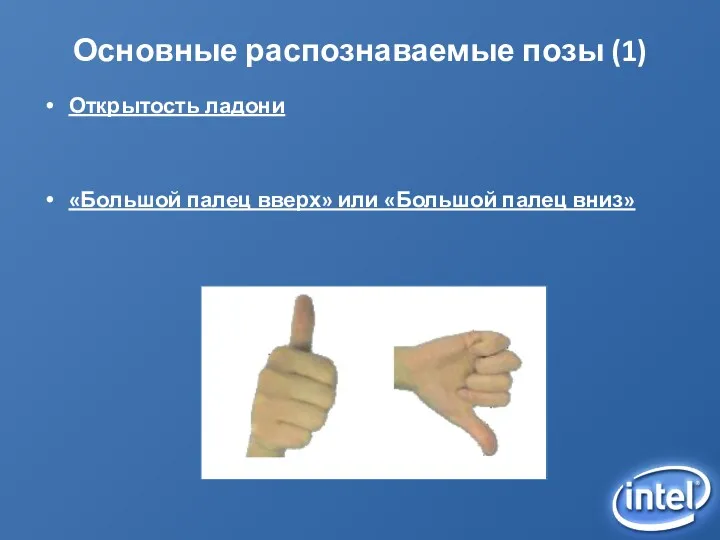
- 32. Основные распознаваемые позы (1) Открытость ладони «Большой палец вверх» или «Большой палец вниз»
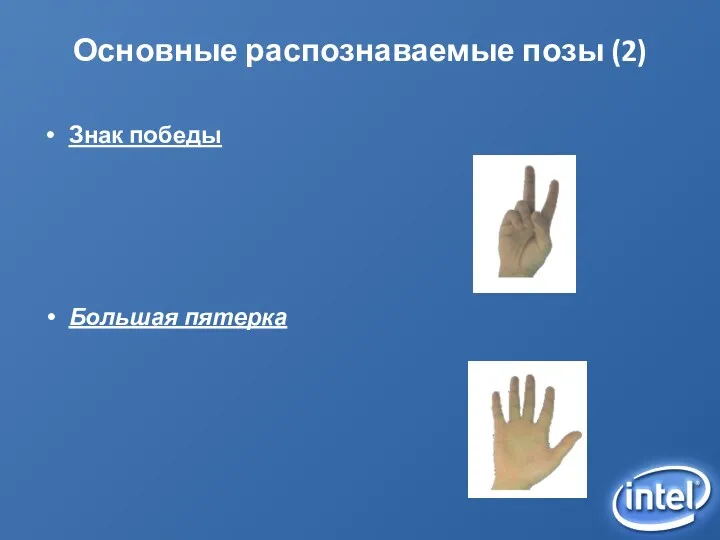
- 33. Основные распознаваемые позы (2) Знак победы Большая пятерка
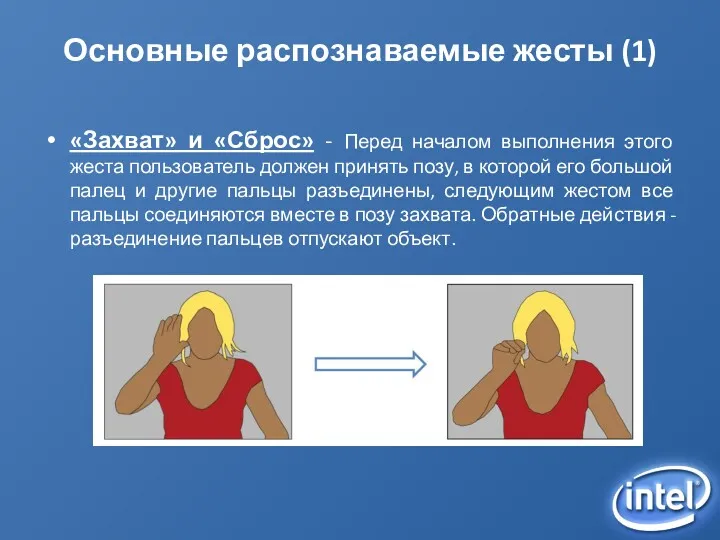
- 34. Основные распознаваемые жесты (1) «Захват» и «Сброс» - Перед началом выполнения этого жеста пользователь должен принять
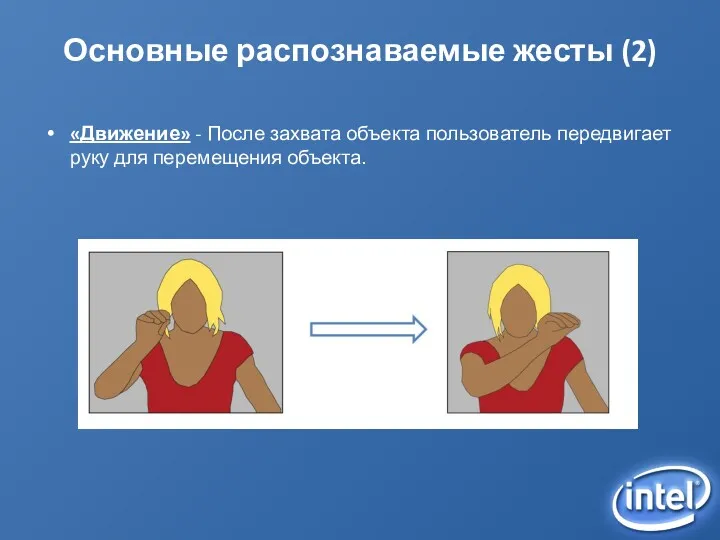
- 35. Основные распознаваемые жесты (2) «Движение» - После захвата объекта пользователь передвигает руку для перемещения объекта.
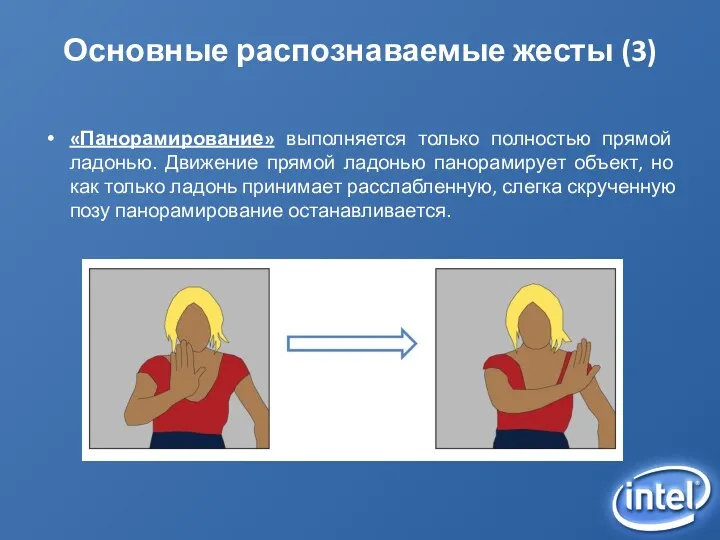
- 36. Основные распознаваемые жесты (3) «Панорамирование» выполняется только полностью прямой ладонью. Движение прямой ладонью панорамирует объект, но
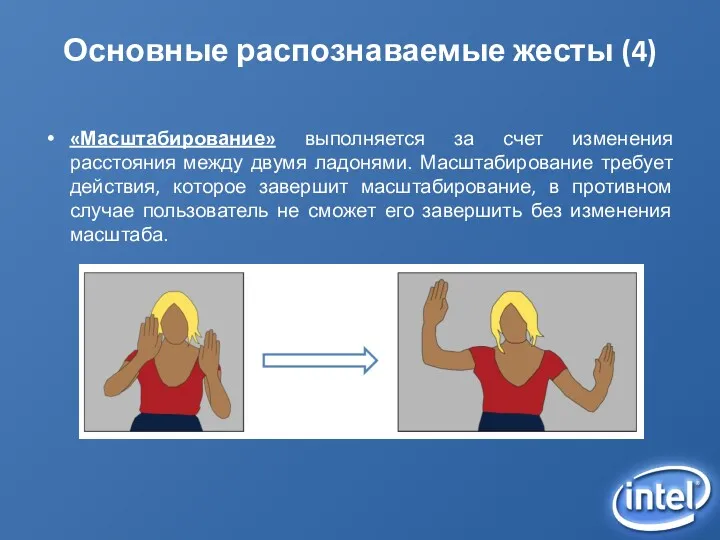
- 37. Основные распознаваемые жесты (4) «Масштабирование» выполняется за счет изменения расстояния между двумя ладонями. Масштабирование требует действия,
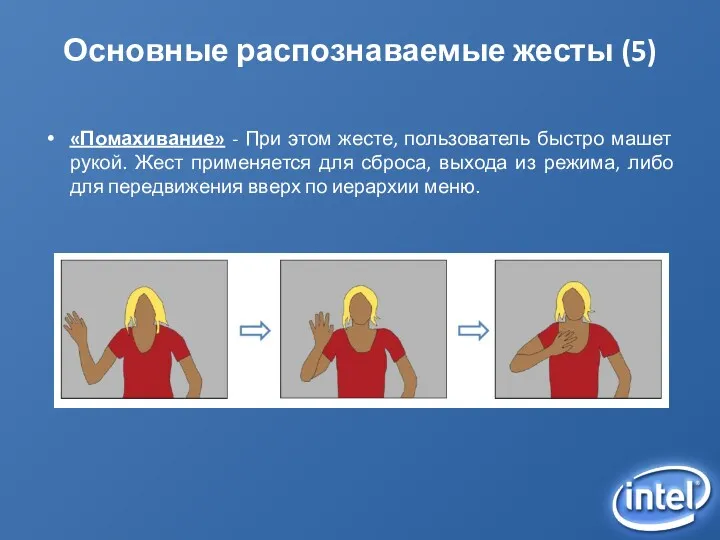
- 38. Основные распознаваемые жесты (5) «Помахивание» - При этом жесте, пользователь быстро машет рукой. Жест применяется для
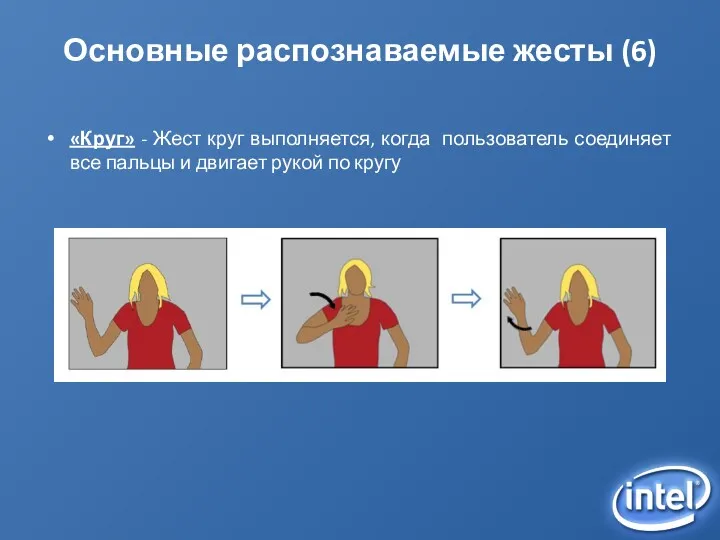
- 39. Основные распознаваемые жесты (6) «Круг» - Жест круг выполняется, когда пользователь соединяет все пальцы и двигает
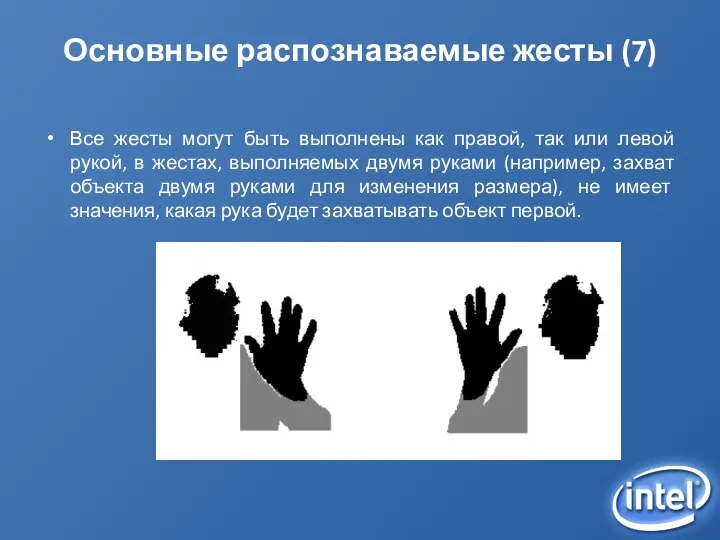
- 40. Основные распознаваемые жесты (7) Все жесты могут быть выполнены как правой, так или левой рукой, в
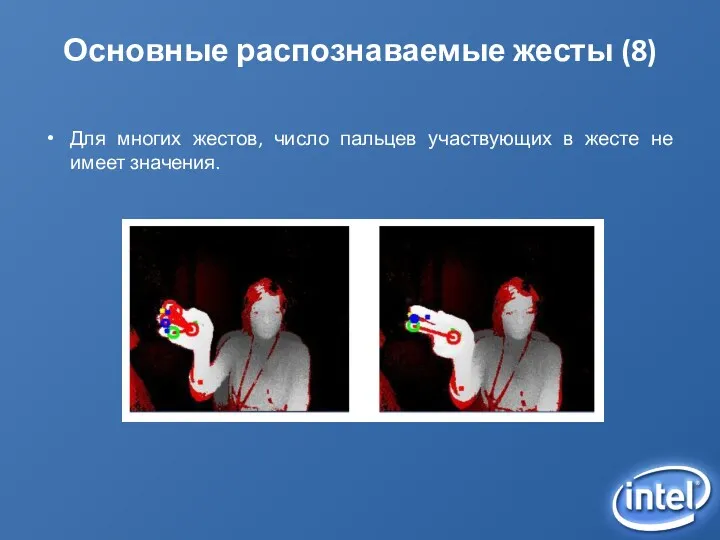
- 41. Основные распознаваемые жесты (8) Для многих жестов, число пальцев участвующих в жесте не имеет значения.
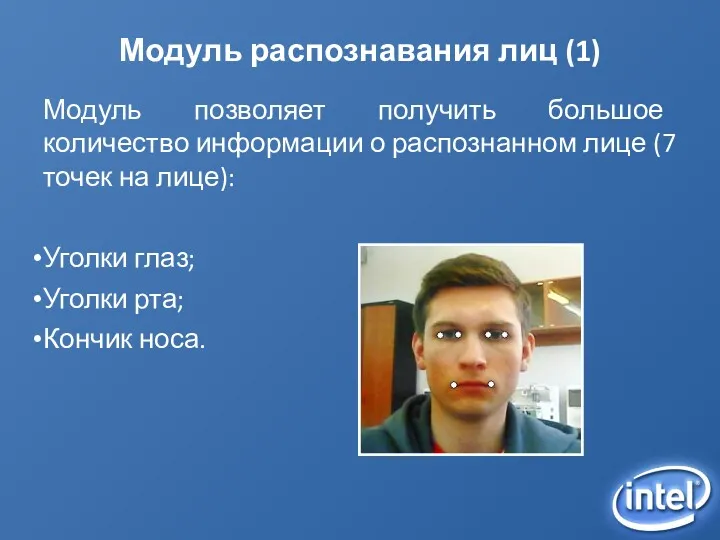
- 42. Модуль распознавания лиц (1) Модуль позволяет получить большое количество информации о распознанном лице (7 точек на
- 43. Модуль распознавания лиц (2) Обнаружение лица Распознавание лица
- 44. Модуль распознавания лиц (3) Модуль позволяет получить некоторую аналитическую информацию о распознанном лице: Возрастная группа лица
- 45. Модуль голосового управления Модуль предлагает следующую функциональность: Реализация голосовых меню; Надиктовывание; Синтез речи. На текущий момент
- 46. Модуль отслеживания двумерных и трехмерных объектов (1) Функционал данного модуля позволяет отслеживать плоские двумерные объекты. Достаточно
- 47. Интеграция с игровыми движками SDK реализует несколько уровней интерфейсов, которые позволяют сразу же использовать игровые движки.
- 48. Области применения и примеры приложений (1) Использование функций естественно-интуитивного взаимодействия в видео играх: взаимодействие игрока с
- 49. Области применения и примеры приложений (2) - Распознавание пальцев на руках; - Моделирование системы захвата какого-либо
- 50. Области применения и примеры приложений (3) Распознавание движения рук или жестов может быть интерпретировано компьютером и
- 51. Области применения и примеры приложений (4) Функции распознавания лица и контрольных точек на лице позволят определить,
- 52. Области применения и примеры приложений (5) Простая идентификация личности (фейс-логин). Комбинация параметров лица, голоса и жестов
- 53. Области применения и примеры приложений (6) Сегментация, основанная на глубине изображения, позволит разделить передний и задний
- 54. Области применения и примеры приложений (7) Распознавание трехмерных объектов реального мира и комбинирование их с интерактивным
- 55. Выводы (1) Реализация функций естественно-интуитивного взаимодействия в интерактивных приложениях позволит: Отражать реальность, а не создавать копию
- 56. Выводы (2) Новый подход к управлению в играх; Идентификация личности в системах безопасности; Сегментация объектов переднего
- 57. Выводы (3) С развитием технологий обработки речи, изображений и видео, взаимодействие человека с компьютером выходит на
- 59. Скачать презентацию
Содержание лекции
Введение
История развития человеко-компьютерного взаимодействия
Что такое естественно-интуитивное взаимодействие
Техническое обеспечение
Сравнение современных камер
Средства
Содержание лекции
Введение
История развития человеко-компьютерного взаимодействия
Что такое естественно-интуитивное взаимодействие
Техническое обеспечение
Сравнение современных камер
Средства
Введение (1)
Электронно-вычислительные машины заняли место рядом с человеком с середины XX
Введение (1)
Электронно-вычислительные машины заняли место рядом с человеком с середины XX
Введение (2)
Разработчики стремились сделать взаимодействие с вычислительными устройствами как можно более
Введение (2)
Разработчики стремились сделать взаимодействие с вычислительными устройствами как можно более
История развития человеко-компьютерного взаимодействия (1)
Середина XX века - первые электронно-вычислительные машины
История развития человеко-компьютерного взаимодействия (1)
Середина XX века - первые электронно-вычислительные машины
ENIAC (Electronic Numerical Integrator And Calculator) проект 1943-46 гг. под руководством
ENIAC (Electronic Numerical Integrator And Calculator) проект 1943-46 гг. под руководством

Из истории развития ЭВМ
Из истории развития ЭВМ

Устройство чтения перфолент ЭВМ Mark I
(From Harvard University Cruft Photo
Устройство чтения перфолент ЭВМ Mark I
(From Harvard University Cruft Photo

Из истории развития ЭВМ
Из истории развития ЭВМ
История развития человеко-компьютерного взаимодействия (2)
1960 год - Дж.К.Р. Ликлайдер (J.R.Licklider) выдвинул
История развития человеко-компьютерного взаимодействия (2)
1960 год - Дж.К.Р. Ликлайдер (J.R.Licklider) выдвинул
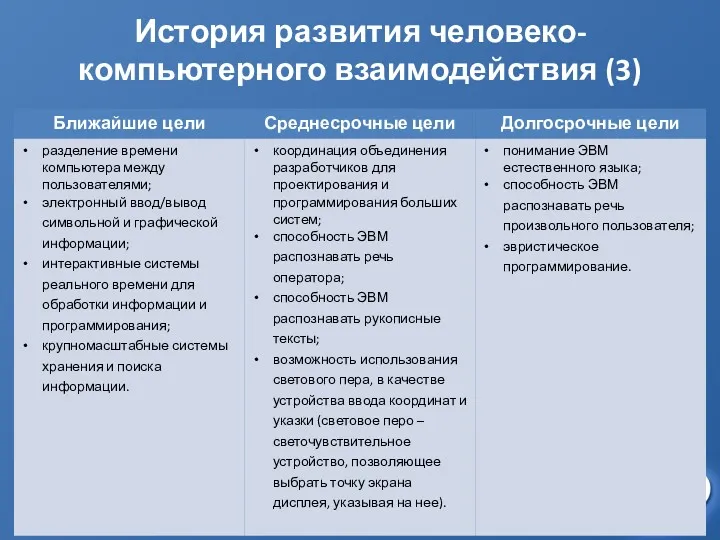
История развития человеко-компьютерного взаимодействия (3)
История развития человеко-компьютерного взаимодействия (3)
История развития человеко-компьютерного взаимодействия (4)
1963 год - Айвен Сазерленд (Ivan Sutherland)
История развития человеко-компьютерного взаимодействия (4)
1963 год - Айвен Сазерленд (Ivan Sutherland)
История развития человеко-компьютерного взаимодействия (5)
Середина 60-х годов - командой Дугласа Энгельбарта
История развития человеко-компьютерного взаимодействия (5)
Середина 60-х годов - командой Дугласа Энгельбарта
История развития человеко-компьютерного взаимодействия (6)
Как побочный эффект проекта NLS был изобретен
История развития человеко-компьютерного взаимодействия (6)
Как побочный эффект проекта NLS был изобретен
История развития человеко-компьютерного взаимодействия (7)
В 1969 году американский математик Алан Кей
История развития человеко-компьютерного взаимодействия (7)
В 1969 году американский математик Алан Кей
История развития человеко-компьютерного взаимодействия (8)
Несмотря на то, что графический интерфейс был
История развития человеко-компьютерного взаимодействия (8)
Несмотря на то, что графический интерфейс был
Человеко-компьютерное взаимодействие
Человеко-компьютерное взаимодействие (HCI, Human-Computer Interaction) – это дисциплина, имеющая
Человеко-компьютерное взаимодействие
Человеко-компьютерное взаимодействие (HCI, Human-Computer Interaction) – это дисциплина, имеющая
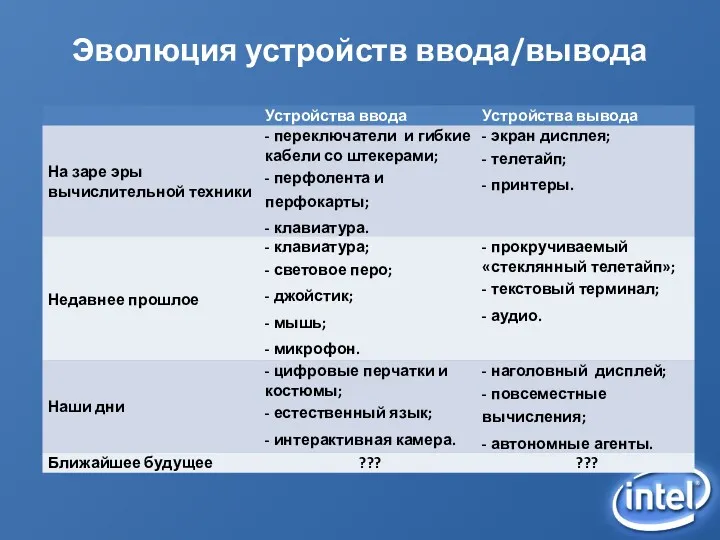
Эволюция устройств ввода/вывода
Эволюция устройств ввода/вывода
Естественно-интуитивное взаимодействие
Естественно-интуитивное взаимодействие - это эволюция в области взаимодействии с компьютером
Естественно-интуитивное взаимодействие
Естественно-интуитивное взаимодействие - это эволюция в области взаимодействии с компьютером
Техническое обеспечение (1)
Многие важные инженерные задачи должны быть решены с помощью:
-
Техническое обеспечение (1)
Многие важные инженерные задачи должны быть решены с помощью:
-
Техническое обеспечение (2)
CREATIVE
Interactive Gesture Camera
Характеристики камеры:
* Разрешение RGB сенсора: 720p
Техническое обеспечение (2)
CREATIVE
Interactive Gesture Camera
Характеристики камеры:
* Разрешение RGB сенсора: 720p
Техническое обеспечение (3)
Камера Kinect
Работа на больших дистанциях;
Идентификация и распознавание жестов и
Техническое обеспечение (3)
Камера Kinect
Работа на больших дистанциях;
Идентификация и распознавание жестов и

Техническое обеспечение (4)
Техническое обеспечение (4)

Техническое обеспечение (5)
Техническое обеспечение (5)
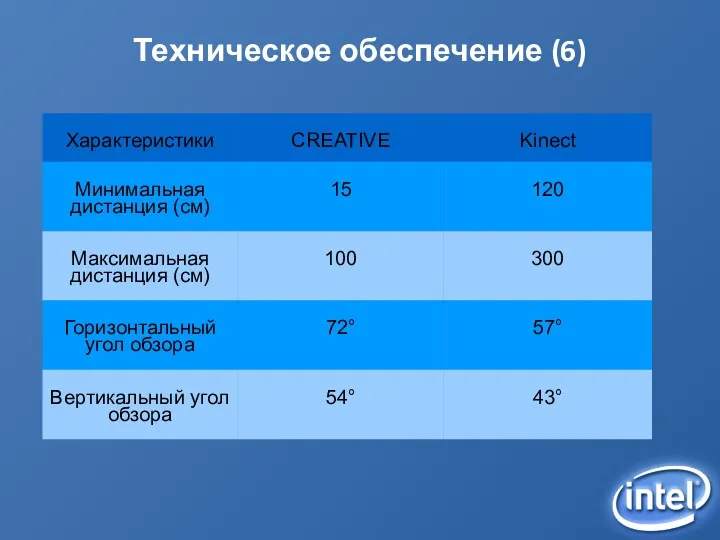
Техническое обеспечение (6)
Техническое обеспечение (6)
Средства программной разработки
Intel Perceptual Computing SDK (http://www.intel.com/software/perceptual/)
OpenCV (http://opencv.org/)
CCV (http://libccv.org/)
PCL (http://www.pointclouds.org/)
Средства программной разработки
Intel Perceptual Computing SDK (http://www.intel.com/software/perceptual/)
OpenCV (http://opencv.org/)
CCV (http://libccv.org/)
PCL (http://www.pointclouds.org/)
Intel Perceptual Computing SDK
SDK предназначен для того, чтобы снизить стоимость разработки
Intel Perceptual Computing SDK
SDK предназначен для того, чтобы снизить стоимость разработки
Особенности SDK
Приложения могут получить доступ к функциональности SDK напрямую за счет
Особенности SDK
Приложения могут получить доступ к функциональности SDK напрямую за счет
Модули обработки
Intel Perceptual Computing SDK
Модуль распознавания жестов;
Модуль распознавания лиц;
Модуль голосового управления;
Модуль
Модули обработки
Intel Perceptual Computing SDK
Модуль распознавания жестов;
Модуль распознавания лиц;
Модуль голосового управления;
Модуль
Модуль распознавания жестов (1)
Отслеживания позиций пальцев на руке (7 точек):
Кончики пальцев;
Модуль распознавания жестов (1)
Отслеживания позиций пальцев на руке (7 точек):
Кончики пальцев;
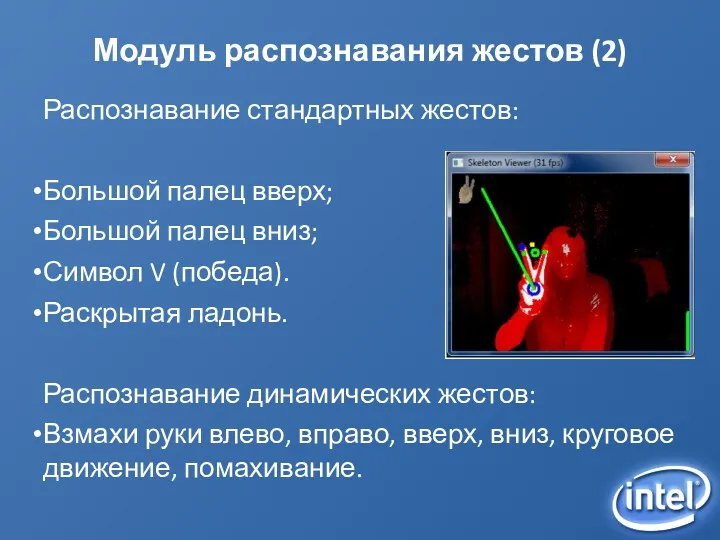
Модуль распознавания жестов (2)
Распознавание стандартных жестов:
Большой палец вверх;
Большой палец вниз;
Модуль распознавания жестов (2)
Распознавание стандартных жестов:
Большой палец вверх;
Большой палец вниз;
Основные распознаваемые позы (1)
Открытость ладони
«Большой палец вверх» или «Большой
Основные распознаваемые позы (1)
Открытость ладони
«Большой палец вверх» или «Большой
Основные распознаваемые позы (2)
Знак победы
Большая пятерка
Основные распознаваемые позы (2)
Знак победы
Большая пятерка
Основные распознаваемые жесты (1)
«Захват» и «Сброс» - Перед началом выполнения
Основные распознаваемые жесты (1)
«Захват» и «Сброс» - Перед началом выполнения
Основные распознаваемые жесты (2)
«Движение» - После захвата объекта пользователь передвигает
Основные распознаваемые жесты (2)
«Движение» - После захвата объекта пользователь передвигает
Основные распознаваемые жесты (3)
«Панорамирование» выполняется только полностью прямой ладонью. Движение
Основные распознаваемые жесты (3)
«Панорамирование» выполняется только полностью прямой ладонью. Движение
Основные распознаваемые жесты (4)
«Масштабирование» выполняется за счет изменения расстояния между
Основные распознаваемые жесты (4)
«Масштабирование» выполняется за счет изменения расстояния между
Основные распознаваемые жесты (5)
«Помахивание» - При этом жесте, пользователь быстро
Основные распознаваемые жесты (5)
«Помахивание» - При этом жесте, пользователь быстро
Основные распознаваемые жесты (6)
«Круг» - Жест круг выполняется, когда пользователь
Основные распознаваемые жесты (6)
«Круг» - Жест круг выполняется, когда пользователь
Основные распознаваемые жесты (7)
Все жесты могут быть выполнены как правой,
Основные распознаваемые жесты (7)
Все жесты могут быть выполнены как правой,
Основные распознаваемые жесты (8)
Для многих жестов, число пальцев участвующих в
Основные распознаваемые жесты (8)
Для многих жестов, число пальцев участвующих в
Модуль распознавания лиц (1)
Модуль позволяет получить большое количество информации о распознанном
Модуль распознавания лиц (1)
Модуль позволяет получить большое количество информации о распознанном

Модуль распознавания лиц (2)
Обнаружение лица
Распознавание лица
Модуль распознавания лиц (2)
Обнаружение лица
Распознавание лица
Модуль распознавания лиц (3)
Модуль позволяет получить некоторую аналитическую информацию о распознанном
Модуль распознавания лиц (3)
Модуль позволяет получить некоторую аналитическую информацию о распознанном
Модуль голосового управления
Модуль предлагает следующую функциональность:
Реализация голосовых меню;
Надиктовывание;
Синтез речи.
На
Модуль голосового управления
Модуль предлагает следующую функциональность:
Реализация голосовых меню;
Надиктовывание;
Синтез речи.
На
Модуль отслеживания двумерных и трехмерных объектов (1)
Функционал данного модуля позволяет отслеживать
Модуль отслеживания двумерных и трехмерных объектов (1)
Функционал данного модуля позволяет отслеживать
Интеграция с игровыми движками
SDK реализует несколько уровней интерфейсов, которые позволяют сразу
Интеграция с игровыми движками
SDK реализует несколько уровней интерфейсов, которые позволяют сразу
Области применения и примеры приложений (1)
Использование функций естественно-интуитивного
взаимодействия в видео
Области применения и примеры приложений (1)
Использование функций естественно-интуитивного
взаимодействия в видео
Области применения и примеры приложений (2)
- Распознавание пальцев на руках;
-
Области применения и примеры приложений (2)
- Распознавание пальцев на руках;
-
Области применения и примеры приложений (3)
Распознавание движения рук или жестов может
Области применения и примеры приложений (3)
Распознавание движения рук или жестов может

Области применения и примеры приложений (4)
Функции распознавания лица и контрольных точек
Области применения и примеры приложений (4)
Функции распознавания лица и контрольных точек
Области применения и примеры приложений (5)
Простая идентификация личности (фейс-логин).
Комбинация параметров
Области применения и примеры приложений (5)
Простая идентификация личности (фейс-логин).
Комбинация параметров

Области применения и примеры приложений (6)
Сегментация, основанная на глубине изображения, позволит
Области применения и примеры приложений (6)
Сегментация, основанная на глубине изображения, позволит

Области применения и примеры приложений (7)
Распознавание трехмерных объектов реального мира и
Области применения и примеры приложений (7)
Распознавание трехмерных объектов реального мира и
Выводы (1)
Реализация функций естественно-интуитивного взаимодействия в интерактивных приложениях позволит:
Отражать реальность, а
Выводы (1)
Реализация функций естественно-интуитивного взаимодействия в интерактивных приложениях позволит:
Отражать реальность, а
Выводы (2)
Новый подход к управлению в играх;
Идентификация личности в системах безопасности;
Сегментация
Выводы (2)
Новый подход к управлению в играх;
Идентификация личности в системах безопасности;
Сегментация
Выводы (3)
С развитием технологий обработки речи, изображений и видео, взаимодействие человека
Выводы (3)
С развитием технологий обработки речи, изображений и видео, взаимодействие человека
 Памятка терминов и определений для детей и родителей Безопасный интернет
Памятка терминов и определений для детей и родителей Безопасный интернет Оценка количества информации. Энтропия
Оценка количества информации. Энтропия Как сделать презентацию к уроку
Как сделать презентацию к уроку Хэширование (hashing). Хэш-таблицы (Hash tables)
Хэширование (hashing). Хэш-таблицы (Hash tables) Разработка web-приложений для мобильных систем
Разработка web-приложений для мобильных систем Презентация к уроку Понятие модели и моделирование
Презентация к уроку Понятие модели и моделирование Основные направления деятельности территориальных избирательных комиссий по подготовке и проведению выборов
Основные направления деятельности территориальных избирательных комиссий по подготовке и проведению выборов Автоворонка продаж. Система переработки лидов в клиентов. Ахиллесов подарок
Автоворонка продаж. Система переработки лидов в клиентов. Ахиллесов подарок Пошук файлів та папок (урок 12, 6 клас)
Пошук файлів та папок (урок 12, 6 клас) Медийное сопровождение проекта: Кампус Большого университета
Медийное сопровождение проекта: Кампус Большого университета Презентация Использование ИКТ на уроках в начальной школе
Презентация Использование ИКТ на уроках в начальной школе Электронная коммерция в интернете
Электронная коммерция в интернете Теорія кодів
Теорія кодів Информационные системы управления персоналом. Лекция 1
Информационные системы управления персоналом. Лекция 1 Digital signal processor (Цифровой сигнальный процессор),
Digital signal processor (Цифровой сигнальный процессор), Пресс-служба сети книжных магазинов Республика
Пресс-служба сети книжных магазинов Республика Протокол в криптографии
Протокол в криптографии Виды и свойства информации
Виды и свойства информации Нормативные документы об образовании в области информатики
Нормативные документы об образовании в области информатики Управление информационными системами
Управление информационными системами Эффективная презентация
Эффективная презентация Моделирование бизнес--процессов в управлении и средствами принятии решений графической нотации BPMN
Моделирование бизнес--процессов в управлении и средствами принятии решений графической нотации BPMN Программирование на Java. Collections Framework - фреймверк коллекций объектов. (Лекция 7.1)
Программирование на Java. Collections Framework - фреймверк коллекций объектов. (Лекция 7.1) Програмування та прикладні інформаційні системи
Програмування та прикладні інформаційні системи Опыт внедрения системы электронного документооборота Правительства Ульяновской области
Опыт внедрения системы электронного документооборота Правительства Ульяновской области Дерево выполнения программ
Дерево выполнения программ Решение задач ЕГЭ типа В9
Решение задач ЕГЭ типа В9 Глава 2. Деревья. Тема 3. Оптимальное дерево поиска
Глава 2. Деревья. Тема 3. Оптимальное дерево поиска