- Подпрограммы. Тема 2.2

Содержание
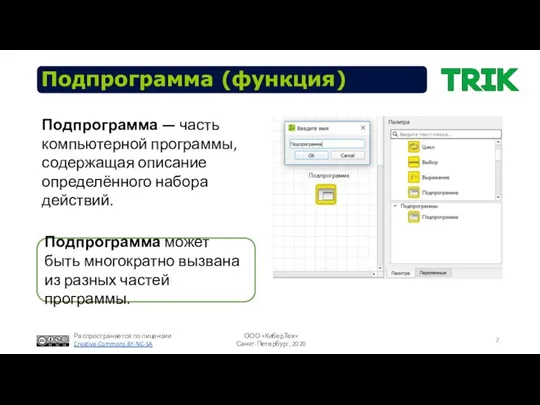
- 2. Подпрограмма (функция) Подпрограмма — часть компьютерной программы, содержащая описание определённого набора действий.
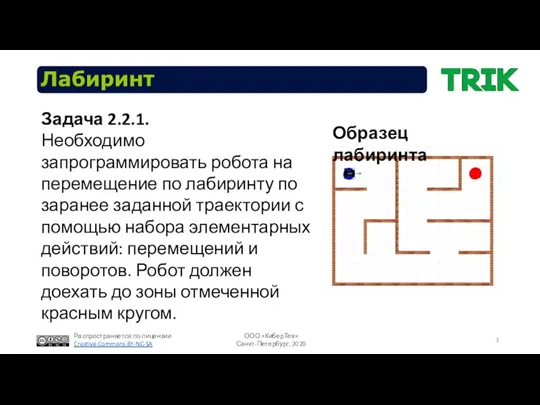
- 3. Лабиринт Задача 2.2.1. Необходимо запрограммировать робота на перемещение по лабиринту по заранее заданной траектории с помощью
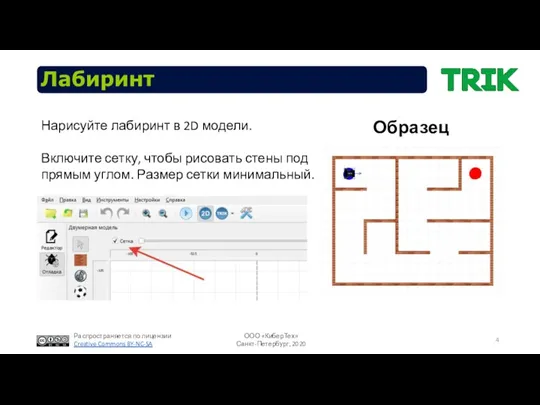
- 4. Лабиринт Образец Нарисуйте лабиринт в 2D модели. Включите сетку, чтобы рисовать стены под прямым углом. Размер
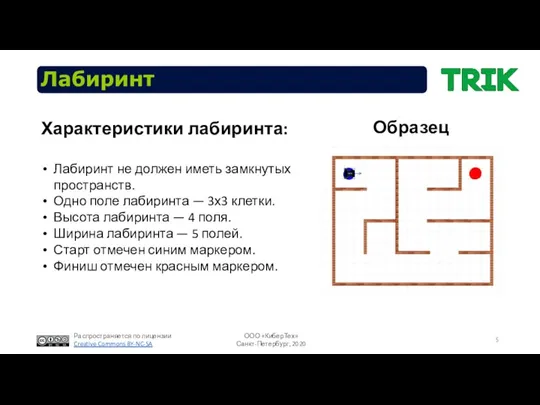
- 5. Лабиринт Образец Характеристики лабиринта: Лабиринт не должен иметь замкнутых пространств. Одно поле лабиринта — 3х3 клетки.
- 6. Принцип решения задачи Декомпозиция задачи: разбить движение на элементарные действия (движение вперед, плавные повороты и т.д)
- 7. Принцип решения задачи Декомпозиция задачи: разбить движение на элементарные действия (движение вперед, плавные повороты и т.д)
- 8. Принцип решения задачи
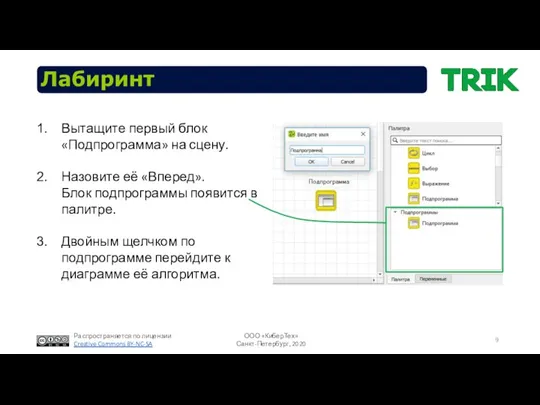
- 9. Лабиринт Вытащите первый блок «Подпрограмма» на сцену. Назовите её «Вперед». Блок подпрограммы появится в палитре. Двойным
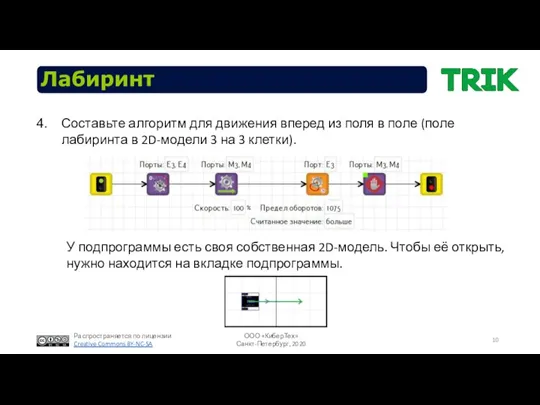
- 10. Лабиринт Составьте алгоритм для движения вперед из поля в поле (поле лабиринта в 2D-модели 3 на
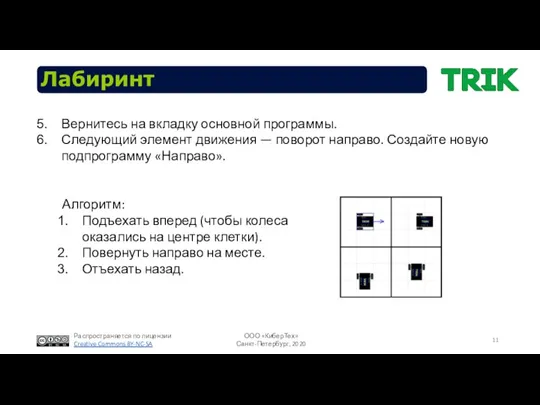
- 11. Лабиринт Алгоритм: Подъехать вперед (чтобы колеса оказались на центре клетки). Повернуть направо на месте. Отъехать назад.
- 12. Подпрограмма «Направо»
- 13. Лабиринт Аналогично составьте алгоритм подпрограммы «Налево». С помощью подпрограмм постройте движение в конечную точку.
- 14. Правило правой руки (ППР) Образец Задача 2.2.2: есть лабиринт с единственным выходом. Необходимо выйти из него,
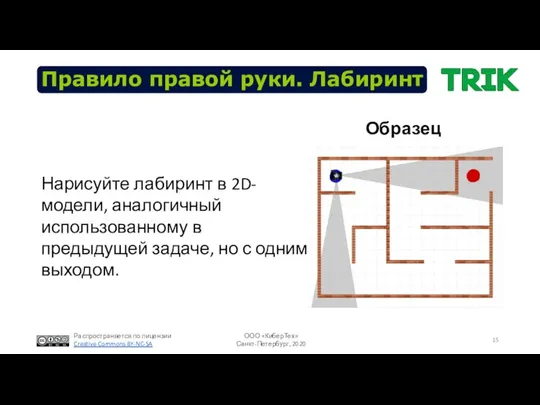
- 15. Правило правой руки. Лабиринт Образец Нарисуйте лабиринт в 2D-модели, аналогичный использованному в предыдущей задаче, но с
- 16. Правило правой руки (ППР) «Подключите» к контроллеру необходимые датчики. Подключение датчиков и моторов находится на консоли
- 17. Правило правой руки (ППР) Датчики можно вращать и перетаскивать. Выступающие за габариты тележки датчики, могут «цепляться»
- 18. Алгоритм ППР Есть ли справа стена? Повернуть направо Вперед Начало Есть ли впереди стена? Вперед Повернуть
- 19. Алгоритм ППР Датчик А1 смотрит направо, А2 - прямо
- 20. Свойства подпрограмм Задайте в подпрограмме «Вперед» параметры пути - s и скорости перемещения - v. Теперь
- 21. Задачи (самостоятельно) Задача 2.2.4: реализуйте разгон в течение 3 секунд и торможение в течение 2. Каждое
- 23. Скачать презентацию
Подпрограмма (функция)
Подпрограмма — часть компьютерной программы, содержащая описание определённого набора действий.
Подпрограмма (функция)
Подпрограмма — часть компьютерной программы, содержащая описание определённого набора действий.
Лабиринт
Задача 2.2.1.
Необходимо запрограммировать робота на перемещение по лабиринту по заранее заданной
Лабиринт
Задача 2.2.1.
Необходимо запрограммировать робота на перемещение по лабиринту по заранее заданной
Лабиринт
Образец
Нарисуйте лабиринт в 2D модели.
Включите сетку, чтобы рисовать стены под прямым
Лабиринт
Образец
Нарисуйте лабиринт в 2D модели.
Включите сетку, чтобы рисовать стены под прямым
Лабиринт
Образец
Характеристики лабиринта:
Лабиринт не должен иметь замкнутых пространств.
Одно поле лабиринта — 3х3
Лабиринт
Образец
Характеристики лабиринта:
Лабиринт не должен иметь замкнутых пространств.
Одно поле лабиринта — 3х3
Принцип решения задачи
Декомпозиция задачи: разбить движение на элементарные действия (движение вперед,
Принцип решения задачи
Декомпозиция задачи: разбить движение на элементарные действия (движение вперед,
Принцип решения задачи
Декомпозиция задачи: разбить движение на элементарные действия (движение вперед,
Принцип решения задачи
Декомпозиция задачи: разбить движение на элементарные действия (движение вперед,
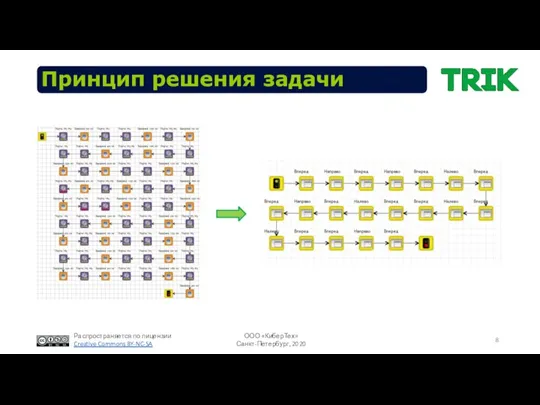
Принцип решения задачи
Принцип решения задачи
Лабиринт
Вытащите первый блок «Подпрограмма» на сцену.
Назовите её «Вперед».
Блок подпрограммы появится
Лабиринт
Вытащите первый блок «Подпрограмма» на сцену.
Назовите её «Вперед».
Блок подпрограммы появится
Лабиринт
Составьте алгоритм для движения вперед из поля в поле (поле лабиринта
Лабиринт
Составьте алгоритм для движения вперед из поля в поле (поле лабиринта
Лабиринт
Алгоритм:
Подъехать вперед (чтобы колеса оказались на центре клетки).
Повернуть направо на
Лабиринт
Алгоритм:
Подъехать вперед (чтобы колеса оказались на центре клетки).
Повернуть направо на
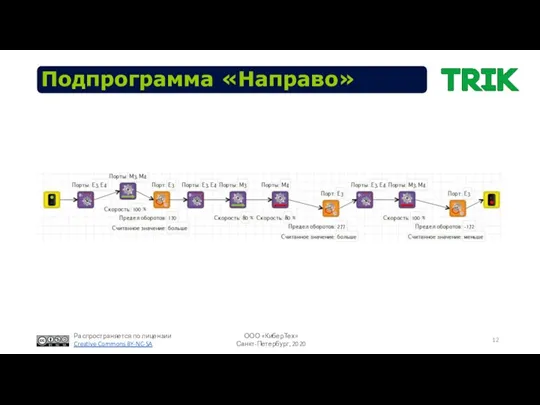
Подпрограмма «Направо»
Подпрограмма «Направо»

Лабиринт
Аналогично составьте алгоритм подпрограммы «Налево».
С помощью подпрограмм постройте движение в конечную
Лабиринт
Аналогично составьте алгоритм подпрограммы «Налево».
С помощью подпрограмм постройте движение в конечную

Правило правой руки (ППР)
Образец
Задача 2.2.2: есть лабиринт с единственным выходом.
Необходимо выйти
Правило правой руки (ППР)
Образец
Задача 2.2.2: есть лабиринт с единственным выходом.
Необходимо выйти
Правило правой руки. Лабиринт
Образец
Нарисуйте лабиринт в 2D-модели, аналогичный использованному в предыдущей
Правило правой руки. Лабиринт
Образец
Нарисуйте лабиринт в 2D-модели, аналогичный использованному в предыдущей
Правило правой руки (ППР)
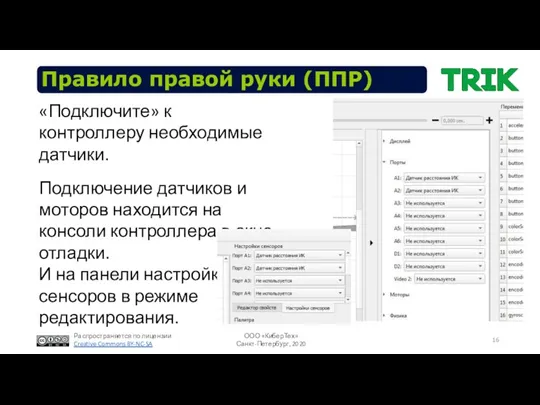
«Подключите» к контроллеру необходимые датчики.
Подключение датчиков и моторов
Правило правой руки (ППР)
«Подключите» к контроллеру необходимые датчики.
Подключение датчиков и моторов
Правило правой руки (ППР)
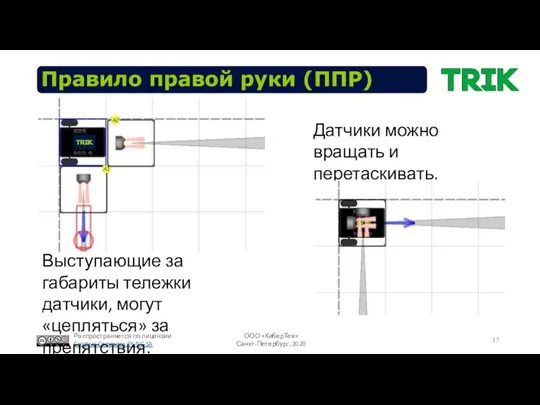
Датчики можно вращать и перетаскивать.
Выступающие за габариты тележки
Правило правой руки (ППР)
Датчики можно вращать и перетаскивать.
Выступающие за габариты тележки
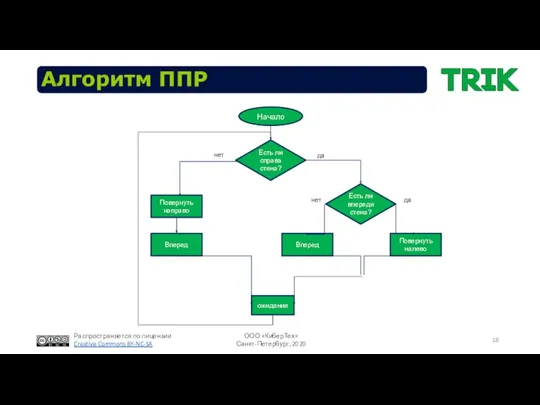
Алгоритм ППР
Есть ли справа стена?
Повернуть направо
Вперед
Начало
Есть ли впереди стена?
Вперед
Повернуть налево
ожидание
нет
нет
да
да
Алгоритм ППР
Есть ли справа стена?
Повернуть направо
Вперед
Начало
Есть ли впереди стена?
Вперед
Повернуть налево
ожидание
нет
нет
да
да
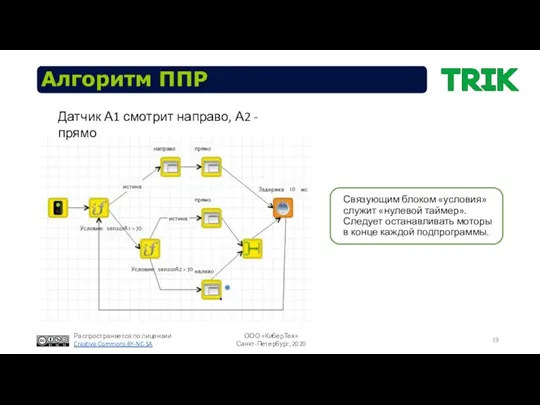
Алгоритм ППР
Датчик А1 смотрит направо, А2 - прямо
Алгоритм ППР
Датчик А1 смотрит направо, А2 - прямо
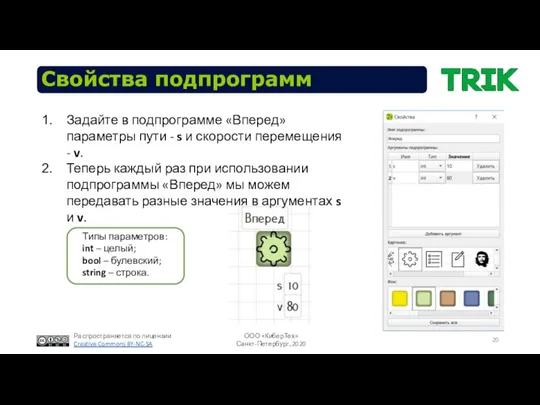
Свойства подпрограмм
Задайте в подпрограмме «Вперед» параметры пути - s и скорости
Свойства подпрограмм
Задайте в подпрограмме «Вперед» параметры пути - s и скорости
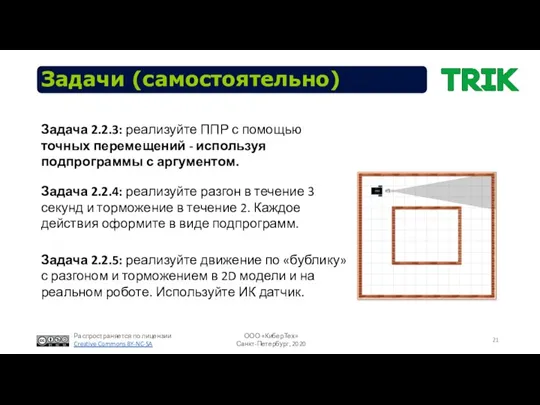
Задачи (самостоятельно)
Задача 2.2.4: реализуйте разгон в течение 3 секунд и торможение
Задачи (самостоятельно)
Задача 2.2.4: реализуйте разгон в течение 3 секунд и торможение
 2 февраля 2010 года. Городской конкурс Учитель года. 7 класс. Электронные таблицы. Формулы.
2 февраля 2010 года. Городской конкурс Учитель года. 7 класс. Электронные таблицы. Формулы. Технологии построения web-интерфейсов
Технологии построения web-интерфейсов Библиографическое описание
Библиографическое описание Компьютер и здоровье школьников
Компьютер и здоровье школьников Instagram
Instagram Особливості комп’ютерних програм, як об’єкта авторського права
Особливості комп’ютерних програм, як об’єкта авторського права Модель и моделирование
Модель и моделирование Types and Components of Computer Systems
Types and Components of Computer Systems TopLabs. Introduction to responsive design
TopLabs. Introduction to responsive design Процедуры обработки пиксельной (точечной) графики
Процедуры обработки пиксельной (точечной) графики Systemy informacyjne w zarządzaniu
Systemy informacyjne w zarządzaniu Учителя, родители и дети в цифровом пространстве
Учителя, родители и дети в цифровом пространстве Основы реляционной алгебры
Основы реляционной алгебры Верстальщик сайтов
Верстальщик сайтов Безопасный интернет
Безопасный интернет Правила заполнения ежемесячной отчетности партнеров по непродленным договорам ИТС
Правила заполнения ежемесячной отчетности партнеров по непродленным договорам ИТС Новогодняя открытка
Новогодняя открытка Оценка официальных пабликов Хабаровского края. Экспертное интервью
Оценка официальных пабликов Хабаровского края. Экспертное интервью Дидактические свойства и функции Microsoft Office
Дидактические свойства и функции Microsoft Office Влияние сети Интернет на состояние психологичского здоровья студенческой молодежи
Влияние сети Интернет на состояние психологичского здоровья студенческой молодежи Информация и информационные процессы
Информация и информационные процессы Виды баз данных БД
Виды баз данных БД Кодовые таблицы
Кодовые таблицы Комбинаторика и программирование
Комбинаторика и программирование Источники географической информации
Источники географической информации LDI Plus Presentation EN
LDI Plus Presentation EN Алгоритмы. Свойства алгоритма
Алгоритмы. Свойства алгоритма Сервисы Интернет. Компьютерные телекоммуникации
Сервисы Интернет. Компьютерные телекоммуникации