- Ray Casting

Содержание
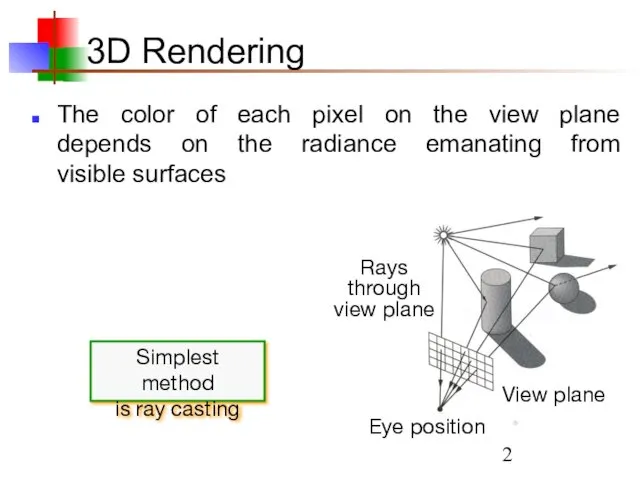
- 2. 3D Rendering The color of each pixel on the view plane depends on the radiance emanating
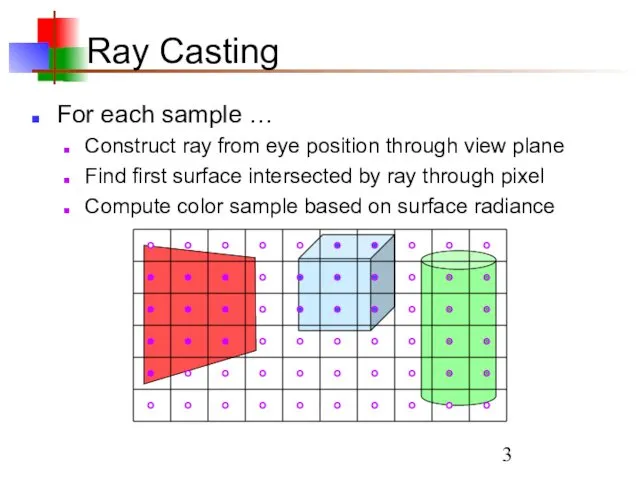
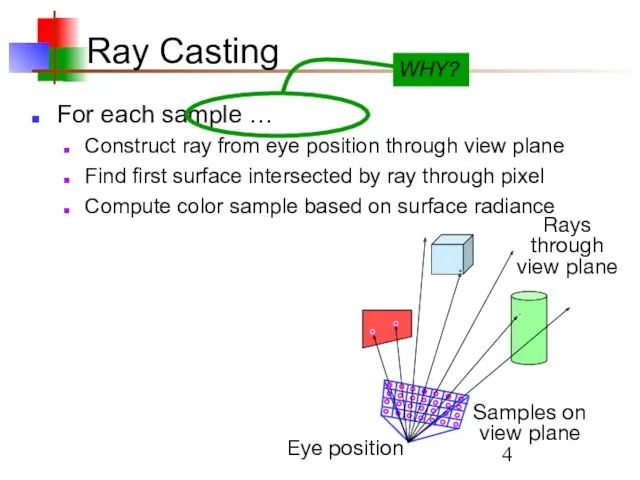
- 3. Ray Casting For each sample … Construct ray from eye position through view plane Find first
- 4. Ray Casting For each sample … Construct ray from eye position through view plane Find first
- 5. Ray casting != Ray tracing Ray casting does not handle reflections These can be “faked” by
- 6. Compare to “real-time” graphics The 3-D scene is “flattened” into a 2-D view plane Ray tracing
- 7. Rendered without raytracing
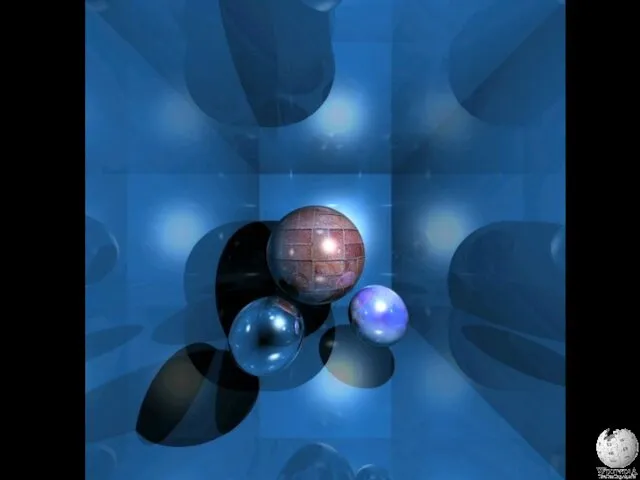
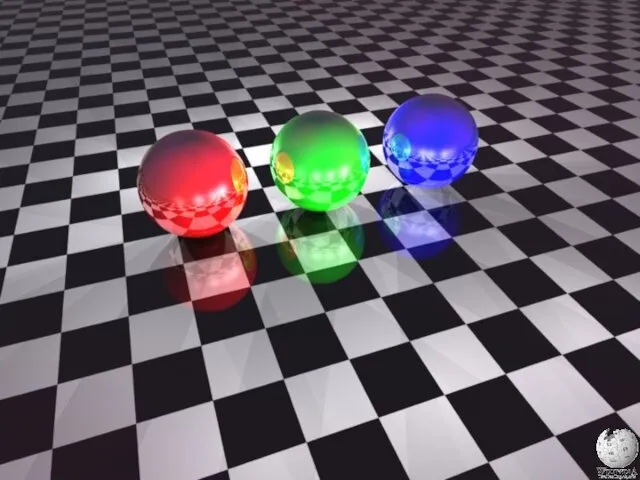
- 8. Rendered with raytracing
- 12. Ray Casting Simple implementation: Image RayCast(Camera camera, Scene scene, int width, int height) { Image image
- 13. Ray Casting Simple implementation: Image RayCast(Camera camera, Scene scene, int width, int height) { Image image
- 14. Constructing Ray Through a Pixel right back Up direction P0 towards View Plane P V Ray:
- 15. Constructing Ray Through a Pixel 2D Example d Θ towards P0 right right = towards x
- 16. Ray Casting Simple implementation: Image RayCast(Camera camera, Scene scene, int width, int height) { Image image
- 17. Ray-Scene Intersection Intersections with geometric primitives Sphere Triangle Groups of primitives (scene) Acceleration techniques Bounding volume
- 18. Ray-Sphere Intersection Ray: P = P0 + tV Sphere: |P - C|2 - r 2 =
- 19. Ray-Sphere Intersection Ray: P = P0 + tV Sphere: (x - cx)2 + (y - cy)2
- 20. Ray-Sphere Intersection P0 V C P r N = (P - C) / |P - C|
- 21. Ray-Scene Intersection Intersections with geometric primitives Sphere Triangle Groups of primitives (scene) Acceleration techniques Bounding volume
- 22. Ray-Triangle Intersection First, intersect ray with plane Then, check if point is inside triangle P P0
- 23. Ray-Plane Intersection Ray: P = P0 + tV Plane: ax + by + cz + d
- 24. Ray-Triangle Intersection I Check if point is inside triangle geometrically First, find ray intersection point on
- 25. SameSide(p1,p2, a,b): cp1 = Cross (b-a, p1-a) cp2 = Cross (b-a, p2-a) return Dot (cp1, cp2)
- 26. Ray-Triangle Intersection III Check if point is inside triangle parametrically First, find ray intersection point on
- 27. Other Ray-Primitive Intersections Cone, cylinder, ellipsoid: Similar to sphere Box Intersect front-facing planes (max 3!), return
- 28. Ray-Scene Intersection Find intersection with front-most primitive in group A B C D E F Intersection
- 29. Ray-Scene Intersection Intersections with geometric primitives Sphere Triangle Groups of primitives (scene) Acceleration techniques Bounding volume
- 30. Bounding Volumes Check for intersection with simple shape first If ray doesn’t intersect bounding volume, then
- 31. Bounding Volume Hierarchies I Build hierarchy of bounding volumes Bounding volume of interior node contains all
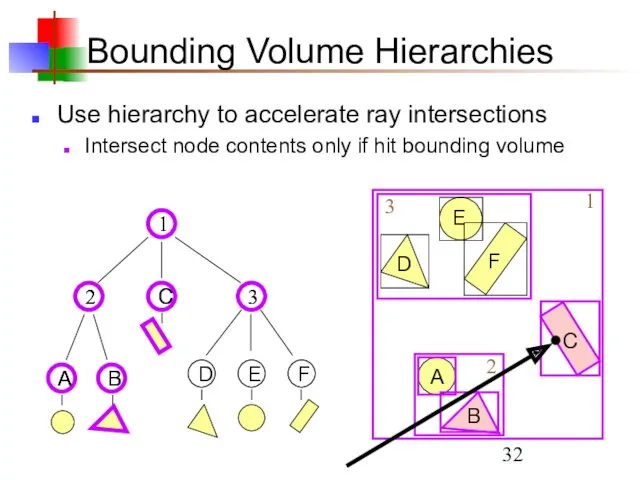
- 32. Bounding Volume Hierarchies Use hierarchy to accelerate ray intersections Intersect node contents only if hit bounding
- 33. Bounding Volume Hierarchies III FindIntersection(Ray ray, Node node) { // Find intersections with child node bounding
- 34. Ray-Scene Intersection Intersections with geometric primitives Sphere Triangle Groups of primitives (scene) Acceleration techniques Bounding volume
- 35. Uniform Grid Construct uniform grid over scene Index primitives according to overlaps with grid cells A
- 36. Uniform Grid Trace rays through grid cells Fast Incremental A B C D E F Only
- 37. Uniform Grid Potential problem: How choose suitable grid resolution? A B C D E F Too
- 38. Ray-Scene Intersection Intersections with geometric primitives Sphere Triangle Groups of primitives (scene) Acceleration techniques Bounding volume
- 39. Octree Construct adaptive grid over scene Recursively subdivide box-shaped cells into 8 octants Index primitives by
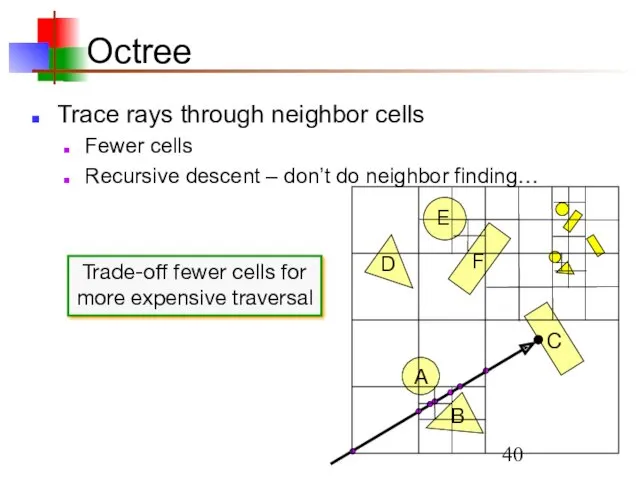
- 40. Octree Trace rays through neighbor cells Fewer cells Recursive descent – don’t do neighbor finding… A
- 41. Ray-Scene Intersection Intersections with geometric primitives Sphere Triangle Groups of primitives (scene) Acceleration techniques Bounding volume
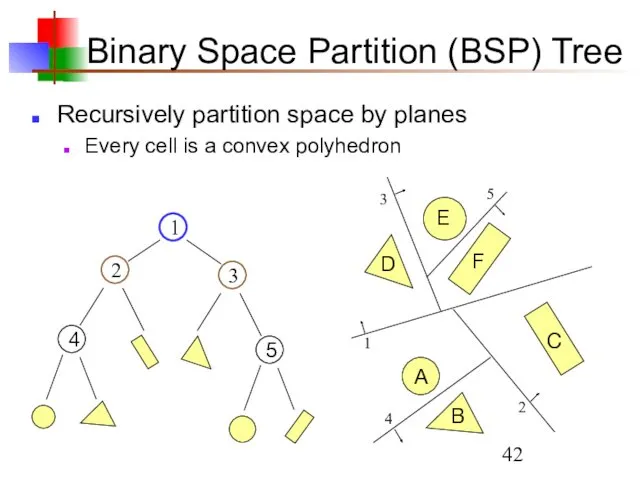
- 42. Binary Space Partition (BSP) Tree Recursively partition space by planes Every cell is a convex polyhedron
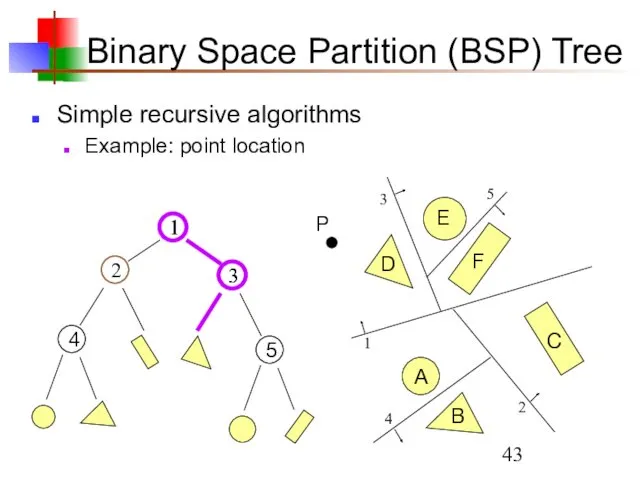
- 43. Binary Space Partition (BSP) Tree Simple recursive algorithms Example: point location A B C D E
- 44. Binary Space Partition (BSP) Tree Trace rays by recursion on tree BSP construction enables simple front-to-back
- 45. BSP Demo http://symbolcraft.com/graphics/bsp/
- 46. First game-based use of BSP trees Doom (ID Software)
- 47. Other Accelerations Screen space coherence Check last hit first Beam tracing Pencil tracing Cone tracing Memory
- 48. Acceleration Intersection acceleration techniques are important Bounding volume hierarchies Spatial partitions General concepts Sort objects spatially
- 49. Summary Writing a simple ray casting renderer is “easy” Generate rays Intersection tests Lighting calculations Image
- 50. Heckbert’s business card ray tracer typedef struct{double x,y,z}vec;vec U,black,amb={.02,.02,.02};struct sphere{ vec cen,color; double rad,kd,ks,kt,kl,ir}*s,*best,sph[]={0.,6.,.5,1.,1.,1.,.9, .05,.2,.85,0.,1.7,-1.,8.,-.5,1.,.5,.2,1., .7,.3,0.,.05,1.2,1.,8.,-.5,.1,.8,.8,
- 52. Скачать презентацию
3D Rendering
The color of each pixel on the view plane
depends on
3D Rendering
The color of each pixel on the view plane depends on
Ray Casting
For each sample …
Construct ray from eye position through view
Ray Casting
For each sample …
Construct ray from eye position through view
Ray Casting
For each sample …
Construct ray from eye position through view
Ray Casting
For each sample …
Construct ray from eye position through view
Ray casting != Ray tracing
Ray casting does not handle reflections
These can
Ray casting != Ray tracing
Ray casting does not handle reflections
These can
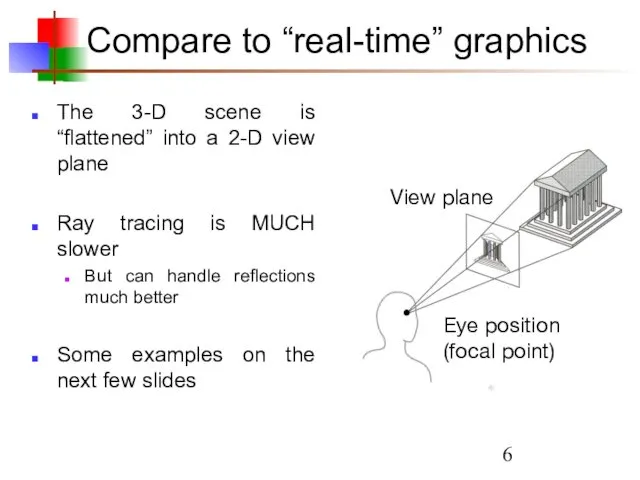
Compare to “real-time” graphics
The 3-D scene is “flattened” into a 2-D
Compare to “real-time” graphics
The 3-D scene is “flattened” into a 2-D

Rendered without raytracing
Rendered without raytracing
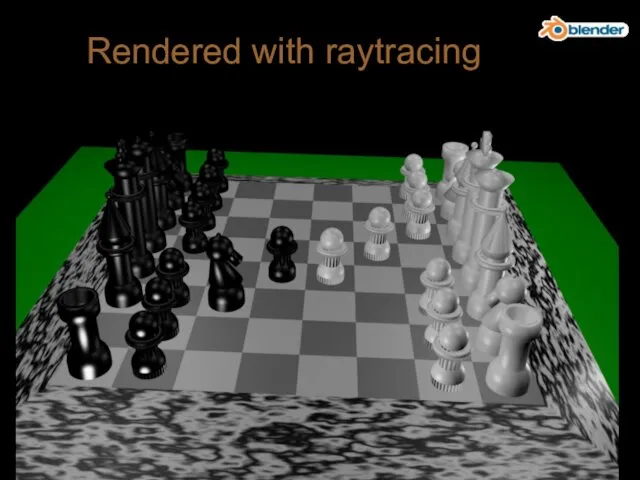
Rendered with raytracing
Rendered with raytracing

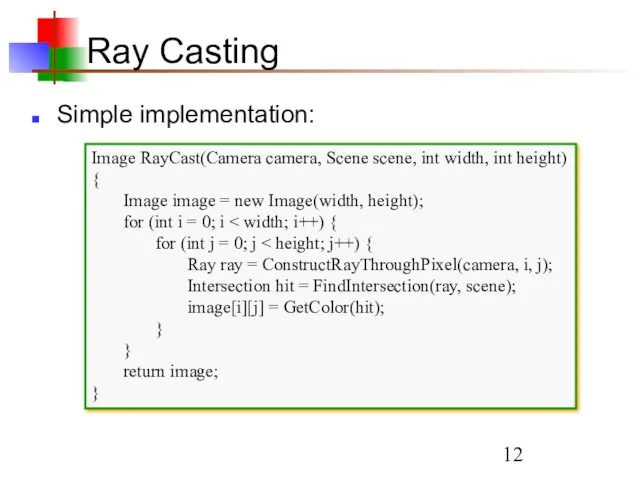
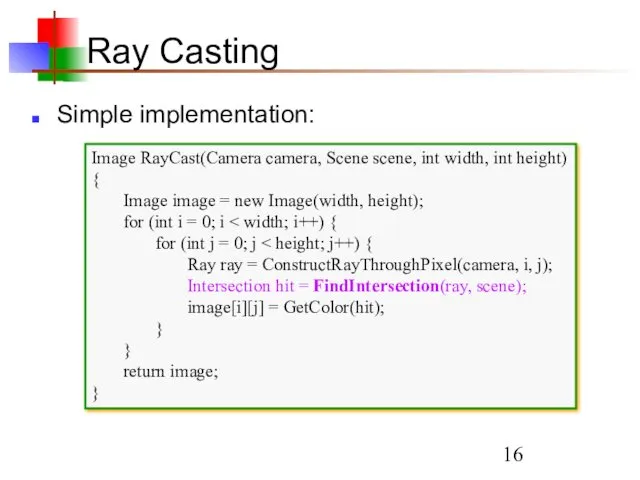
Ray Casting
Simple implementation:
Image RayCast(Camera camera, Scene scene, int width, int height)
{
Image
Ray Casting
Simple implementation:
Image RayCast(Camera camera, Scene scene, int width, int height)
{
Image
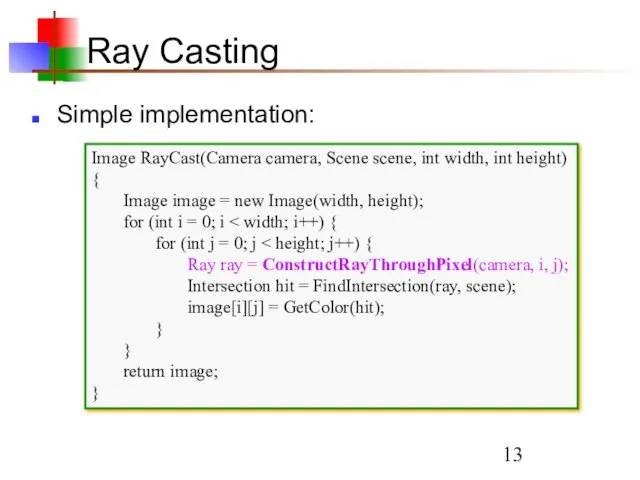
Ray Casting
Simple implementation:
Image RayCast(Camera camera, Scene scene, int width, int height)
{
Image
Ray Casting
Simple implementation:
Image RayCast(Camera camera, Scene scene, int width, int height)
{
Image
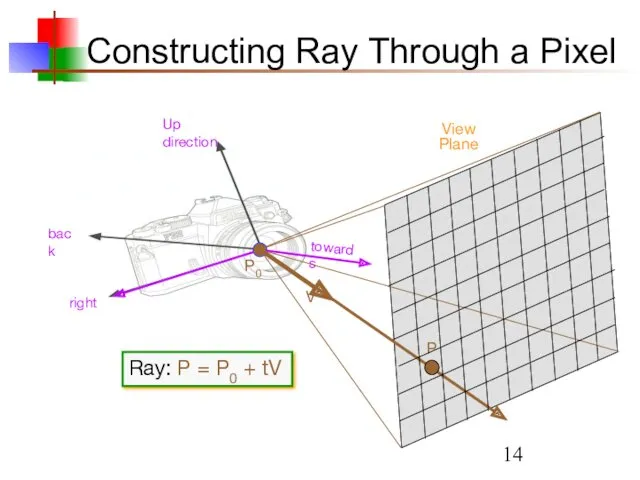
Constructing Ray Through a Pixel
right
back
Up direction
P0
towards
View
Plane
P
V
Ray: P = P0 + tV
Constructing Ray Through a Pixel
right
back
Up direction
P0
towards
View
Plane
P
V
Ray: P = P0 + tV
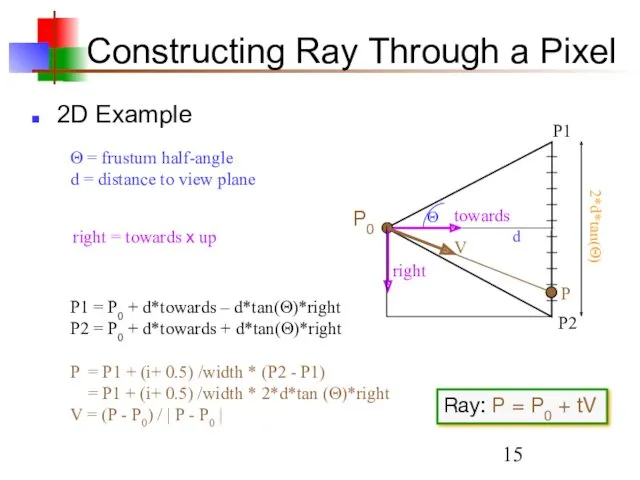
Constructing Ray Through a Pixel
2D Example
d
Θ
towards
P0
right
right = towards x up
Θ =
Constructing Ray Through a Pixel
2D Example
d
Θ
towards
P0
right
right = towards x up
Θ =
Ray Casting
Simple implementation:
Image RayCast(Camera camera, Scene scene, int width, int height)
{
Image
Ray Casting
Simple implementation:
Image RayCast(Camera camera, Scene scene, int width, int height)
{
Image
Ray-Scene Intersection
Intersections with geometric primitives
Sphere
Triangle
Groups of primitives (scene)
Acceleration techniques
Bounding volume hierarchies
Spatial
Ray-Scene Intersection
Intersections with geometric primitives
Sphere
Triangle
Groups of primitives (scene)
Acceleration techniques
Bounding volume hierarchies
Spatial
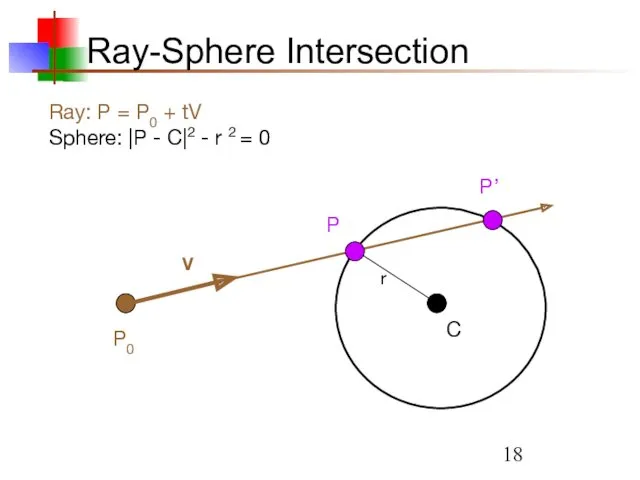
Ray-Sphere Intersection
Ray: P = P0 + tV
Sphere: |P - C|2 -
Ray-Sphere Intersection
Ray: P = P0 + tV
Sphere: |P - C|2 -
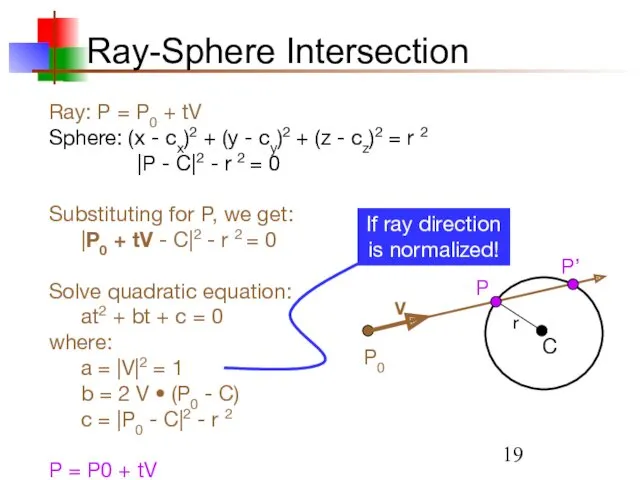
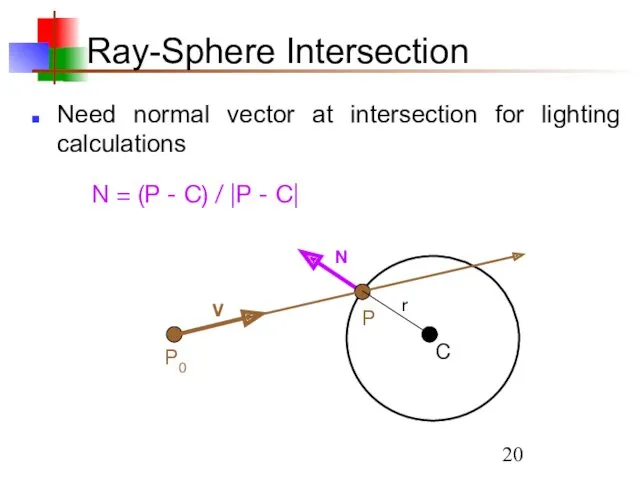
Ray-Sphere Intersection
Ray: P = P0 + tV
Sphere: (x - cx)2 +
Ray-Sphere Intersection
Ray: P = P0 + tV
Sphere: (x - cx)2 +
Ray-Sphere Intersection
P0
V
C
P
r
N = (P - C) / |P - C|
N
Need normal
Ray-Sphere Intersection
P0
V
C
P
r
N = (P - C) / |P - C|
N
Need normal
Ray-Scene Intersection
Intersections with geometric primitives
Sphere
Triangle
Groups of primitives (scene)
Acceleration techniques
Bounding volume hierarchies
Spatial
Ray-Scene Intersection
Intersections with geometric primitives
Sphere
Triangle
Groups of primitives (scene)
Acceleration techniques
Bounding volume hierarchies
Spatial
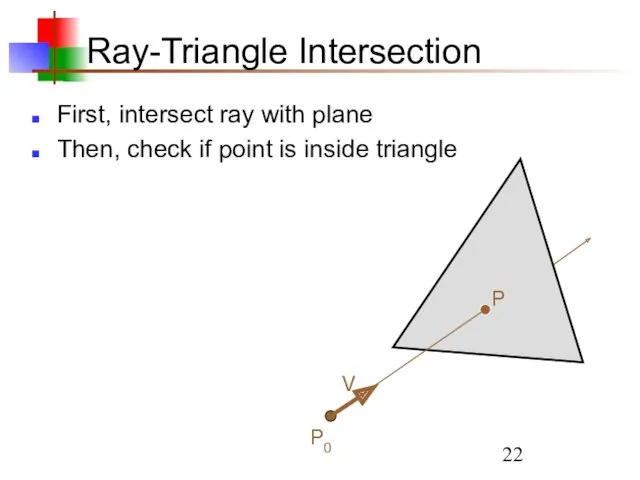
Ray-Triangle Intersection
First, intersect ray with plane
Then, check if point is inside
Ray-Triangle Intersection
First, intersect ray with plane
Then, check if point is inside
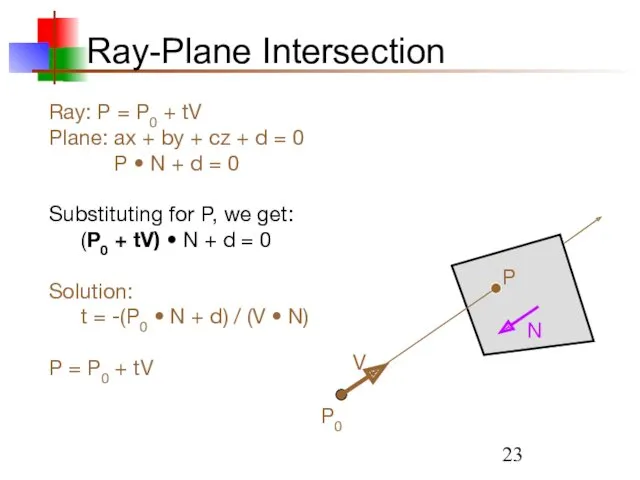
Ray-Plane Intersection
Ray: P = P0 + tV
Plane: ax + by +
Ray-Plane Intersection
Ray: P = P0 + tV
Plane: ax + by +
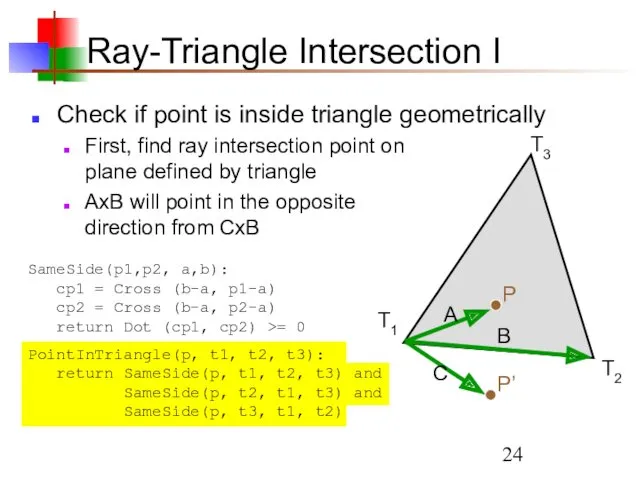
Ray-Triangle Intersection I
Check if point is inside triangle geometrically
First, find ray
Ray-Triangle Intersection I
Check if point is inside triangle geometrically
First, find ray
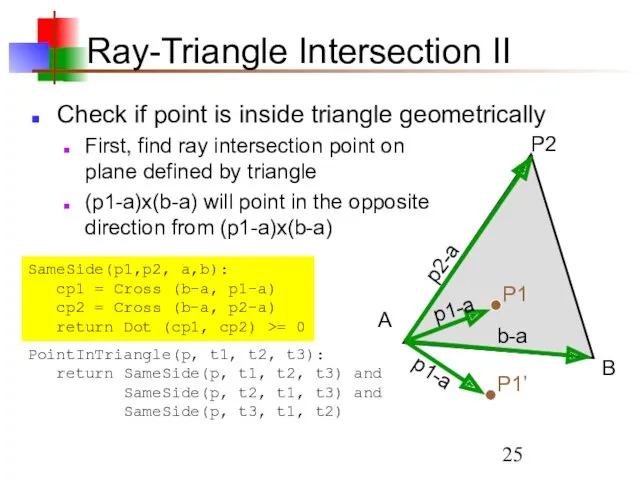
SameSide(p1,p2, a,b): cp1 = Cross (b-a, p1-a)
cp2 = Cross (b-a,
SameSide(p1,p2, a,b): cp1 = Cross (b-a, p1-a) cp2 = Cross (b-a,
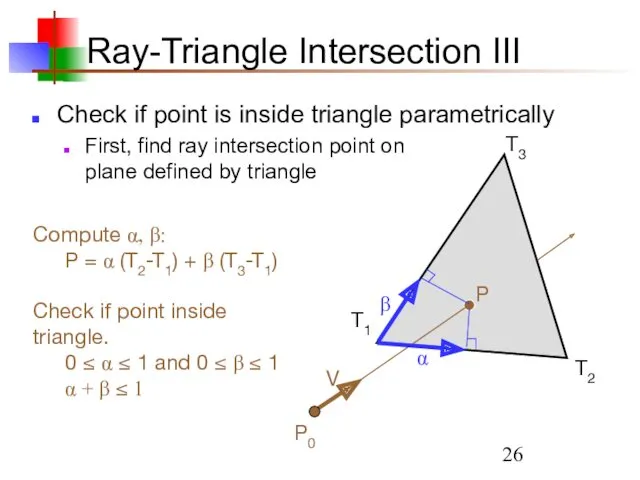
Ray-Triangle Intersection III
Check if point is inside triangle parametrically
First, find ray
Ray-Triangle Intersection III
Check if point is inside triangle parametrically
First, find ray
Other Ray-Primitive Intersections
Cone, cylinder, ellipsoid:
Similar to sphere
Box
Intersect front-facing planes (max 3!),
Other Ray-Primitive Intersections
Cone, cylinder, ellipsoid:
Similar to sphere
Box
Intersect front-facing planes (max 3!),
Ray-Scene Intersection
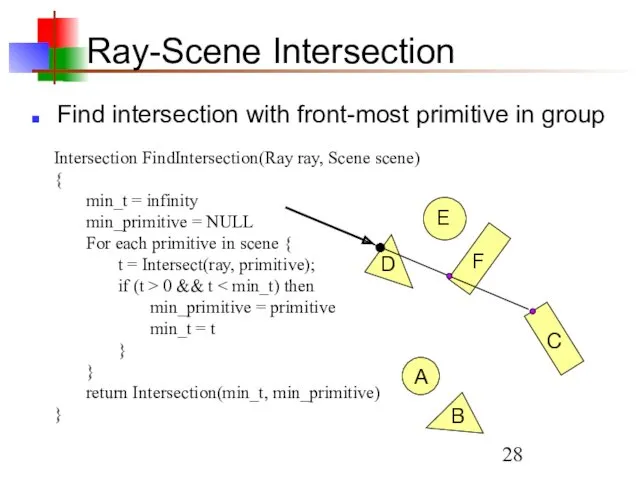
Find intersection with front-most primitive in group
A
B
C
D
E
F
Intersection FindIntersection(Ray ray, Scene
Ray-Scene Intersection
Find intersection with front-most primitive in group
A
B
C
D
E
F
Intersection FindIntersection(Ray ray, Scene
Ray-Scene Intersection
Intersections with geometric primitives
Sphere
Triangle
Groups of primitives (scene)
Acceleration techniques
Bounding volume hierarchies
Spatial
Ray-Scene Intersection
Intersections with geometric primitives
Sphere
Triangle
Groups of primitives (scene)
Acceleration techniques
Bounding volume hierarchies
Spatial
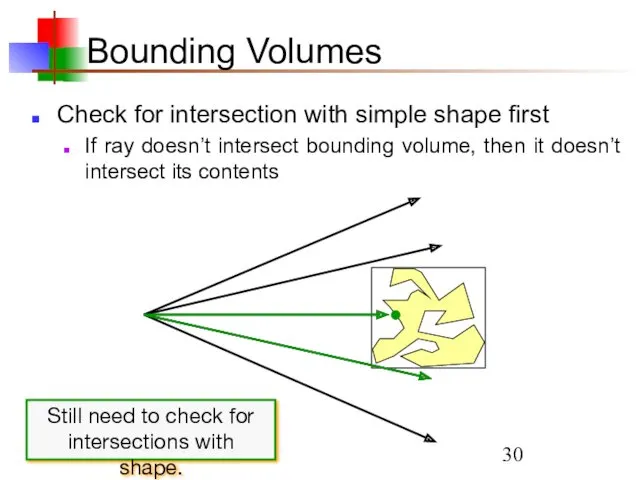
Bounding Volumes
Check for intersection with simple shape first
If ray doesn’t intersect
Bounding Volumes
Check for intersection with simple shape first
If ray doesn’t intersect
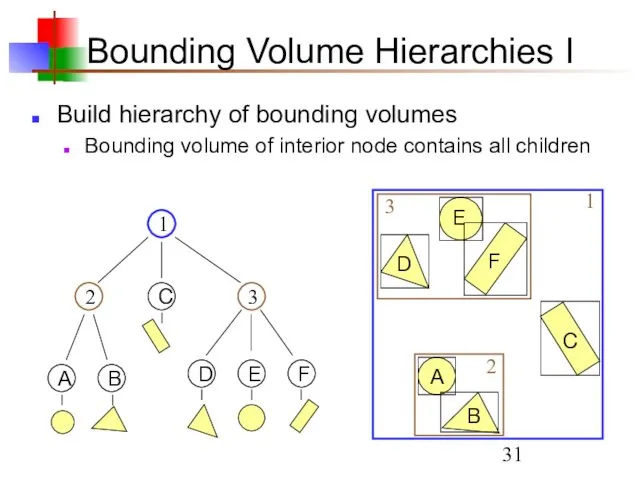
Bounding Volume Hierarchies I
Build hierarchy of bounding volumes
Bounding volume of interior
Bounding Volume Hierarchies I
Build hierarchy of bounding volumes
Bounding volume of interior
Bounding Volume Hierarchies
Use hierarchy to accelerate ray intersections
Intersect node contents only
Bounding Volume Hierarchies
Use hierarchy to accelerate ray intersections
Intersect node contents only
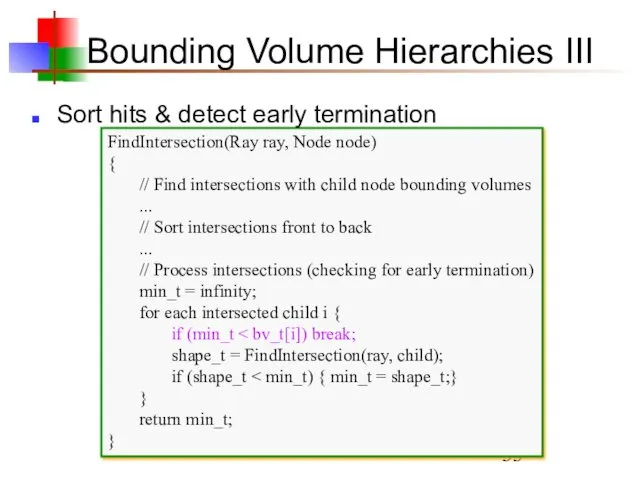
Bounding Volume Hierarchies III
FindIntersection(Ray ray, Node node)
{
// Find intersections with child
Bounding Volume Hierarchies III
FindIntersection(Ray ray, Node node)
{
// Find intersections with child
Ray-Scene Intersection
Intersections with geometric primitives
Sphere
Triangle
Groups of primitives (scene)
Acceleration techniques
Bounding volume hierarchies
Spatial
Ray-Scene Intersection
Intersections with geometric primitives
Sphere
Triangle
Groups of primitives (scene)
Acceleration techniques
Bounding volume hierarchies
Spatial
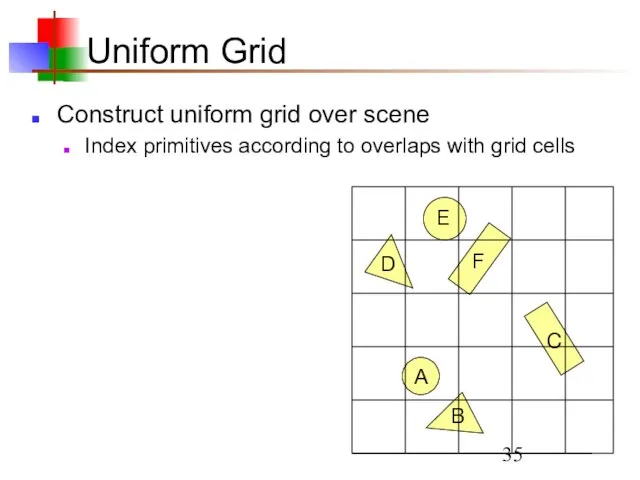
Uniform Grid
Construct uniform grid over scene
Index primitives according to overlaps with
Uniform Grid
Construct uniform grid over scene
Index primitives according to overlaps with
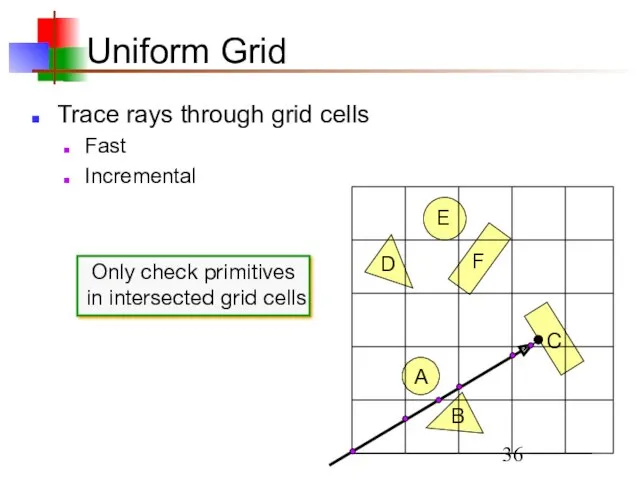
Uniform Grid
Trace rays through grid cells
Fast
Incremental
A
B
C
D
E
F
Only check primitives
in intersected grid
Uniform Grid
Trace rays through grid cells
Fast
Incremental
A
B
C
D
E
F
Only check primitives
in intersected grid
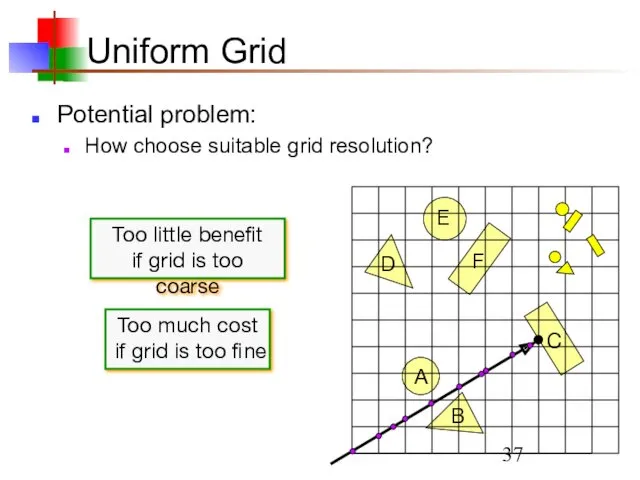
Uniform Grid
Potential problem:
How choose suitable grid resolution?
A
B
C
D
E
F
Too little benefit
if grid
Uniform Grid
Potential problem:
How choose suitable grid resolution?
A
B
C
D
E
F
Too little benefit
if grid
Ray-Scene Intersection
Intersections with geometric primitives
Sphere
Triangle
Groups of primitives (scene)
Acceleration techniques
Bounding volume hierarchies
Spatial
Ray-Scene Intersection
Intersections with geometric primitives
Sphere
Triangle
Groups of primitives (scene)
Acceleration techniques
Bounding volume hierarchies
Spatial
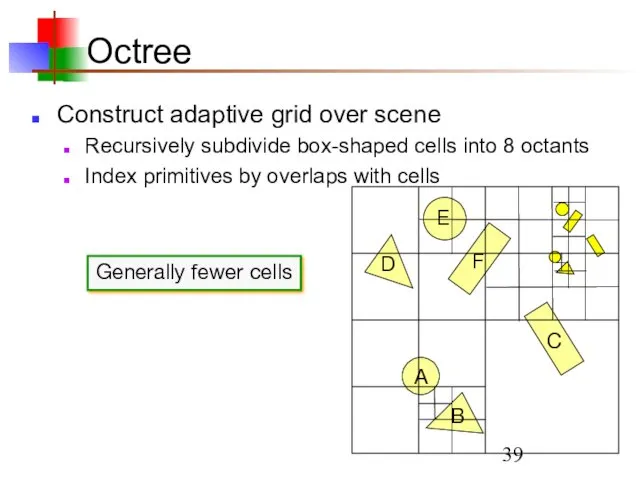
Octree
Construct adaptive grid over scene
Recursively subdivide box-shaped cells into 8 octants
Index
Octree
Construct adaptive grid over scene
Recursively subdivide box-shaped cells into 8 octants
Index
Octree
Trace rays through neighbor cells
Fewer cells
Recursive descent – don’t do neighbor
Octree
Trace rays through neighbor cells
Fewer cells
Recursive descent – don’t do neighbor
Ray-Scene Intersection
Intersections with geometric primitives
Sphere
Triangle
Groups of primitives (scene)
Acceleration techniques
Bounding volume hierarchies
Spatial
Ray-Scene Intersection
Intersections with geometric primitives
Sphere
Triangle
Groups of primitives (scene)
Acceleration techniques
Bounding volume hierarchies
Spatial
Binary Space Partition (BSP) Tree
Recursively partition space by planes
Every cell is
Binary Space Partition (BSP) Tree
Recursively partition space by planes
Every cell is
Binary Space Partition (BSP) Tree
Simple recursive algorithms
Example: point location
A
B
C
D
E
F
1
2
3
1
2
4
4
3
5
5
P
Binary Space Partition (BSP) Tree
Simple recursive algorithms
Example: point location
A
B
C
D
E
F
1
2
3
1
2
4
4
3
5
5
P
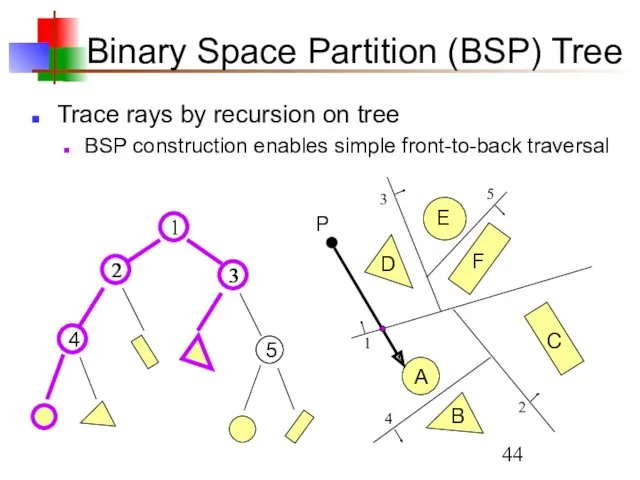
Binary Space Partition (BSP) Tree
Trace rays by recursion on tree
BSP construction
Binary Space Partition (BSP) Tree
Trace rays by recursion on tree
BSP construction
BSP Demo
http://symbolcraft.com/graphics/bsp/
BSP Demo
http://symbolcraft.com/graphics/bsp/
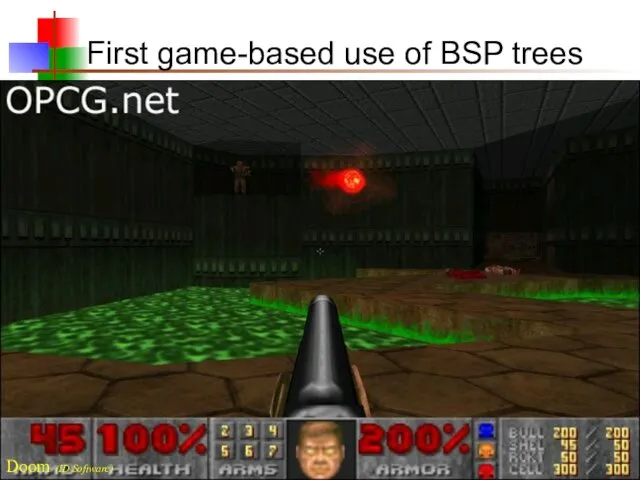
First game-based use of BSP trees
Doom (ID Software)
First game-based use of BSP trees
Doom (ID Software)
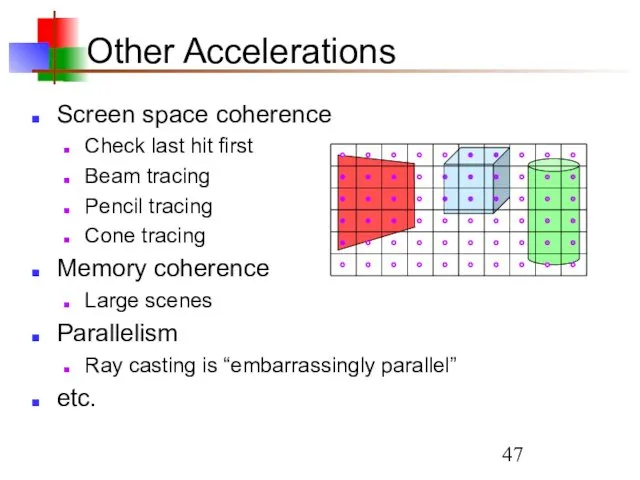
Other Accelerations
Screen space coherence
Check last hit first
Beam tracing
Pencil tracing
Cone tracing
Memory coherence
Large
Other Accelerations
Screen space coherence
Check last hit first
Beam tracing
Pencil tracing
Cone tracing
Memory coherence
Large
Acceleration
Intersection acceleration techniques are important
Bounding volume hierarchies
Spatial partitions
General concepts
Sort objects spatially
Make
Acceleration
Intersection acceleration techniques are important
Bounding volume hierarchies
Spatial partitions
General concepts
Sort objects spatially
Make
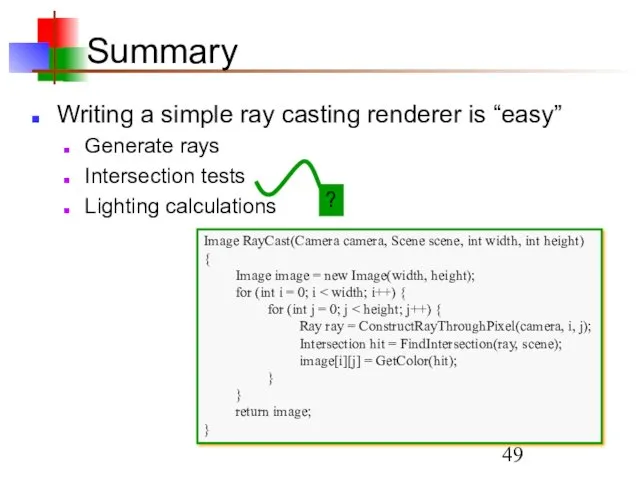
Summary
Writing a simple ray casting renderer is “easy”
Generate rays
Intersection tests
Lighting calculations
Image
Summary
Writing a simple ray casting renderer is “easy”
Generate rays
Intersection tests
Lighting calculations
Image
Heckbert’s business card ray tracer
typedef struct{double x,y,z}vec;vec U,black,amb={.02,.02,.02};struct sphere{ vec cen,color;
double
Heckbert’s business card ray tracer
typedef struct{double x,y,z}vec;vec U,black,amb={.02,.02,.02};struct sphere{ vec cen,color; double
 Опыт подсчета запасов золоторудного месторождения Узбекистана с использованием программного обеспечения Мicromine
Опыт подсчета запасов золоторудного месторождения Узбекистана с использованием программного обеспечения Мicromine Організація управління мережами зв’язку
Організація управління мережами зв’язку Редактирование изображений. 2 часть
Редактирование изображений. 2 часть Локальна мережа. Гра Допуск
Локальна мережа. Гра Допуск Мультиплексирование данных в стандарте MPEG-2
Мультиплексирование данных в стандарте MPEG-2 Управление ремонтами и обслуживанием оборудования решение на основе 1С:Предприятие 8
Управление ремонтами и обслуживанием оборудования решение на основе 1С:Предприятие 8 Коммуникационные программы
Коммуникационные программы Популярные Мемы из видеоигр
Популярные Мемы из видеоигр Avast антивирусная программа
Avast антивирусная программа Software, programming language, operating system. Lecture 3
Software, programming language, operating system. Lecture 3 Табличный процессор Microsoft Excel 2007
Табличный процессор Microsoft Excel 2007 Назначение и возможности табличного процессора MS Excel
Назначение и возможности табличного процессора MS Excel Передача информации (в датах)
Передача информации (в датах) Элементы объектно-ориентированного программирования
Элементы объектно-ориентированного программирования Основные функциональные возможности информационно-поисковой системы Эталон версии 6.7
Основные функциональные возможности информационно-поисковой системы Эталон версии 6.7 Использование программы ZOOM. Исламская онлайн-школа
Использование программы ZOOM. Исламская онлайн-школа Формування багатотабличного SQL-запиту
Формування багатотабличного SQL-запиту Жанры журналистики. Лекция №4. Корреспонденция как жанр аналитической журналистики
Жанры журналистики. Лекция №4. Корреспонденция как жанр аналитической журналистики Особливості політичного впливу ЗМІ
Особливості політичного впливу ЗМІ Переменные и типы данных в C#. (Модуль 2)
Переменные и типы данных в C#. (Модуль 2) Решение вычислительных задач на компьютере (язык С++)
Решение вычислительных задач на компьютере (язык С++)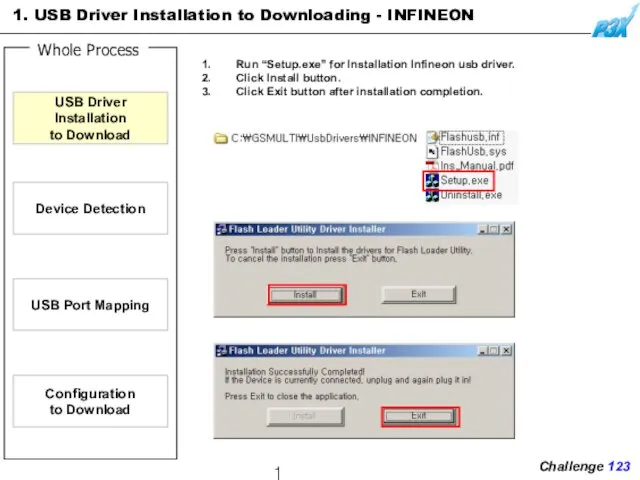 Install USB Driver and Set Mapping
Install USB Driver and Set Mapping Компьютерные сети (§44-50)
Компьютерные сети (§44-50) Система адресації в Internet. Протокол TCP/IP. Числові та символічні адреси DNS
Система адресації в Internet. Протокол TCP/IP. Числові та символічні адреси DNS Проблема информационной безопасности
Проблема информационной безопасности Кодирование и декодирование информации
Кодирование и декодирование информации Мобильное приложение для ЮЛ и ИП. Мобильный бизнес клиент
Мобильное приложение для ЮЛ и ИП. Мобильный бизнес клиент Программирование на PHP 5. Функции
Программирование на PHP 5. Функции