- sin/cos для программирования движения

Содержание
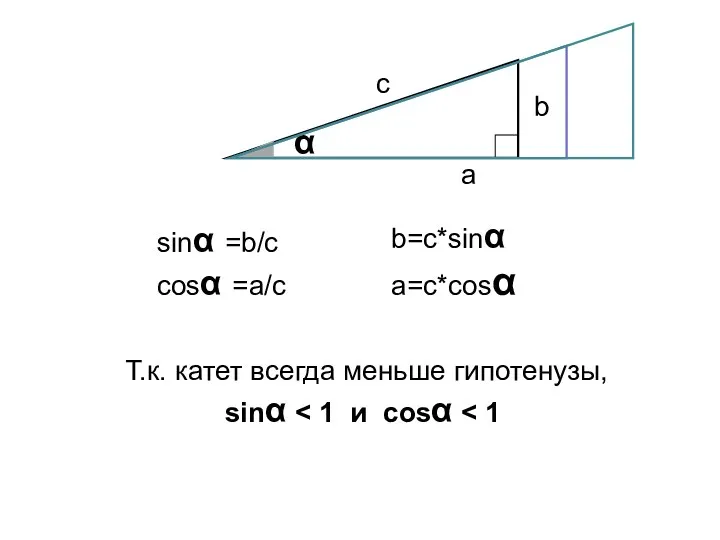
- 2. α a c b sinα =b/c cosα =a/c Т.к. катет всегда меньше гипотенузы, sinα b=c*sinα a=c*cosα
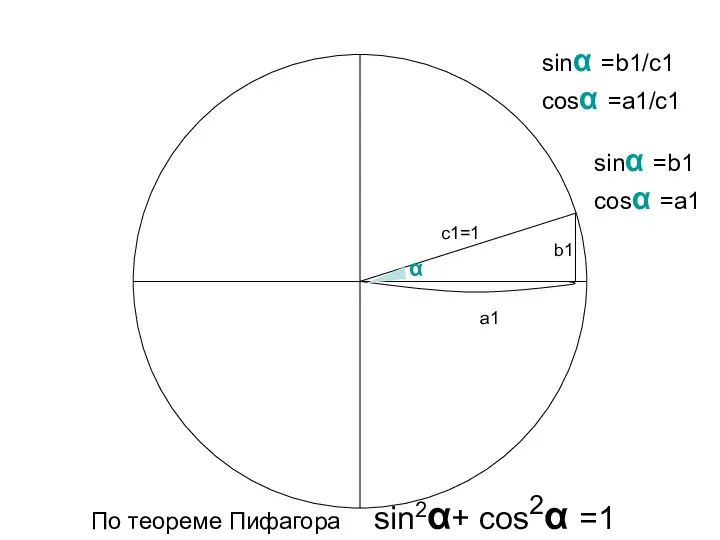
- 3. a1 c1=1 b1 sinα =b1/c1 cosα =a1/c1 α По теореме Пифагора sin2α+ cos2α =1 sinα =b1
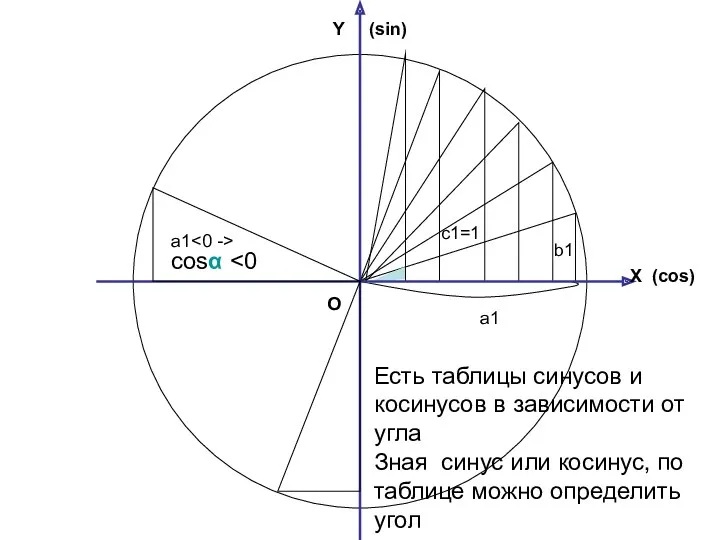
- 4. a1 c1=1 b1 Есть таблицы синусов и косинусов в зависимости от угла Зная синус или косинус,
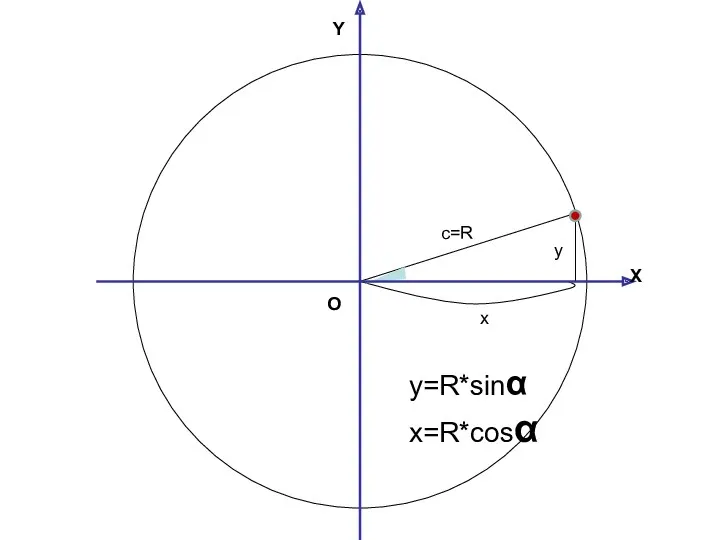
- 5. x c=R y X O Y y=R*sinα x=R*cosα
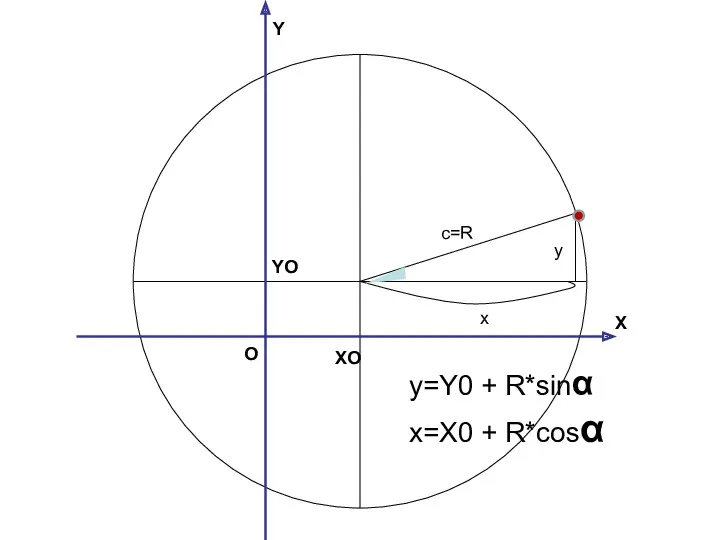
- 6. x c=R y X O Y y=Y0 + R*sinα x=X0 + R*cosα XO YO
- 7. В библиотеке Паскаля есть функции вычисления синуса и косинуса по значению угла в радианах y=Y0 +
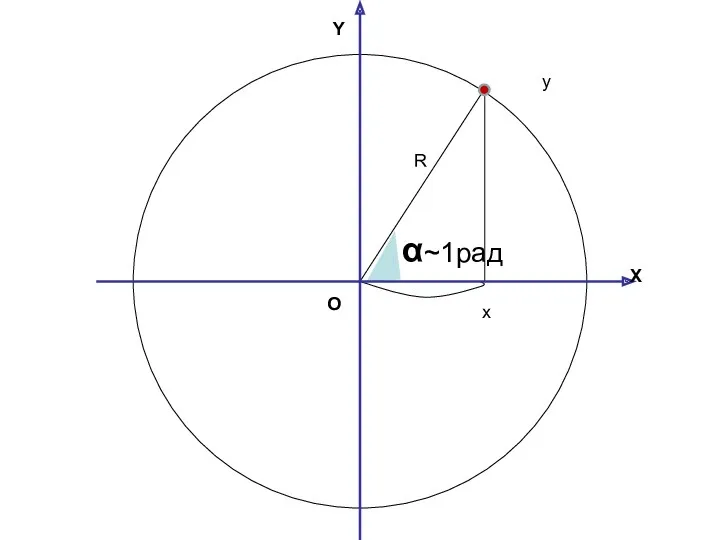
- 8. x R y X O Y α~1рад
- 10. Скачать презентацию
α
a
c
b
sinα =b/c
cosα =a/c
Т.к. катет всегда меньше гипотенузы, sinα < 1
α
a
c
b
sinα =b/c
cosα =a/c
Т.к. катет всегда меньше гипотенузы, sinα < 1
a1
c1=1
b1
sinα =b1/c1
cosα =a1/c1
α
По теореме Пифагора sin2α+ cos2α =1
sinα =b1
cosα =a1
a1
c1=1
b1
sinα =b1/c1
cosα =a1/c1
α
По теореме Пифагора sin2α+ cos2α =1
sinα =b1
cosα =a1
a1
c1=1
b1
Есть таблицы синусов и косинусов в зависимости от угла
Зная синус или
a1
c1=1
b1
Есть таблицы синусов и косинусов в зависимости от угла
Зная синус или
x
c=R
y
X
O
Y
y=R*sinα
x=R*cosα
x
c=R
y
X
O
Y
y=R*sinα
x=R*cosα
x
c=R
y
X
O
Y
y=Y0 + R*sinα
x=X0 + R*cosα
XO
YO
x
c=R
y
X
O
Y
y=Y0 + R*sinα
x=X0 + R*cosα
XO
YO
В библиотеке Паскаля есть функции вычисления синуса и косинуса по значению
В библиотеке Паскаля есть функции вычисления синуса и косинуса по значению
x
R
y
X
O
Y
α~1рад
x
R
y
X
O
Y
α~1рад
 Программное обеспечение персонального компьютера
Программное обеспечение персонального компьютера AS2 (Appicability Statement 2)
AS2 (Appicability Statement 2) Презентация Представление числовой информации в памяти компьютера
Презентация Представление числовой информации в памяти компьютера Системное программное обеспечение. (Лекция 8)
Системное программное обеспечение. (Лекция 8) Единица измерения. Содержательный и алфавитный подход к измерению информации
Единица измерения. Содержательный и алфавитный подход к измерению информации Использование информационно-коммуникационных технологий на уроках русского языка и литературы
Использование информационно-коммуникационных технологий на уроках русского языка и литературы Кибербезопасность простыми словами
Кибербезопасность простыми словами Eglamour SlidesCarnival
Eglamour SlidesCarnival Автоматизированная система управления космодромом
Автоматизированная система управления космодромом ZOOM в картинках. Часть 1 (регистрация и настройка)
ZOOM в картинках. Часть 1 (регистрация и настройка) Задачи
Задачи Оформление распорядительного документа Решение
Оформление распорядительного документа Решение Қазақ мерзімді баспасөзінің пайда болуы және қазақ тіліндегі алғашқы газеттер
Қазақ мерзімді баспасөзінің пайда болуы және қазақ тіліндегі алғашқы газеттер Поиск и сортировка информации в базах данных. ЕГЭ
Поиск и сортировка информации в базах данных. ЕГЭ Программа Skype
Программа Skype Модели и методы решения задач
Модели и методы решения задач Техническое задание на доработку сайта лендингового типа www.svoi-financy.ru
Техническое задание на доработку сайта лендингового типа www.svoi-financy.ru Общие сведения о компьютере
Общие сведения о компьютере Системы счисления. Создание веб-сайта
Системы счисления. Создание веб-сайта Разработка информационной системы обработки заявок на обслуживание для телекоммуникационной компании (на примере ООО Трайтек)
Разработка информационной системы обработки заявок на обслуживание для телекоммуникационной компании (на примере ООО Трайтек) История вычислительной техники
История вычислительной техники What is Samhain?
What is Samhain? ЭВМ пятого поколения
ЭВМ пятого поколения Электронная коммерция и реклама в сети Internet
Электронная коммерция и реклама в сети Internet Науковедение, наукометрия, библиометрия
Науковедение, наукометрия, библиометрия История создания интернета
История создания интернета International mobility of students and academic staff
International mobility of students and academic staff Тема 1.3. Обеспечение безопасности компьютерных систем и сетей. Безопасность компьютерных систем
Тема 1.3. Обеспечение безопасности компьютерных систем и сетей. Безопасность компьютерных систем