- уроки настоящего автомобилестроения

Содержание
- 2. import cv2 as cv import numpy as np img = cv.imread('2.JPG') #,cv.IMREAD_GRAYSCALE) frame = cv.resize(img, (800,600),
- 3. if contours: contours = sorted(contours, key=cv.contourArea, reverse=True) contour = contours[0] (x,y,w,h) = cv.boundingRect(contour) epsilon = 0.01*cv.arcLength(contour,True)
- 4. Состоит из двух частей: 1. Аппаратная часть — устройство сбора и обработки информации; 2. Программная часть
- 6. Скачать презентацию
import cv2 as cv
import numpy as np
img = cv.imread('2.JPG') #,cv.IMREAD_GRAYSCALE)
frame =
import cv2 as cv
import numpy as np
img = cv.imread('2.JPG') #,cv.IMREAD_GRAYSCALE)
frame =
![if contours: contours = sorted(contours, key=cv.contourArea, reverse=True) contour = contours[0]](/_ipx/f_webp&q_80&fit_contain&s_1440x1080/imagesDir/jpg/165456/slide-2.jpg)
if contours:
contours = sorted(contours, key=cv.contourArea, reverse=True)
contour = contours[0]
(x,y,w,h)
if contours:
contours = sorted(contours, key=cv.contourArea, reverse=True)
contour = contours[0]
(x,y,w,h)
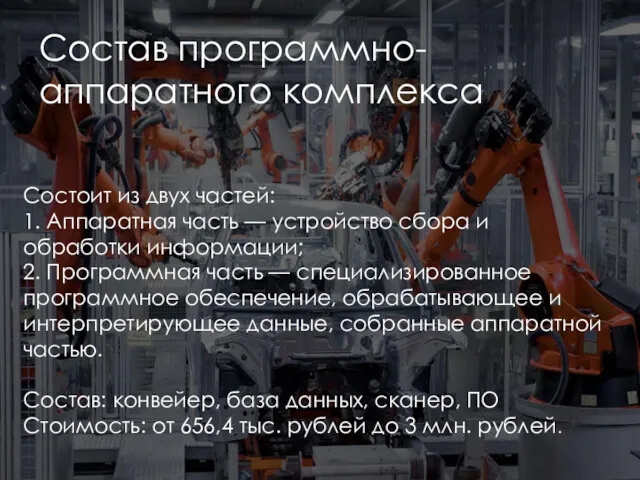
Состоит из двух частей:
1. Аппаратная часть — устройство сбора и обработки
Состоит из двух частей: 1. Аппаратная часть — устройство сбора и обработки
 Лекция 2. Основные конструкции OpenMP
Лекция 2. Основные конструкции OpenMP Сетевые сервисы
Сетевые сервисы Решение задач ЕГЭ типа В9
Решение задач ЕГЭ типа В9 Компоненты образовательных ИТ-технологий
Компоненты образовательных ИТ-технологий Параллельное программирование для ресурсоёмких задач численного моделирования в физике. Лекция 2
Параллельное программирование для ресурсоёмких задач численного моделирования в физике. Лекция 2 Repository and Unit of Work
Repository and Unit of Work Лекция №7. Системы автоматизированного проектирования (САПР)
Лекция №7. Системы автоматизированного проектирования (САПР) Базы данных. Процедуры и функции
Базы данных. Процедуры и функции Примеры разработки программ-функций в системе MATHCAD. Лекция 7
Примеры разработки программ-функций в системе MATHCAD. Лекция 7 Создание простой диаграммы в Excel 2010
Создание простой диаграммы в Excel 2010 Установка дистрибутивов
Установка дистрибутивов Threads. Выполнение инструкций потоками
Threads. Выполнение инструкций потоками Информационные процессы и системы
Информационные процессы и системы Сортировка методом пузырька
Сортировка методом пузырька Рекрутинг в инстаграм
Рекрутинг в инстаграм Цветовые модели компьютерной графики
Цветовые модели компьютерной графики Людино-комп'ютерна взаємодія та проектування інтерфейсів користувача
Людино-комп'ютерна взаємодія та проектування інтерфейсів користувача Технологии локальных сетей. (Тема 3)
Технологии локальных сетей. (Тема 3) Разработка информационной системы для ТОО Fin-apps
Разработка информационной системы для ТОО Fin-apps Технологии и средства обработки текста
Технологии и средства обработки текста Программирование многоядерных архитектур
Программирование многоядерных архитектур Системы автоматизированного проектирования технологических процессов. Программное обеспечение САПР ТП. (Лекция 3)
Системы автоматизированного проектирования технологических процессов. Программное обеспечение САПР ТП. (Лекция 3) Почему классический CTF должен умереть
Почему классический CTF должен умереть Белгілі бір бағдарламаны жугізушілер қандай болуы керек
Белгілі бір бағдарламаны жугізушілер қандай болуы керек Об оформлении газет
Об оформлении газет Этические проблемы сетевой журналистики
Этические проблемы сетевой журналистики Циклы в языкеПаскаль
Циклы в языкеПаскаль Школа подготовки технических администраторов. (Занятие 16)
Школа подготовки технических администраторов. (Занятие 16)