- Geometric Transformations

Содержание
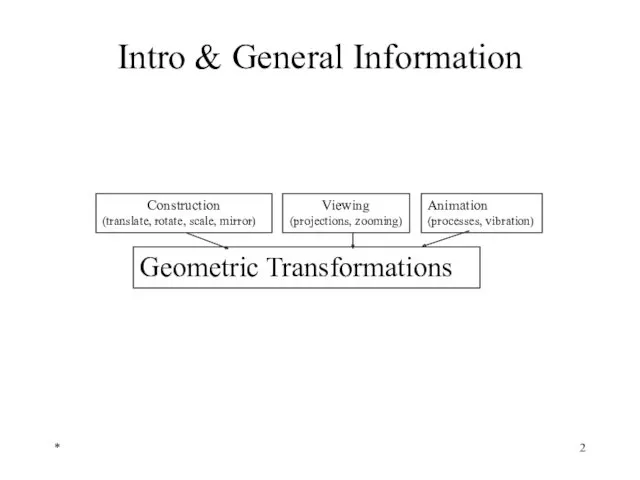
- 2. * Intro & General Information Geometric Transformations Construction (translate, rotate, scale, mirror) Viewing (projections, zooming) Animation
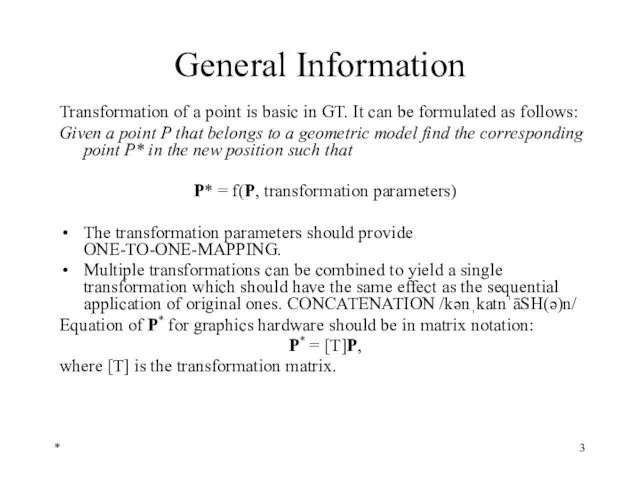
- 3. * General Information Transformation of a point is basic in GT. It can be formulated as
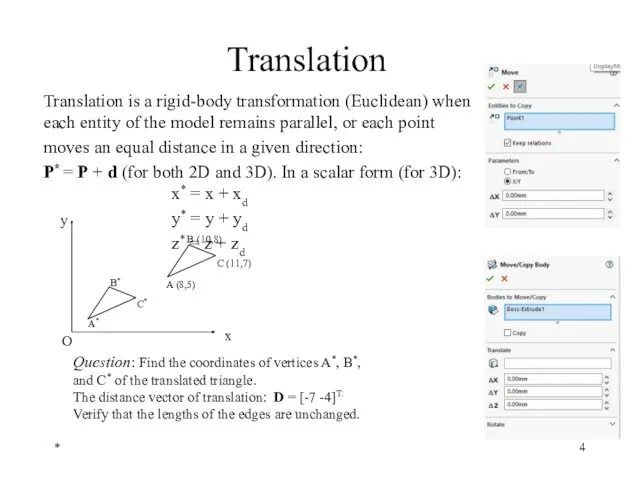
- 4. * Translation Translation is a rigid-body transformation (Euclidean) when each entity of the model remains parallel,
- 5. Scaling is used to change the size of an entity or a model. P* = [S]P
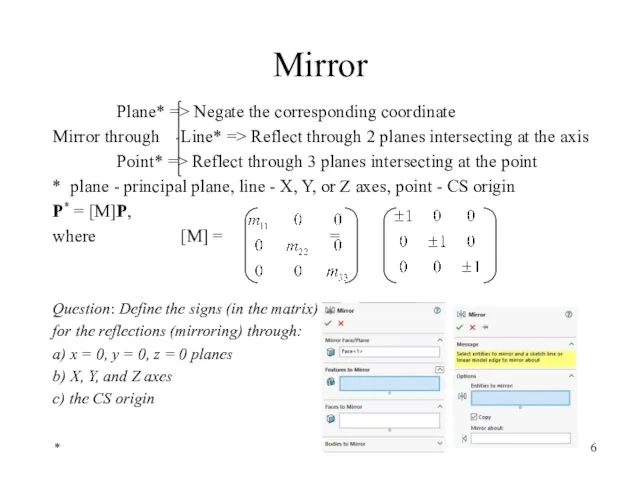
- 6. * Mirror Plane* => Negate the corresponding coordinate Mirror through Line* => Reflect through 2 planes
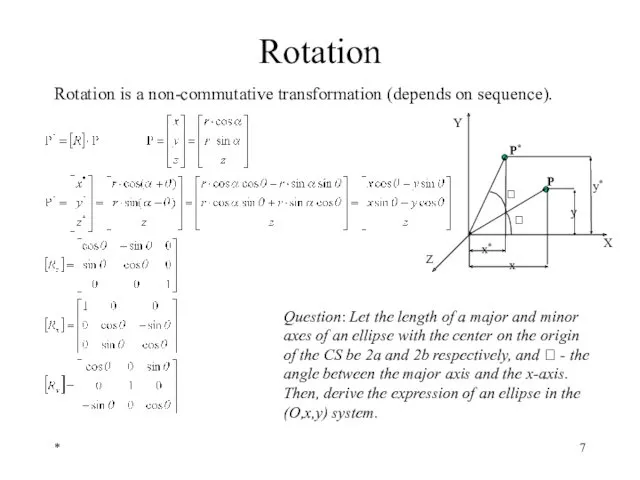
- 7. * Rotation Rotation is a non-commutative transformation (depends on sequence). Question: Let the length of a
- 8. * Homogeneous Transformation - 1 When we scale then rotate, the transformed image is given by:
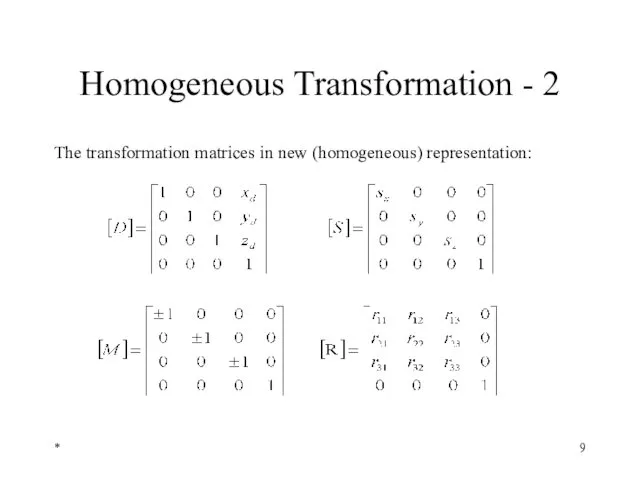
- 9. * Homogeneous Transformation - 2 The transformation matrices in new (homogeneous) representation:
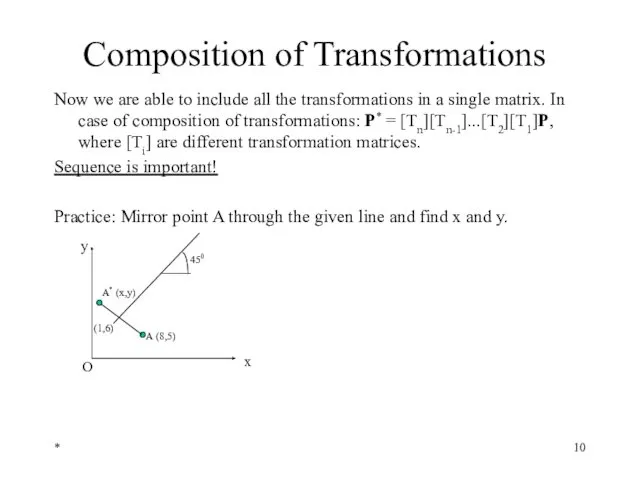
- 10. * Composition of Transformations Now we are able to include all the transformations in a single
- 12. Скачать презентацию
*
Intro & General Information
Geometric Transformations
Construction
(translate, rotate, scale, mirror)
Viewing
(projections,
*
Intro & General Information
Geometric Transformations
Construction
(translate, rotate, scale, mirror)
Viewing
(projections,
*
General Information
Transformation of a point is basic in GT. It
*
General Information
Transformation of a point is basic in GT. It
*
Translation
Translation is a rigid-body transformation (Euclidean) when each entity of the
*
Translation
Translation is a rigid-body transformation (Euclidean) when each entity of the
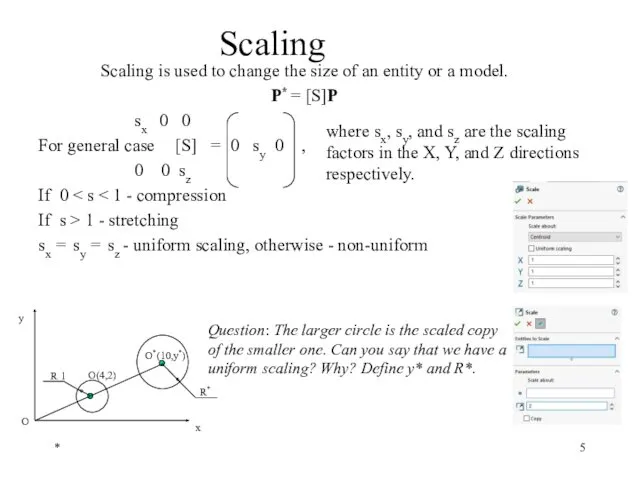
Scaling is used to change the size of an entity or
Scaling is used to change the size of an entity or
*
Mirror
Plane* => Negate the corresponding coordinate
Mirror through Line* => Reflect through
*
Mirror
Plane* => Negate the corresponding coordinate
Mirror through Line* => Reflect through
*
Rotation
Rotation is a non-commutative transformation (depends on sequence).
Question: Let the length
*
Rotation
Rotation is a non-commutative transformation (depends on sequence).
Question: Let the length
*
Homogeneous Transformation - 1
When we scale then rotate, the transformed image
*
Homogeneous Transformation - 1
When we scale then rotate, the transformed image
*
Homogeneous Transformation - 2
The transformation matrices in new (homogeneous) representation:
*
Homogeneous Transformation - 2
The transformation matrices in new (homogeneous) representation:
*
Composition of Transformations
Now we are able to include all the transformations
*
Composition of Transformations
Now we are able to include all the transformations
 Округление десятичных дробей. Урок математики в 5 классе
Округление десятичных дробей. Урок математики в 5 классе Кот в сапогах. Тренажёр по математике для 1 класса
Кот в сапогах. Тренажёр по математике для 1 класса Линейное уравнение с двумя переменными и его график
Линейное уравнение с двумя переменными и его график Неравенство треугольника
Неравенство треугольника Графический способ решения систем уравнений
Графический способ решения систем уравнений Компьютерная дискретная математика. Отображение и функции
Компьютерная дискретная математика. Отображение и функции Сводная таблица умножения
Сводная таблица умножения Решение систем уравнений методом подстановки
Решение систем уравнений методом подстановки Построение сечений. 10 класс
Построение сечений. 10 класс Математика. 1 класс. Урок 46. Числа 1-8 - Презентация
Математика. 1 класс. Урок 46. Числа 1-8 - Презентация Решение одной задачи несколькими способами
Решение одной задачи несколькими способами Теорема Пифагора и её практическое применение
Теорема Пифагора и её практическое применение Додаємо і віднімаємо числа з переходом через десяток у межах 20 (тема 2)
Додаємо і віднімаємо числа з переходом через десяток у межах 20 (тема 2) Решение уравнений графическим способом
Решение уравнений графическим способом Системы линейных алгебраических уравнений
Системы линейных алгебраических уравнений Физический смысл целевой функции транспортной задачи по критерию стоимости
Физический смысл целевой функции транспортной задачи по критерию стоимости Вычисление двойных интегралов с помощью замены переменных
Вычисление двойных интегралов с помощью замены переменных Площади параллелограмма, треугольника и трапеции. Урок 20
Площади параллелограмма, треугольника и трапеции. Урок 20 Случайные величины
Случайные величины Сложение и вычитание десятичных дробей. Решение задач
Сложение и вычитание десятичных дробей. Решение задач Подобные треугольники
Подобные треугольники Возникновение геометрических терминов
Возникновение геометрических терминов Временные ряды в эконометрических исследованиях
Временные ряды в эконометрических исследованиях Приёмы устных вычислений в пределах 1000
Приёмы устных вычислений в пределах 1000 Линейная функция в физике
Линейная функция в физике Докажите, что на каждой из картинок синие части равны в сумме по площади красным
Докажите, что на каждой из картинок синие части равны в сумме по площади красным Нахождение дроби от числа
Нахождение дроби от числа Деление натуральных чисел. Свойства деления. 5 класс
Деление натуральных чисел. Свойства деления. 5 класс