- Математические модели управления

Содержание
- 2. Теория управления наука о принципах и методах управления различными системами, процессами и объектами. Суть теории управления
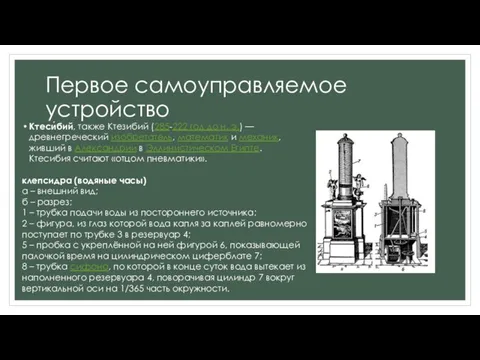
- 3. Первое самоуправляемое устройство Ктеси́бий, также Ктезибий (285-222 год до н. э.) — древнегреческий изобретатель, математик и
- 4. Корнелиус Дреббель Корнелиус Якобсон Дреббель (нидерл. Cornelius Jacobszoon Drebbel; 1572, Алкмар — 7 ноября 1633, Лондон)
- 5. Уатт, Джеймс Джеймс Уатт (англ. James Watt; 19 (30) января 1736 — 19 августа 1819) —
- 6. Ляпунов, Александр Михайлович Алекса́ндр Миха́йлович Ляпуно́в (25 мая (6 июня) 1857, Ярославль — 3 ноября 1918,
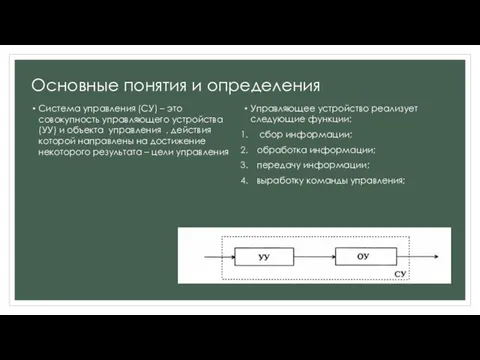
- 7. Основные понятия и определения Управляющее устройство реализует следующие функции: сбор информации; обработка информации; передачу информации; выработку
- 8. функциональная схема системы управления
- 9. Примеры схемы систем управления: углом тангажа самолета производством тара товара процессом обучения в
- 10. Классификация задач расчета систем управления Задачи анализа: по заданному воздействию и оператору системы исследовать закон изменения
- 11. Описание сигналов
- 12. Описание системы
- 13. Усилительное звено
- 14. Дифференцирующее звено Интегрирующее звено
- 15. Пример 1
- 16. Пример 2
- 17. Передаточная функция
- 18. Дифференциальные уравнения соединений А. Последовательное соединение Б. Параллельное соединение В. Соединение с обратной связью
- 19. Пример 3 Заданы входной и выходной сигналы: а) найти передаточную функцию W(p) всей системы; б) представить
- 20. Решение: а) Передаточная функция всей системы: б) Передаточная функция в виде Произведения элементарных динамических звеньев:
- 21. Пример 1. Упростив схему, представленную на рис. 2.8, определить какому элементарному динамическому звену соответствует передаточная функция
- 22. Решение:
- 24. Передаточную функцию двух звеньев, соединенных встречно-параллельно с отрицательной обратной связью можно представить в виде следующего выражения:
- 26. Скачать презентацию
Теория управления
наука о принципах и методах управления различными системами, процессами и
Теория управления
наука о принципах и методах управления различными системами, процессами и
Первое самоуправляемое устройство
Ктеси́бий, также Ктезибий (285-222 год до н. э.) —
Первое самоуправляемое устройство
Ктеси́бий, также Ктезибий (285-222 год до н. э.) —
Корнелиус Дреббель
Корнелиус Якобсон Дреббель (нидерл. Cornelius Jacobszoon Drebbel; 1572, Алкмар — 7
Корнелиус Дреббель
Корнелиус Якобсон Дреббель (нидерл. Cornelius Jacobszoon Drebbel; 1572, Алкмар — 7
Уатт, Джеймс
Джеймс Уатт (англ. James Watt; 19 (30) января 1736 —
19 августа 1819) — шотландский инженер,
Уатт, Джеймс
Джеймс Уатт (англ. James Watt; 19 (30) января 1736 —
19 августа 1819) — шотландский инженер,
Ляпунов, Александр Михайлович
Алекса́ндр Миха́йлович Ляпуно́в (25 мая (6 июня) 1857, Ярославль — 3 ноября
Ляпунов, Александр Михайлович
Алекса́ндр Миха́йлович Ляпуно́в (25 мая (6 июня) 1857, Ярославль — 3 ноября
Основные понятия и определения
Управляющее устройство реализует следующие функции:
сбор информации;
обработка информации;
передачу
Основные понятия и определения
Управляющее устройство реализует следующие функции:
сбор информации;
обработка информации;
передачу
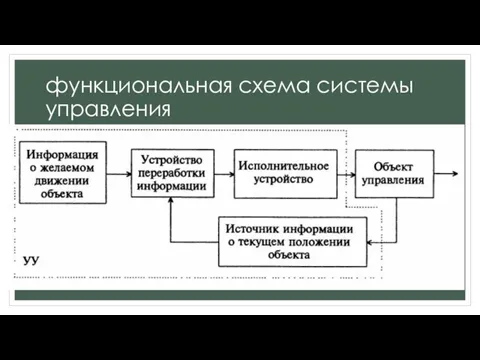
функциональная схема системы управления
функциональная схема системы управления
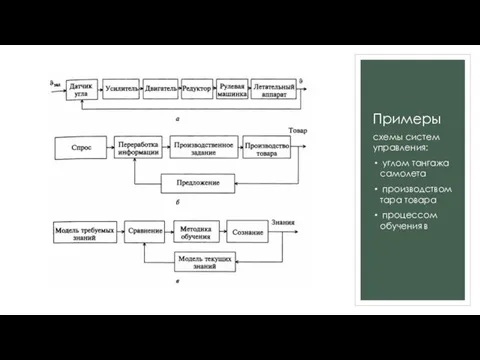
Примеры
схемы систем управления:
углом тангажа самолета
производством тара товара
процессом обучения
Примеры
схемы систем управления:
углом тангажа самолета
производством тара товара
процессом обучения
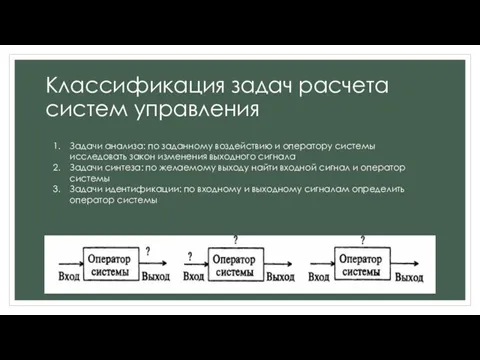
Классификация задач расчета систем управления
Задачи анализа: по заданному воздействию и оператору
Классификация задач расчета систем управления
Задачи анализа: по заданному воздействию и оператору
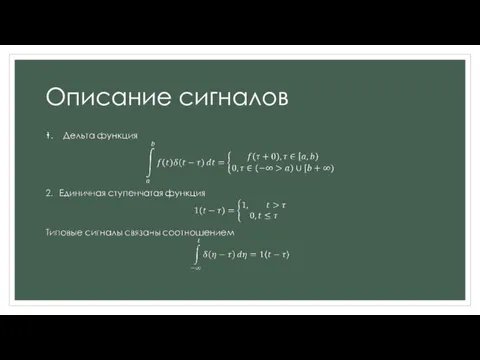
Описание сигналов
Описание сигналов
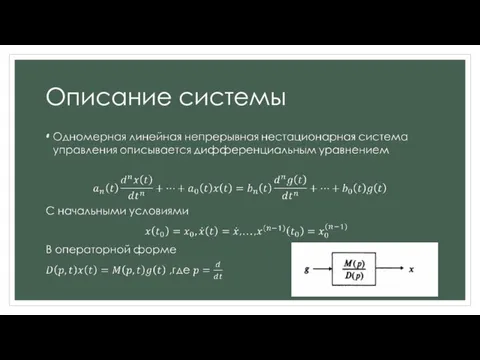
Описание системы
Описание системы

Усилительное звено
Усилительное звено

Дифференцирующее звено
Интегрирующее звено
Дифференцирующее звено
Интегрирующее звено
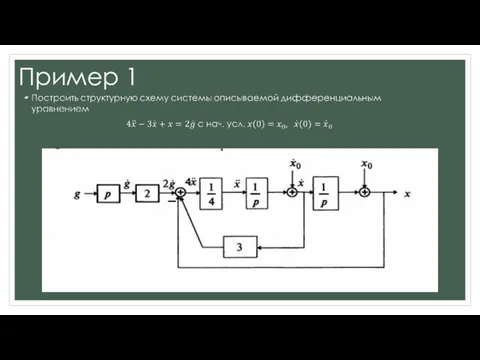
Пример 1
Пример 1
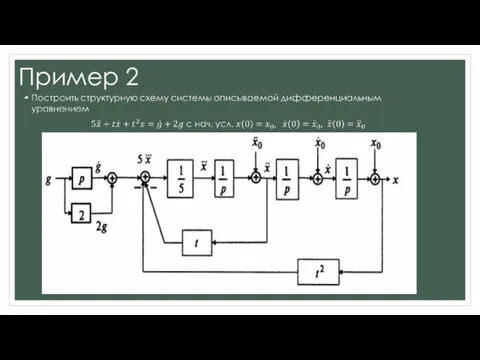
Пример 2
Пример 2
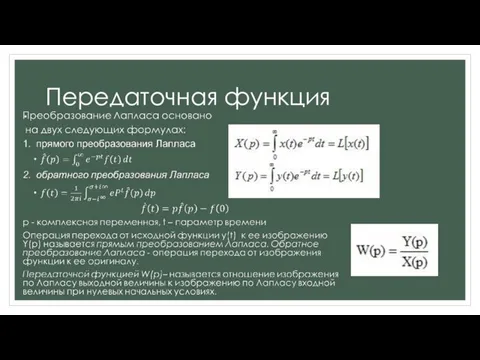
Передаточная функция
Передаточная функция

Дифференциальные уравнения соединений
А. Последовательное соединение
Б. Параллельное соединение
В. Соединение с обратной связью
Дифференциальные уравнения соединений
А. Последовательное соединение
Б. Параллельное соединение
В. Соединение с обратной связью
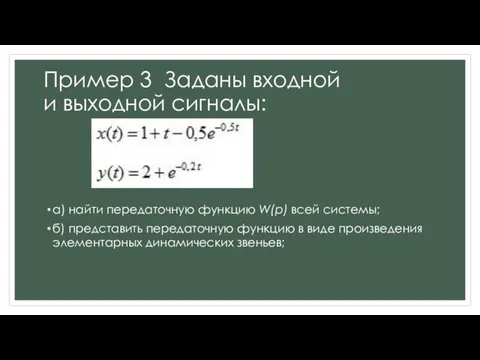
Пример 3 Заданы входной и выходной сигналы:
а) найти передаточную функцию W(p)
Пример 3 Заданы входной и выходной сигналы:
а) найти передаточную функцию W(p)

Решение:
а) Передаточная функция всей системы: б) Передаточная функция в виде
Произведения
Решение:
а) Передаточная функция всей системы: б) Передаточная функция в виде
Произведения
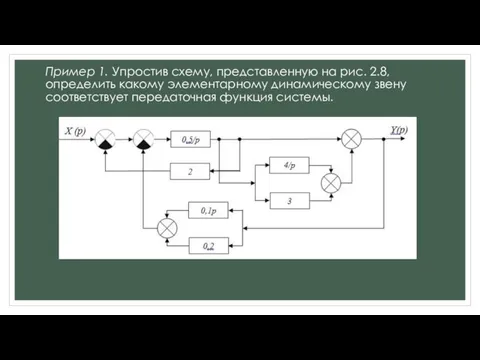
Пример 1. Упростив схему, представленную на рис. 2.8, определить какому элементарному
Пример 1. Упростив схему, представленную на рис. 2.8, определить какому элементарному
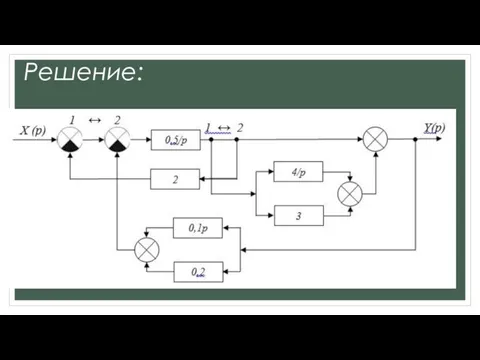
Решение:
Решение:
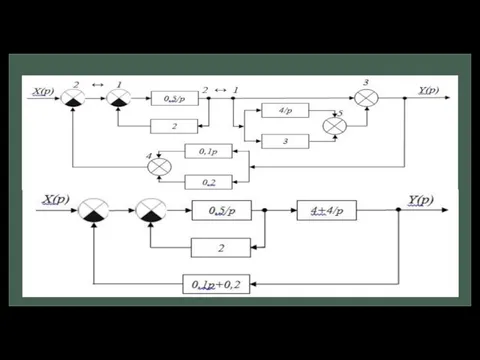

Передаточную функцию двух звеньев, соединенных встречно-параллельно с отрицательной обратной связью можно
Передаточную функцию двух звеньев, соединенных встречно-параллельно с отрицательной обратной связью можно
 Стохастические модели приземных трасс
Стохастические модели приземных трасс Конспект урока (с презентацией) математики в 4 классе по теме Арифметические действия над числами
Конспект урока (с презентацией) математики в 4 классе по теме Арифметические действия над числами Презентация Праздник первого десятка
Презентация Праздник первого десятка Урок математики во 2 ом классе по программе Н. Ф.Виноградовой УМК Школа 21 века, проведённый учителем Котенёвой Надеждой Николаевной. МБОУ Средняя школа № 26 г. Балаково Саратовской области
Урок математики во 2 ом классе по программе Н. Ф.Виноградовой УМК Школа 21 века, проведённый учителем Котенёвой Надеждой Николаевной. МБОУ Средняя школа № 26 г. Балаково Саратовской области Площади и объемы геометрических фигур
Площади и объемы геометрических фигур Координатная плоскость. Изучение нового материала с метапредметной составляющей. 6 класс
Координатная плоскость. Изучение нового материала с метапредметной составляющей. 6 класс Опредление Производной
Опредление Производной Четные и нечетные функции
Четные и нечетные функции Наибольшее и наименьшее значения функции
Наибольшее и наименьшее значения функции Решение квадратных уравнений. Алгебра 8 класс
Решение квадратных уравнений. Алгебра 8 класс Буквенная запись свойств сложения и вычитания
Буквенная запись свойств сложения и вычитания Проблема мультиколлинеарности и методы его устранения. Тема 10
Проблема мультиколлинеарности и методы его устранения. Тема 10 Теория множеств
Теория множеств Методика навчання елементів геометрії в курсі математики 1 – 4 класів
Методика навчання елементів геометрії в курсі математики 1 – 4 класів Периметр многоугольника. 2 класс
Периметр многоугольника. 2 класс Применение технологии разноуровневых уроков при подготовке к ЕГЭ по математике
Применение технологии разноуровневых уроков при подготовке к ЕГЭ по математике Тренажёр. Примеры в пределах 20. (1 класс)
Тренажёр. Примеры в пределах 20. (1 класс) Смежные и вертикальные углы
Смежные и вертикальные углы Устный счет по математике
Устный счет по математике Презентация Поиск закономерности в записи ряда чисел
Презентация Поиск закономерности в записи ряда чисел Движение. 9 класс
Движение. 9 класс Где живут белые медведи
Где живут белые медведи Равенство фигур. Тело и его поверхность
Равенство фигур. Тело и его поверхность Презентация : Использование логических блоков Дьенеша в процессе развития математических представлений дошкольников
Презентация : Использование логических блоков Дьенеша в процессе развития математических представлений дошкольников Solving linear recurrence relations
Solving linear recurrence relations Конспект урока и презентация математика 4 класс Скорость сближения и скорость удаления
Конспект урока и презентация математика 4 класс Скорость сближения и скорость удаления Пропорции
Пропорции Probability Random Variables Preparatory Notes
Probability Random Variables Preparatory Notes