- Методы преобразования плоскостей проекций (Лекция 5)

Содержание
- 2. Общие положения В данной группе методов исходный базис (П1 иП2) жестко зафиксирован в пространстве. Объект перемещается
- 3. Общие положения Независимо от метода преобразования, в задаче выделяется главный элемент, с которым и выполняются преобразования.
- 4. Общие положения Типовые задачи: Главный элемент – прямая Прямую общего положения преобразовать в линию уровня L→
- 5. Общие положения Главный элемент – плоскость 3) Плоскость общего положения преобразовать в проецирующую α→ α‘ ┴
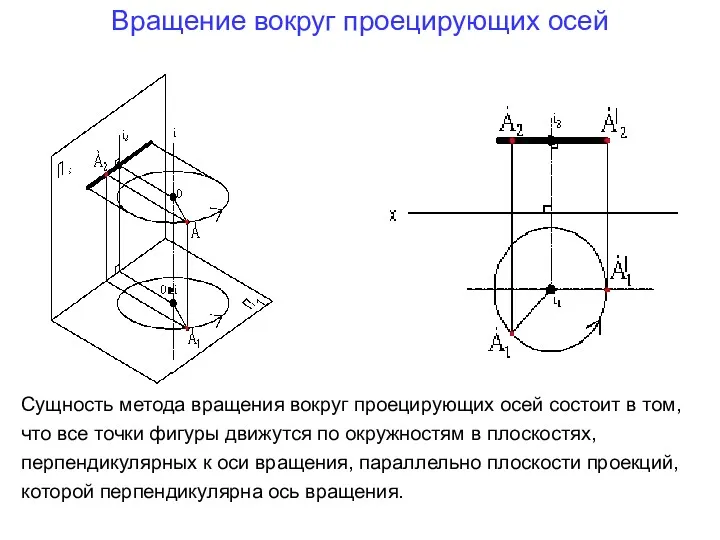
- 6. Вращение вокруг проецирующих осей Сущность метода вращения вокруг проецирующих осей состоит в том, что все точки
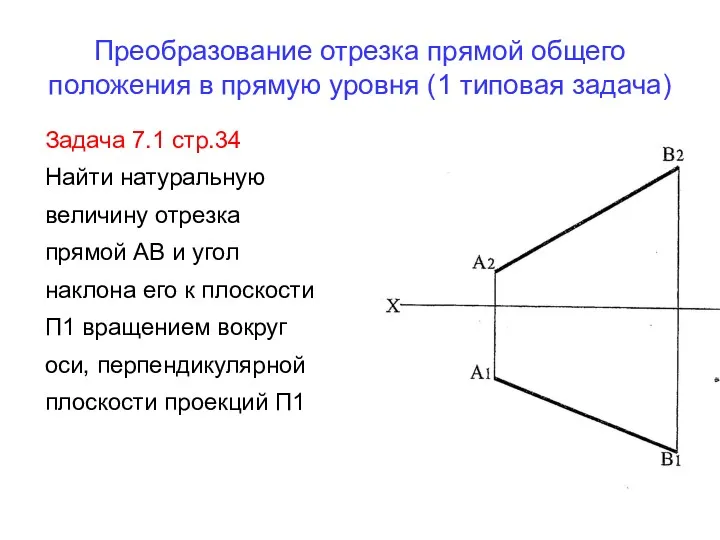
- 7. Преобразование отрезка прямой общего положения в прямую уровня (1 типовая задача) Задача 7.1 стр.34 Найти натуральную
- 8. Решение: Отрезок проецируется на плоскость проекций в натуральную величину, если он параллелен этой плоскости. Следовательно, надо
- 9. На плоскости П2 проекция точки В перемещается на своей высоте в новое положение В2‘ В2‘ А2
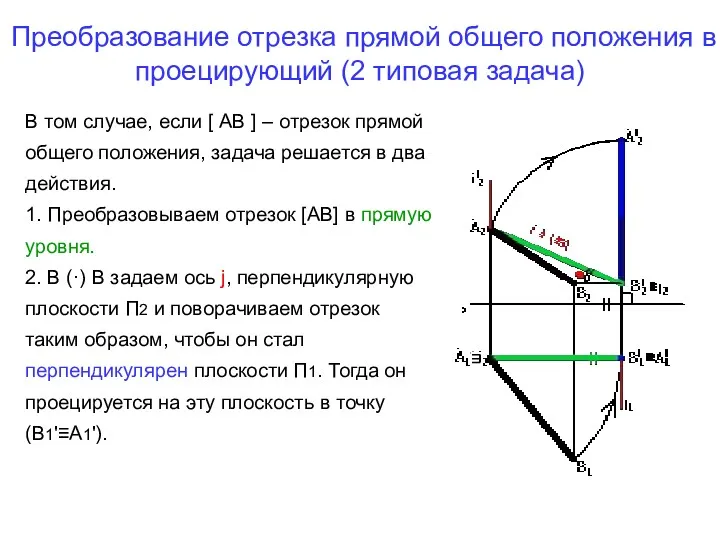
- 10. Преобразование отрезка прямой общего положения в проецирующий (2 типовая задача) В том случае, если [ АВ
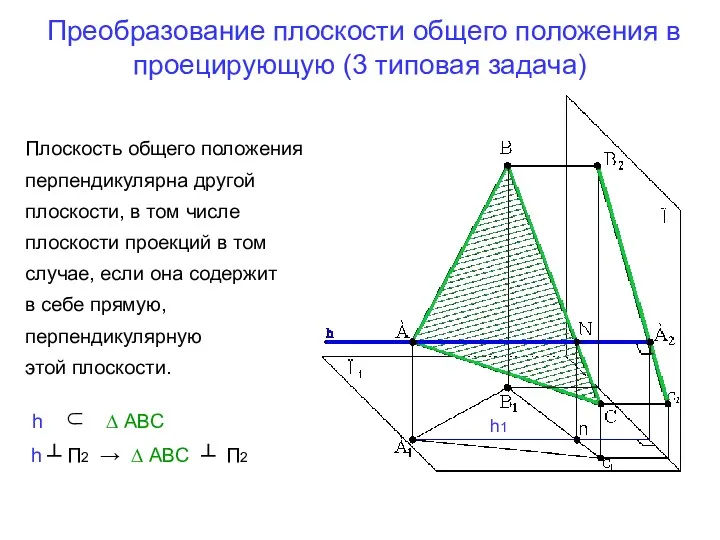
- 11. Преобразование плоскости общего положения в проецирующую (3 типовая задача) Плоскость общего положения перпендикулярна другой плоскости, в
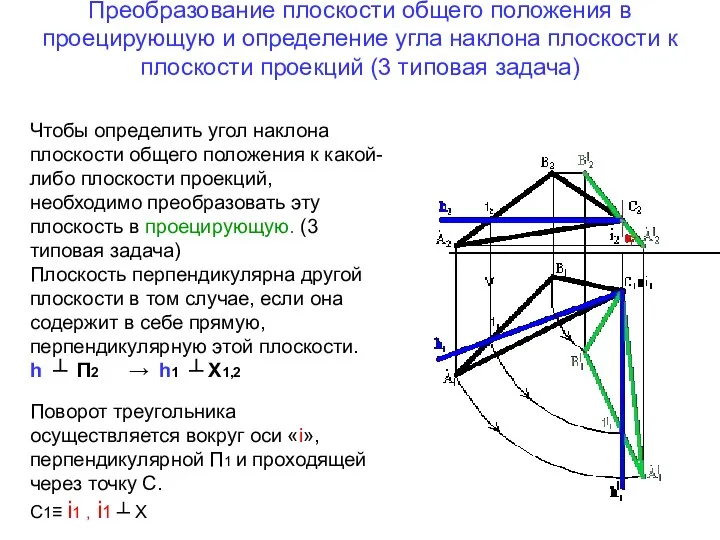
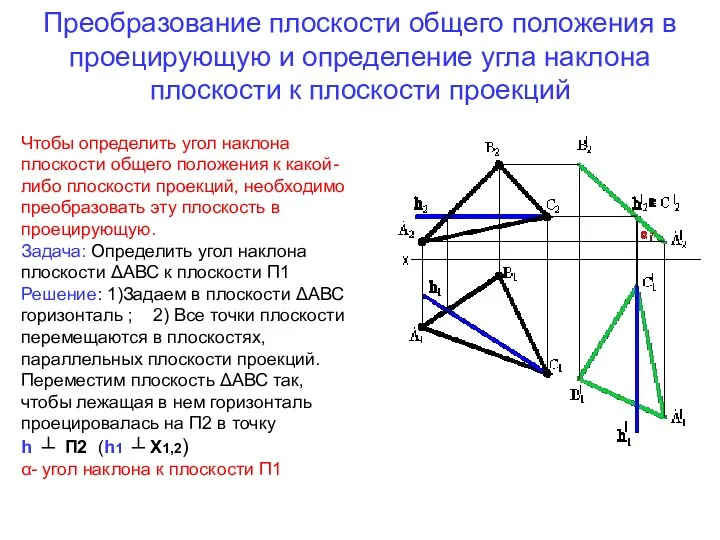
- 12. Преобразование плоскости общего положения в проецирующую и определение угла наклона плоскости к плоскости проекций (3 типовая
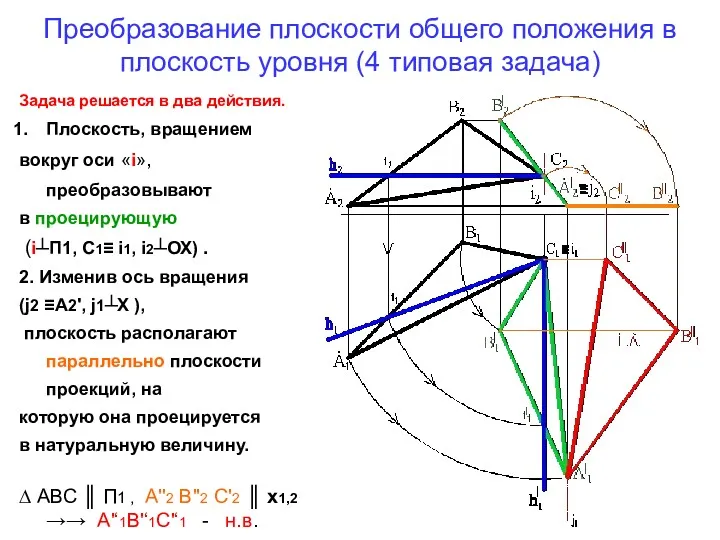
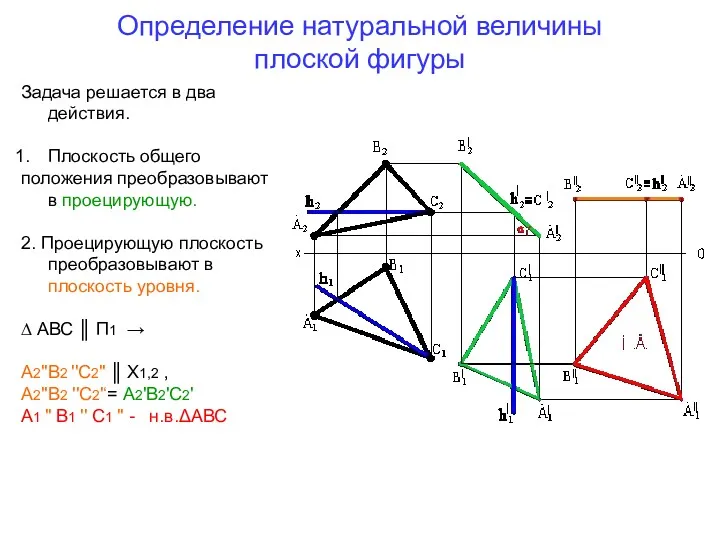
- 13. Преобразование плоскости общего положения в плоскость уровня (4 типовая задача) Задача решается в два действия. Плоскость,
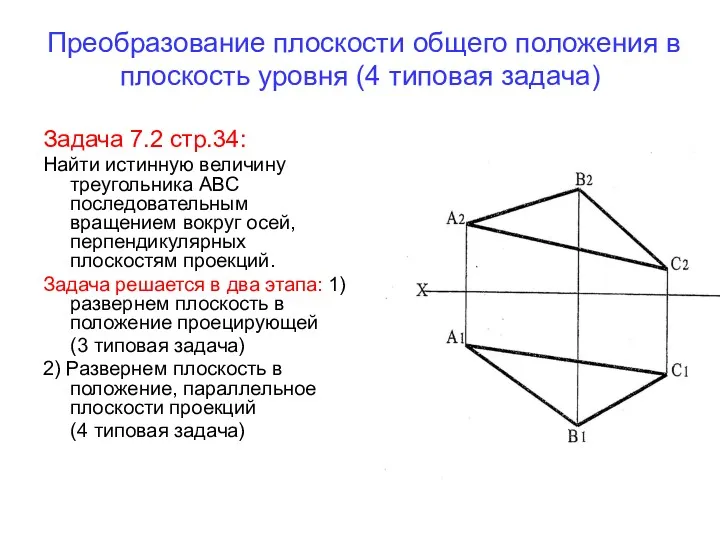
- 14. Преобразование плоскости общего положения в плоскость уровня (4 типовая задача) Задача 7.2 стр.34: Найти истинную величину
- 15. Решение: Гл.элемент преобразования – плоскость. 1) Преобразуем плоскость общего положения в проецирующую: Зададим в плоскости ΔАВС
- 16. Все точки фигуры движутся одновременно и останавливаются, когда горизонталь разворачивается в положение, перпендикулярное плоскости П2. (намечаем
- 17. Соединяем проекции точек 11‘ и С1' , продолжаем далее до пересечения с траекторией движения точки В
- 18. Все точки фигуры, вращаясь вокруг оси i┴П1, движутся параллельно плоскости П1 На чертеже на плоскости П2
- 19. 2)Преобразуем проецирующую плоскость в плоскость уровня Зададим вторую ось вращения m┴П2 (m2≡В2‘, m1 ┴ оси Х)
- 20. Т.к. на П2 проекции точек А2'‘ и С2'‘ вращаются по окружности, на П1 проекции точек А1'‘
- 21. Соединив полученные проекции А1''С1 '' В1 '‘ получим натуральную величину ΔАВС
- 22. Вращение вокруг линий уровня Этот способ применяется для преобразования плоскости общего положения в плоскость уровня и
- 23. Рассмотрим примеры Задача 7.3 стр.35 : Определить натуральную величину угла между прямыми АВ и ВС методом
- 24. Решение: Зададим в плоскости АВС фронталь на любом расстоянии от П2 На чертеже на П1 f1‖
- 25. Т.к. фронталь является осью вращения, точки 1 и 2, лежащие на оси, останутся неподвижными. Вершина В
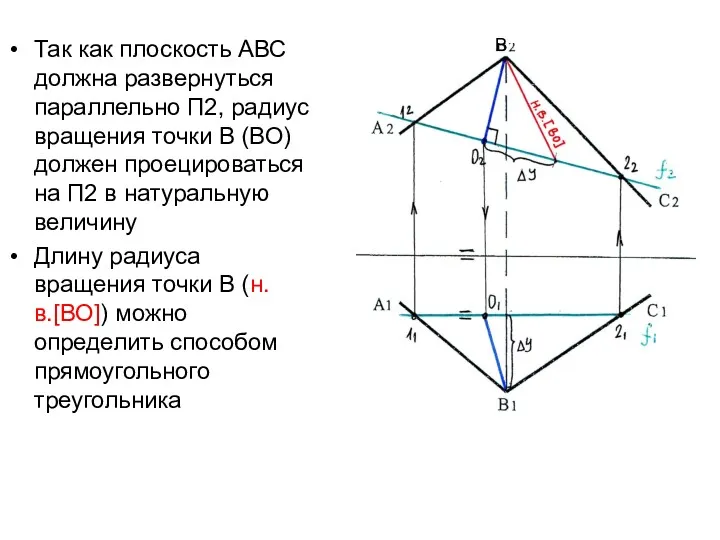
- 26. Так как плоскость АВС должна развернуться параллельно П2, радиус вращения точки В (ВО) должен проецироваться на
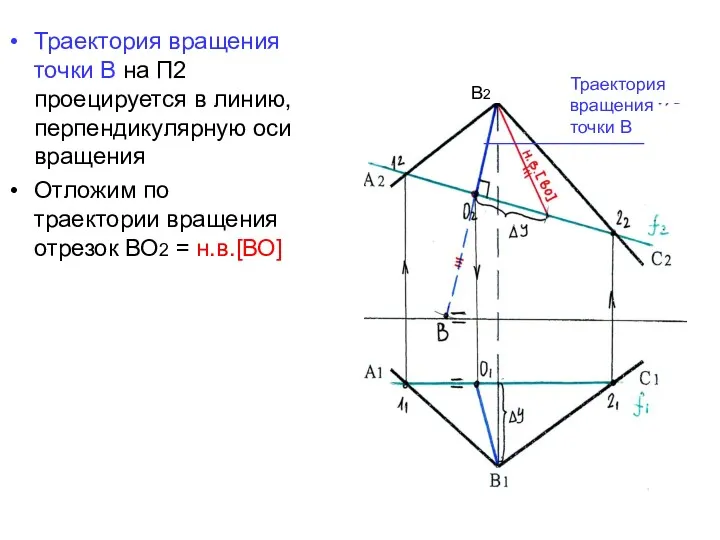
- 27. Траектория вращения точки В на П2 проецируется в линию, перпендикулярную оси вращения Отложим по траектории вращения
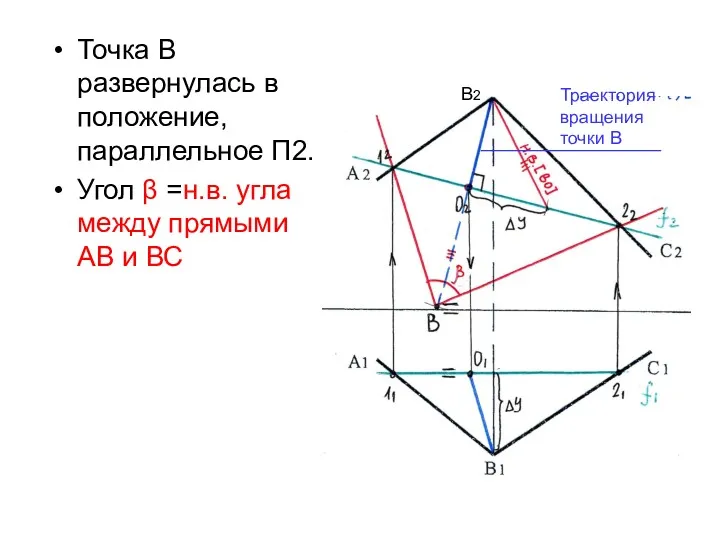
- 28. Точка В развернулась в положение, параллельное П2. Угол β =н.в. угла между прямыми АВ и ВС
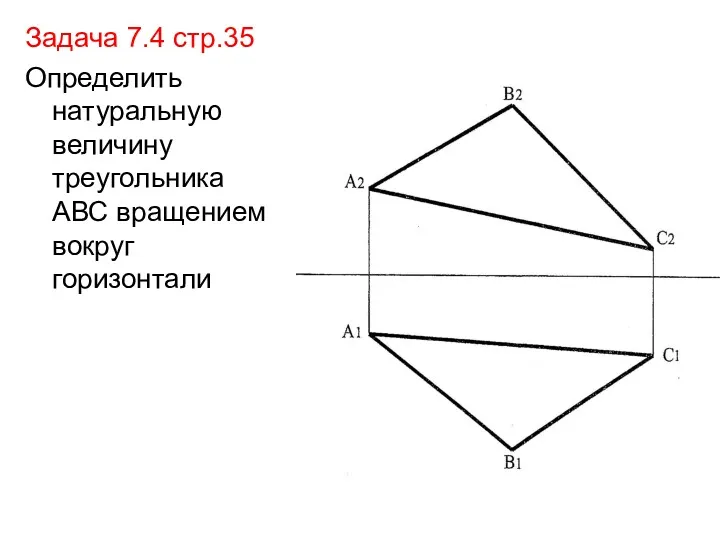
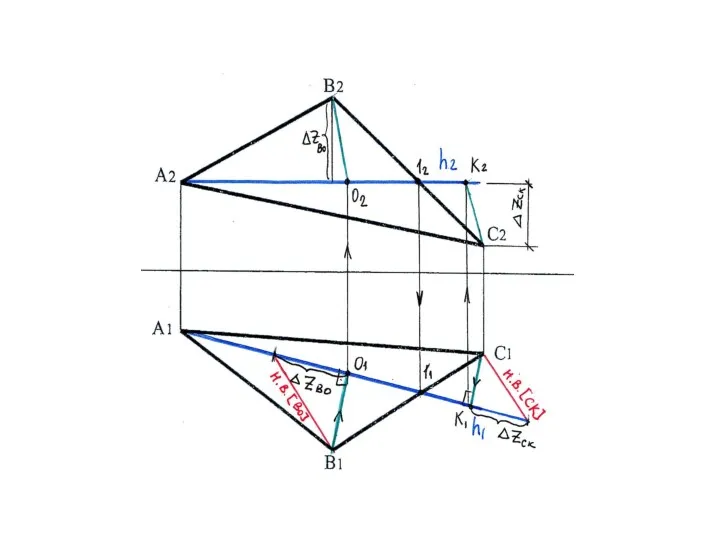
- 29. Задача 7.4 стр.35 Определить натуральную величину треугольника АВС вращением вокруг горизонтали
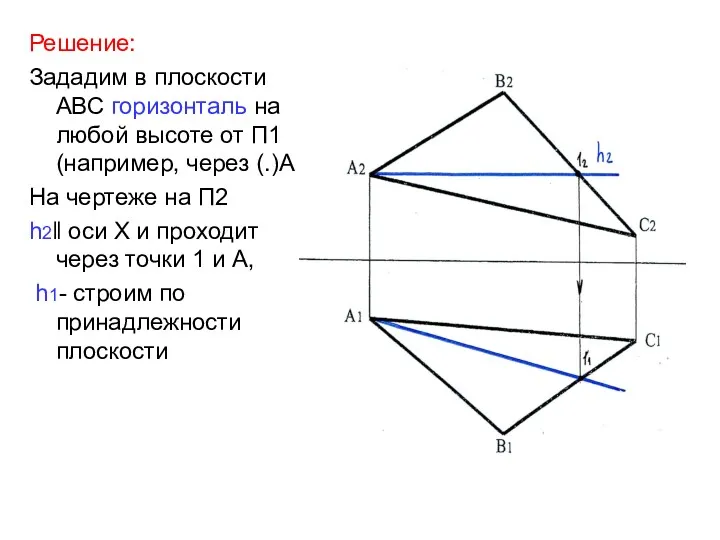
- 30. Решение: Зададим в плоскости АВС горизонталь на любой высоте от П1 (например, через (.)А На чертеже
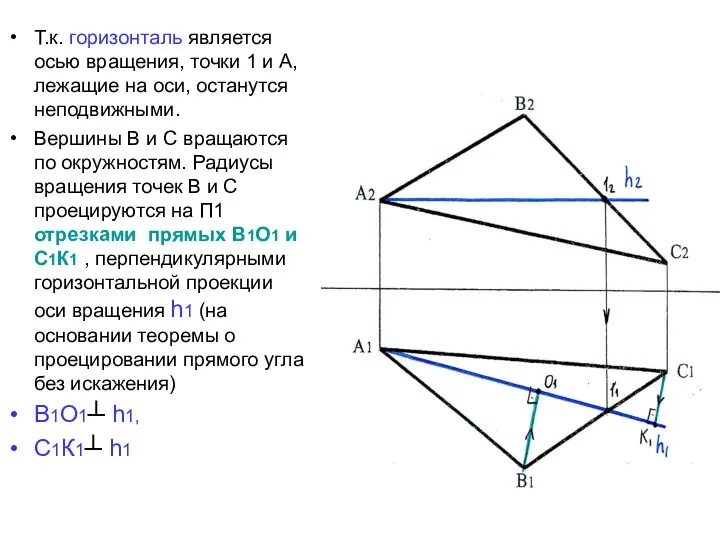
- 31. Т.к. горизонталь является осью вращения, точки 1 и А, лежащие на оси, останутся неподвижными. Вершины В
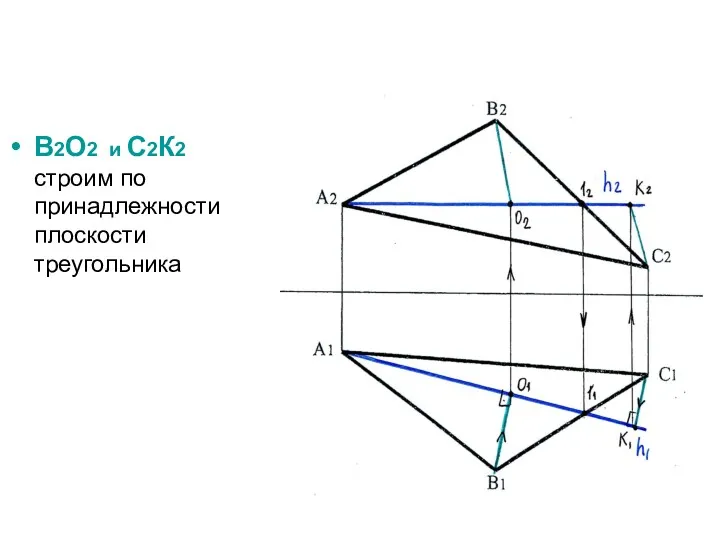
- 32. В2О2 и С2К2 строим по принадлежности плоскости треугольника
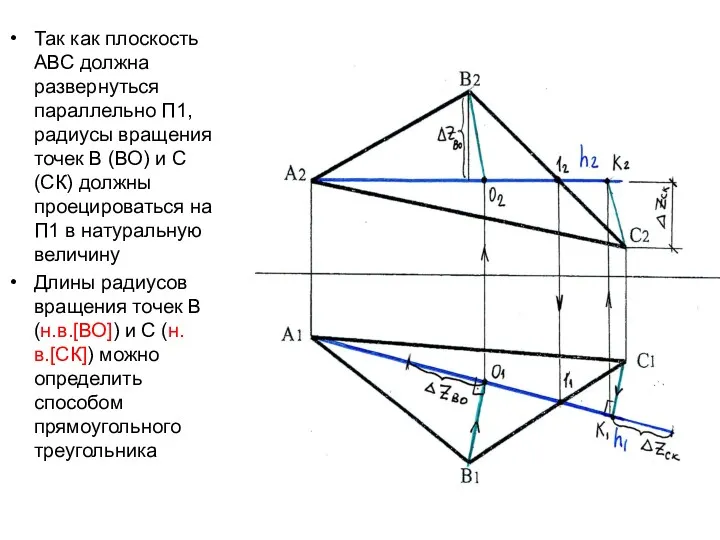
- 33. Так как плоскость АВС должна развернуться параллельно П1, радиусы вращения точек В (ВО) и С (СК)
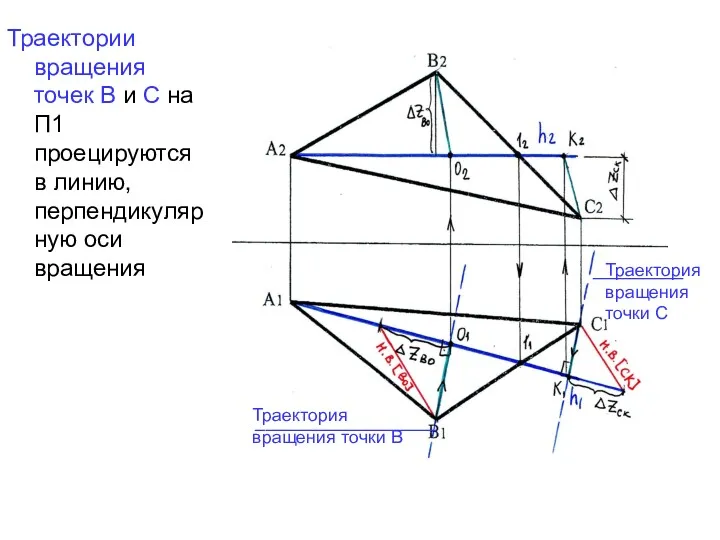
- 35. Траектория вращения точки В Траектория вращения точки С _________ __________________ Траектории вращения точек В и С
- 36. Отложим по траектории вращения точки В отрезок ВО1 = н.в.[ВО] и по траектории вращения точки С
- 37. Метод плоскопараллельного перемещения Сущность метода плоско- параллельного перемещения состоит в том, что все точки фигуры движутся
- 38. Преобразование отрезка прямой общего положения в прямую уровня (1 типовая задача) Располагаем отрезок параллельно плоскости проекций
- 39. Преобразование отрезка прямой общего положения в проецирующий Задача решается в два действия. Отрезок преобразовывают в прямую
- 40. Задача 7.7 стр.37: Найти расстояние от точки А до прямой ВС методом плоскопараллельного перемещения Решение: Расстояние
- 41. Если прямая ВС преобразуется в проецирующую, то расстояние от точки А до ВС будет проецироваться в
- 42. Вместе с главным элементом перемещается и (.)А, (находим новое положение проекции А1‘ с помощью расстояний от
- 43. Все точки объекта движутся параллельно П1, поэтому на П2 фронтальные проекции точек смещаются параллельно оси Х
- 44. По линиям связи находим новое положение фронтальных проекций точек В2',С2 ' и А2 '
- 45. Отрезок ВС проецируется в натуральную величину (промежуточный результат)
- 46. Преобразуем главный элемент- отрезок прямой ВС в положение проецирующего. На чертеже н.в. [ВС] = В2‘С2' располагаем
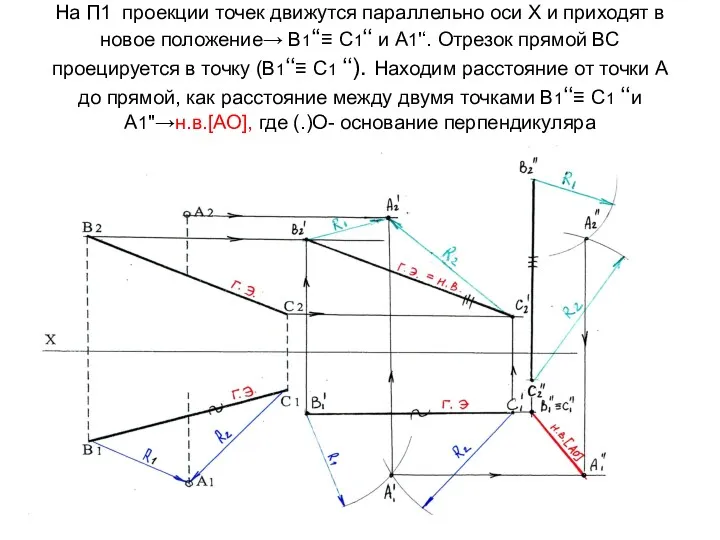
- 47. На П1 проекции точек движутся параллельно оси Х и приходят в новое положение→ В1‘‘≡ С1‘‘ и
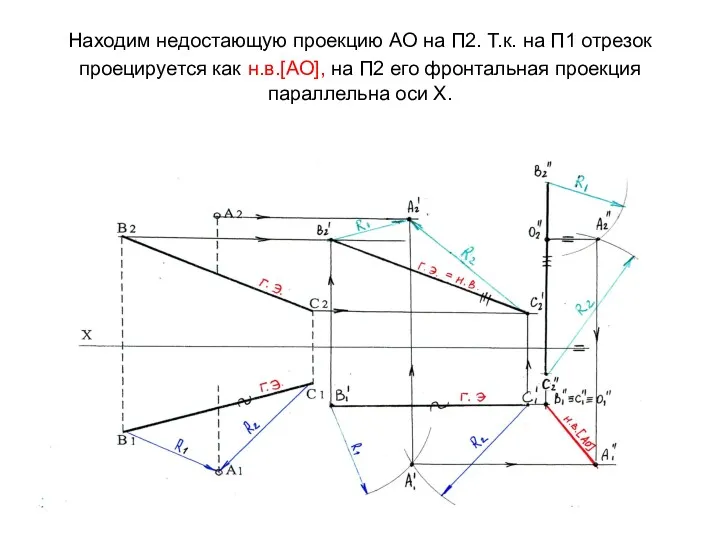
- 48. Находим недостающую проекцию АО на П2. Т.к. на П1 отрезок проецируется как н.в.[АО], на П2 его
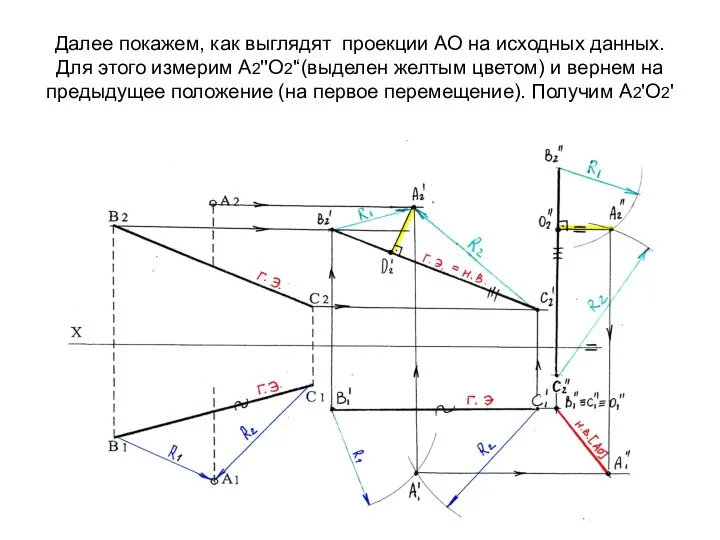
- 49. Далее покажем, как выглядят проекции АО на исходных данных. Для этого измерим А2''О2'‘(выделен желтым цветом) и
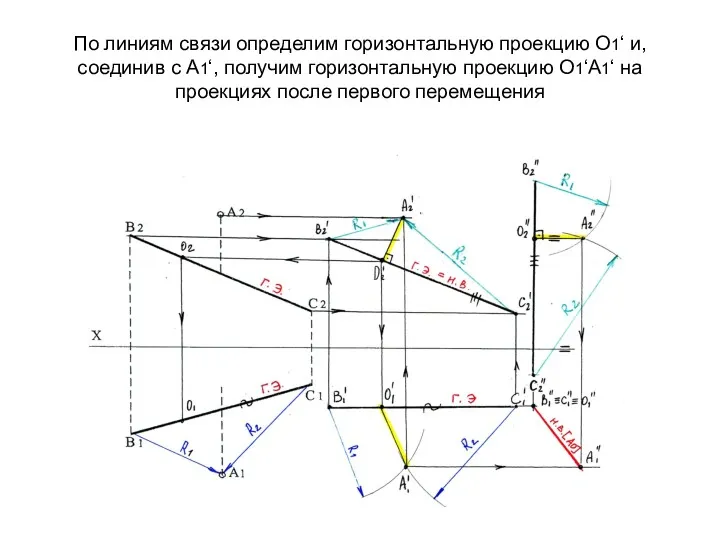
- 50. По линиям связи определим горизонтальную проекцию О1‘ и, соединив с А1‘, получим горизонтальную проекцию О1‘А1‘ на
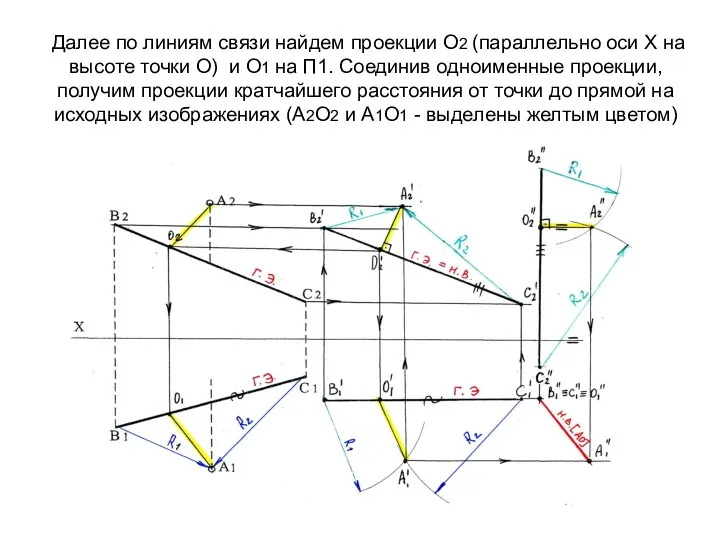
- 51. Далее по линиям связи найдем проекции О2 (параллельно оси Х на высоте точки О) и О1
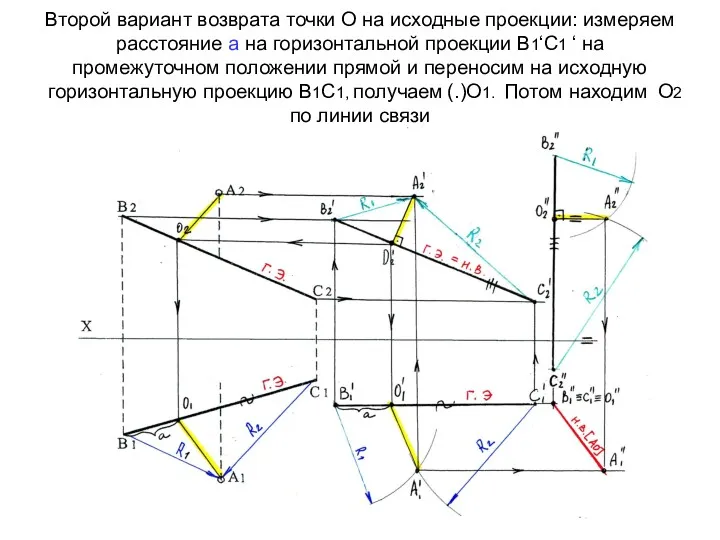
- 52. Второй вариант возврата точки О на исходные проекции: измеряем расстояние а на горизонтальной проекции В1‘С1 ‘
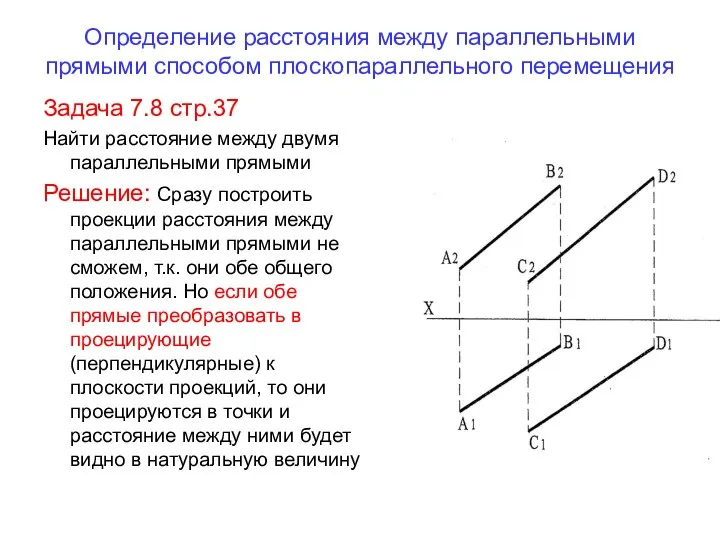
- 53. Определение расстояния между параллельными прямыми способом плоскопараллельного перемещения Задача 7.8 стр.37 Найти расстояние между двумя параллельными
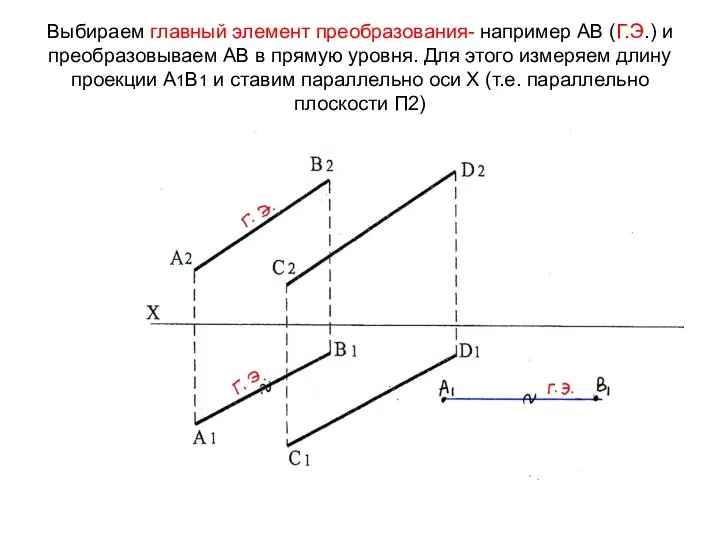
- 54. Выбираем главный элемент преобразования- например АВ (Г.Э.) и преобразовываем АВ в прямую уровня. Для этого измеряем
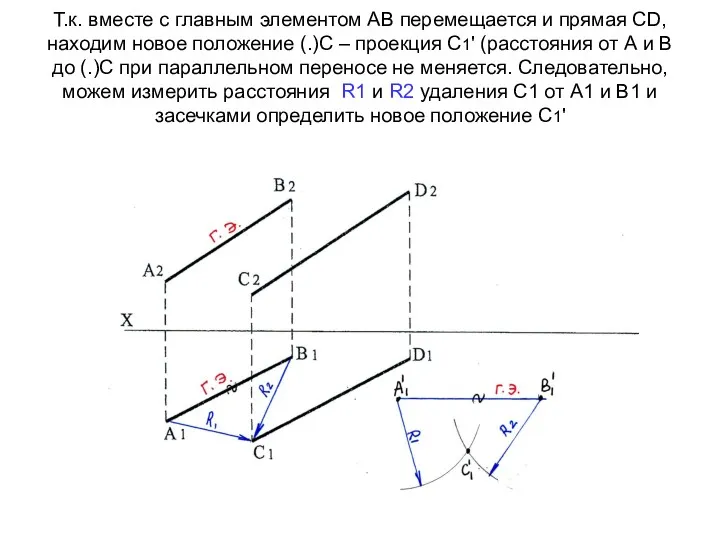
- 55. Т.к. вместе с главным элементом АВ перемещается и прямая СD, находим новое положение (.)С – проекция
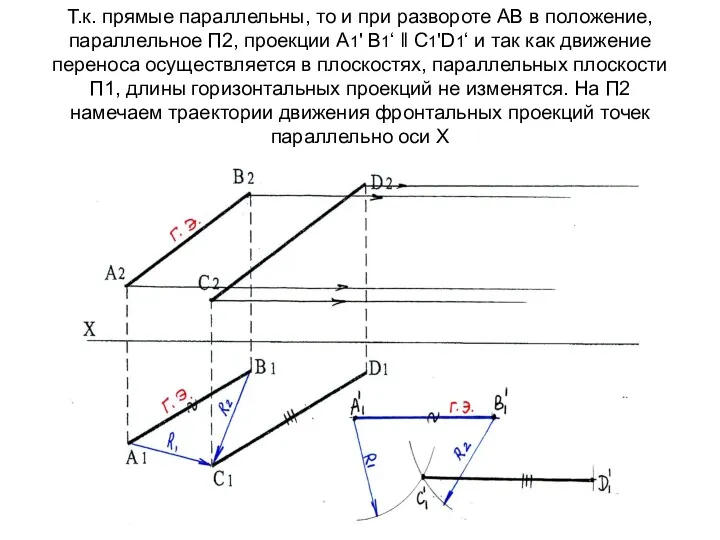
- 56. Т.к. прямые параллельны, то и при развороте АВ в положение, параллельное П2, проекции А1' В1‘ ‖
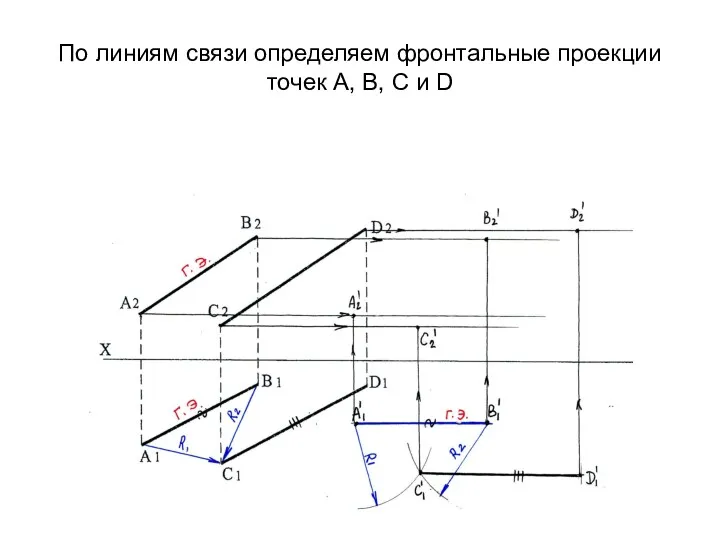
- 57. По линиям связи определяем фронтальные проекции точек А, В, С и D
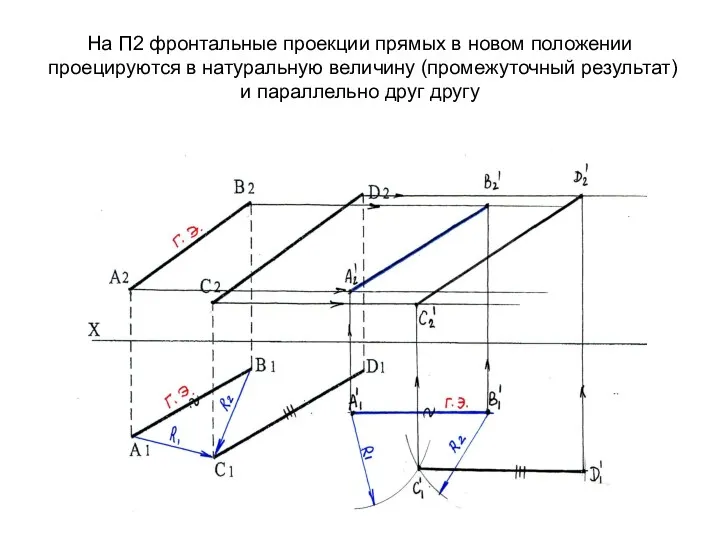
- 58. На П2 фронтальные проекции прямых в новом положении проецируются в натуральную величину (промежуточный результат) и параллельно
- 59. Выполняем второе перемещение –преобразуем отрезок АВ (Г.Э.) в проецирующий. На П2 А2‘В2‘ = А2‘'В2‘‘ и А2‘'В2‘‘
- 60. Т.к. вместе с АВ параллельно плоскости П2 перемещается и СD, расстояние между прямыми не изменится. Измеряем
- 61. Строим фронтальную проекцию С2'‘D2'‘ после второго перемещения (С2'D2' = С2'‘D2'‘). Находим горизонтальную проекцию С1'‘D1'‘ . Прямая
- 62. Натуральная величина расстояния между параллельными прямыми находится как расстояние между двумя точками, в которые проецируются прямые
- 63. Возвращаем проекции ВК на исходные позиции. Т.к. В2 ''К2'‘ ┴С2 '‘D2'‘, то и на предыдущей проекции
- 64. Возвращаем проекции ВК на исходные позиции. Можно определить положение проекции К2 по линии связи на одной
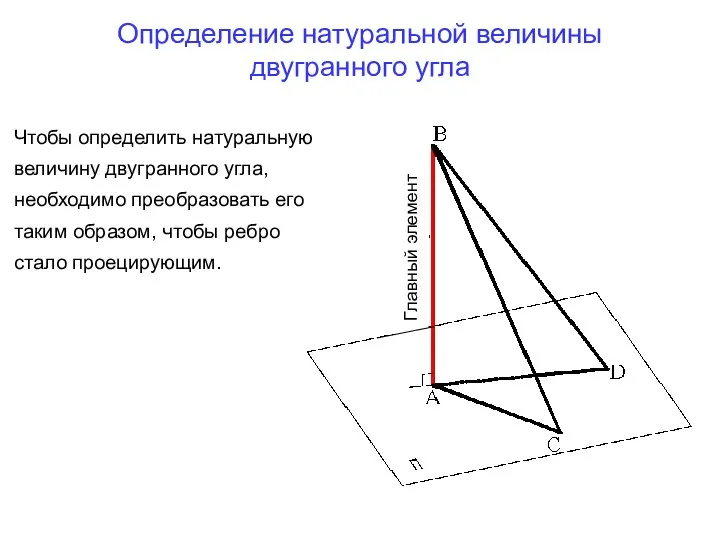
- 65. Определение натуральной величины двугранного угла Главный элемент Чтобы определить натуральную величину двугранного угла, необходимо преобразовать его
- 66. Задача 7.9 стр.38 Найти истинную величину двугранного угла методом плоскопараллельного перемещения Решение: У двух пересекающихся плоскостей
- 67. Таким образом, ВD – главный элемент (Г.Э.). 1) Преобразуем ВD в линию уровня (1 типовая задача).
- 68. Вместе с главным элементом одновременно перемещаются точки А и С. Измеряем расстояния от точек В2 и
- 69. Соединив полученные точки, получим фронтальную проекцию двугранного угла в новом положении. На П1 траектории движения точек
- 70. Соединяем полученные проекции точек на П1- получаем новую горизонтальную проекцию двугранного угла, причем общее ребро(Г.Э.) проецируется
- 71. 2)Преобразуем ребро ВD в положение проецирующей прямой. Для этого развернем его в плоскостях, параллельных П1 в
- 72. Т.к. движение переноса осуществляется параллельно П1, проекция на П1 двугранного угла не изменится, только Г.Э.= н.в.
- 73. Определяем новое положение точки А1'‘ засечками, измеряя расстояния удаления от точек В1‘ и D1‘ до А1
- 74. На П2 траектории движения точек параллельны оси Х. По линиям связи определяем фронтальные проекции точек А2'‘
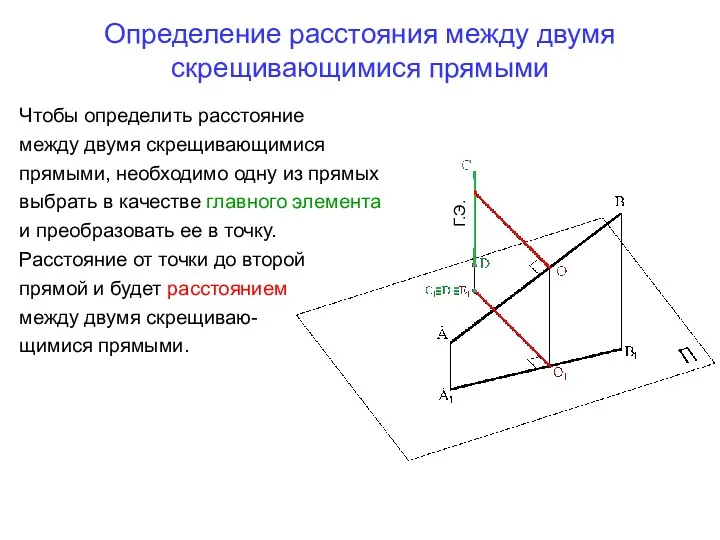
- 75. Определение расстояния между двумя скрещивающимися прямыми Г.Э. Чтобы определить расстояние между двумя скрещивающимися прямыми, необходимо одну
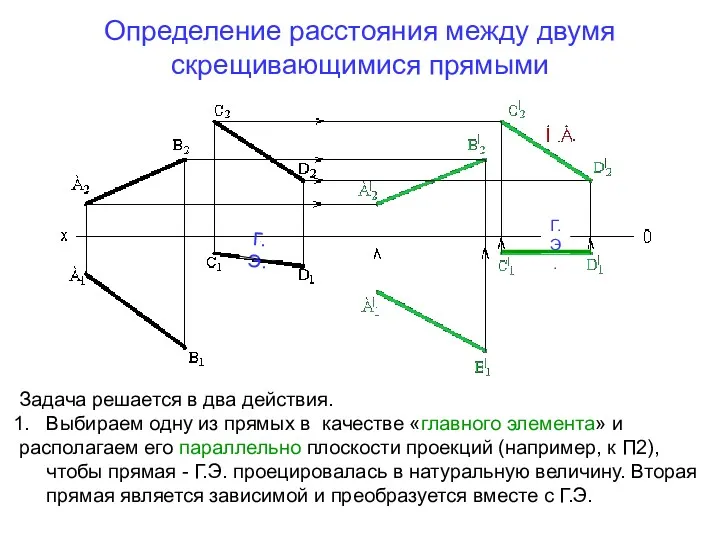
- 76. Определение расстояния между двумя скрещивающимися прямыми Г.Э. Г.Э. Задача решается в два действия. Выбираем одну из
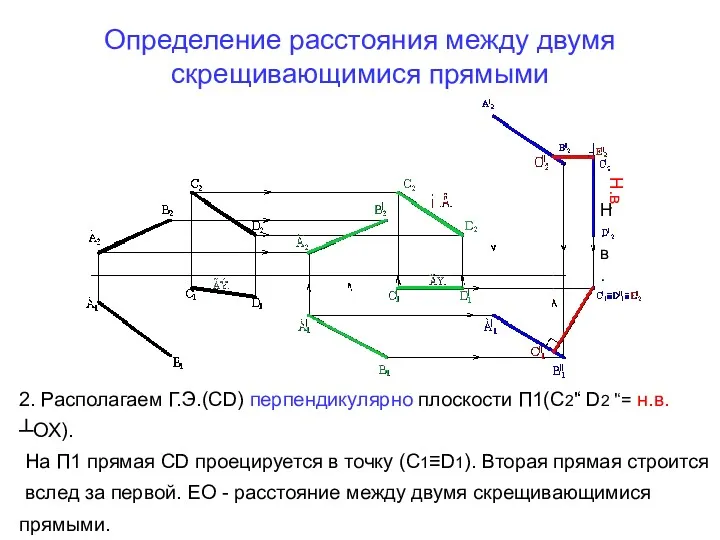
- 77. Определение расстояния между двумя скрещивающимися прямыми Н.в. Н.в. 2. Располагаем Г.Э.(СD) перпендикулярно плоскости П1(С2'‘ D2 '‘=
- 78. Преобразование плоскости общего положения в проецирующую и определение угла наклона плоскости к плоскости проекций Чтобы определить
- 79. Определение натуральной величины плоской фигуры Задача решается в два действия. Плоскость общего положения преобразовывают в проецирующую.
- 80. Задача 7.5 стр.36 Определить натуральную величину треугольника СDE Решение: Необходимо развернуть плоскость общего положения в новое,
- 81. 1) Преобразуем плоскость в положение проецирующей Для этого зададим в плоскости ΔСDЕ линию уровня, например горизонталь
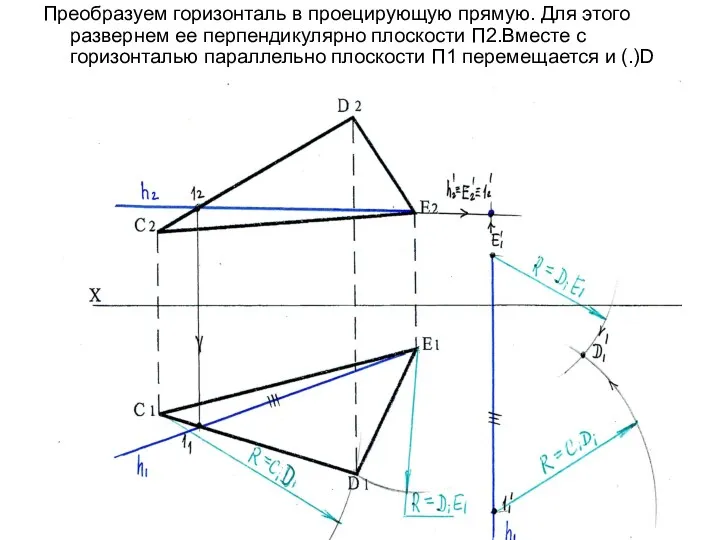
- 82. Преобразуем горизонталь в проецирующую прямую. Для этого развернем ее перпендикулярно плоскости П2.Вместе с горизонталью параллельно плоскости
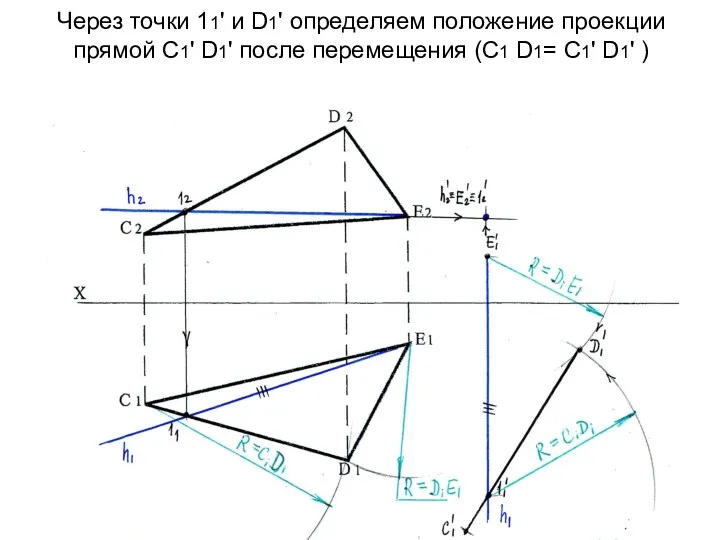
- 83. Через точки 11' и D1' определяем положение проекции прямой С1' D1' после перемещения (С1 D1= С1'
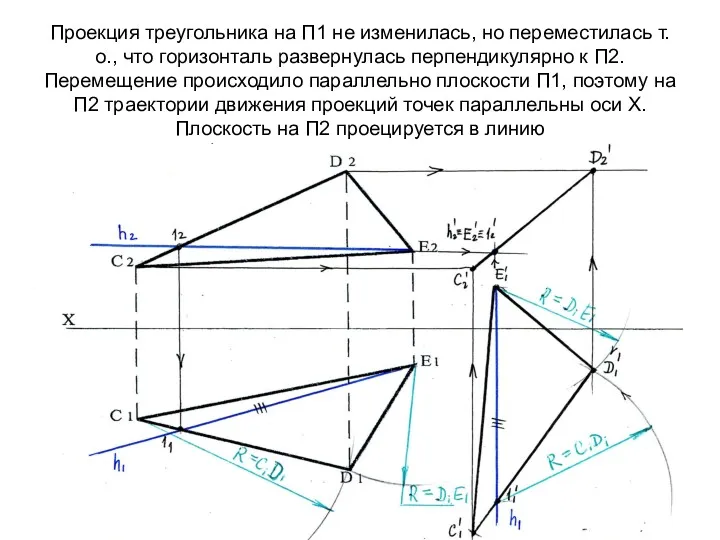
- 84. Проекция треугольника на П1 не изменилась, но переместилась т.о., что горизонталь развернулась перпендикулярно к П2. Перемещение
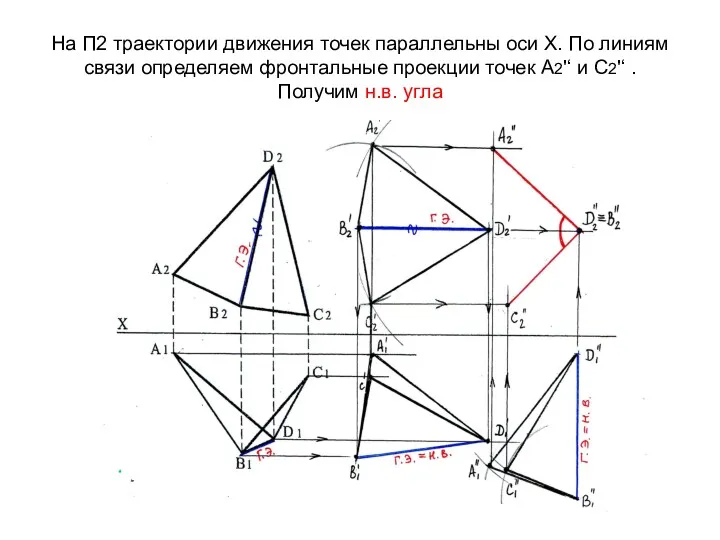
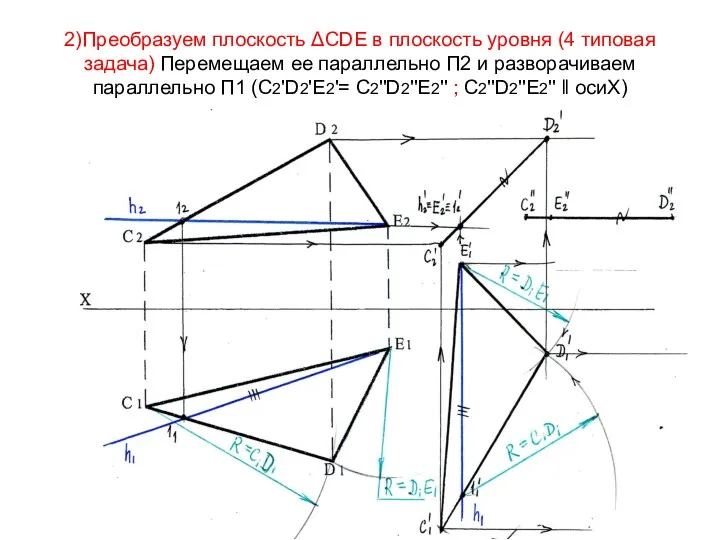
- 85. 2)Преобразуем плоскость ΔСDЕ в плоскость уровня (4 типовая задача) Перемещаем ее параллельно П2 и разворачиваем параллельно
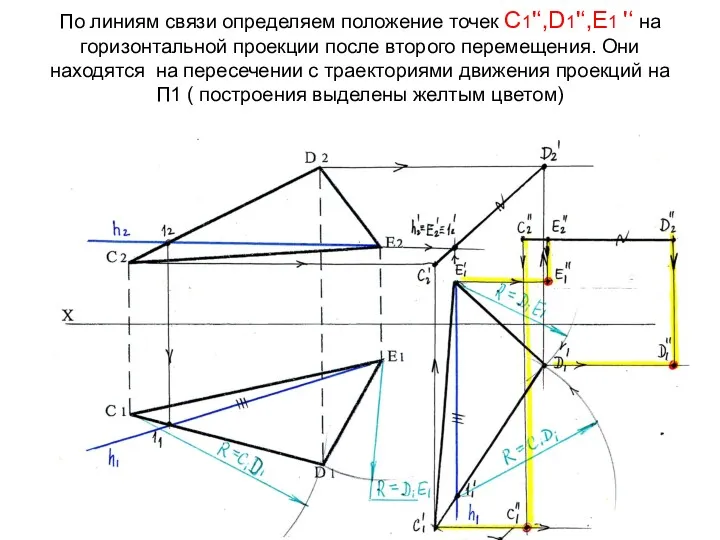
- 86. По линиям связи определяем положение точек С1'‘,D1'‘,Е1 '‘ на горизонтальной проекции после второго перемещения. Они находятся
- 88. Скачать презентацию
Общие положения
В данной группе методов исходный базис (П1 иП2) жестко зафиксирован
Общие положения
В данной группе методов исходный базис (П1 иП2) жестко зафиксирован
Общие положения
Независимо от метода преобразования, в задаче выделяется главный элемент, с
Общие положения
Независимо от метода преобразования, в задаче выделяется главный элемент, с
Общие положения
Типовые задачи:
Главный элемент – прямая
Прямую общего положения преобразовать в линию
Общие положения
Типовые задачи:
Главный элемент – прямая
Прямую общего положения преобразовать в линию
Общие положения
Главный элемент – плоскость
3) Плоскость общего положения преобразовать в проецирующую
Общие положения
Главный элемент – плоскость
3) Плоскость общего положения преобразовать в проецирующую
Вращение вокруг проецирующих осей
Сущность метода вращения вокруг проецирующих осей состоит в
Вращение вокруг проецирующих осей
Сущность метода вращения вокруг проецирующих осей состоит в
Преобразование отрезка прямой общего положения в прямую уровня (1 типовая задача)
Задача
Преобразование отрезка прямой общего положения в прямую уровня (1 типовая задача)
Задача
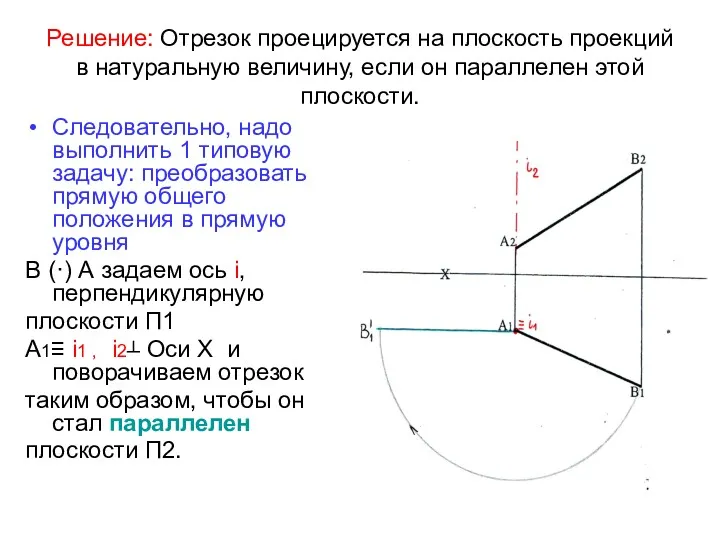
Решение: Отрезок проецируется на плоскость проекций в натуральную величину, если он
Решение: Отрезок проецируется на плоскость проекций в натуральную величину, если он
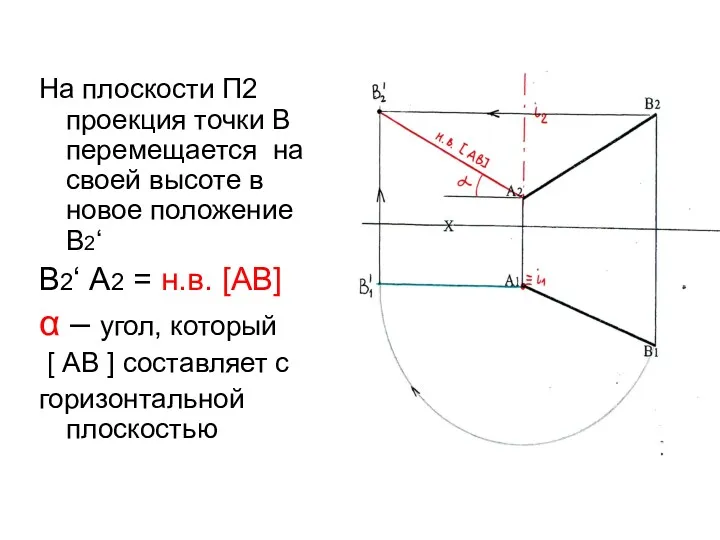
На плоскости П2 проекция точки В перемещается на своей высоте в
На плоскости П2 проекция точки В перемещается на своей высоте в
Преобразование отрезка прямой общего положения в проецирующий (2 типовая задача)
В том
Преобразование отрезка прямой общего положения в проецирующий (2 типовая задача)
В том
Преобразование плоскости общего положения в проецирующую (3 типовая задача)
Плоскость общего положения
перпендикулярна
Преобразование плоскости общего положения в проецирующую (3 типовая задача)
Плоскость общего положения
перпендикулярна
Преобразование плоскости общего положения в проецирующую и определение угла наклона плоскости
Преобразование плоскости общего положения в проецирующую и определение угла наклона плоскости
Преобразование плоскости общего положения в плоскость уровня (4 типовая задача)
Задача решается
Преобразование плоскости общего положения в плоскость уровня (4 типовая задача)
Задача решается
Преобразование плоскости общего положения в плоскость уровня (4 типовая задача)
Задача 7.2
Преобразование плоскости общего положения в плоскость уровня (4 типовая задача)
Задача 7.2
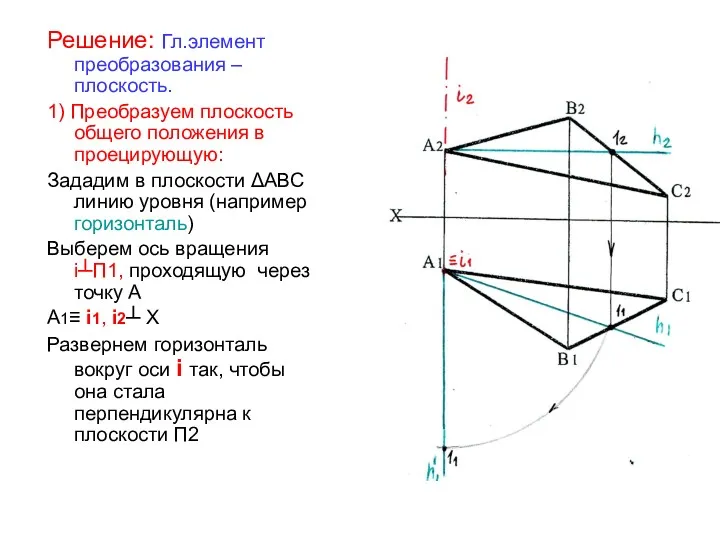
Решение: Гл.элемент преобразования – плоскость.
1) Преобразуем плоскость общего положения в проецирующую:
Зададим
Решение: Гл.элемент преобразования – плоскость.
1) Преобразуем плоскость общего положения в проецирующую:
Зададим
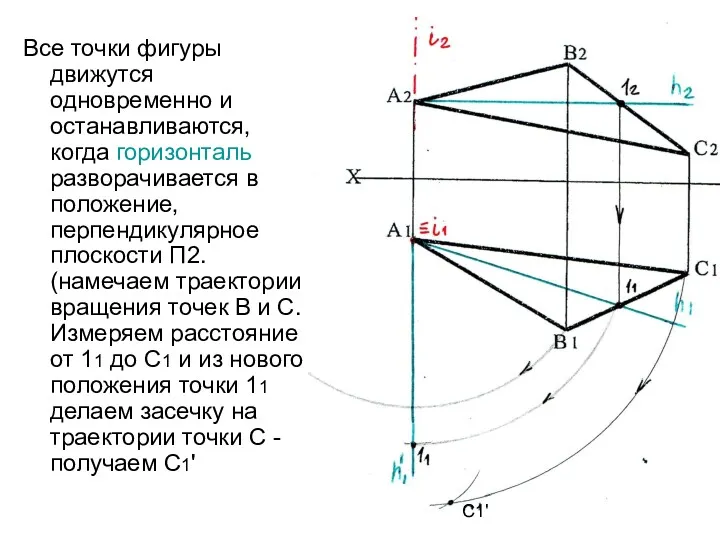
Все точки фигуры движутся одновременно и останавливаются, когда горизонталь разворачивается в
Все точки фигуры движутся одновременно и останавливаются, когда горизонталь разворачивается в
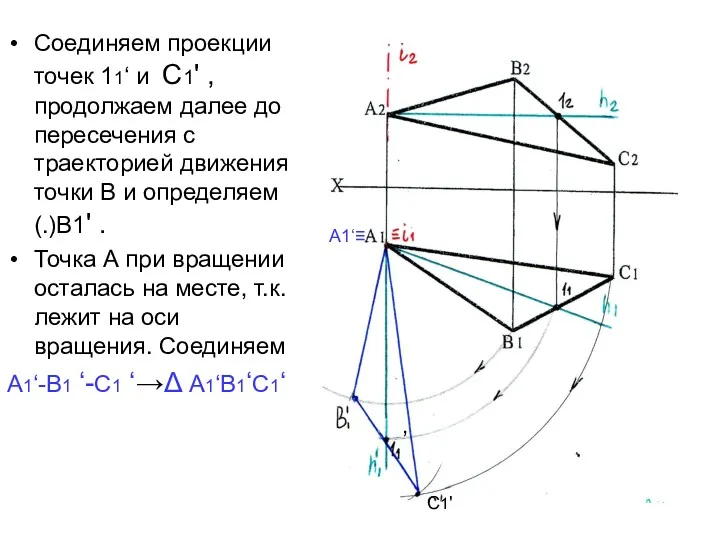
Соединяем проекции точек 11‘ и С1' , продолжаем далее до пересечения
Соединяем проекции точек 11‘ и С1' , продолжаем далее до пересечения
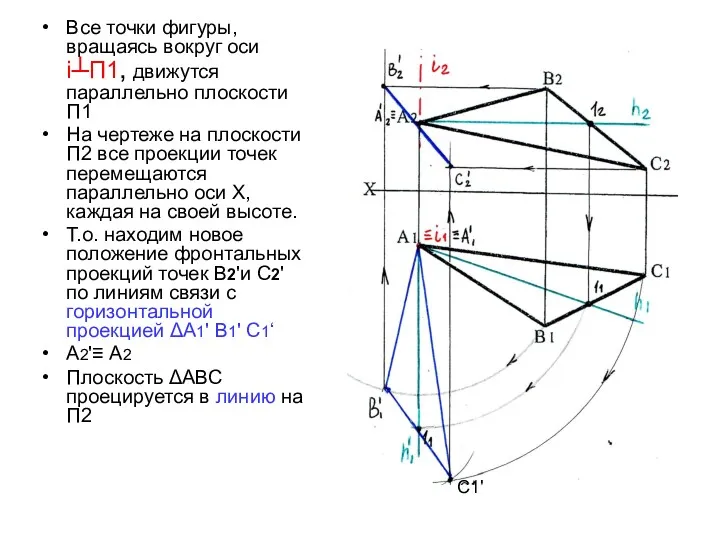
Все точки фигуры, вращаясь вокруг оси i┴П1, движутся параллельно плоскости
Все точки фигуры, вращаясь вокруг оси i┴П1, движутся параллельно плоскости
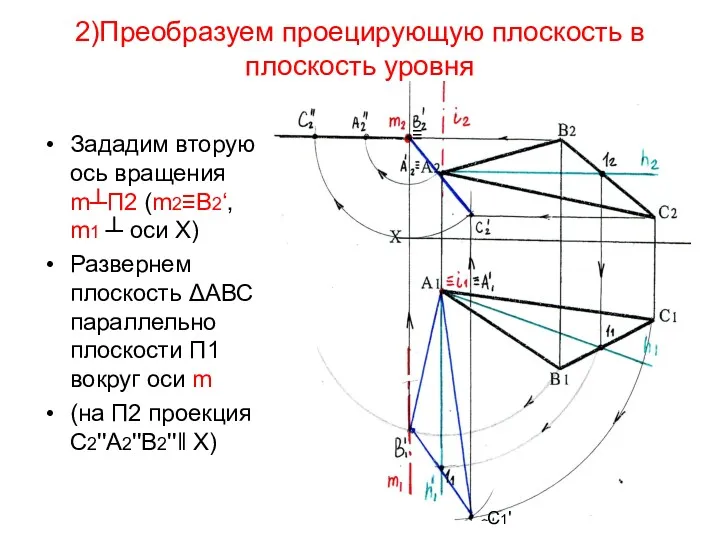
2)Преобразуем проецирующую плоскость в плоскость уровня
Зададим вторую ось вращения m┴П2 (m2≡В2‘,
2)Преобразуем проецирующую плоскость в плоскость уровня
Зададим вторую ось вращения m┴П2 (m2≡В2‘,
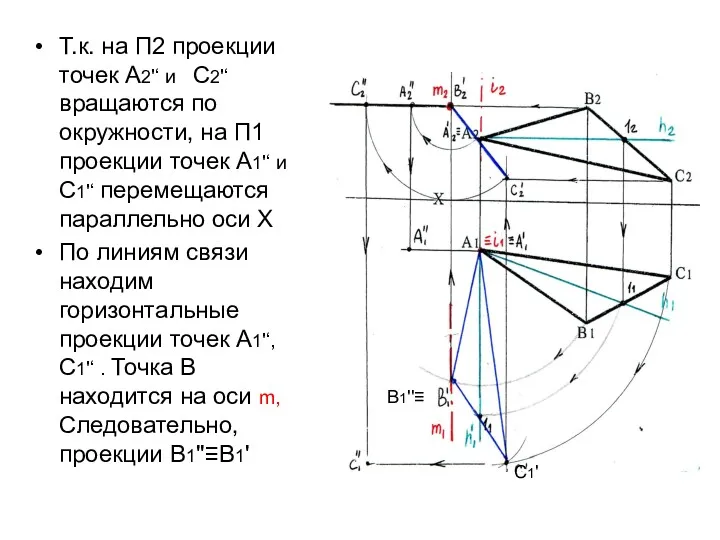
Т.к. на П2 проекции точек А2'‘ и С2'‘ вращаются по окружности,
Т.к. на П2 проекции точек А2'‘ и С2'‘ вращаются по окружности,
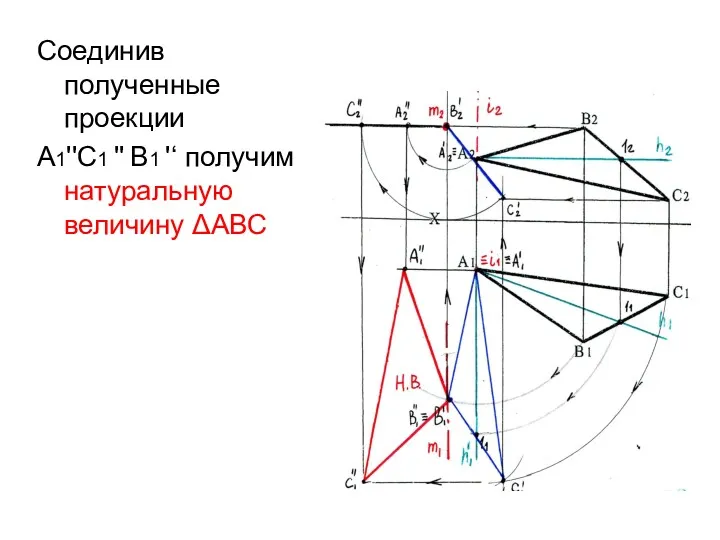
Соединив полученные проекции
А1''С1 '' В1 '‘ получим натуральную величину ΔАВС
Соединив полученные проекции
А1''С1 '' В1 '‘ получим натуральную величину ΔАВС
Вращение вокруг линий уровня
Этот способ применяется для преобразования плоскости общего положения
Вращение вокруг линий уровня
Этот способ применяется для преобразования плоскости общего положения
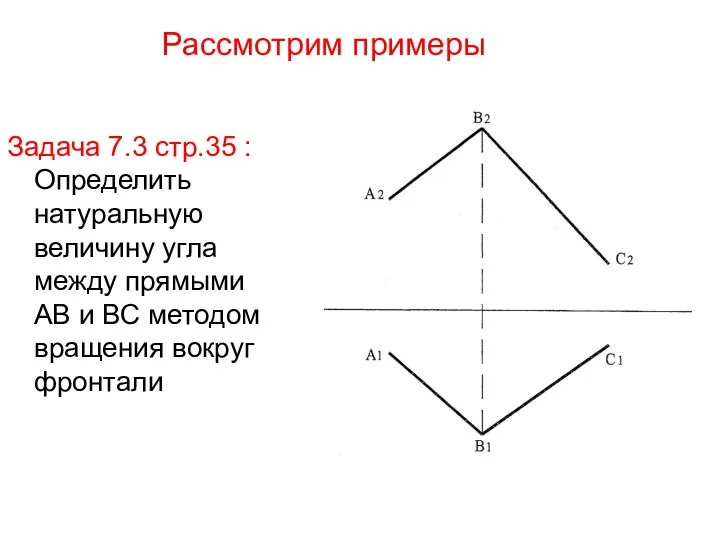
Рассмотрим примеры
Задача 7.3 стр.35 : Определить натуральную величину угла между прямыми
Рассмотрим примеры
Задача 7.3 стр.35 : Определить натуральную величину угла между прямыми
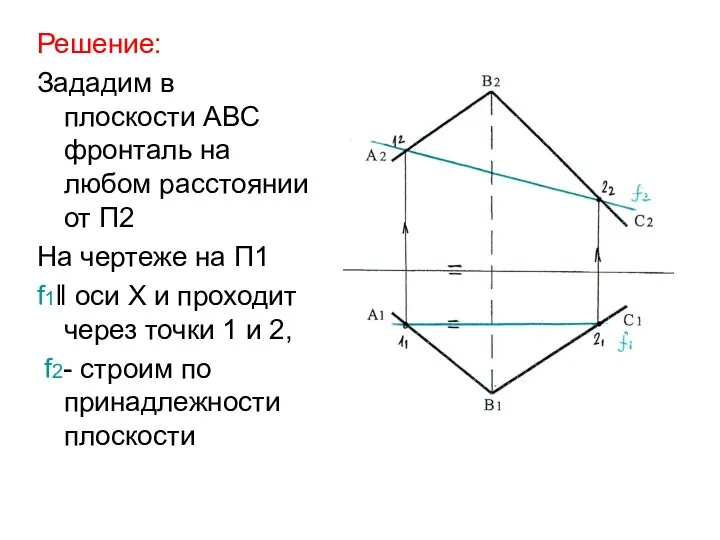
Решение:
Зададим в плоскости АВС фронталь на любом расстоянии от П2
На чертеже
Решение:
Зададим в плоскости АВС фронталь на любом расстоянии от П2
На чертеже
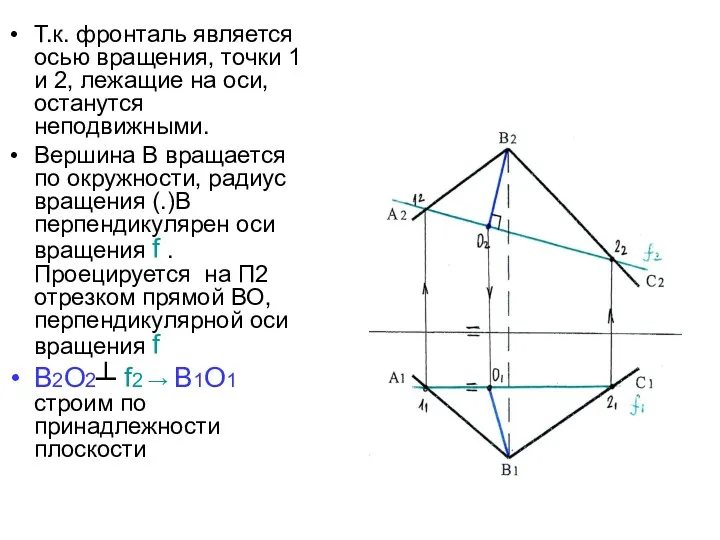
Т.к. фронталь является осью вращения, точки 1 и 2, лежащие на
Т.к. фронталь является осью вращения, точки 1 и 2, лежащие на
Так как плоскость АВС должна развернуться параллельно П2, радиус вращения точки
Так как плоскость АВС должна развернуться параллельно П2, радиус вращения точки
Траектория вращения точки В на П2 проецируется в линию, перпендикулярную оси
Траектория вращения точки В на П2 проецируется в линию, перпендикулярную оси
Точка В развернулась в положение, параллельное П2.
Угол β =н.в. угла между
Точка В развернулась в положение, параллельное П2.
Угол β =н.в. угла между
Задача 7.4 стр.35
Определить натуральную величину треугольника АВС вращением вокруг горизонтали
Задача 7.4 стр.35
Определить натуральную величину треугольника АВС вращением вокруг горизонтали
Решение:
Зададим в плоскости АВС горизонталь на любой высоте от П1 (например,
Решение:
Зададим в плоскости АВС горизонталь на любой высоте от П1 (например,
Т.к. горизонталь является осью вращения, точки 1 и А, лежащие на
Т.к. горизонталь является осью вращения, точки 1 и А, лежащие на
В2О2 и С2К2 строим по принадлежности плоскости треугольника
В2О2 и С2К2 строим по принадлежности плоскости треугольника
Так как плоскость АВС должна развернуться параллельно П1, радиусы вращения точек
Так как плоскость АВС должна развернуться параллельно П1, радиусы вращения точек
Траектория вращения точки В
Траектория вращения точки С
_________
__________________
Траектории вращения точек В и
Траектория вращения точки В
Траектория вращения точки С
_________
__________________
Траектории вращения точек В и
![Отложим по траектории вращения точки В отрезок ВО1 = н.в.[ВО]](/_ipx/f_webp&q_80&fit_contain&s_1440x1080/imagesDir/jpg/16583/slide-35.jpg)
Отложим по траектории вращения точки В отрезок ВО1 = н.в.[ВО] и
Отложим по траектории вращения точки В отрезок ВО1 = н.в.[ВО] и
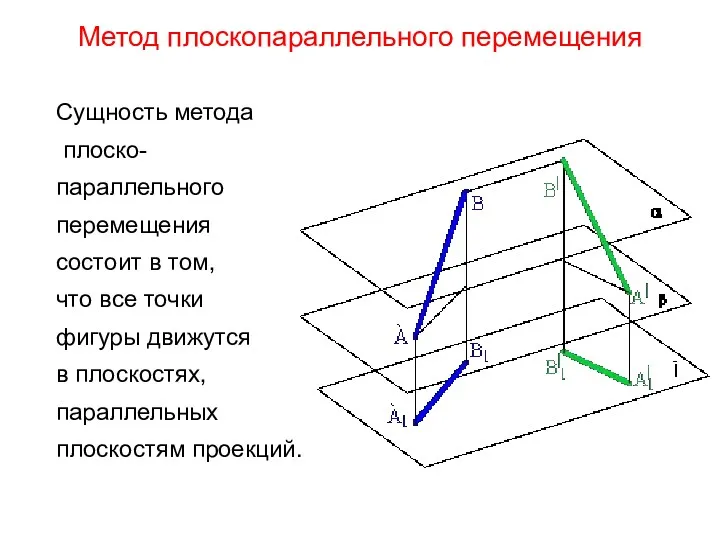
Метод плоскопараллельного перемещения
Сущность метода
плоско-
параллельного
перемещения
состоит в том,
что все точки
Метод плоскопараллельного перемещения
Сущность метода
плоско-
параллельного
перемещения
состоит в том,
что все точки
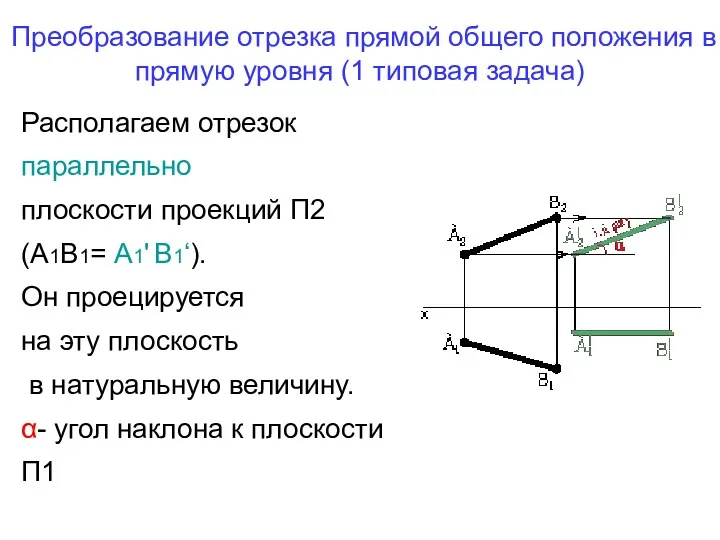
Преобразование отрезка прямой общего положения в прямую уровня (1 типовая задача)
Располагаем
Преобразование отрезка прямой общего положения в прямую уровня (1 типовая задача)
Располагаем
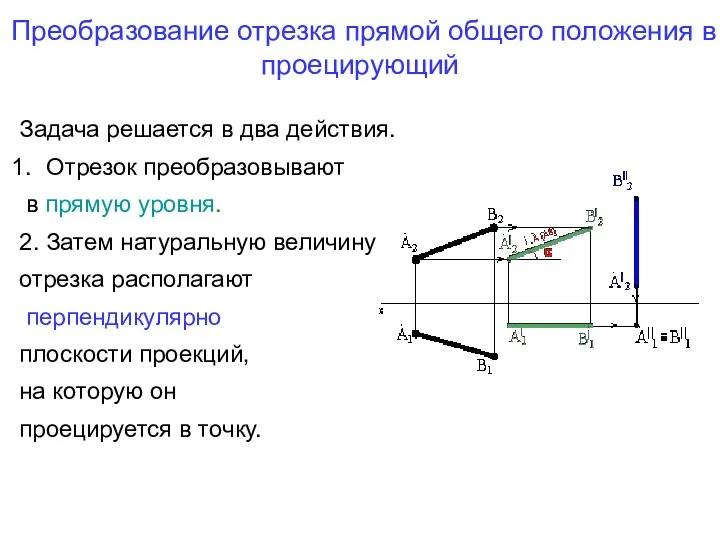
Преобразование отрезка прямой общего положения в проецирующий
Задача решается в два действия.
Отрезок
Преобразование отрезка прямой общего положения в проецирующий
Задача решается в два действия.
Отрезок
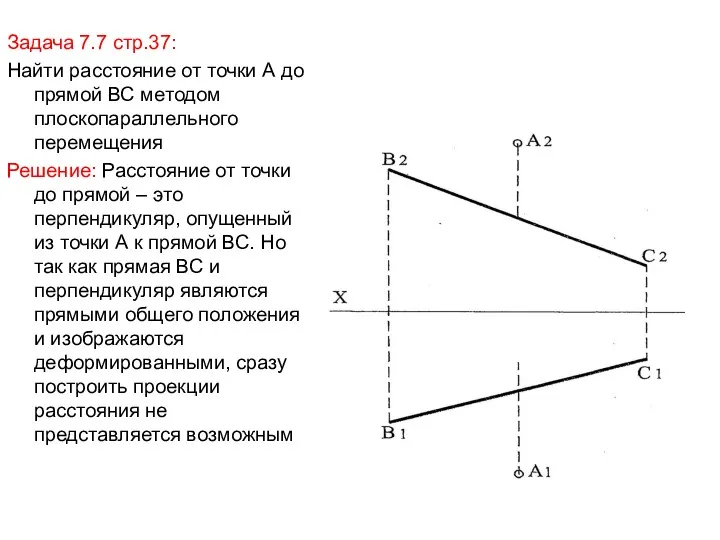
Задача 7.7 стр.37:
Найти расстояние от точки А до прямой ВС методом
Задача 7.7 стр.37:
Найти расстояние от точки А до прямой ВС методом
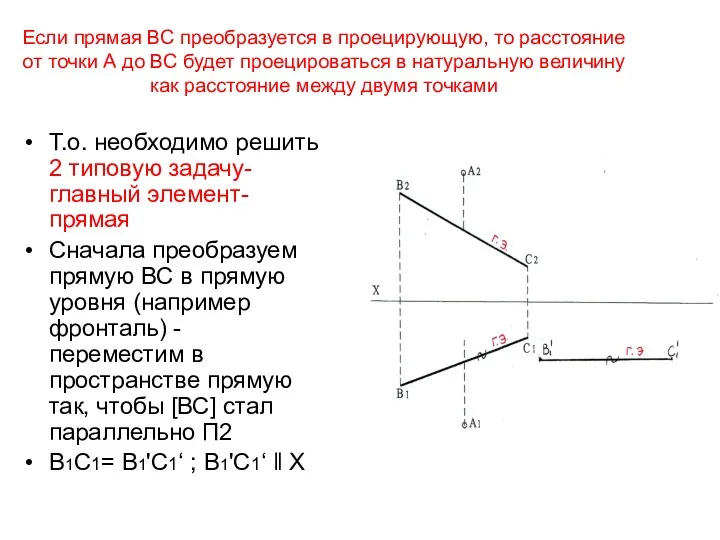
Если прямая ВС преобразуется в проецирующую, то расстояние от точки А
Если прямая ВС преобразуется в проецирующую, то расстояние от точки А
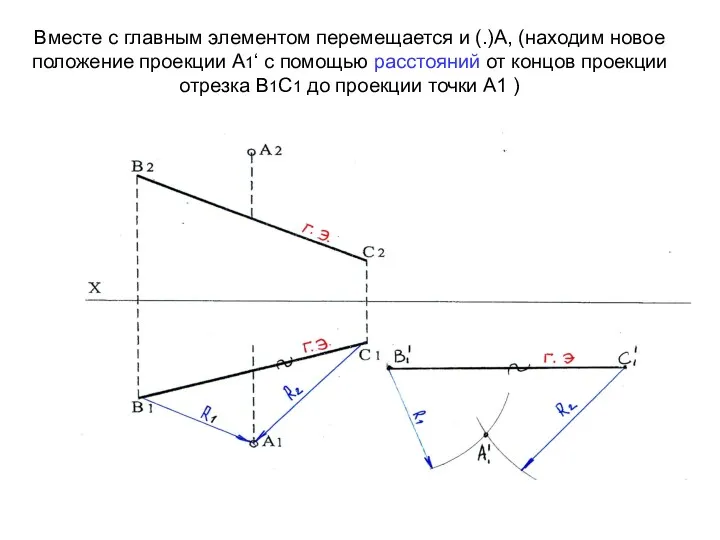
Вместе с главным элементом перемещается и (.)А, (находим новое положение проекции
Вместе с главным элементом перемещается и (.)А, (находим новое положение проекции
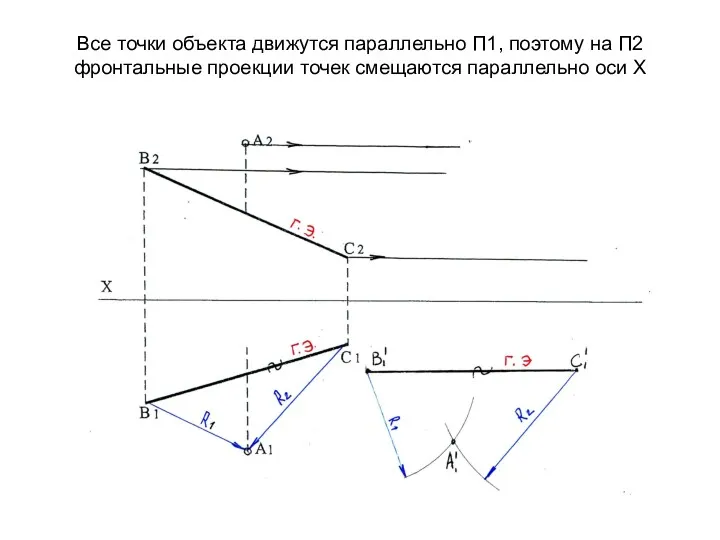
Все точки объекта движутся параллельно П1, поэтому на П2 фронтальные проекции
Все точки объекта движутся параллельно П1, поэтому на П2 фронтальные проекции
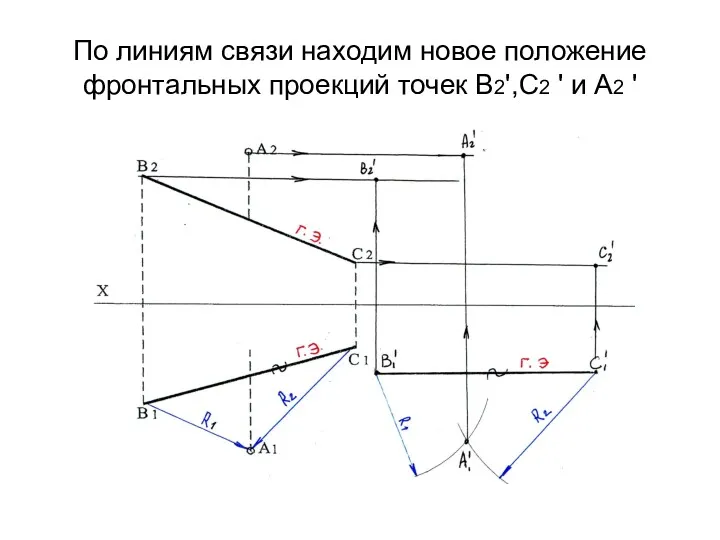
По линиям связи находим новое положение фронтальных проекций точек В2',С2 '
По линиям связи находим новое положение фронтальных проекций точек В2',С2 '
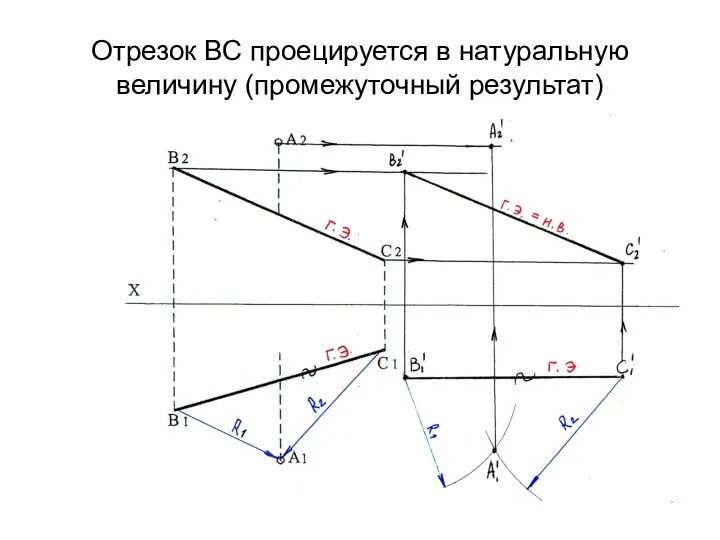
Отрезок ВС проецируется в натуральную величину (промежуточный результат)
Отрезок ВС проецируется в натуральную величину (промежуточный результат)
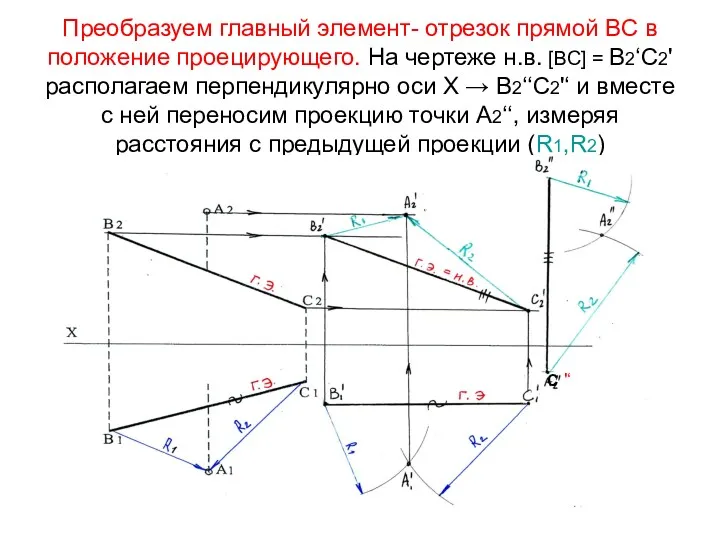
Преобразуем главный элемент- отрезок прямой ВС в положение проецирующего. На чертеже
Преобразуем главный элемент- отрезок прямой ВС в положение проецирующего. На чертеже
На П1 проекции точек движутся параллельно оси Х и приходят в
На П1 проекции точек движутся параллельно оси Х и приходят в
Находим недостающую проекцию АО на П2. Т.к. на П1 отрезок проецируется
Находим недостающую проекцию АО на П2. Т.к. на П1 отрезок проецируется
Далее покажем, как выглядят проекции АО на исходных данных. Для этого
Далее покажем, как выглядят проекции АО на исходных данных. Для этого
По линиям связи определим горизонтальную проекцию О1‘ и, соединив с А1‘,
По линиям связи определим горизонтальную проекцию О1‘ и, соединив с А1‘,
Далее по линиям связи найдем проекции О2 (параллельно оси Х на
Далее по линиям связи найдем проекции О2 (параллельно оси Х на
Второй вариант возврата точки О на исходные проекции: измеряем расстояние а
Второй вариант возврата точки О на исходные проекции: измеряем расстояние а
Определение расстояния между параллельными прямыми способом плоскопараллельного перемещения
Задача 7.8 стр.37
Найти расстояние
Определение расстояния между параллельными прямыми способом плоскопараллельного перемещения
Задача 7.8 стр.37
Найти расстояние
Выбираем главный элемент преобразования- например АВ (Г.Э.) и преобразовываем АВ в
Выбираем главный элемент преобразования- например АВ (Г.Э.) и преобразовываем АВ в
Т.к. вместе с главным элементом АВ перемещается и прямая СD, находим
Т.к. вместе с главным элементом АВ перемещается и прямая СD, находим
Т.к. прямые параллельны, то и при развороте АВ в положение, параллельное
Т.к. прямые параллельны, то и при развороте АВ в положение, параллельное
По линиям связи определяем фронтальные проекции точек А, В, С и
По линиям связи определяем фронтальные проекции точек А, В, С и
На П2 фронтальные проекции прямых в новом положении проецируются в натуральную
На П2 фронтальные проекции прямых в новом положении проецируются в натуральную
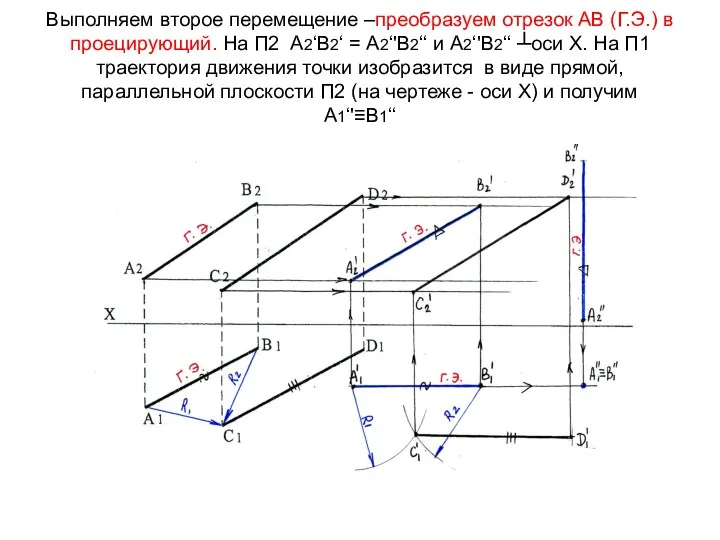
Выполняем второе перемещение –преобразуем отрезок АВ (Г.Э.) в проецирующий. На П2
Выполняем второе перемещение –преобразуем отрезок АВ (Г.Э.) в проецирующий. На П2
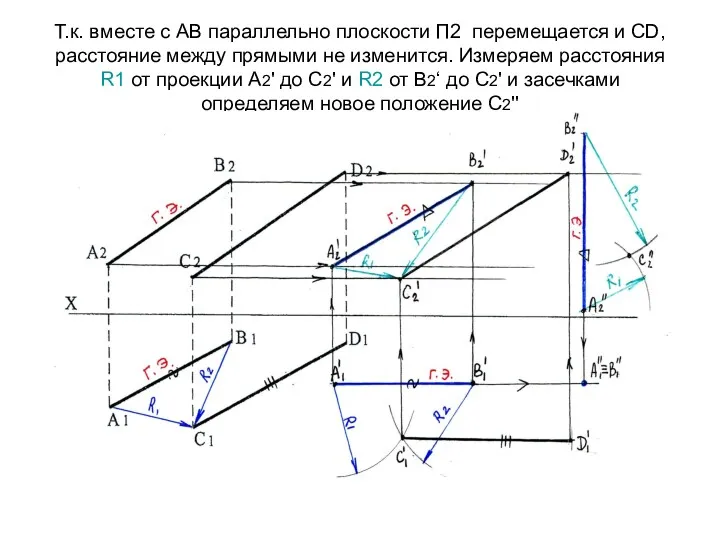
Т.к. вместе с АВ параллельно плоскости П2 перемещается и СD, расстояние
Т.к. вместе с АВ параллельно плоскости П2 перемещается и СD, расстояние
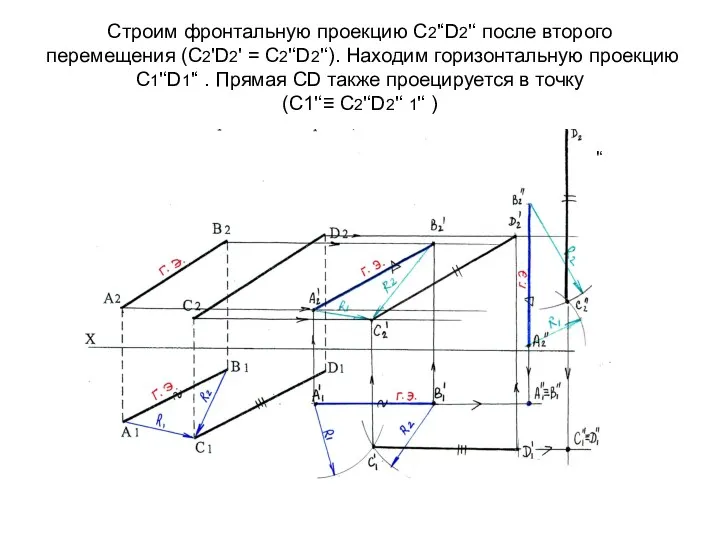
Строим фронтальную проекцию С2'‘D2'‘ после второго перемещения (С2'D2' = С2'‘D2'‘). Находим
Строим фронтальную проекцию С2'‘D2'‘ после второго перемещения (С2'D2' = С2'‘D2'‘). Находим
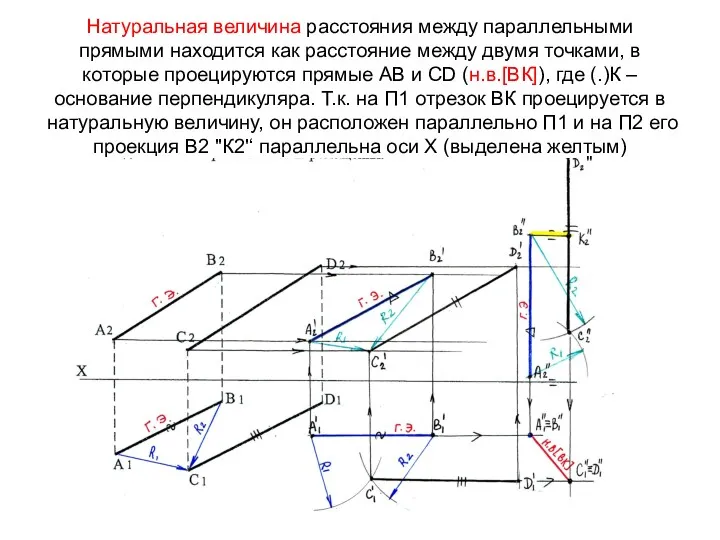
Натуральная величина расстояния между параллельными прямыми находится как расстояние между двумя
Натуральная величина расстояния между параллельными прямыми находится как расстояние между двумя

Возвращаем проекции ВК на исходные позиции.
Т.к. В2 ''К2'‘ ┴С2 '‘D2'‘,
Возвращаем проекции ВК на исходные позиции. Т.к. В2 ''К2'‘ ┴С2 '‘D2'‘,

Возвращаем проекции ВК на исходные позиции. Можно определить положение проекции К2
Возвращаем проекции ВК на исходные позиции. Можно определить положение проекции К2
Определение натуральной величины
двугранного угла
Главный элемент
Чтобы определить натуральную
величину двугранного угла,
Определение натуральной величины
двугранного угла
Главный элемент
Чтобы определить натуральную
величину двугранного угла,
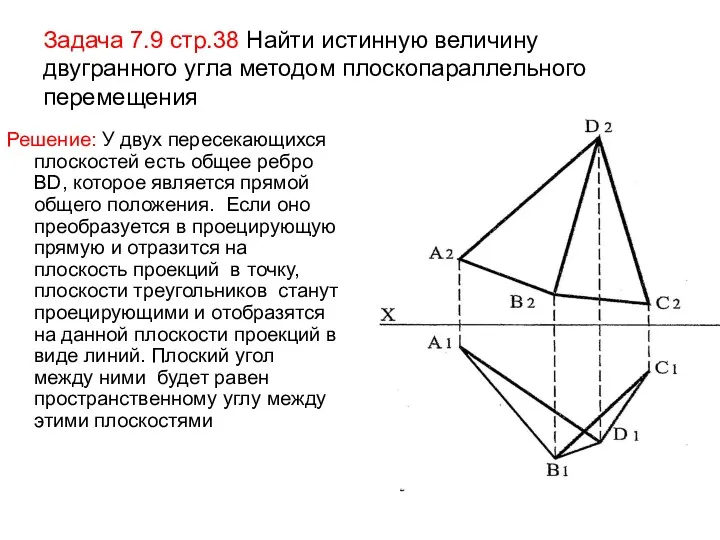
Задача 7.9 стр.38 Найти истинную величину двугранного угла методом плоскопараллельного перемещения
Решение:
Задача 7.9 стр.38 Найти истинную величину двугранного угла методом плоскопараллельного перемещения
Решение:

Таким образом, ВD – главный элемент (Г.Э.).
1) Преобразуем ВD в
Таким образом, ВD – главный элемент (Г.Э.). 1) Преобразуем ВD в
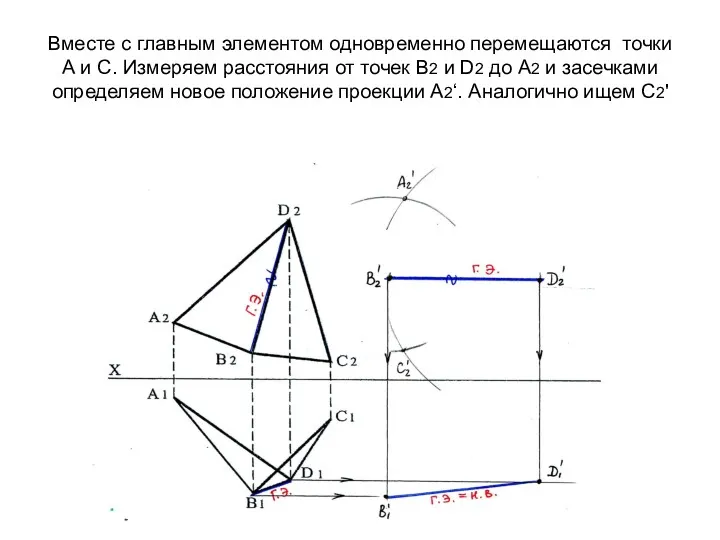
Вместе с главным элементом одновременно перемещаются точки А и С. Измеряем
Вместе с главным элементом одновременно перемещаются точки А и С. Измеряем
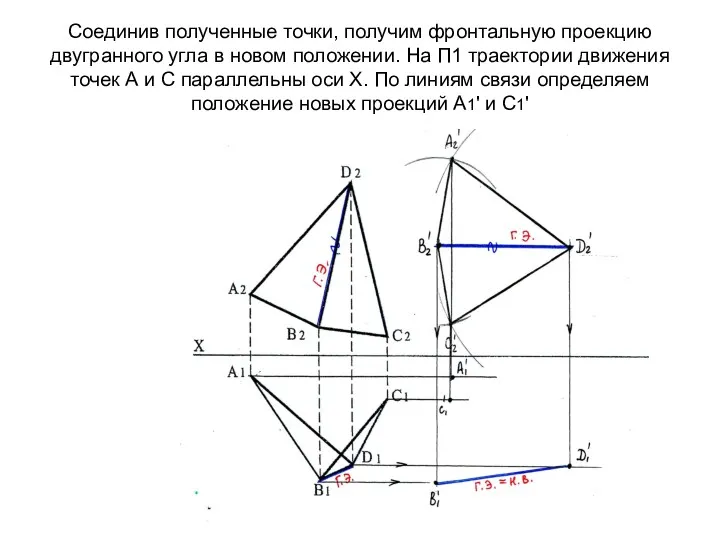
Соединив полученные точки, получим фронтальную проекцию двугранного угла в новом положении.
Соединив полученные точки, получим фронтальную проекцию двугранного угла в новом положении.
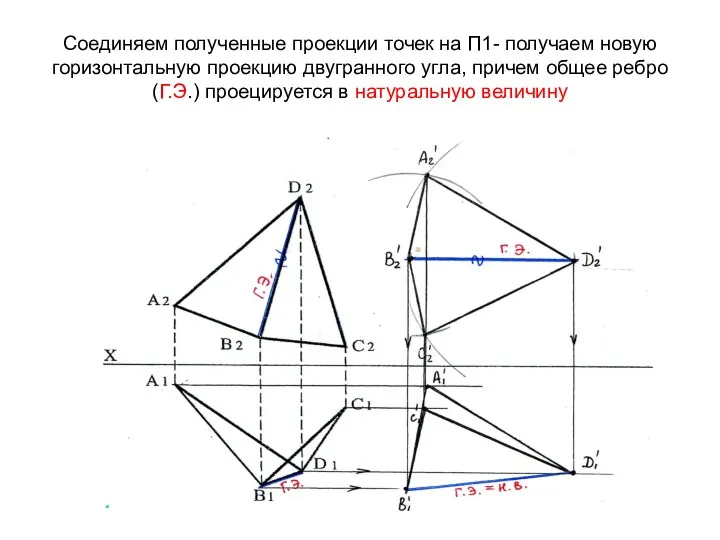
Соединяем полученные проекции точек на П1- получаем новую горизонтальную проекцию двугранного
Соединяем полученные проекции точек на П1- получаем новую горизонтальную проекцию двугранного
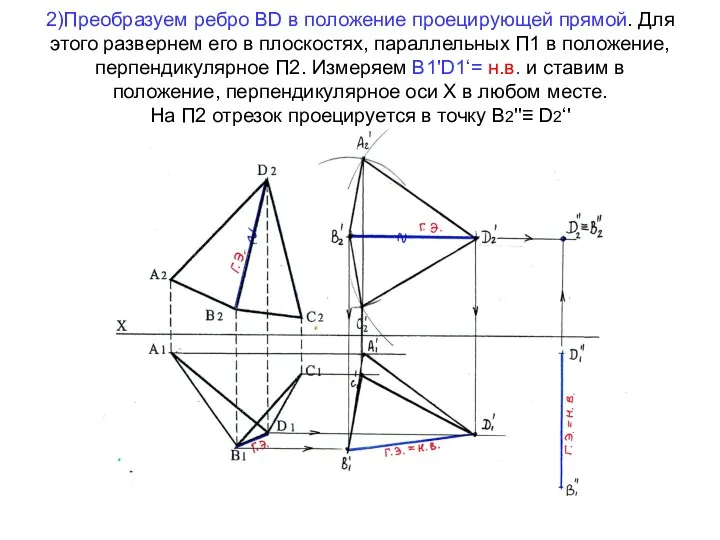
2)Преобразуем ребро ВD в положение проецирующей прямой. Для этого развернем его
2)Преобразуем ребро ВD в положение проецирующей прямой. Для этого развернем его
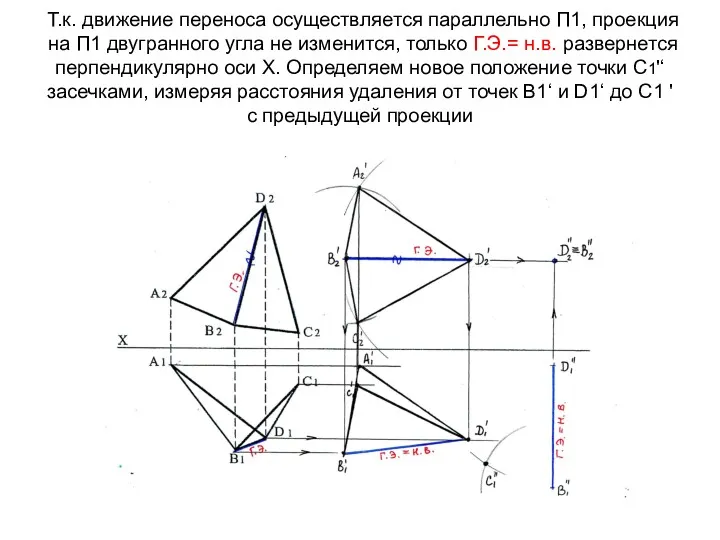
Т.к. движение переноса осуществляется параллельно П1, проекция на П1 двугранного угла
Т.к. движение переноса осуществляется параллельно П1, проекция на П1 двугранного угла
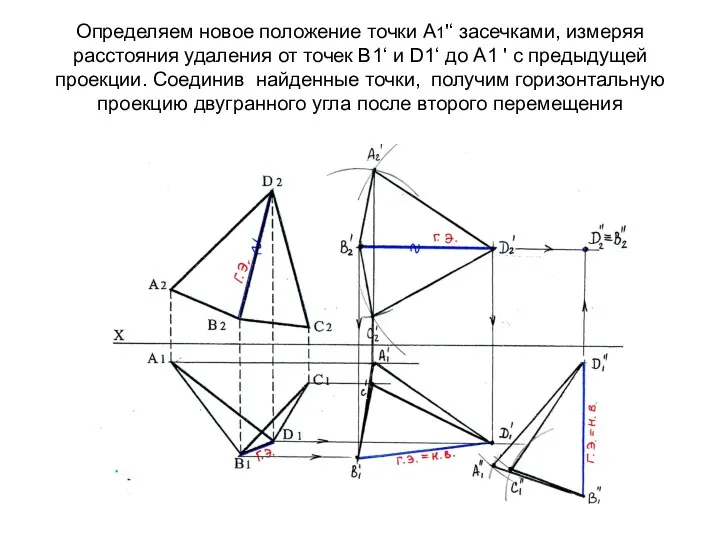
Определяем новое положение точки А1'‘ засечками, измеряя расстояния удаления от точек
Определяем новое положение точки А1'‘ засечками, измеряя расстояния удаления от точек
На П2 траектории движения точек параллельны оси Х. По линиям связи
На П2 траектории движения точек параллельны оси Х. По линиям связи
Определение расстояния между двумя скрещивающимися прямыми
Г.Э.
Чтобы определить расстояние
между двумя скрещивающимися
Определение расстояния между двумя скрещивающимися прямыми
Г.Э.
Чтобы определить расстояние
между двумя скрещивающимися
Определение расстояния между двумя скрещивающимися прямыми
Г.Э.
Г.Э.
Задача решается в два действия.
Выбираем
Определение расстояния между двумя скрещивающимися прямыми
Г.Э.
Г.Э.
Задача решается в два действия.
Выбираем
Определение расстояния между двумя скрещивающимися прямыми
Н.в.
Н.в.
2. Располагаем Г.Э.(СD) перпендикулярно плоскости
Определение расстояния между двумя скрещивающимися прямыми
Н.в.
Н.в.
2. Располагаем Г.Э.(СD) перпендикулярно плоскости
Преобразование плоскости общего положения в проецирующую и определение угла наклона плоскости
Преобразование плоскости общего положения в проецирующую и определение угла наклона плоскости
Определение натуральной величины
плоской фигуры
Задача решается в два действия.
Плоскость общего
Определение натуральной величины
плоской фигуры
Задача решается в два действия.
Плоскость общего
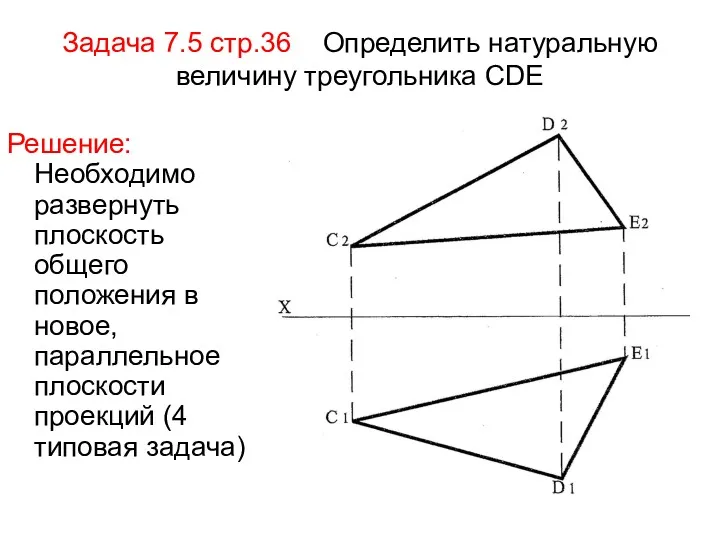
Задача 7.5 стр.36 Определить натуральную величину треугольника СDE
Решение: Необходимо развернуть плоскость
Задача 7.5 стр.36 Определить натуральную величину треугольника СDE
Решение: Необходимо развернуть плоскость
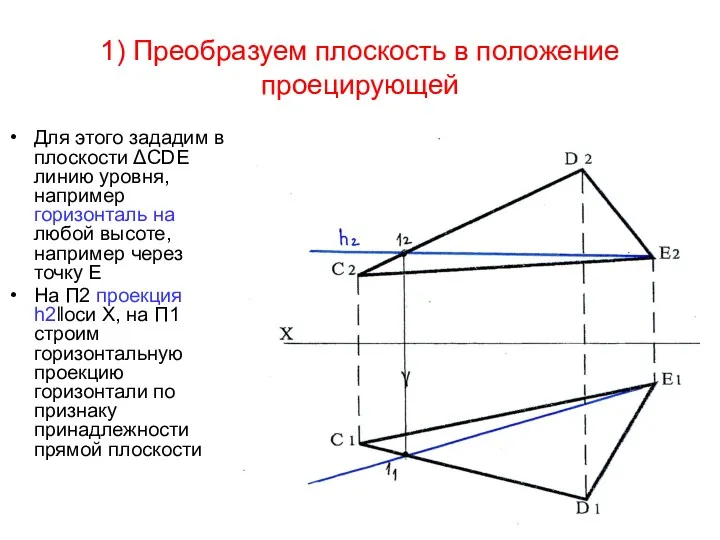
1) Преобразуем плоскость в положение проецирующей
Для этого зададим в плоскости ΔСDЕ
1) Преобразуем плоскость в положение проецирующей
Для этого зададим в плоскости ΔСDЕ
Преобразуем горизонталь в проецирующую прямую. Для этого развернем ее перпендикулярно
Преобразуем горизонталь в проецирующую прямую. Для этого развернем ее перпендикулярно
Через точки 11' и D1' определяем положение проекции прямой С1' D1'
Через точки 11' и D1' определяем положение проекции прямой С1' D1'
Проекция треугольника на П1 не изменилась, но переместилась т.о., что горизонталь
Проекция треугольника на П1 не изменилась, но переместилась т.о., что горизонталь
2)Преобразуем плоскость ΔСDЕ в плоскость уровня (4 типовая задача) Перемещаем ее
2)Преобразуем плоскость ΔСDЕ в плоскость уровня (4 типовая задача) Перемещаем ее
По линиям связи определяем положение точек С1'‘,D1'‘,Е1 '‘ на горизонтальной проекции
По линиям связи определяем положение точек С1'‘,D1'‘,Е1 '‘ на горизонтальной проекции
 Деление на десятичную дробь
Деление на десятичную дробь Вписанная и описанная окружности. Часть 1. 8 класс
Вписанная и описанная окружности. Часть 1. 8 класс Основные математические положения, применяемые для анализа и построения статистической модели
Основные математические положения, применяемые для анализа и построения статистической модели Сложение и вычитание одночленов
Сложение и вычитание одночленов Арифметические действия (повторение)
Арифметические действия (повторение) Методы кибернетики
Методы кибернетики Множества точек на координатной прямой
Множества точек на координатной прямой Математика в жизни моей семьи
Математика в жизни моей семьи По сказочной стране Геометрии (конспект с презентацией)
По сказочной стране Геометрии (конспект с презентацией) Нахождение дроби от числа
Нахождение дроби от числа Решение задач №19. Проценты
Решение задач №19. Проценты Тест по математике
Тест по математике Выпуклый анализ. Выпуклые множества. Лекция 5
Выпуклый анализ. Выпуклые множества. Лекция 5 Теріс сандарды қосу
Теріс сандарды қосу Тени. Общие положения. Чертежи пространственных фигур. (Лекция 12)
Тени. Общие положения. Чертежи пространственных фигур. (Лекция 12) Масштаб. Решение задач
Масштаб. Решение задач Математика в средневековой Индии
Математика в средневековой Индии Графический способ решения уравнений
Графический способ решения уравнений Знакомство с задачами
Знакомство с задачами Движение
Движение Весёлая математика. Задачи в стихах
Весёлая математика. Задачи в стихах сумма трёх и более слагаемых
сумма трёх и более слагаемых Прямые. Взаимное расположение прямых в пространстве. Признак скрещивающихся прямых
Прямые. Взаимное расположение прямых в пространстве. Признак скрещивающихся прямых Элементы стереометрии
Элементы стереометрии Предел функции в бесконечности
Предел функции в бесконечности Уменьшаемое, вычитаемое, разность
Уменьшаемое, вычитаемое, разность Случайные события. Вероятность события
Случайные события. Вероятность события Задачи на построение сечений. 10 класс
Задачи на построение сечений. 10 класс