- Метрические задачи. (Лекция 3)

Содержание
- 2. Метод преобразования чертежа П1 П2 А l1 А1 l2 Ах Х ZА YА А2 0 АА1=А2Ах
- 3. Способ преобразования чертежа П4⊥ П2
- 4. 1.2.Метрические задачи. Метод преобразования чертежа А1А4⊥ Х1; Х1 П2 П1 А4 В4 П1 П4 В2 В1
- 5. 1.2.Метрические задачи. Метод преобразования чертежа Х1//А1В1 А1А4⊥ Х1; В1В4⊥ Х1 α
- 6. Метод прямоугольного треугольника ΔY|А-В| ΔY|А-В| В0 Н.в. Задано: Две проекции отрезка АВ ; Построить: Действительный вид
- 7. Определение углов наклона отрезка прямой линии Х2 А5 В5 β X3 C5 D5 γ
- 8. Преобразование чертежа h1 Kx1 П4 h (K4)=h4 K c c4 Σ (h ∩ c)= K; Σ1(
- 9. Определение угла наклона плоской фигуры к основным плоскостям проекций α А2 В2 С2 D2 С1 D1
- 10. Определение действительного вида плоской фигуры С4 А4 В4
- 11. Определение расстояний между объектами проецирования Пример 1. А2 А1 h2 h1 В1 В2 ΔZА-В Н.в. В0
- 12. Определение расстояние между объектами проецирования Пример 3. А2 А1 h2 h1 В1 В2 ΔZА-В Н.в. А0
- 14. Скачать презентацию
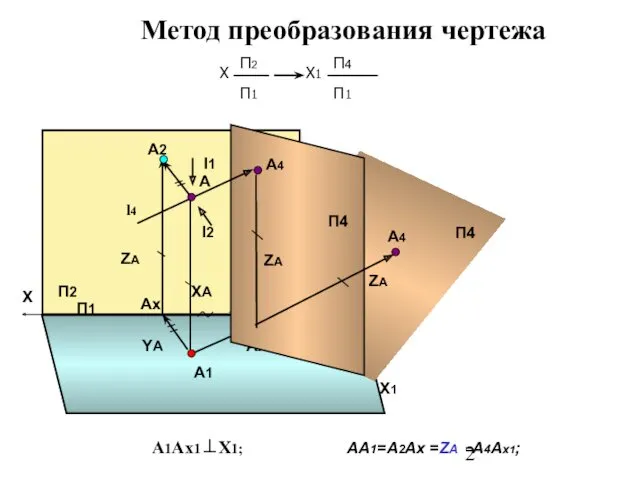
Метод преобразования чертежа
П1
П2
А
l1
А1
l2
Ах
Х
ZА
YА
А2
0
АА1=А2Ах =ZА =А4Ах1;
ХА
l4
Х1
А1Ах1⊥Х1;
Ах1
ZА
А4
П4
ZА
А4
П4
Метод преобразования чертежа
П1
П2
А
l1
А1
l2
Ах
Х
ZА
YА
А2
0
АА1=А2Ах =ZА =А4Ах1;
ХА
l4
Х1
А1Ах1⊥Х1;
Ах1
ZА
А4
П4
ZА
А4
П4
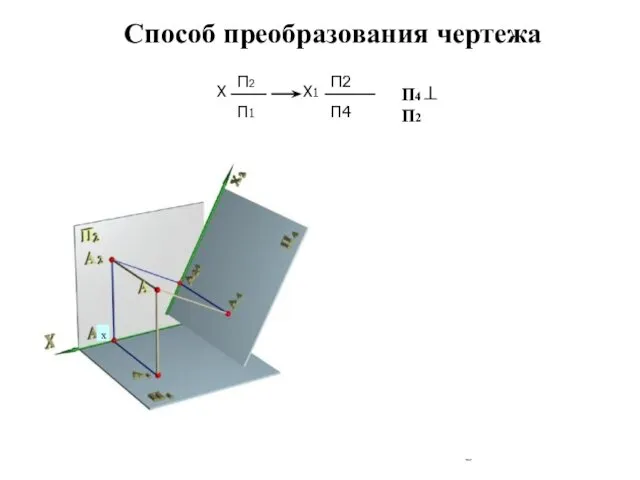
Способ преобразования чертежа
П4⊥ П2
Способ преобразования чертежа
П4⊥ П2
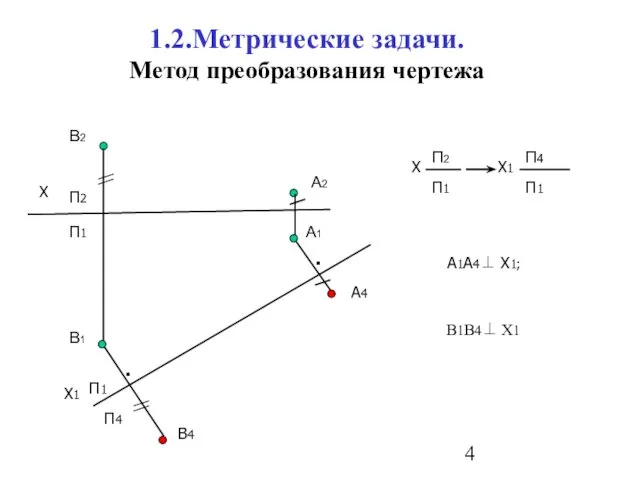
1.2.Метрические задачи.
Метод преобразования чертежа
А1А4⊥ Х1;
Х1
П2
П1
А4
В4
П1
П4
В2
В1
А2
А1
Х
▪
В1В4⊥ Х1
▪
1.2.Метрические задачи.
Метод преобразования чертежа
А1А4⊥ Х1;
Х1
П2
П1
А4
В4
П1
П4
В2
В1
А2
А1
Х
▪
В1В4⊥ Х1
▪
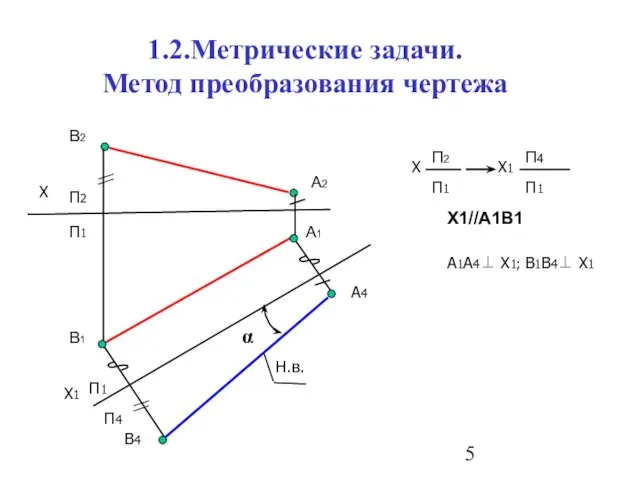
1.2.Метрические задачи.
Метод преобразования чертежа
Х1//А1В1
А1А4⊥ Х1; В1В4⊥ Х1
α
1.2.Метрические задачи.
Метод преобразования чертежа
Х1//А1В1
А1А4⊥ Х1; В1В4⊥ Х1
α
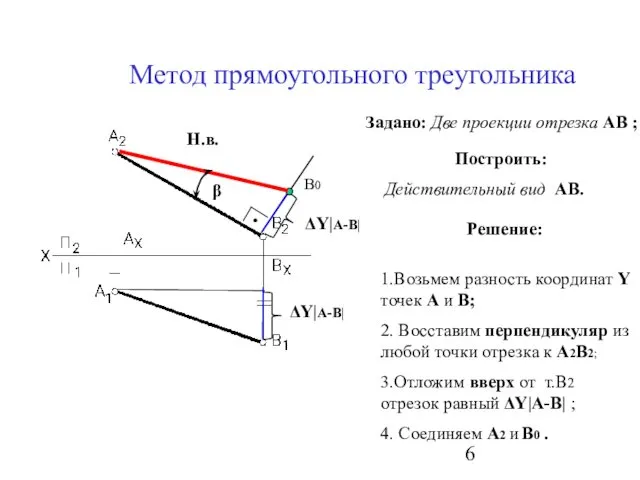
Метод прямоугольного треугольника
ΔY|А-В|
ΔY|А-В|
В0
Н.в.
Задано: Две проекции отрезка АВ ;
Построить:
Действительный вид АВ.
Решение:
1.Возьмем разность
Метод прямоугольного треугольника
ΔY|А-В|
ΔY|А-В|
В0
Н.в.
Задано: Две проекции отрезка АВ ;
Построить:
Действительный вид АВ.
Решение:
1.Возьмем разность
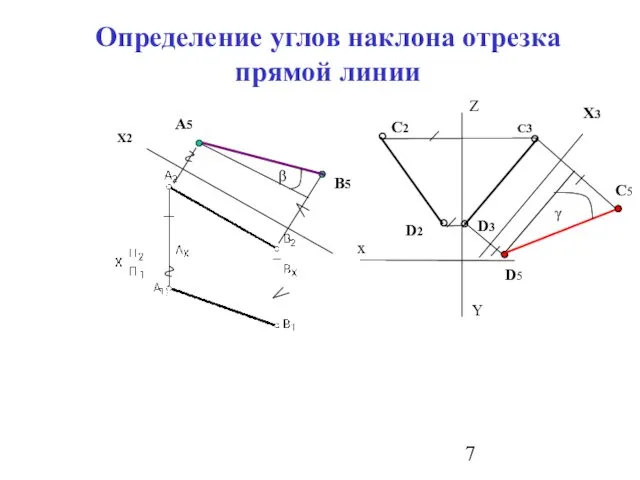
Определение углов наклона отрезка прямой линии
Х2
А5
В5
β
X3
C5
D5
γ
Определение углов наклона отрезка прямой линии
Х2
А5
В5
β
X3
C5
D5
γ
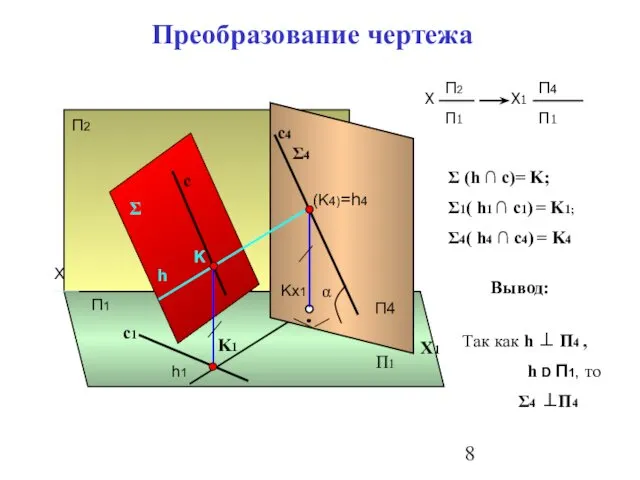
Преобразование чертежа
h1
Kx1
П4
h
(K4)=h4
K
c
c4
Σ (h ∩ c)= K;
Σ1( h1 ∩ c1) =
Преобразование чертежа
h1
Kx1
П4
h
(K4)=h4
K
c
c4
Σ (h ∩ c)= K;
Σ1( h1 ∩ c1) =
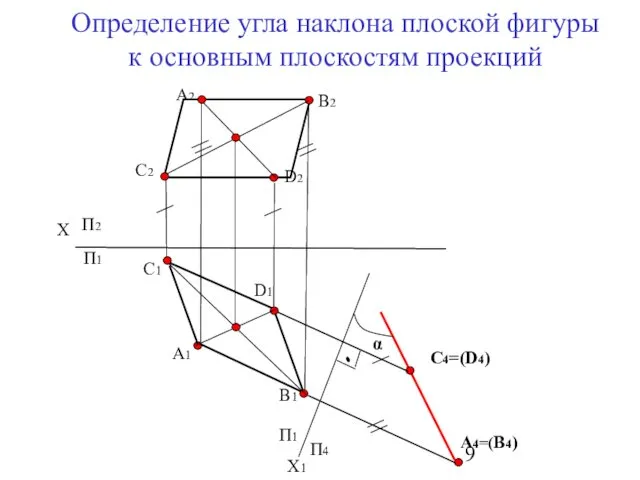
Определение угла наклона плоской фигуры к основным плоскостям проекций
α
А2
В2
С2
D2
С1
D1
В1
А1
С4=(D4)
А4=(В4)
Определение угла наклона плоской фигуры к основным плоскостям проекций
α
А2
В2
С2
D2
С1
D1
В1
А1
С4=(D4)
А4=(В4)
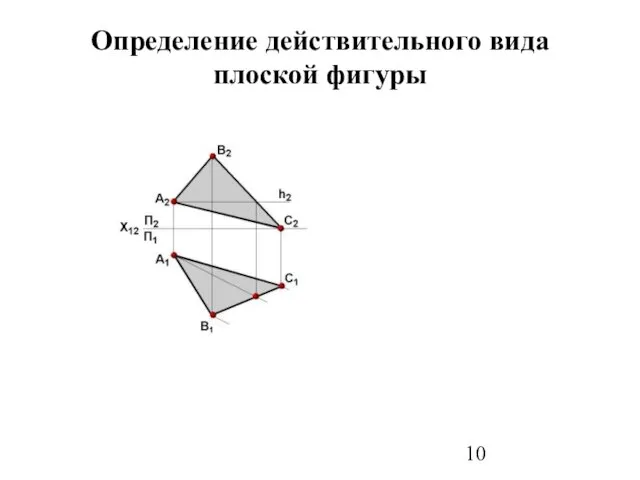
Определение действительного вида плоской фигуры
С4
А4
В4
Определение действительного вида плоской фигуры
С4
А4
В4
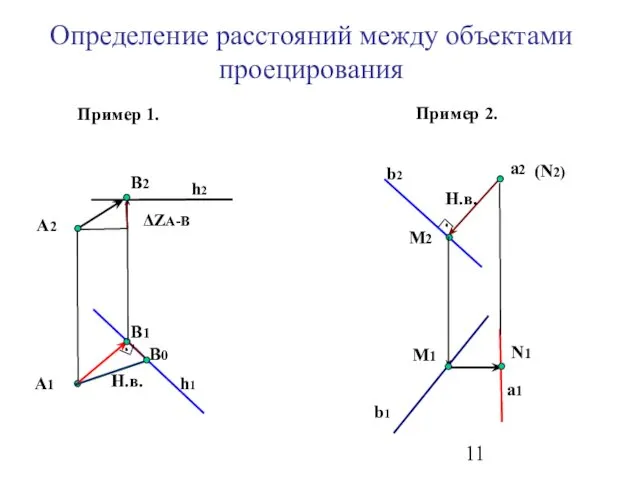
Определение расстояний между объектами проецирования
Пример 1.
А2
А1
h2
h1
В1
В2
ΔZА-В
Н.в.
В0
Пример 2.
b1
b2
а2
а1
M2
M1
N1
(N2)
Н.в.
Определение расстояний между объектами проецирования
Пример 1.
А2
А1
h2
h1
В1
В2
ΔZА-В
Н.в.
В0
Пример 2.
b1
b2
а2
а1
M2
M1
N1
(N2)
Н.в.
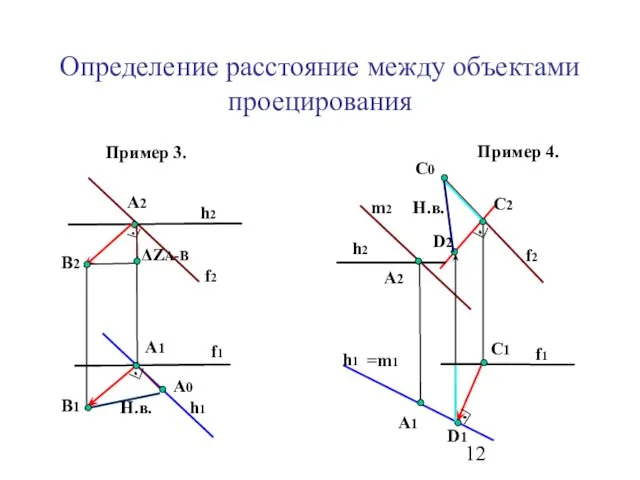
Определение расстояние между объектами проецирования
Пример 3.
А2
А1
h2
h1
В1
В2
ΔZА-В
Н.в.
А0
f2
f1
Пример 4.
h2
h1
А2
А1
m2
=m1
С2
С1
f2
f1
D1
D2
С0
Н.в.
Определение расстояние между объектами проецирования
Пример 3.
А2
А1
h2
h1
В1
В2
ΔZА-В
Н.в.
А0
f2
f1
Пример 4.
h2
h1
А2
А1
m2
=m1
С2
С1
f2
f1
D1
D2
С0
Н.в.
 Умножение. Переместительное свойство умножения. Математика. 5 класс
Умножение. Переместительное свойство умножения. Математика. 5 класс Основная теория по алгебре для ОГЭ
Основная теория по алгебре для ОГЭ Умножение десятичных дробей
Умножение десятичных дробей Решение уравнений. Раскройте скобки
Решение уравнений. Раскройте скобки Математика. 1 класс. Урок 7. Порядок
Математика. 1 класс. Урок 7. Порядок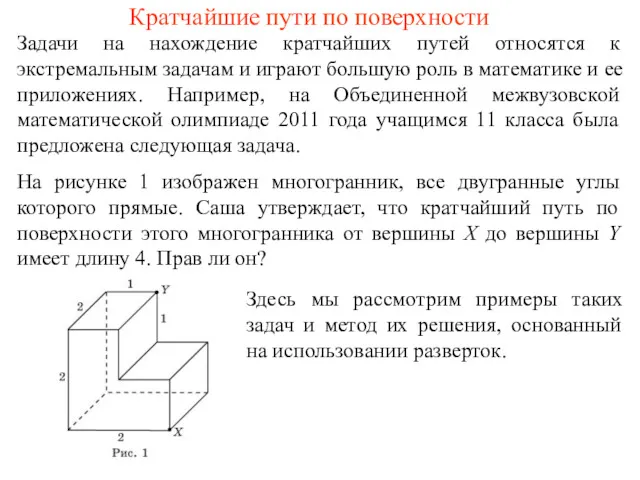 Кратчайшие пути на поверхности
Кратчайшие пути на поверхности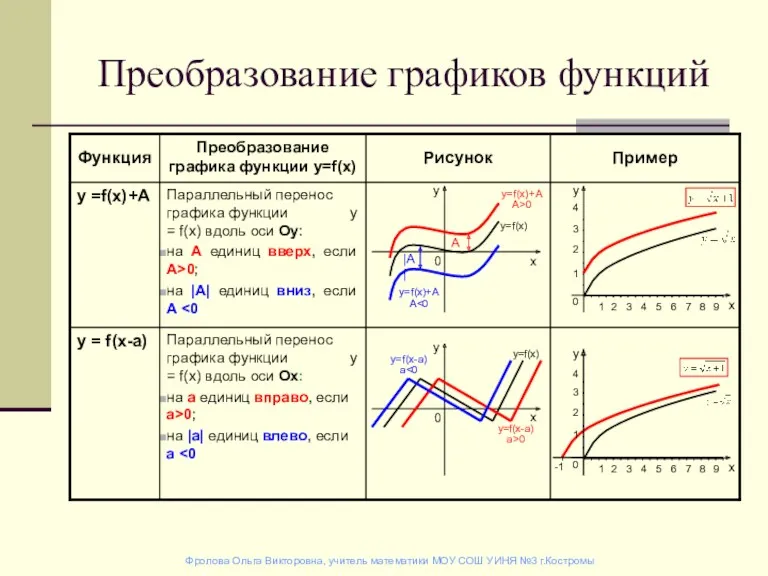 Преобразование графиков функций
Преобразование графиков функций Подготовка к ГИА по математике
Подготовка к ГИА по математике Построение сечений многогранников
Построение сечений многогранников Порядок действий в выражениях
Порядок действий в выражениях Практико-ориентированные задачи
Практико-ориентированные задачи Экстремум функции нескольких переменных. (Лекция 4)
Экстремум функции нескольких переменных. (Лекция 4) Дифференциальное исчисление функций нескольких переменных
Дифференциальное исчисление функций нескольких переменных Случаи сложения вида +7
Случаи сложения вида +7 Цифра и число 9
Цифра и число 9 Урок математики 2 класс Компоненты действия деления
Урок математики 2 класс Компоненты действия деления Сложение и вычитание обыкновенных дробей с разными знаменателями
Сложение и вычитание обыкновенных дробей с разными знаменателями Симметрия вокруг нас Диск
Симметрия вокруг нас Диск Площадь треугольника
Площадь треугольника Математика в профессиях членов моей семьи
Математика в профессиях членов моей семьи Стандартный вид числа
Стандартный вид числа Центральные и вписанные углы
Центральные и вписанные углы Табличное умножение и деление, сложение и вычитание. Тренажёр
Табличное умножение и деление, сложение и вычитание. Тренажёр Решение уравнений sinx=a. Понятие арксинуса числа
Решение уравнений sinx=a. Понятие арксинуса числа Путешествие в поисках приключений с Нэмо
Путешествие в поисках приключений с Нэмо Сложение и вычитание смешанных чисел
Сложение и вычитание смешанных чисел Деление обыкновенных дробей. 5 класс
Деление обыкновенных дробей. 5 класс 20231120_00273c-2130_2_0
20231120_00273c-2130_2_0