Определение. Примеры. Классификация и характеристика методов решения систем линейных уравнений презентация
- Определение. Примеры. Классификация и характеристика методов решения систем линейных уравнений

Содержание
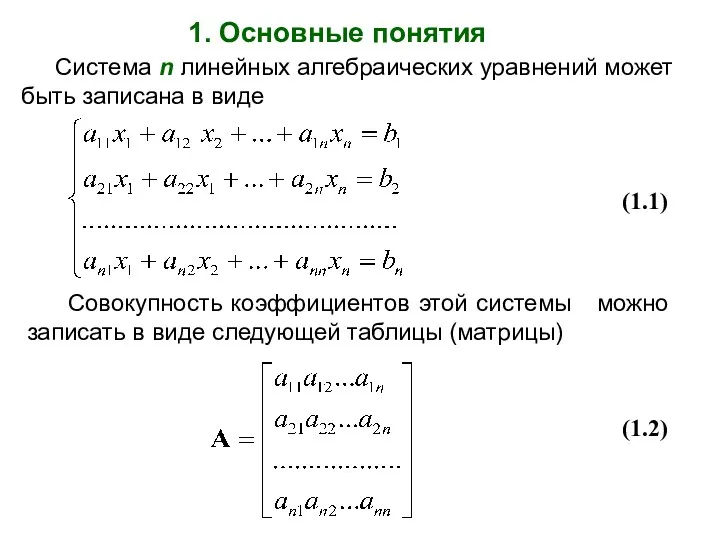
- 2. Определение. Примеры. К решению систем линейных алгебраических уравнений сводятся многочисленные практические задачи (уравнения материального баланса, уравнения
- 4. Данная таблица, состоящая из n строк и n столбцов и содержащая n2 элементов, называется квадратной матрицей
- 5. Определителем (детерминантом) матрицы А n-го порядка называется число D (иногда обозначают det A), равное (1.4) где
- 6. 2. Классификация и характеристика методов решения систем линейных уравнений Методы решения СЛУ делятся на две группы:
- 7. Прямые методы решения СЛУ Прямые методы используют конечные соотношения (формулы) для вычисления неизвестных. Они дают решения
- 8. Поэтому прямые методы используют обычно для сравнительно не больших (n Прямые методы решения иногда называют точными,
- 9. 2) Итерационные методы решения СЛУ Итерационными методами являются методы последовательных приближений. В них, как всегда, нужно
- 10. Достоинства итерационных методов: требуют хранения в памяти ЭВМ не всей матрицы системы, а лишь нескольких векторов
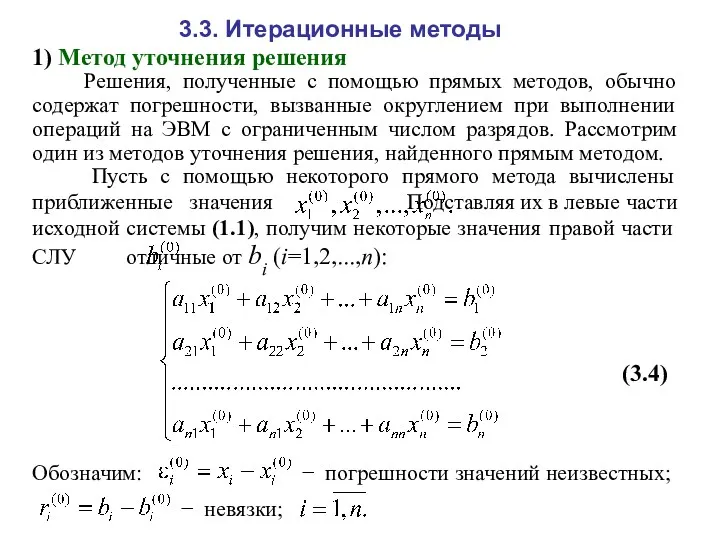
- 11. 3.3. Итерационные методы 1) Метод уточнения решения Решения, полученные с помощью прямых методов, обычно содержат погрешности,
- 13. Такой процесс уточнения решения представляет фактически итерационный метод решения СЛУ. При этом для нахождения очередного приближения
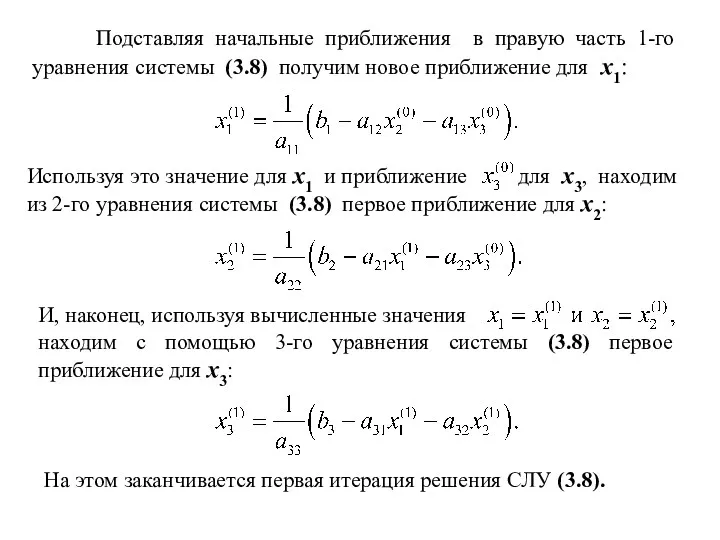
- 14. 2) Метод Гаусса – Зейделя Один из самых простых и распространенных итерационных методов, легко программируемых. Рассмотрим
- 16. Критерий окончания итерационного процесса: где E – заданная допустимая погрешность. Для сходимости итерационного процесса достаточно, чтобы
- 17. МЕТОД ПРОГОНКИ Если матрица системы является разреженной (ленточной в рассматриваемом ниже примере), то есть содержит большое
- 18. Для решения данной системы по формулам прямого и обратного хода (прогонки), с использование программного пакета, необходимо
- 19. . СР № 4. Прямые методы решения СЛАУ: метод Крамера, матричный метод, метод Гаусса Задание. 1.
- 20. 3. Методы решения систем линейных уравнений 3.1. Метод с использованием обратной матрицы В этом случае система
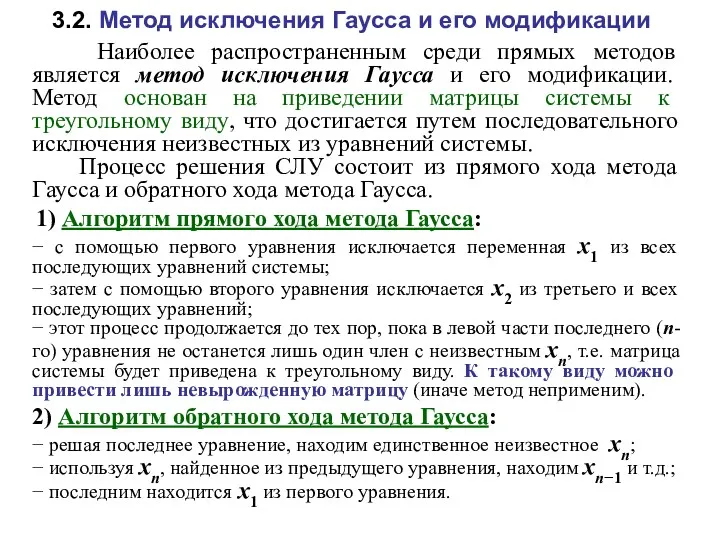
- 21. 3.2. Метод исключения Гаусса и его модификации Наиболее распространенным среди прямых методов является метод исключения Гаусса
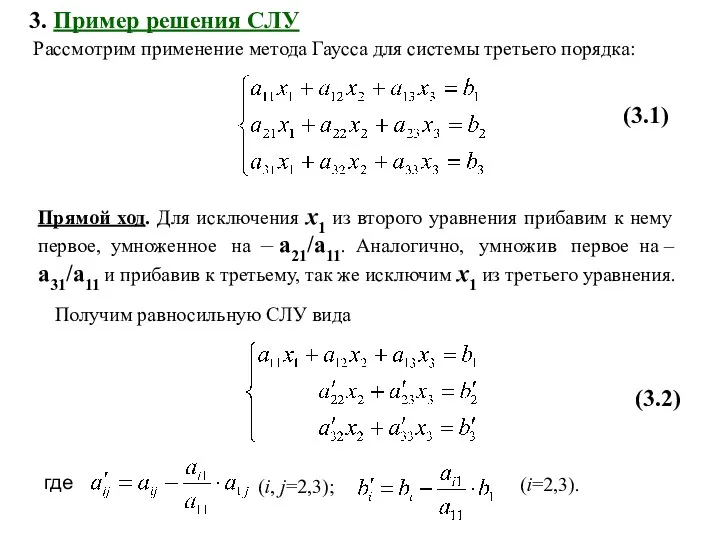
- 22. 3. Пример решения СЛУ (i, j=2,3); (3.1) Прямой ход. Для исключения x1 из второго уравнения прибавим
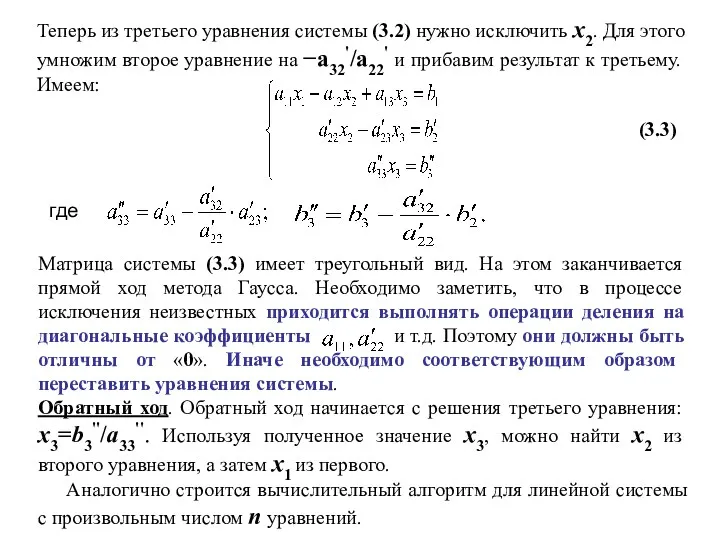
- 23. (3.3) где Матрица системы (3.3) имеет треугольный вид. На этом заканчивается прямой ход метода Гаусса. Необходимо
- 24. 4) Метод Гаусса с выбором главного элемента Одной из модификаций метода Гаусса является схема с выбором
- 25. Решите систему методом Крамера: Решение: Вычислим определитель системы: Так как определитель системы отличен от нуля, то
- 26. Решите систему методом Крамера: Находим неизвестные по формулам Крамера: Ответ:
- 27. Решите систему методом Гаусса: Решение: Первое уравнение оставим без изменения, а из 2-го и 3-го исключим
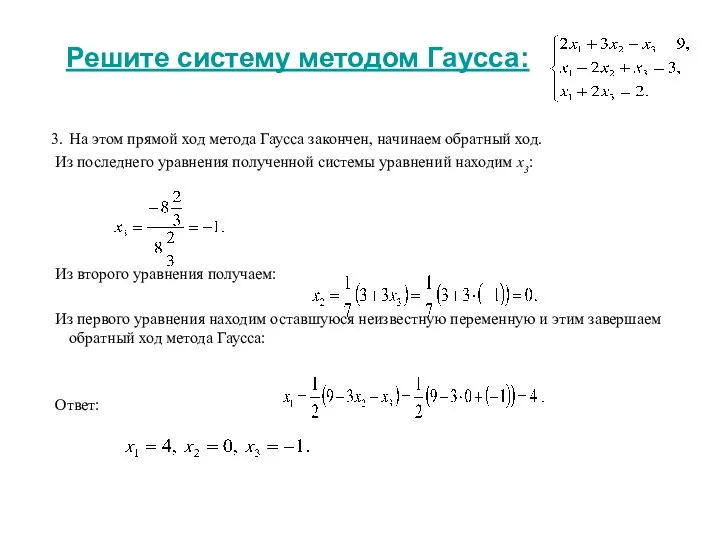
- 28. Решите систему методом Гаусса: На этом прямой ход метода Гаусса закончен, начинаем обратный ход. Из последнего
- 29. Решите систему матричным методом: Решение: Перепишем систему уравнений в матричной форме: Так как то систему трёх
- 30. Решите систему матричным методом: Построим обратную матрицу с помощью матрицы из алгебраических дополнений элементов матрицы :
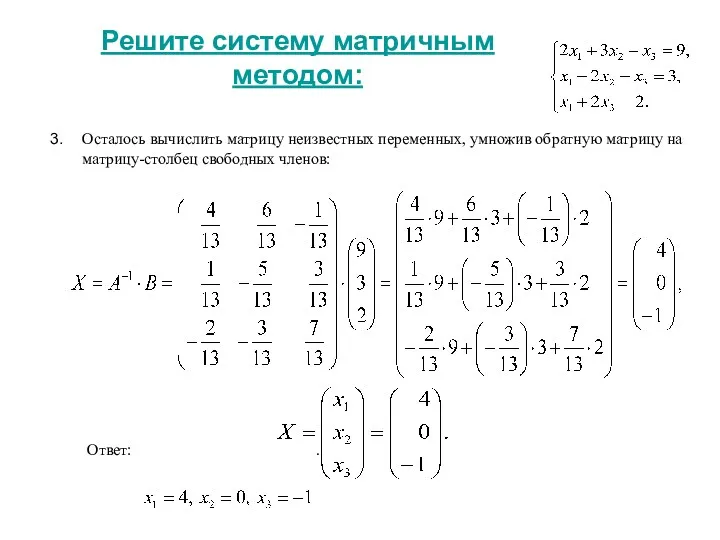
- 31. Решите систему матричным методом: Осталось вычислить матрицу неизвестных переменных, умножив обратную матрицу на матрицу-столбец свободных членов:
- 32. Пример решения СЛАУ методом Крамера Ответ: (1; 2; 2; 0)
- 33. Пример решения СЛАУ методом Гаусса Ответ: (1; 2; 2; 0)
- 35. Скачать презентацию

Определение. Примеры.
К решению систем линейных алгебраических уравнений сводятся многочисленные практические
Определение. Примеры.
К решению систем линейных алгебраических уравнений сводятся многочисленные практические
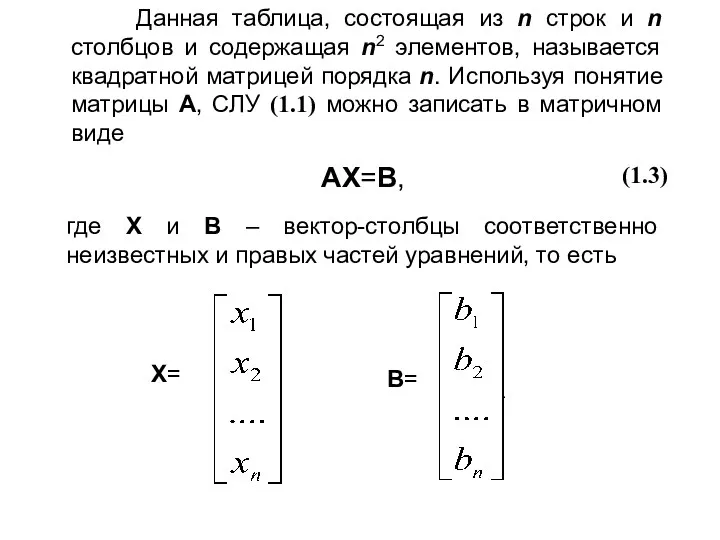
Данная таблица, состоящая из n строк и n столбцов и
Данная таблица, состоящая из n строк и n столбцов и

Определителем (детерминантом) матрицы А n-го порядка называется число D (иногда
Определителем (детерминантом) матрицы А n-го порядка называется число D (иногда
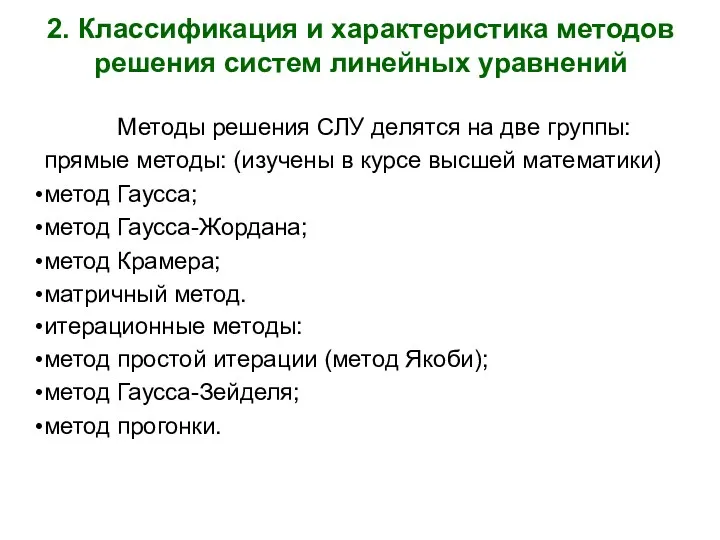
2. Классификация и характеристика методов решения систем линейных уравнений
Методы решения
2. Классификация и характеристика методов решения систем линейных уравнений
Методы решения

Прямые методы решения СЛУ
Прямые методы используют конечные соотношения (формулы) для
Прямые методы решения СЛУ
Прямые методы используют конечные соотношения (формулы) для
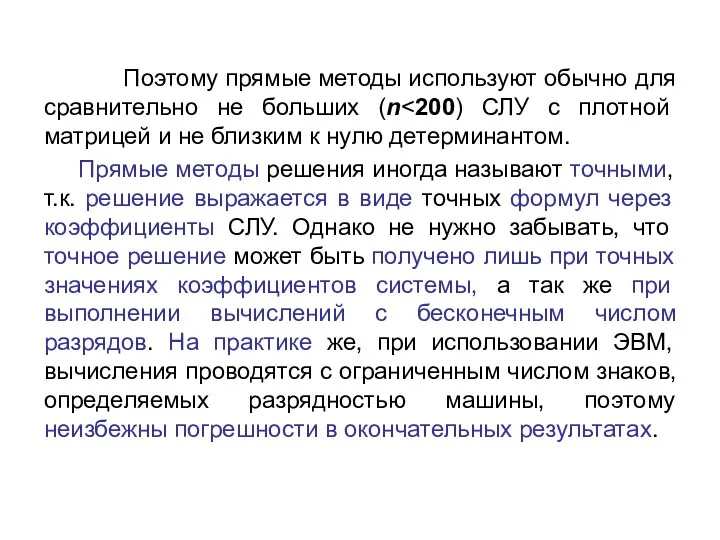
Поэтому прямые методы используют обычно для сравнительно не больших (n<200)
Поэтому прямые методы используют обычно для сравнительно не больших (n<200)
2) Итерационные методы решения СЛУ
Итерационными методами являются методы последовательных приближений. В
2) Итерационные методы решения СЛУ
Итерационными методами являются методы последовательных приближений. В
Достоинства итерационных методов:
требуют хранения в памяти ЭВМ не всей матрицы системы,
Достоинства итерационных методов:
требуют хранения в памяти ЭВМ не всей матрицы системы,
3.3. Итерационные методы
1) Метод уточнения решения
Решения, полученные с помощью
3.3. Итерационные методы
1) Метод уточнения решения
Решения, полученные с помощью

Такой процесс уточнения решения представляет фактически итерационный метод решения СЛУ.
Такой процесс уточнения решения представляет фактически итерационный метод решения СЛУ.

2) Метод Гаусса – Зейделя
Один из самых простых и
2) Метод Гаусса – Зейделя
Один из самых простых и
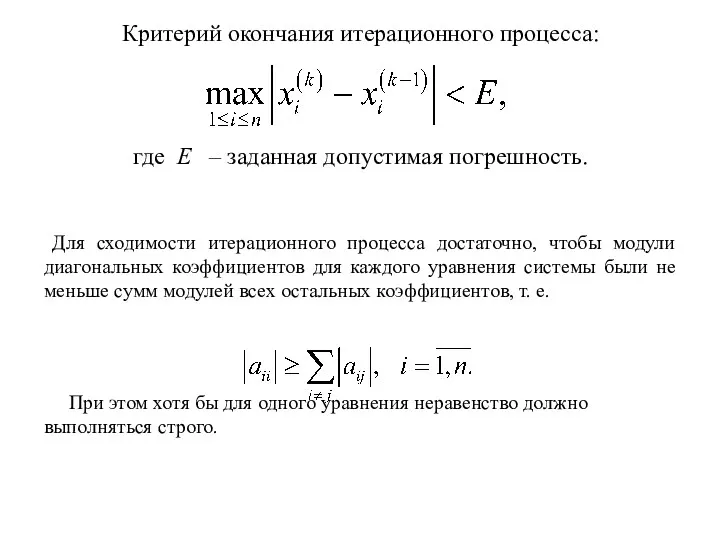
Критерий окончания итерационного процесса:
где E – заданная допустимая погрешность.
Для сходимости итерационного
Критерий окончания итерационного процесса:
где E – заданная допустимая погрешность.
Для сходимости итерационного
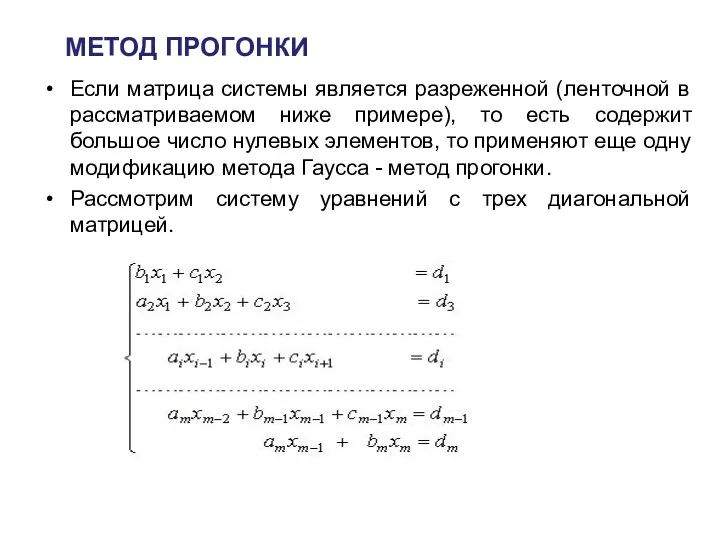
МЕТОД ПРОГОНКИ
Если матрица системы является разреженной (ленточной в рассматриваемом ниже примере),
МЕТОД ПРОГОНКИ
Если матрица системы является разреженной (ленточной в рассматриваемом ниже примере),
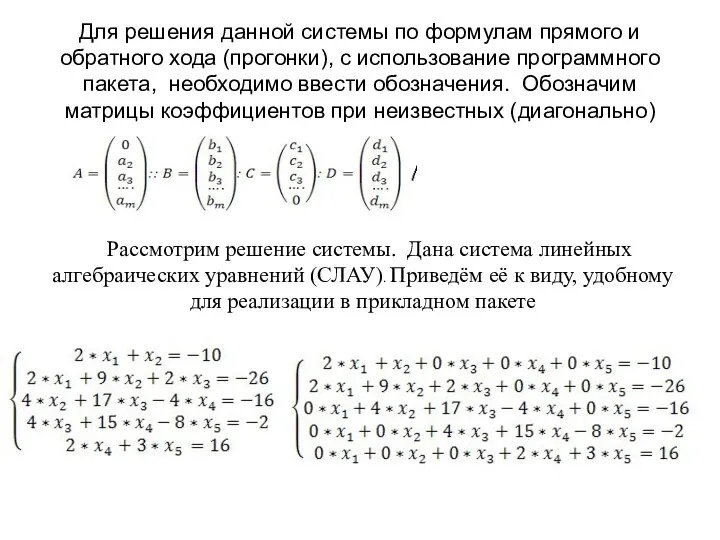
Для решения данной системы по формулам прямого и обратного хода (прогонки),
Для решения данной системы по формулам прямого и обратного хода (прогонки),
. СР № 4. Прямые методы решения СЛАУ: метод Крамера, матричный
. СР № 4. Прямые методы решения СЛАУ: метод Крамера, матричный
3. Методы решения систем линейных уравнений
3.1. Метод с использованием обратной матрицы
3. Методы решения систем линейных уравнений
3.1. Метод с использованием обратной матрицы
3.2. Метод исключения Гаусса и его модификации
Наиболее распространенным среди прямых
3.2. Метод исключения Гаусса и его модификации
Наиболее распространенным среди прямых
3. Пример решения СЛУ
(i, j=2,3);
(3.1)
Прямой ход. Для исключения x1 из
3. Пример решения СЛУ
(i, j=2,3);
(3.1)
Прямой ход. Для исключения x1 из
(3.3)
где
Матрица системы (3.3) имеет треугольный вид. На этом заканчивается
(3.3)
где
Матрица системы (3.3) имеет треугольный вид. На этом заканчивается
4) Метод Гаусса с выбором главного элемента
Одной из модификаций метода
4) Метод Гаусса с выбором главного элемента
Одной из модификаций метода
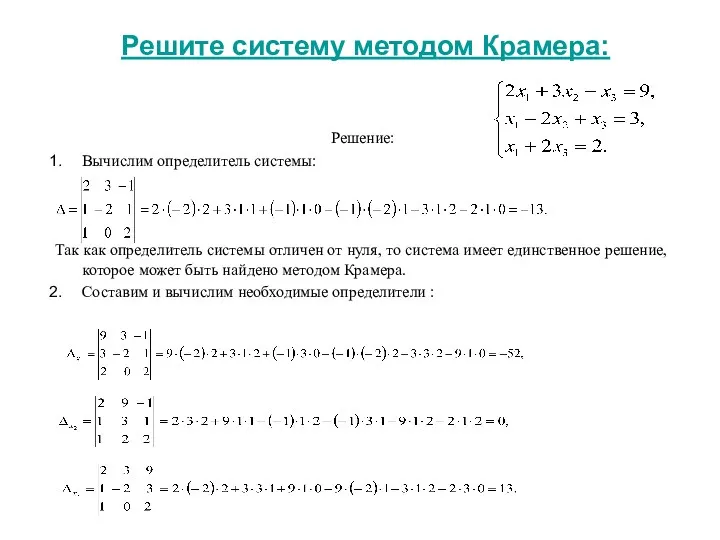
Решите систему методом Крамера:
Решение:
Вычислим определитель системы:
Так как определитель системы отличен от
Решите систему методом Крамера:
Решение:
Вычислим определитель системы:
Так как определитель системы отличен от

Решите систему методом Крамера:
Находим неизвестные по формулам Крамера:
Ответ:
Решите систему методом Крамера:
Находим неизвестные по формулам Крамера:
Ответ:
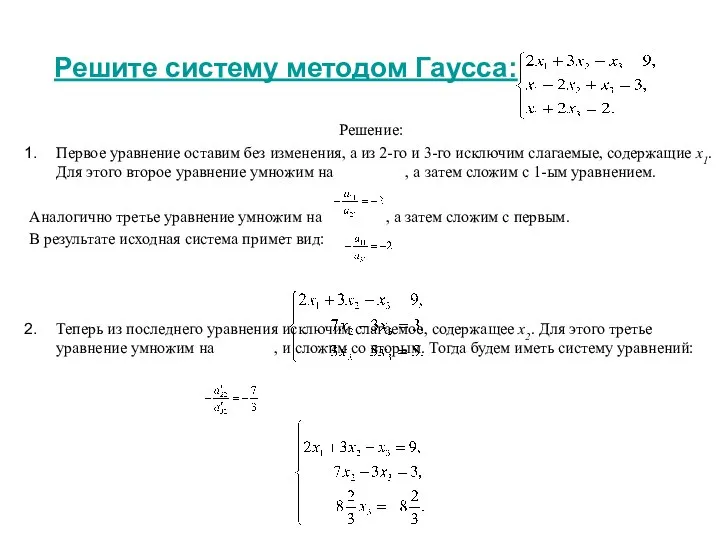
Решите систему методом Гаусса:
Решение:
Первое уравнение оставим без изменения, а из 2-го
Решите систему методом Гаусса:
Решение:
Первое уравнение оставим без изменения, а из 2-го
Решите систему методом Гаусса:
На этом прямой ход метода Гаусса закончен, начинаем
Решите систему методом Гаусса:
На этом прямой ход метода Гаусса закончен, начинаем

Решите систему матричным методом:
Решение:
Перепишем систему уравнений в матричной форме:
Так как
то
Решите систему матричным методом:
Решение:
Перепишем систему уравнений в матричной форме:
Так как
то

Решите систему матричным методом:
Построим обратную матрицу с помощью матрицы из алгебраических
Решите систему матричным методом:
Построим обратную матрицу с помощью матрицы из алгебраических
Решите систему матричным методом:
Осталось вычислить матрицу неизвестных переменных, умножив обратную матрицу
Решите систему матричным методом:
Осталось вычислить матрицу неизвестных переменных, умножив обратную матрицу
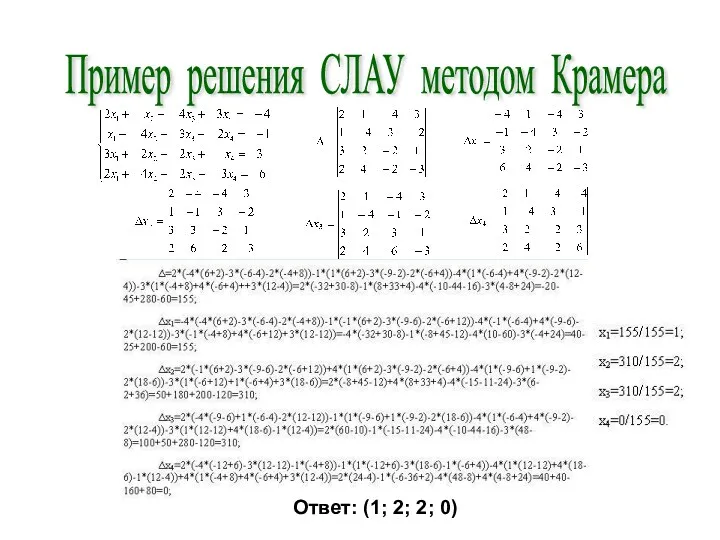
Пример решения СЛАУ методом Крамера
Ответ: (1; 2; 2; 0)
Пример решения СЛАУ методом Крамера
Ответ: (1; 2; 2; 0)

Пример решения СЛАУ методом Гаусса
Ответ: (1; 2; 2; 0)
Пример решения СЛАУ методом Гаусса
Ответ: (1; 2; 2; 0)
 Обработка результатов эксперимента. Матричное исчисление
Обработка результатов эксперимента. Матричное исчисление Решение иррациональных уравнений
Решение иррациональных уравнений Решение задач на применение аксиом стереометрии и их следствий
Решение задач на применение аксиом стереометрии и их следствий Повторение. Алгебра 9 класс (урок 4)
Повторение. Алгебра 9 класс (урок 4) Изображение пространственных фигур на плоскости
Изображение пространственных фигур на плоскости Графический диктант. Математика. 5 класс
Графический диктант. Математика. 5 класс Примеры
Примеры Чи такі вони прості ці прості числа?
Чи такі вони прості ці прості числа?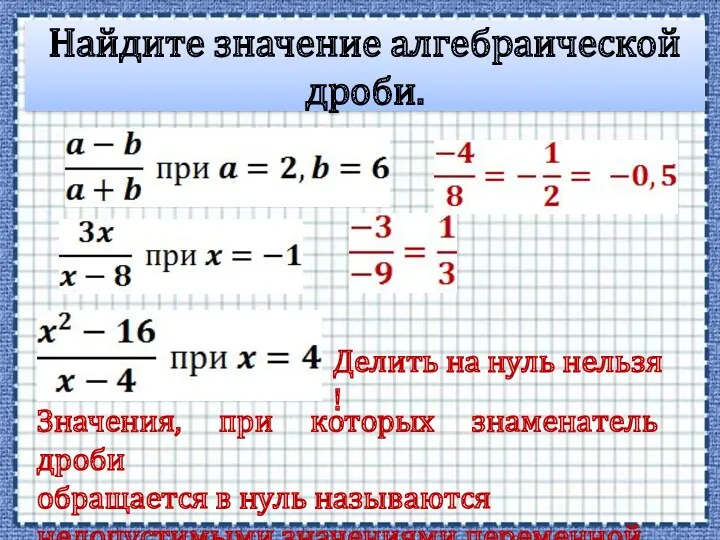 Значения алгебраической дроби. Совместные действия над алгебраическими дробями
Значения алгебраической дроби. Совместные действия над алгебраическими дробями Презентация к уроку математики во 2классе.
Презентация к уроку математики во 2классе. Модели управления запасами
Модели управления запасами Компетентностный подход в обучении математики
Компетентностный подход в обучении математики Касательная. Уравнение касательной
Касательная. Уравнение касательной Измерение углов
Измерение углов Понятие вероятности. Случайные исходы, события, испытания
Понятие вероятности. Случайные исходы, события, испытания Умножение десятичных дробей
Умножение десятичных дробей Финансовая математика в задачах ЕГЭ и практической деятельности человека
Финансовая математика в задачах ЕГЭ и практической деятельности человека Приемы письменных вычислений
Приемы письменных вычислений Сложение и вычитание смешанных дробей. Урок математики в 5 классе
Сложение и вычитание смешанных дробей. Урок математики в 5 классе Неравенства второй степени с одной переменной
Неравенства второй степени с одной переменной Пропорции
Пропорции Графики и диаграммы. ЕГЭ-2012. Решение задач В2
Графики и диаграммы. ЕГЭ-2012. Решение задач В2 Расстояние между параллельными прямыми
Расстояние между параллельными прямыми Знаки +, –,=
Знаки +, –,= Презентации по математике
Презентации по математике Задача о Кёнигсбергских мостах, эйлеровы пути и эйлеровы графы
Задача о Кёнигсбергских мостах, эйлеровы пути и эйлеровы графы Построение сечений тетраэдра и параллелепипеда. Часть 2
Построение сечений тетраэдра и параллелепипеда. Часть 2 Урок математики. 1 класс. Число пять, цифра 5
Урок математики. 1 класс. Число пять, цифра 5