- Основы теории управления

Содержание
- 2. Основы теории автоматического управления Теория управления - наука, которая изучает процессы управления, методы их исследования и
- 3. Классификация САУ (САР) Все системы автоматического управления и регулирования делятся на следующие основные классы: 1 .По
- 4. Основные понятия ТАУ Объект управления (объект регулирования, ОУ) – устройство, требуемый режим работы которого должен поддерживаться
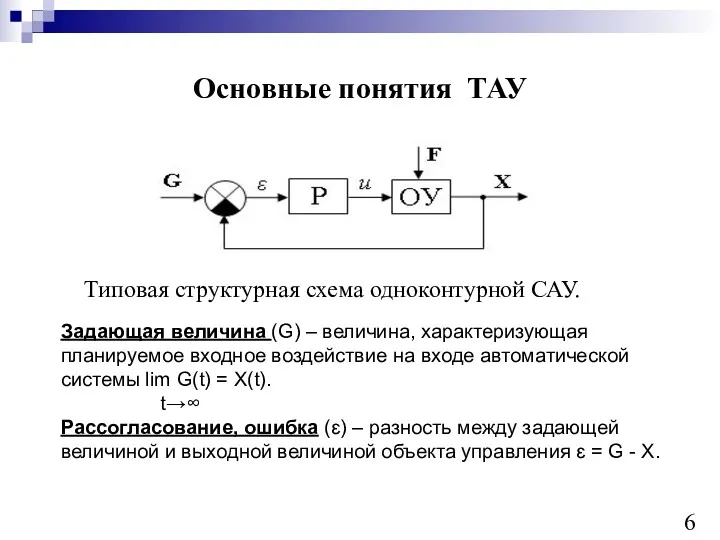
- 5. Основные понятия ТАУ Типовая структурная схема одноконтурной САУ. 6 Задающая величина (G) – величина, характеризующая планируемое
- 6. Основные понятия ТАУ УУ – управляющее устройство (регулятор) – устройство, осуществляющее воздействие на объект управления с
- 7. Основные понятия ТАУ САУ – система автоматического управления, это система с замкнутой цепью воздействия, в котором
- 8. Классификация САУ 1. По назначению (по характеру изменения задания): - стабилизирующая САУ, это система, алгоритм функционирования
- 9. 2. По количеству контуров: - одноконтурные - содержащие один контур, - многоконтурные - содержащие несколько контуров.
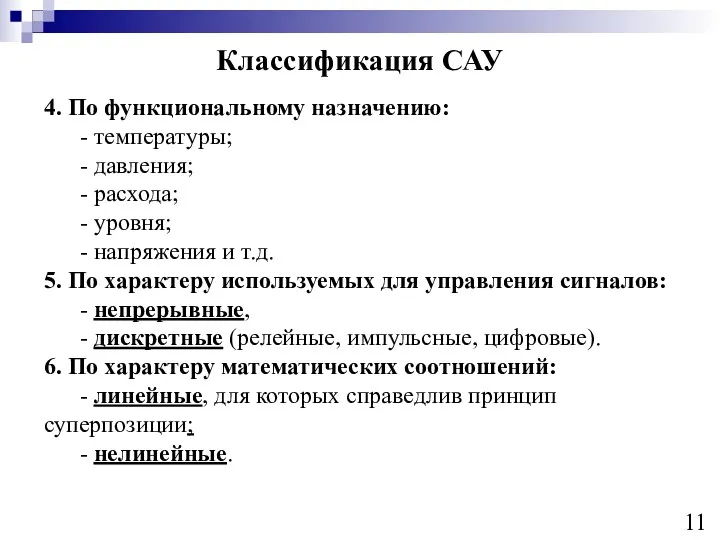
- 10. Классификация САУ 4. По функциональному назначению: - температуры; - давления; - расхода; - уровня; - напряжения
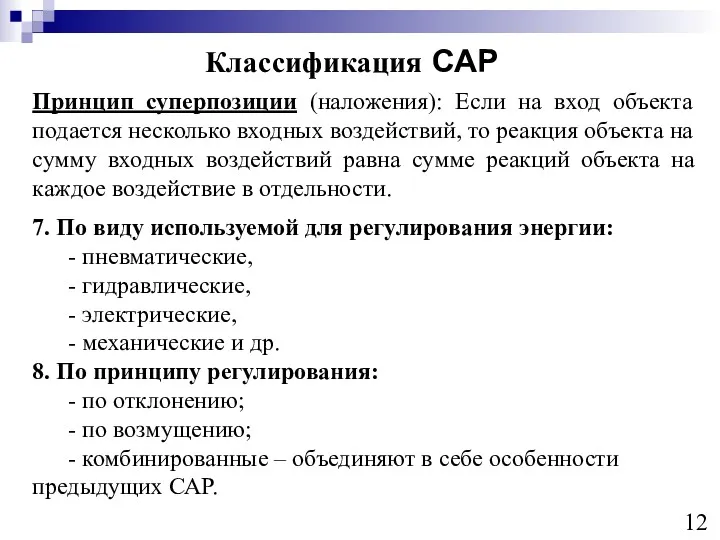
- 11. Классификация САР Принцип суперпозиции (наложения): Если на вход объекта подается несколько входных воздействий, то реакция объекта
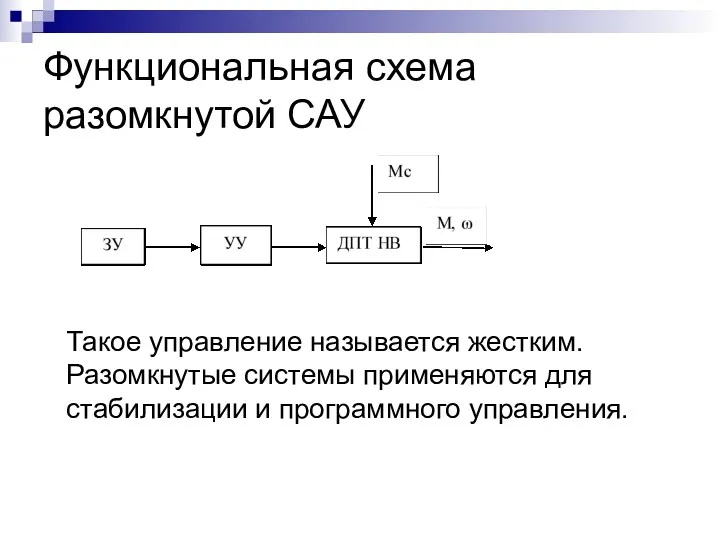
- 12. Функциональная схема разомкнутой САУ Такое управление называется жестким. Разомкнутые системы применяются для стабилизации и программного управления.
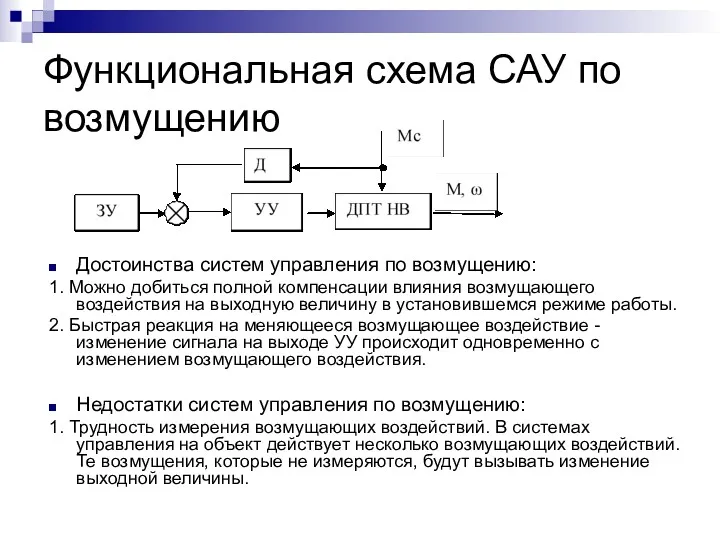
- 13. Функциональная схема САУ по возмущению Достоинства систем управления по возмущению: 1. Можно добиться полной компенсации влияния
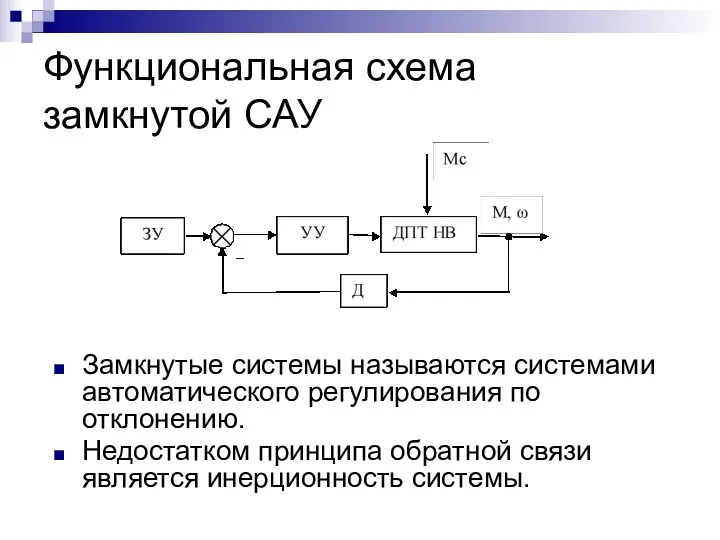
- 14. Функциональная схема замкнутой САУ Замкнутые системы называются системами автоматического регулирования по отклонению. Недостатком принципа обратной связи
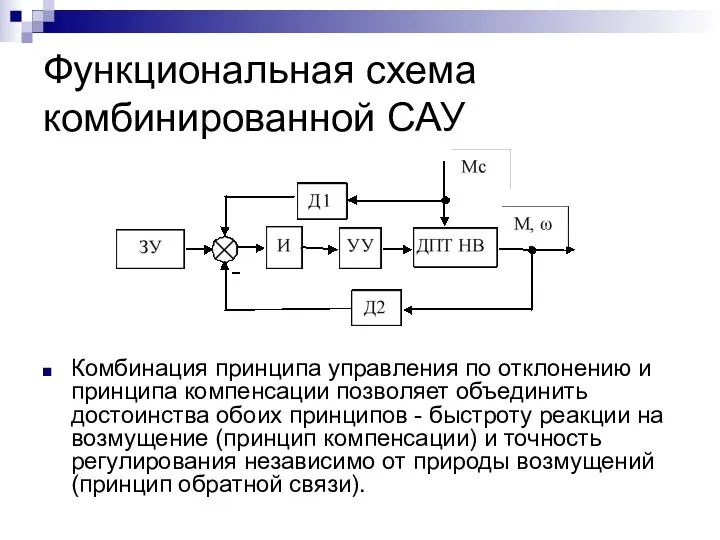
- 15. Функциональная схема комбинированной САУ Комбинация принципа управления по отклонению и принципа компенсации позволяет объединить достоинства обоих
- 16. МАТЕМАТИЧЕСКАЯ МОДЕЛЬ ОБЪЕКТА УПРАВЛЕНИЯ Математической моделью динамической системы принято называть совокупность аналитических выражений и алгоритмов, однозначно
- 17. МАТЕМАТИЧЕСКАЯ МОДЕЛЬ ОБЪЕКТА УПРАВЛЕНИЯ К временным относятся модели, в которых аргументом является время (непрерывное или дискретное).
- 18. Преобразования Лапласа Линейные дифференциальные уравнения динамических систем решаются методами, которые рассматриваемы в курсах высшей математики. Для
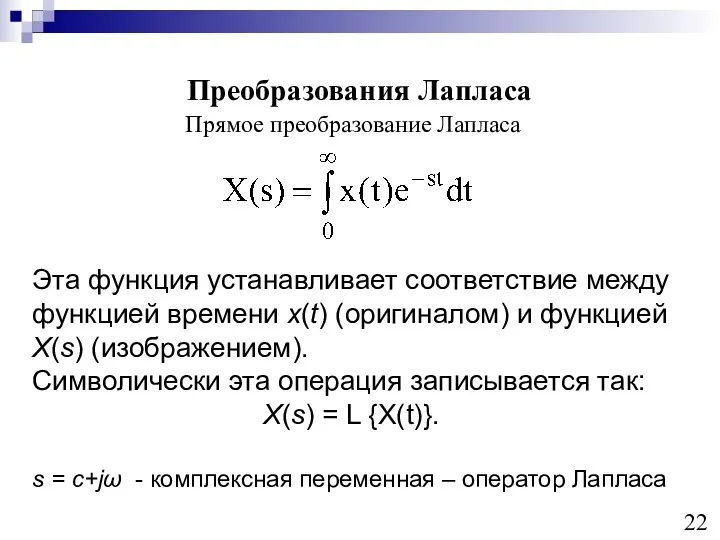
- 19. Преобразования Лапласа Эта функция устанавливает соответствие между функцией времени х(t) (оригиналом) и функцией Х(s) (изображением). Символически
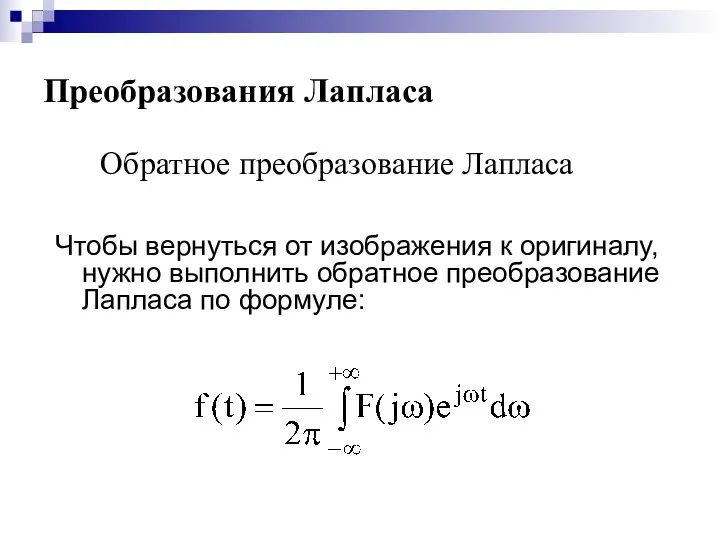
- 20. Преобразования Лапласа Чтобы вернуться от изображения к оригиналу, нужно выполнить обратное преобразование Лапласа по формуле: Обратное
- 21. Наиболее важными свойствами преобразования Лапласа при нулевых начальных условиях являются следующие: L { f′(t) } =
- 22. Единичная ступенчатая функция 1(t) – функция Хевисайда Для автоматических систем функция 1(t) является распространенным видом входного
- 23. Дельта-функция Дирака
- 25. Применение преобразования Лапласа при анализе САУ Операционный метод в ТАУ получил широкое распространение, так как с
- 26. Применение преобразования Лапласа при анализе САУ
- 27. Применение преобразования Лапласа при анализе САУ
- 28. Применение преобразования Лапласа при анализе САУ Дифференциальный оператор W(s) называют передаточной функцией. Она определяет отношение выходной
- 29. Применение преобразования Лапласа при анализе САУ Знаменатель передаточной функции D(s) называют характеристическим полиномом (уравнением). Его корни,
- 30. Таблица преобразований Лапласа
- 31. Таблица преобразований Лапласа
- 33. Скачать презентацию
Основы теории автоматического управления
Теория управления - наука, которая изучает процессы управления, методы их
Основы теории автоматического управления
Теория управления - наука, которая изучает процессы управления, методы их
Классификация САУ (САР)
Все системы автоматического управления и регулирования делятся на следующие основные классы:
1
Классификация САУ (САР)
Все системы автоматического управления и регулирования делятся на следующие основные классы:
1
Основные понятия ТАУ
Объект управления (объект регулирования, ОУ) – устройство, требуемый режим работы которого
Основные понятия ТАУ
Объект управления (объект регулирования, ОУ) – устройство, требуемый режим работы которого
Основные понятия ТАУ
Типовая структурная схема одноконтурной САУ.
6
Задающая величина (G) – величина, характеризующая
Основные понятия ТАУ
Типовая структурная схема одноконтурной САУ.
6
Задающая величина (G) – величина, характеризующая
Основные понятия ТАУ
УУ – управляющее устройство (регулятор) – устройство, осуществляющее воздействие на объект
Основные понятия ТАУ
УУ – управляющее устройство (регулятор) – устройство, осуществляющее воздействие на объект
Основные понятия ТАУ
САУ – система автоматического управления, это система с замкнутой цепью воздействия,
Основные понятия ТАУ
САУ – система автоматического управления, это система с замкнутой цепью воздействия,
Классификация САУ
1. По назначению (по характеру изменения задания):
- стабилизирующая САУ, это система,
Классификация САУ
1. По назначению (по характеру изменения задания):
- стабилизирующая САУ, это система,
2. По количеству контуров:
- одноконтурные - содержащие один контур,
- многоконтурные - содержащие несколько
2. По количеству контуров:
- одноконтурные - содержащие один контур,
- многоконтурные - содержащие несколько
Классификация САУ
4. По функциональному назначению:
- температуры;
- давления;
- расхода;
- уровня;
- напряжения и т.д.
5. По
Классификация САУ
4. По функциональному назначению:
- температуры;
- давления;
- расхода;
- уровня;
- напряжения и т.д.
5. По
Классификация САР
Принцип суперпозиции (наложения): Если на вход объекта подается несколько входных воздействий, то
Классификация САР
Принцип суперпозиции (наложения): Если на вход объекта подается несколько входных воздействий, то
Функциональная схема разомкнутой САУ
Такое управление называется жестким. Разомкнутые системы применяются для стабилизации и
Функциональная схема разомкнутой САУ
Такое управление называется жестким. Разомкнутые системы применяются для стабилизации и
Функциональная схема САУ по возмущению
Достоинства систем управления по возмущению:
1. Можно добиться полной компенсации
Функциональная схема САУ по возмущению
Достоинства систем управления по возмущению:
1. Можно добиться полной компенсации
Функциональная схема замкнутой САУ
Замкнутые системы называются системами автоматического регулирования по отклонению.
Недостатком принципа
Функциональная схема замкнутой САУ
Замкнутые системы называются системами автоматического регулирования по отклонению.
Недостатком принципа
Функциональная схема комбинированной САУ
Комбинация принципа управления по отклонению и принципа компенсации позволяет объединить
Функциональная схема комбинированной САУ
Комбинация принципа управления по отклонению и принципа компенсации позволяет объединить
МАТЕМАТИЧЕСКАЯ МОДЕЛЬ ОБЪЕКТА УПРАВЛЕНИЯ
Математической моделью динамической системы принято называть совокупность аналитических выражений
МАТЕМАТИЧЕСКАЯ МОДЕЛЬ ОБЪЕКТА УПРАВЛЕНИЯ
Математической моделью динамической системы принято называть совокупность аналитических выражений
МАТЕМАТИЧЕСКАЯ МОДЕЛЬ ОБЪЕКТА УПРАВЛЕНИЯ
К временным относятся модели, в которых аргументом является время (непрерывное
МАТЕМАТИЧЕСКАЯ МОДЕЛЬ ОБЪЕКТА УПРАВЛЕНИЯ
К временным относятся модели, в которых аргументом является время (непрерывное
Преобразования Лапласа
Линейные дифференциальные уравнения динамических систем решаются методами, которые рассматриваемы в курсах высшей
Преобразования Лапласа
Линейные дифференциальные уравнения динамических систем решаются методами, которые рассматриваемы в курсах высшей
Преобразования Лапласа
Эта функция устанавливает соответствие между функцией времени х(t) (оригиналом) и функцией Х(s)
Преобразования Лапласа
Эта функция устанавливает соответствие между функцией времени х(t) (оригиналом) и функцией Х(s)
Преобразования Лапласа
Чтобы вернуться от изображения к оригиналу, нужно выполнить обратное преобразование Лапласа по
Преобразования Лапласа
Чтобы вернуться от изображения к оригиналу, нужно выполнить обратное преобразование Лапласа по
Наиболее важными свойствами преобразования Лапласа при нулевых начальных условиях являются следующие:
L { f′(t)
Наиболее важными свойствами преобразования Лапласа при нулевых начальных условиях являются следующие:
L { f′(t)
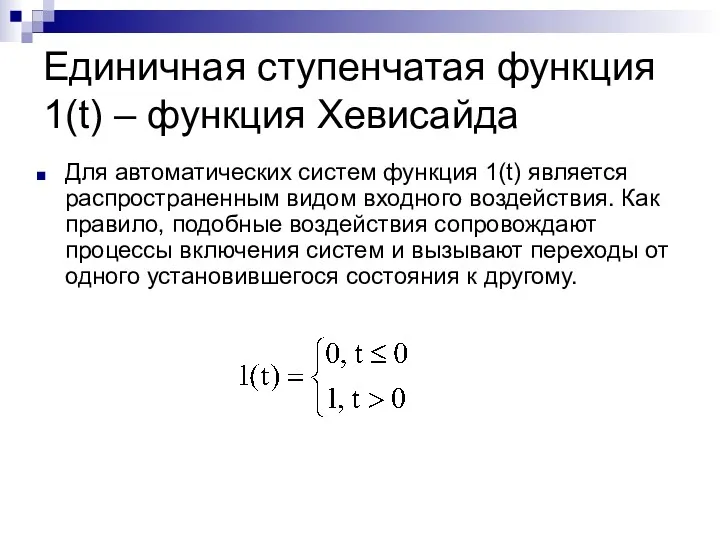
Единичная ступенчатая функция 1(t) – функция Хевисайда
Для автоматических систем функция 1(t) является распространенным
Единичная ступенчатая функция 1(t) – функция Хевисайда
Для автоматических систем функция 1(t) является распространенным
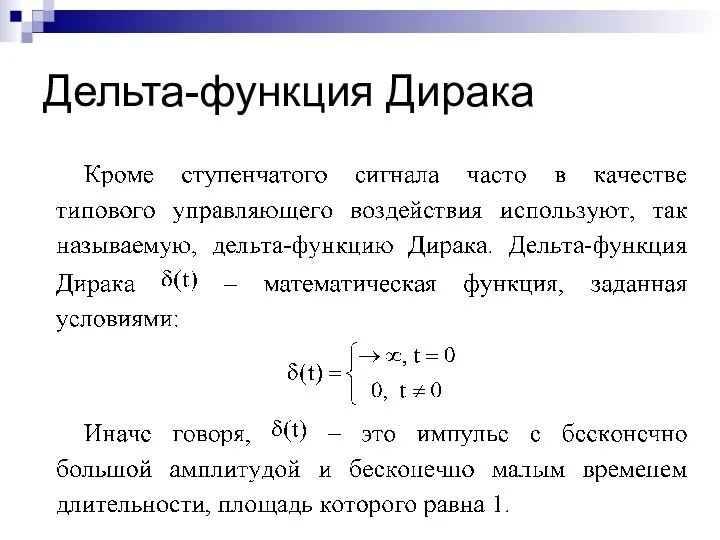
Дельта-функция Дирака
Дельта-функция Дирака
Применение преобразования Лапласа при анализе САУ
Операционный метод в ТАУ получил широкое распространение, так
Применение преобразования Лапласа при анализе САУ
Операционный метод в ТАУ получил широкое распространение, так
Применение преобразования Лапласа при анализе САУ
Применение преобразования Лапласа при анализе САУ
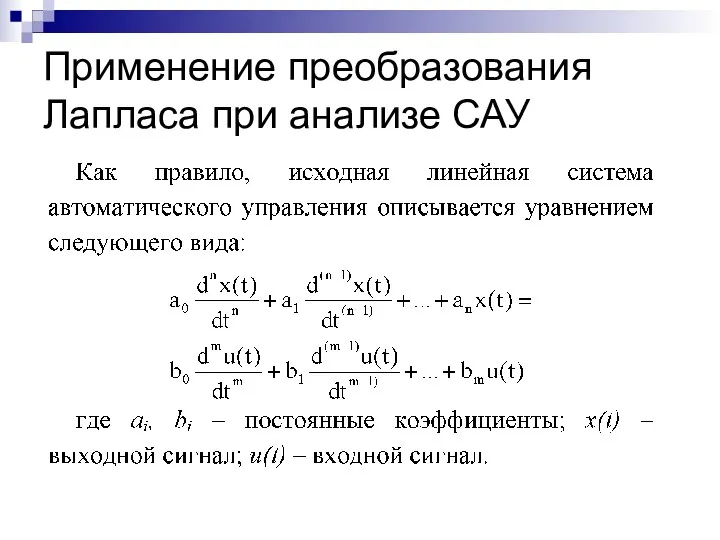
Применение преобразования Лапласа при анализе САУ
Применение преобразования Лапласа при анализе САУ
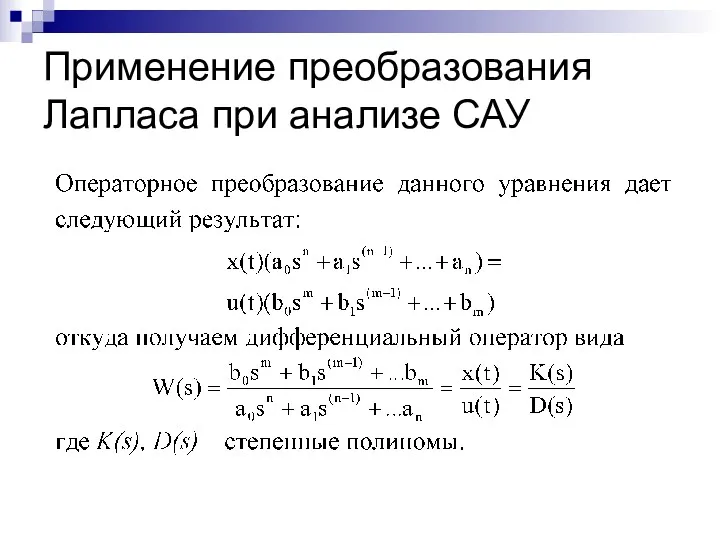
Применение преобразования Лапласа при анализе САУ
Дифференциальный оператор W(s) называют передаточной функцией. Она определяет
Применение преобразования Лапласа при анализе САУ
Дифференциальный оператор W(s) называют передаточной функцией. Она определяет
Применение преобразования Лапласа при анализе САУ
Знаменатель передаточной функции D(s) называют характеристическим полиномом (уравнением).
Применение преобразования Лапласа при анализе САУ
Знаменатель передаточной функции D(s) называют характеристическим полиномом (уравнением).
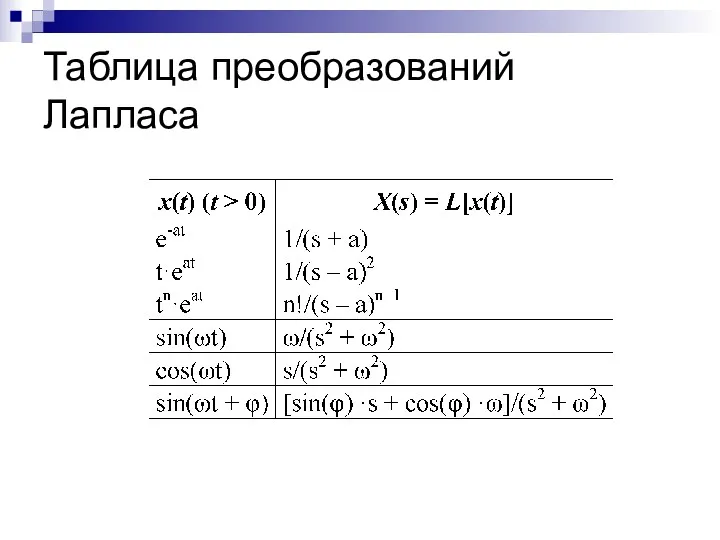
Таблица преобразований Лапласа
Таблица преобразований Лапласа
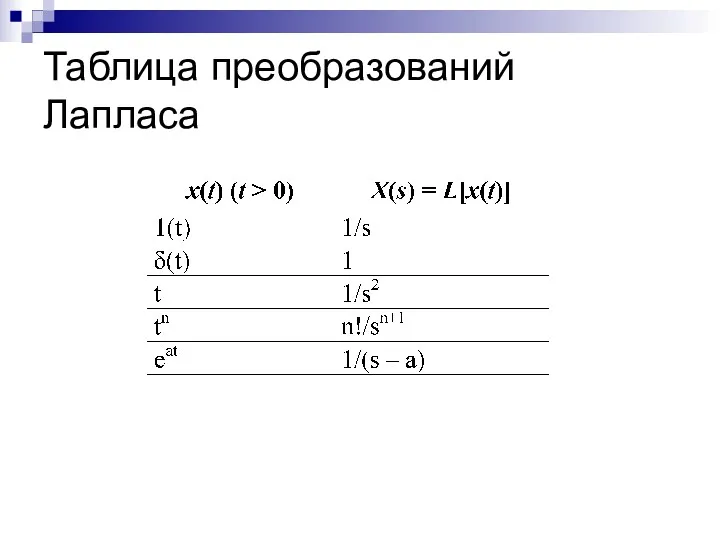
Таблица преобразований Лапласа
Таблица преобразований Лапласа
 Инвариант. Задачи на инварианты
Инвариант. Задачи на инварианты Соответствия и отношения
Соответствия и отношения Числа в загадках, пословицах и поговорках
Числа в загадках, пословицах и поговорках Презентация к уроку математики на тему Решение задач на нахождение время, скорости и расстояния
Презентация к уроку математики на тему Решение задач на нахождение время, скорости и расстояния Статистика национального богатства. Нефинансовые и финансовые активы
Статистика национального богатства. Нефинансовые и финансовые активы Ранг матрицы. Теорема кронеккера-Копелли
Ранг матрицы. Теорема кронеккера-Копелли Сущность применения некоторых методов математической статистики при проведении педагогических исследований
Сущность применения некоторых методов математической статистики при проведении педагогических исследований Классическая теория вероятности. 6 и 11 класс
Классическая теория вероятности. 6 и 11 класс Вспоминаем пройденное урок 55
Вспоминаем пройденное урок 55 Правильные и неправильные дроби. 5 класс
Правильные и неправильные дроби. 5 класс Числовые ряды
Числовые ряды Подготовка к ВПР. Математика 3 задание. Арифметический метод
Подготовка к ВПР. Математика 3 задание. Арифметический метод Округление натуральных чисел
Округление натуральных чисел Презентация Устный счёт математика 1 класс
Презентация Устный счёт математика 1 класс ЕГЭ профиль: задание 9. Графики и функции
ЕГЭ профиль: задание 9. Графики и функции Ортогональное проектирование. Перпендикуляр и наклонная. Угол между прямой и плоскостью
Ортогональное проектирование. Перпендикуляр и наклонная. Угол между прямой и плоскостью Пропорция. Урок математики в 6 классе
Пропорция. Урок математики в 6 классе Множества
Множества Понятие арифметического квадратного корня
Понятие арифметического квадратного корня Десятичная запись числа. Сравнение десятичных дробей. Интерактивный тест. 5 класс
Десятичная запись числа. Сравнение десятичных дробей. Интерактивный тест. 5 класс Метод подстановки. 7 класс
Метод подстановки. 7 класс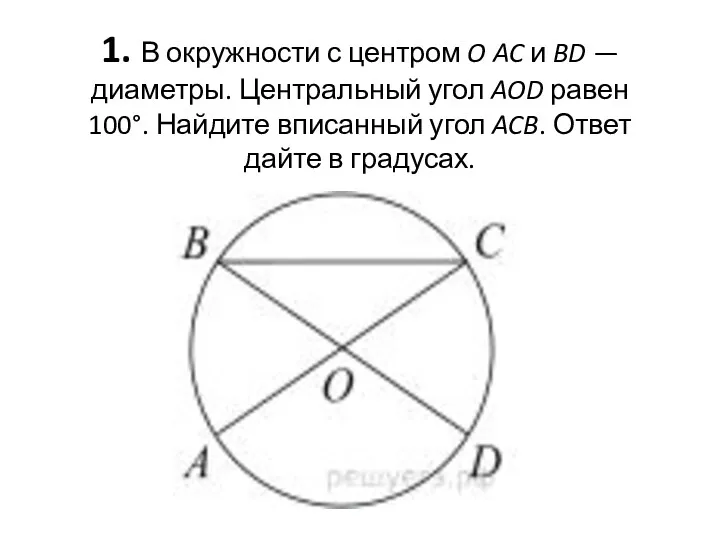 Окружности с центром O
Окружности с центром O Числовые гиганты и числовые лилипуты
Числовые гиганты и числовые лилипуты Стандартный вид числа
Стандартный вид числа Прямоугольные треугольники и их свойства
Прямоугольные треугольники и их свойства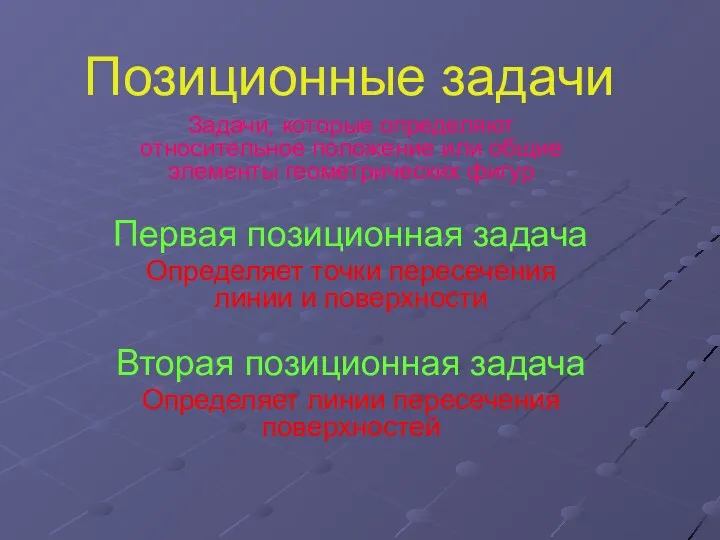 Позиционные задачи
Позиционные задачи Координатная плоскость. 6 класс
Координатная плоскость. 6 класс Математика и оборона нашей страны
Математика и оборона нашей страны