- Строительная механика. Статически неопределимые системы

Содержание
- 2. РАСЧЁТ СТАТИЧЕСКИ НЕОПРЕДЕЛИМЫХ СИСТЕМ СМЕШАННЫМ МЕТОДОМ Смешанный метод – метод расчёта деформируемых систем, в котором за
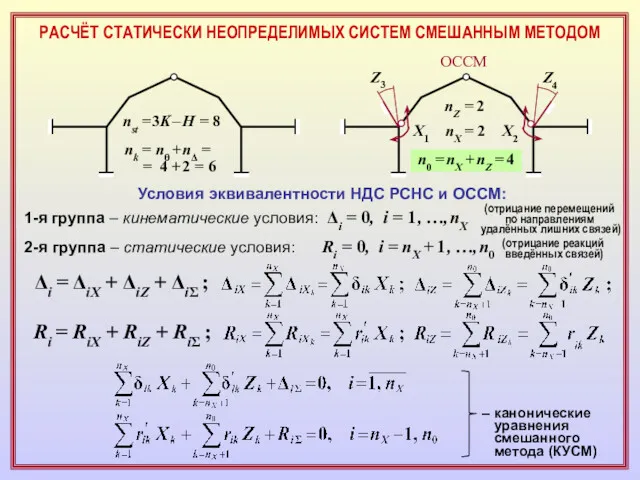
- 3. РАСЧЁТ СТАТИЧЕСКИ НЕОПРЕДЕЛИМЫХ СИСТЕМ СМЕШАННЫМ МЕТОДОМ nst = 3K – H = 8 nk = nθ
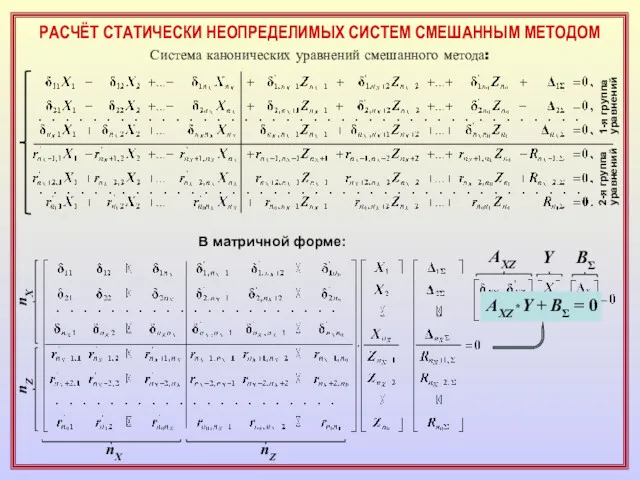
- 4. РАСЧЁТ СТАТИЧЕСКИ НЕОПРЕДЕЛИМЫХ СИСТЕМ СМЕШАННЫМ МЕТОДОМ Система канонических уравнений смешанного метода: 1-я группа уравнений 2-я группа
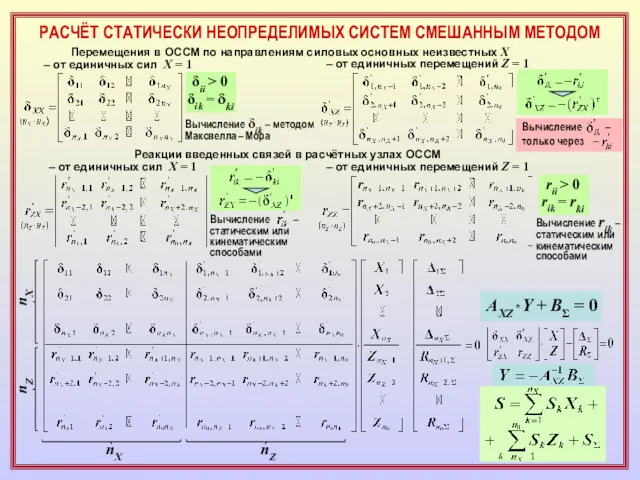
- 5. РАСЧЁТ СТАТИЧЕСКИ НЕОПРЕДЕЛИМЫХ СИСТЕМ СМЕШАННЫМ МЕТОДОМ nX nX nZ nZ Перемещения в ОССМ по направлениям силовых
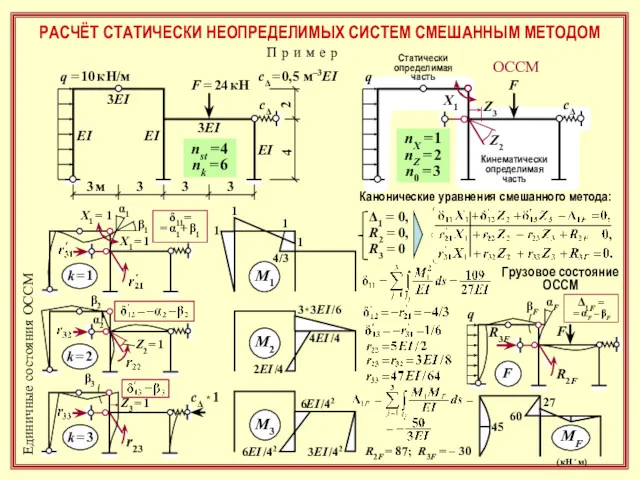
- 6. РАСЧЁТ СТАТИЧЕСКИ НЕОПРЕДЕЛИМЫХ СИСТЕМ СМЕШАННЫМ МЕТОДОМ П р и м е р EI EI EI 3EI
- 7. РАСЧЁТ СТАТИЧЕСКИ НЕОПРЕДЕЛИМЫХ СИСТЕМ СМЕШАННЫМ МЕТОДОМ П р и м е р EI EI EI 3EI
- 8. РАСЧЁТ СТАТИЧЕСКИ НЕОПРЕДЕЛИМЫХ СИСТЕМ СМЕШАННЫМ МЕТОДОМ П р и м е р q F cΔ X1
- 9. РАСЧЁТ СТАТИЧЕСКИ НЕОПРЕДЕЛИМЫХ СИСТЕМ СМЕШАННЫМ МЕТОДОМ П р и м е р q F cΔ X1
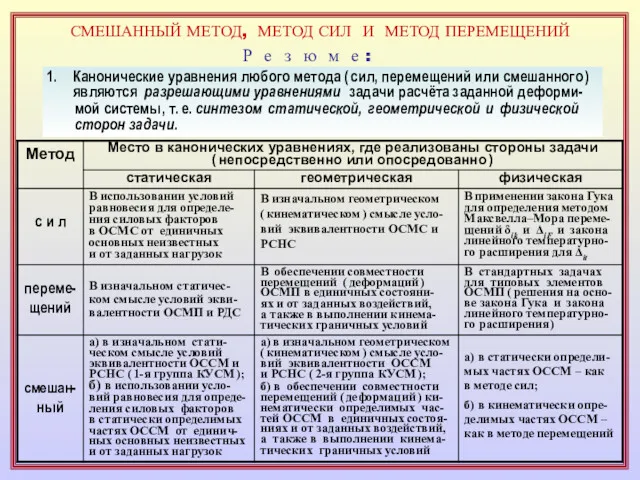
- 10. СМЕШАННЫЙ МЕТОД, МЕТОД СИЛ И МЕТОД ПЕРЕМЕЩЕНИЙ . . . . . . . . .
- 11. СМЕШАННЫЙ МЕТОД, МЕТОД СИЛ И МЕТОД ПЕРЕМЕЩЕНИЙ . . . . . . . . .
- 12. СМЕШАННЫЙ МЕТОД, МЕТОД СИЛ И МЕТОД ПЕРЕМЕЩЕНИЙ Р е з ю м е : Канонические уравнения
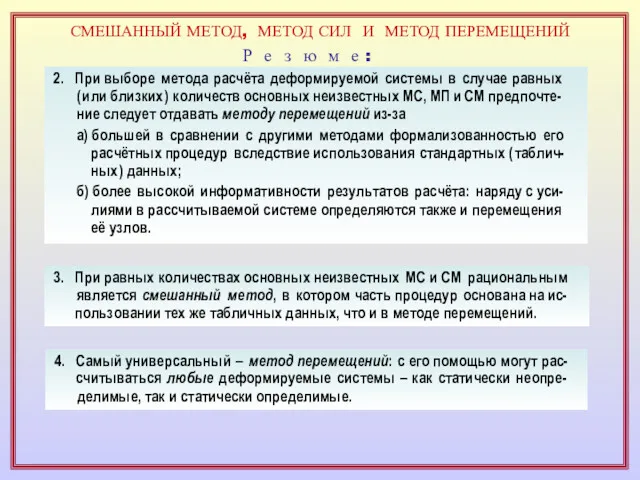
- 13. СМЕШАННЫЙ МЕТОД, МЕТОД СИЛ И МЕТОД ПЕРЕМЕЩЕНИЙ Р е з ю м е : 2. При
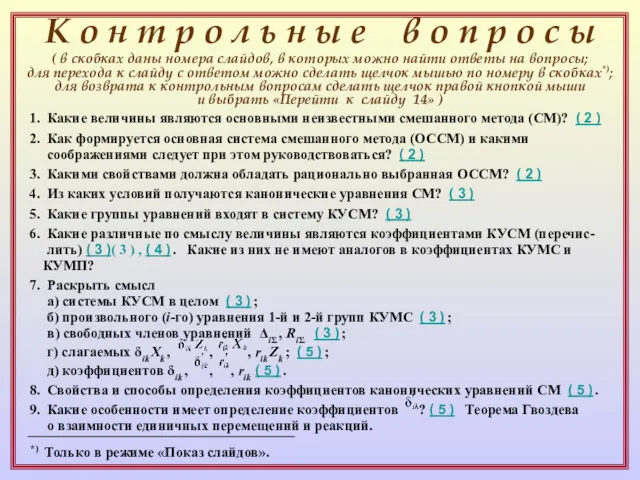
- 14. К о н т р о л ь н ы е в о п р о
- 16. Скачать презентацию

РАСЧЁТ СТАТИЧЕСКИ НЕОПРЕДЕЛИМЫХ СИСТЕМ СМЕШАННЫМ МЕТОДОМ
Смешанный метод – метод расчёта деформируемых
РАСЧЁТ СТАТИЧЕСКИ НЕОПРЕДЕЛИМЫХ СИСТЕМ СМЕШАННЫМ МЕТОДОМ
Смешанный метод – метод расчёта деформируемых
РАСЧЁТ СТАТИЧЕСКИ НЕОПРЕДЕЛИМЫХ СИСТЕМ СМЕШАННЫМ МЕТОДОМ
nst = 3K – H =
РАСЧЁТ СТАТИЧЕСКИ НЕОПРЕДЕЛИМЫХ СИСТЕМ СМЕШАННЫМ МЕТОДОМ
nst = 3K – H =
РАСЧЁТ СТАТИЧЕСКИ НЕОПРЕДЕЛИМЫХ СИСТЕМ СМЕШАННЫМ МЕТОДОМ
Система канонических уравнений смешанного метода:
1-я группа
уравнений
2-я
РАСЧЁТ СТАТИЧЕСКИ НЕОПРЕДЕЛИМЫХ СИСТЕМ СМЕШАННЫМ МЕТОДОМ
Система канонических уравнений смешанного метода:
1-я группа
уравнений
2-я
РАСЧЁТ СТАТИЧЕСКИ НЕОПРЕДЕЛИМЫХ СИСТЕМ СМЕШАННЫМ МЕТОДОМ
nX
nX
nZ
nZ
Перемещения в ОССМ по направлениям силовых
РАСЧЁТ СТАТИЧЕСКИ НЕОПРЕДЕЛИМЫХ СИСТЕМ СМЕШАННЫМ МЕТОДОМ
nX
nX
nZ
nZ
Перемещения в ОССМ по направлениям силовых
РАСЧЁТ СТАТИЧЕСКИ НЕОПРЕДЕЛИМЫХ СИСТЕМ СМЕШАННЫМ МЕТОДОМ
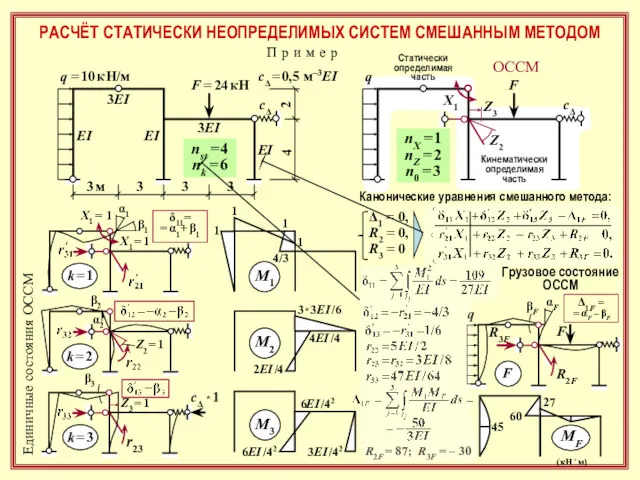
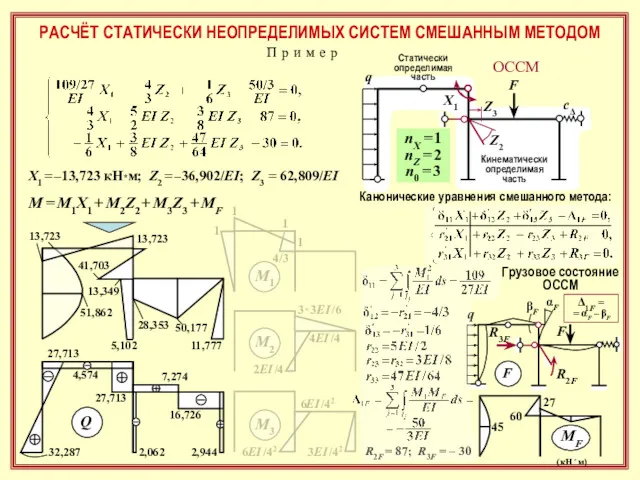
П р и м е р
EI
EI
EI
3EI
3EI
q
РАСЧЁТ СТАТИЧЕСКИ НЕОПРЕДЕЛИМЫХ СИСТЕМ СМЕШАННЫМ МЕТОДОМ
П р и м е р
EI
EI
EI
3EI
3EI
q
РАСЧЁТ СТАТИЧЕСКИ НЕОПРЕДЕЛИМЫХ СИСТЕМ СМЕШАННЫМ МЕТОДОМ
П р и м е р
EI
EI
EI
3EI
3EI
q
РАСЧЁТ СТАТИЧЕСКИ НЕОПРЕДЕЛИМЫХ СИСТЕМ СМЕШАННЫМ МЕТОДОМ
П р и м е р
EI
EI
EI
3EI
3EI
q

РАСЧЁТ СТАТИЧЕСКИ НЕОПРЕДЕЛИМЫХ СИСТЕМ СМЕШАННЫМ МЕТОДОМ
П р и м е р
q
F
cΔ
X1
Z2
Z3
nX
РАСЧЁТ СТАТИЧЕСКИ НЕОПРЕДЕЛИМЫХ СИСТЕМ СМЕШАННЫМ МЕТОДОМ
П р и м е р
q
F
cΔ
X1
Z2
Z3
nX
РАСЧЁТ СТАТИЧЕСКИ НЕОПРЕДЕЛИМЫХ СИСТЕМ СМЕШАННЫМ МЕТОДОМ
П р и м е р
q
F
cΔ
X1
Z2
Z3
nX
РАСЧЁТ СТАТИЧЕСКИ НЕОПРЕДЕЛИМЫХ СИСТЕМ СМЕШАННЫМ МЕТОДОМ
П р и м е р
q
F
cΔ
X1
Z2
Z3
nX
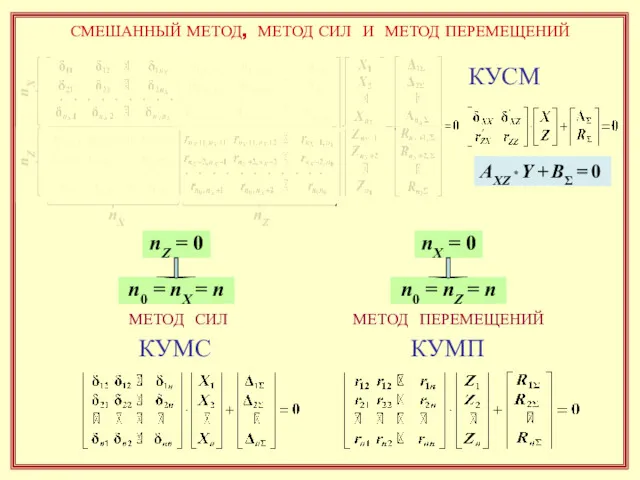
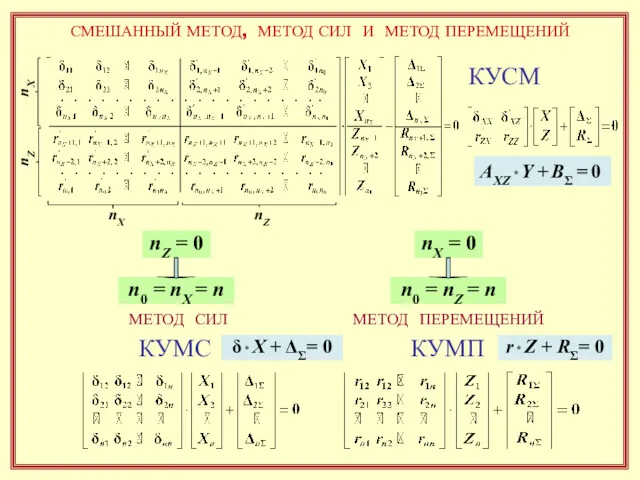
СМЕШАННЫЙ МЕТОД, МЕТОД СИЛ И МЕТОД ПЕРЕМЕЩЕНИЙ
. . . . .
СМЕШАННЫЙ МЕТОД, МЕТОД СИЛ И МЕТОД ПЕРЕМЕЩЕНИЙ
. . . . .
СМЕШАННЫЙ МЕТОД, МЕТОД СИЛ И МЕТОД ПЕРЕМЕЩЕНИЙ
. . . . .
СМЕШАННЫЙ МЕТОД, МЕТОД СИЛ И МЕТОД ПЕРЕМЕЩЕНИЙ
. . . . .
СМЕШАННЫЙ МЕТОД, МЕТОД СИЛ И МЕТОД ПЕРЕМЕЩЕНИЙ
Р е з ю м
СМЕШАННЫЙ МЕТОД, МЕТОД СИЛ И МЕТОД ПЕРЕМЕЩЕНИЙ
Р е з ю м
СМЕШАННЫЙ МЕТОД, МЕТОД СИЛ И МЕТОД ПЕРЕМЕЩЕНИЙ
Р е з ю м
СМЕШАННЫЙ МЕТОД, МЕТОД СИЛ И МЕТОД ПЕРЕМЕЩЕНИЙ
Р е з ю м
К о н т р о л ь н ы е
К о н т р о л ь н ы е
 Предел функции. Непрерывность
Предел функции. Непрерывность Parallelogram
Parallelogram Функция. Область определения и множество значений функции
Функция. Область определения и множество значений функции открытый урок по математике
открытый урок по математике Статистический анализ связей
Статистический анализ связей Как называются квадратные уравнения, если а=1?
Как называются квадратные уравнения, если а=1? Модульное планирование курса математики. 5 класс
Модульное планирование курса математики. 5 класс Таблицы последовательного расширения понятия степени и изучения соответствующих случаев степенной функции
Таблицы последовательного расширения понятия степени и изучения соответствующих случаев степенной функции Число 5. Цифра 5
Число 5. Цифра 5 Логические величины и выражения
Логические величины и выражения Основные теоремы теории вероятностей
Основные теоремы теории вероятностей Предшкольная подготовка. Презентация к занятию по математике Я учусь считать. Цифра 7
Предшкольная подготовка. Презентация к занятию по математике Я учусь считать. Цифра 7 Пирамида. Определение пирамиды и её элементов
Пирамида. Определение пирамиды и её элементов Координатная плоскость (часть 3)
Координатная плоскость (часть 3) Решение систем уравнений второй степени. 9 класс
Решение систем уравнений второй степени. 9 класс Действия с обыкновенными дробями. 6 класс
Действия с обыкновенными дробями. 6 класс Квадрат суммы. Квадрат разности
Квадрат суммы. Квадрат разности Числовые неравенства и их свойства
Числовые неравенства и их свойства Статистическая обработка данных
Статистическая обработка данных Сложение и вычитание в пределах 100
Сложение и вычитание в пределах 100 Многогранники. Понятие многогранника. Призма
Многогранники. Понятие многогранника. Призма Математики и их открытия в годы Великой Отечественной войны
Математики и их открытия в годы Великой Отечественной войны Движение в пространстве. (10 класс)
Движение в пространстве. (10 класс) Алгоритмически неразрешимые проблемы. Машина Тьюринга
Алгоритмически неразрешимые проблемы. Машина Тьюринга Вероятность произведения независимых событий
Вероятность произведения независимых событий Письменное умножение трёхзначного числа на однозначное
Письменное умножение трёхзначного числа на однозначное Число-9
Число-9 Описательная статистика. Урок повторения и закрепления знаний
Описательная статистика. Урок повторения и закрепления знаний