- Задача о положении механизмов параллельной структуры

Содержание
- 2. Постановка задачи По заданному вектору обобщенных координат манипулятора q=(q1, q2 , ..., qN )T найти положение
- 3. Платформа Гью-Стюарта 6-3 (Робот 6-3) - обобщенные координаты - положение и ориентация платформы
- 4. Решение с помощью вычисления аналитического уравнения плоскости
- 5. Координаты шарниров основания
- 6. Полученная система уравнений – расстояние между шарнирами подвижной платформы – элементы вектора обобщенных координат манипулятора
- 7. Координаты вспомогательной точки: Каноническое уравнение плоскости:
- 8. Элементы матрицы поворота Направляющие косинусы оси ОZ Направляющие косинусы оси ОX
- 9. Элементы матрицы поворота и вектора переноса Направляющие косинусы оси ОY Элементы вектора переноса
- 10. Искомая матрица однородного преобразования
- 11. Платформа Гью-Стюарта 6-6 (Робот 6-6)
- 12. Введение виртуальных точек
- 13. Координаты шарниров, выраженные через виртуальные точки Коэффициент линейной пропорциональности
- 15. Элементы матрицы поворота Направляющие косинусы оси ОZ Направляющие косинусы оси ОX
- 16. Элементы матрицы поворота и вектора переноса Направляющие косинусы оси ОY Элементы вектора переноса
- 17. Искомая матрица однородного преобразования
- 18. Моделирование движения механизма Алгоритм: Выбрать закон изменения обобщенных координат. Если закон непрерывный – дискретизировать. Для набора
- 19. Численный пример
- 21. Скачать презентацию
Постановка задачи
По заданному вектору обобщенных координат манипулятора
q=(q1, q2 , ...,
Постановка задачи
По заданному вектору обобщенных координат манипулятора
q=(q1, q2 , ...,
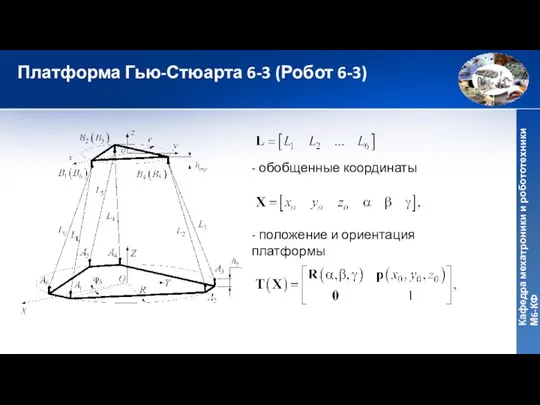
Платформа Гью-Стюарта 6-3 (Робот 6-3)
- обобщенные координаты
- положение и ориентация платформы
Платформа Гью-Стюарта 6-3 (Робот 6-3)
- обобщенные координаты
- положение и ориентация платформы
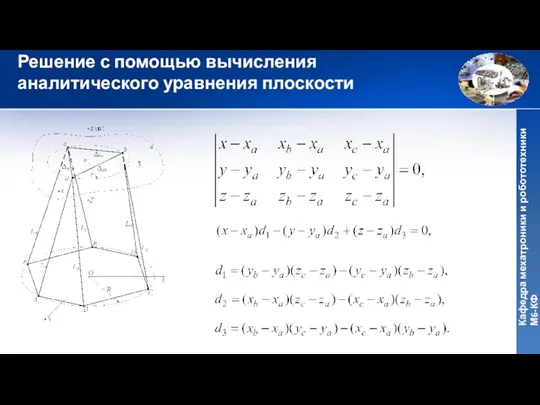
Решение с помощью вычисления аналитического уравнения плоскости
Решение с помощью вычисления аналитического уравнения плоскости
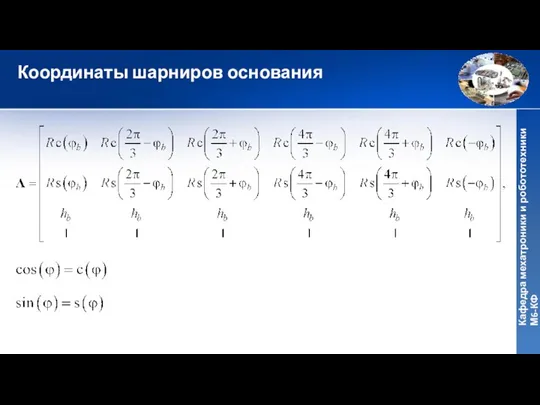
Координаты шарниров основания
Координаты шарниров основания
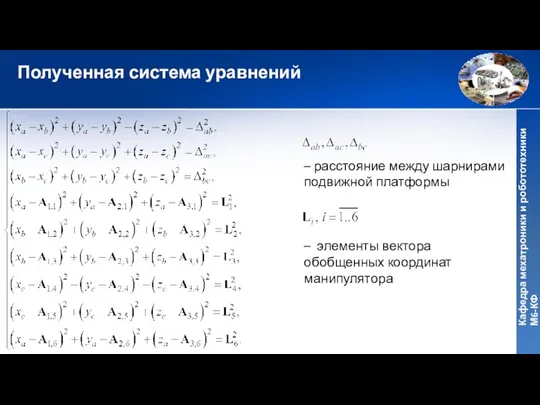
Полученная система уравнений
– расстояние между шарнирами подвижной платформы
– элементы вектора обобщенных
Полученная система уравнений
– расстояние между шарнирами подвижной платформы
– элементы вектора обобщенных
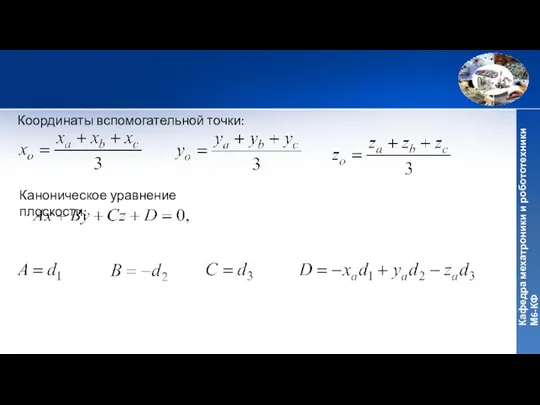
Координаты вспомогательной точки:
Каноническое уравнение плоскости:
Координаты вспомогательной точки:
Каноническое уравнение плоскости:
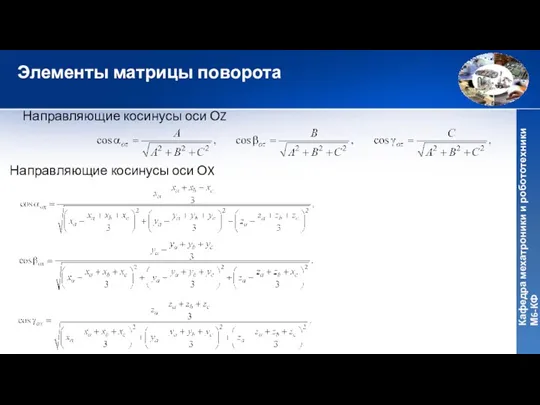
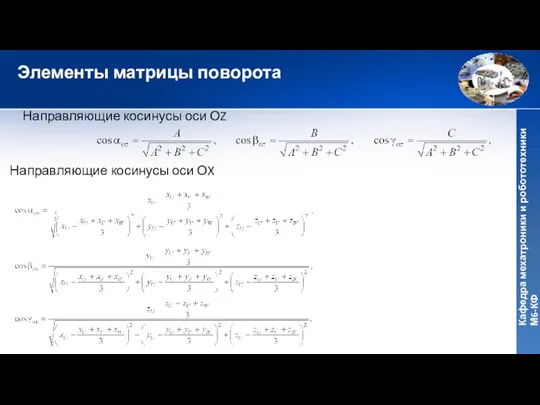
Элементы матрицы поворота
Направляющие косинусы оси ОZ
Направляющие косинусы оси ОX
Элементы матрицы поворота
Направляющие косинусы оси ОZ
Направляющие косинусы оси ОX
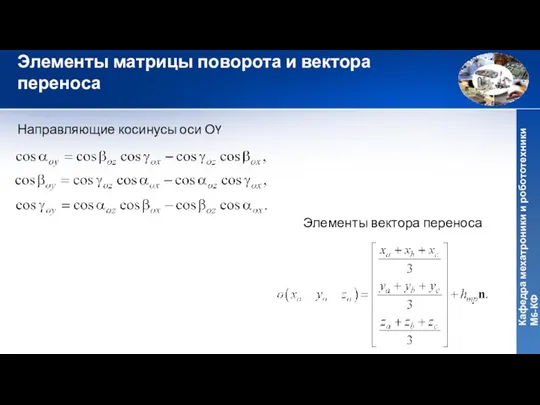
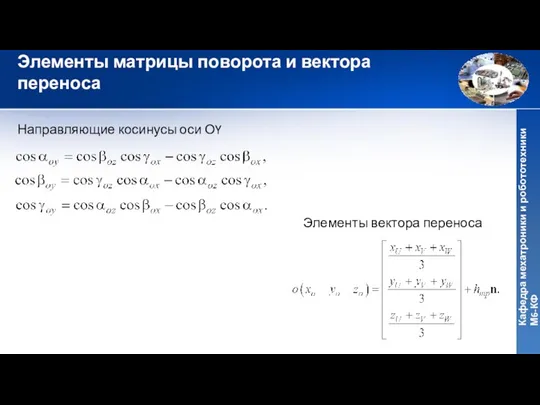
Элементы матрицы поворота и вектора переноса
Направляющие косинусы оси ОY
Элементы вектора переноса
Элементы матрицы поворота и вектора переноса
Направляющие косинусы оси ОY
Элементы вектора переноса
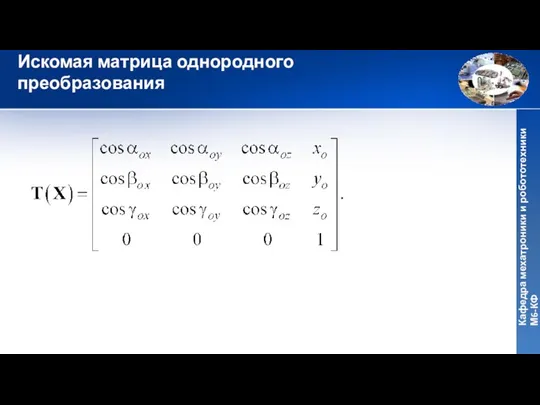
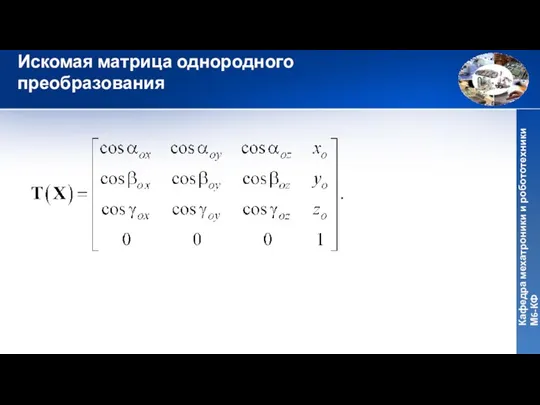
Искомая матрица однородного преобразования
Искомая матрица однородного преобразования
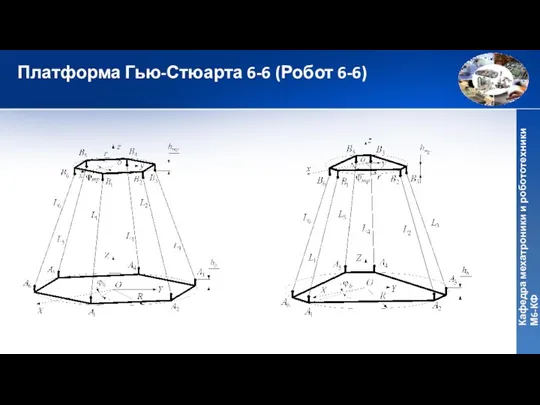
Платформа Гью-Стюарта 6-6 (Робот 6-6)
Платформа Гью-Стюарта 6-6 (Робот 6-6)
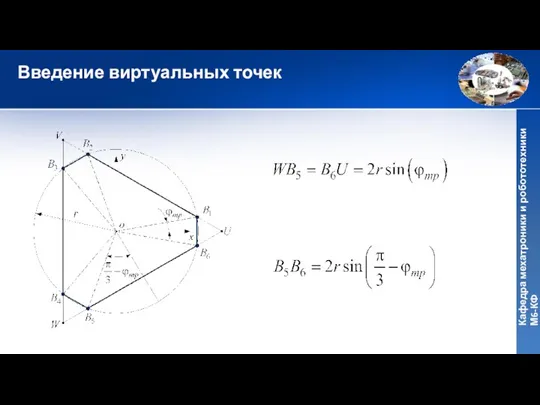
Введение виртуальных точек
Введение виртуальных точек
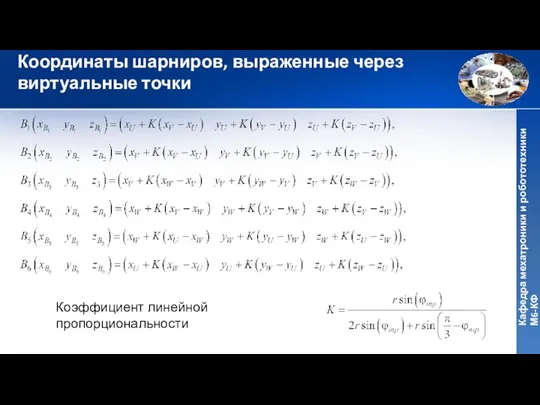
Координаты шарниров, выраженные через виртуальные точки
Коэффициент линейной пропорциональности
Координаты шарниров, выраженные через виртуальные точки
Коэффициент линейной пропорциональности

Элементы матрицы поворота
Направляющие косинусы оси ОZ
Направляющие косинусы оси ОX
Элементы матрицы поворота
Направляющие косинусы оси ОZ
Направляющие косинусы оси ОX
Элементы матрицы поворота и вектора переноса
Направляющие косинусы оси ОY
Элементы вектора переноса
Элементы матрицы поворота и вектора переноса
Направляющие косинусы оси ОY
Элементы вектора переноса
Искомая матрица однородного преобразования
Искомая матрица однородного преобразования
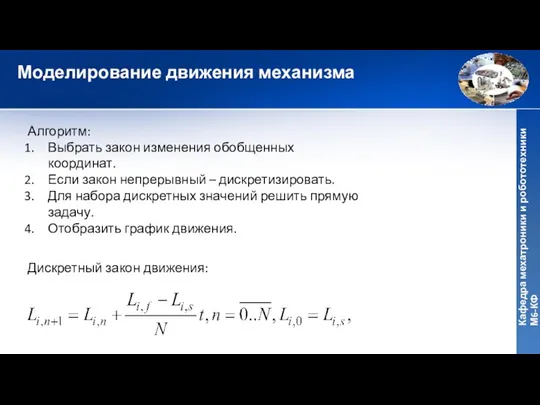
Моделирование движения механизма
Алгоритм:
Выбрать закон изменения обобщенных координат.
Если закон непрерывный – дискретизировать.
Для
Моделирование движения механизма
Алгоритм:
Выбрать закон изменения обобщенных координат.
Если закон непрерывный – дискретизировать.
Для
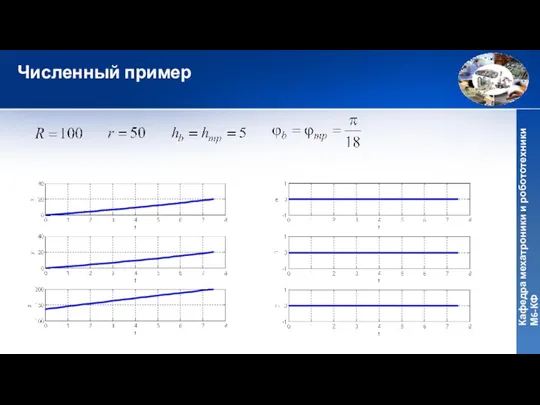
Численный пример
Численный пример
 Transactions and database integrity
Transactions and database integrity Округление чисел до десятков, сотен. 5 класс
Округление чисел до десятков, сотен. 5 класс Математика. 4 класс. Устный счет.
Математика. 4 класс. Устный счет. Франсуа Виет
Франсуа Виет Имитационное моделирование. Примеры математических моделей (лекция 4)
Имитационное моделирование. Примеры математических моделей (лекция 4) Задачи Григория Остера для первоклассников.
Задачи Григория Остера для первоклассников. Абсолютные и относительные величины
Абсолютные и относительные величины Комбинаторика. 5 класс
Комбинаторика. 5 класс Основные категории и понятия статистики. Статистическое наблюдение. Лекция 1
Основные категории и понятия статистики. Статистическое наблюдение. Лекция 1 Треугольники и их виды
Треугольники и их виды Симметрия
Симметрия Разложение числа на простые множители
Разложение числа на простые множители Решение квадратных уравнений
Решение квадратных уравнений Конспект урока по математике во 2 классе
Конспект урока по математике во 2 классе Связь между бесконечно малыми и бесконечно большими величинами
Связь между бесконечно малыми и бесконечно большими величинами Проценты. Конспект и презентация к уроку математики. Диск
Проценты. Конспект и презентация к уроку математики. Диск Квадратные уравнения. Способы их решения. 8 класс
Квадратные уравнения. Способы их решения. 8 класс Линейное уравнение с двумя переменными
Линейное уравнение с двумя переменными Какие дроби называются неправильными?
Какие дроби называются неправильными? Теория кривых. Формулы Сере-Френе
Теория кривых. Формулы Сере-Френе Сумма углов треугольника
Сумма углов треугольника Задачи про Хэллоуин. Загадочные ведьмы
Задачи про Хэллоуин. Загадочные ведьмы Отрезок
Отрезок Эконометрическое моделирование. (Лекции 5, 6, 7)
Эконометрическое моделирование. (Лекции 5, 6, 7) Элементы комбинаторики
Элементы комбинаторики Единицы длины и площади. Презентация.
Единицы длины и площади. Презентация. Устойчивость решений дискретных систем
Устойчивость решений дискретных систем Обыкновенные дроби. Деление дробей
Обыкновенные дроби. Деление дробей