- Обзор современного состояния теории управления

Содержание
- 2. Обобщенная структура системы управления Система управления – это устройство или набор устройств, предназначенных для обеспечения требуемого
- 3. Подсистема управления продольным наклоном (угол тангажа) пассажирского авиалайнера имеет два входа, два выхода , подвержена внешним
- 4. Управление электродвигателем Датчики Объект управления Устройство сопряжения с объектом управления Контроллер Кнопки MMI
- 5. Птицы ( и даже некоторые виды бабочек) успешно решают навигационные задачи без использования спутниковых технологий Системы
- 6. Следующий этап в развитии теории управления подразумевает продвижение по двум направлениям : cинтез классических теорий управления,
- 7. Системы с нечеткой логикой, нейронные системы управления настраиваемые и обучаемые системы Направления современных исследований Многоканальные системы
- 8. Классы систем управления Системы управления без обратной связью (архаизм: системы программного управления ) Системы управления с
- 9. Регулятор с обратной связью регулятор числа оборотов паровой машины с обратной связью
- 10. К настоящему времени хорошо изучены линейные системы с одним входом и одним выходом (SISO - single
- 11. Системы управления с обратной связью Управляемое устройство (Plant) Контроллер (Controller) Σ Возмущающее воздействие (Disturbance) Преобразователь (Transducer)
- 12. PID - регулятор Пропорционально-интегрально-дифференциальный ( Proportional-Integral – Differentional) регулятор — устройство в цепи обратной связи для
- 13. Пропорциональная составляющая вырабатывает выходной сигнал, противодействующий отклонению регулируемой величины от заданного значения, наблюдаемому в данный момент
- 14. Интегральная составляющая пропорциональна интегралу от отклонения регулируемой величины. Её используют для устранения статической ошибки. Она позволяет
- 15. Модель электрического привода Решение задачи Коши требует задания начальных условий w(o)=w0 I(0)=I0 и функции действующего напряжения
- 16. Верификация модели Условие стационарности при V=Vmax = Моделирование в Mathcad 14
- 17. PD-регулятор Моделирование в среде MathCad 14
- 18. Статическая ошибка P-регулятора Wref = 5.33 Imax =40 Kp = 1 Kp = 5
- 19. Сравнение P и PD регуляторов
- 20. PID регулятор
- 21. Система климат контроля Неверный выбор параметров терморегулятора или неправильная работа гарантировано приводит к выходу объекта из
- 22. Способы описания систем МАКРОПОДХОД АНАЛИЗ ЛИНЕЙНЫХ (ЛИНЕАРИЗУЕМЫХ) СИСТЕМ СО СЛОЖНОЙ СТРУКТУРОЙ, БАЗИРУЮЩИЙСЯ НА СООТНОШЕНИИ : ВХОДНОЕ
- 23. Микро описание систем базируется на детальном описании внутренней структуры управляемого объекта и системы управления. Для описания
- 24. МИКРОПИСАНИЕ СИСТЕМ x(t) - вектор описания состояния объекта управления p (x,t) – вектор описания параметров объекта
- 25. УПРАВЛЯЕМОСТЬ Задачу идентификации объекта управления можно рассматривать как сопряженную по отношению к задаче управления, так как
- 26. Численное моделирование систем Даже сильно упрощенные линеаризованные системы для которых имеются аналитические решения требуют использования численных
- 27. Виртуальный мобильный робот SOFA-2009 SOFA-2009 определяется параметрами : Dw = 0.3 // диаметр колеса Lr =
- 28. Моделирование SOFA-2009 Поворот влево на π/4
- 29. Экспериментальная отработка систем управления Теория вещь необходимая, но ……. Разработка, отработка и сопровождение реальных систем невозможны
- 30. Автономный робот “PHOENIX-3” Структура системы управления
- 31. НЕЛИНЕЙНЫЕ ФУНКЦИИ SIMULINK Реальные системы являются нелинейными всегда !
- 32. Системы с насыщением В теории систем выделен класс BIBO (Bounded Input– Bounded Output) Ограничения по выходу
- 33. Целью управления является перевод системы из состояния x0(t0) в требуемое состояние, описываемое вектором состояния в конечной
- 34. В узком смысле оптимальное управление речь идет о выборе такого варианта управления их всех возможных, который
- 35. Устойчивость систем Этот направление в теории систем было заложено Ляпуновым в его диссертации, защищенной в начале
- 36. Из условий Математическая формулировка критерия устойчивости по Ляпунову Пусть x(t) решение задачи Коши для системы dx/dt
- 37. Теория катастроф Основополагающее утверждение теория катастроф ( теорема Тома) В системах с числом каналов управления до
- 38. Элементарные катастрофы c - количество каналов управления d - размерность функции описания поведения объекта Элементарные теория
- 40. Скачать презентацию

Обобщенная структура системы управления
Система управления – это устройство или
Обобщенная структура системы управления
Система управления – это устройство или
Подсистема управления продольным наклоном (угол тангажа) пассажирского авиалайнера имеет два входа,
Подсистема управления продольным наклоном (угол тангажа) пассажирского авиалайнера имеет два входа,
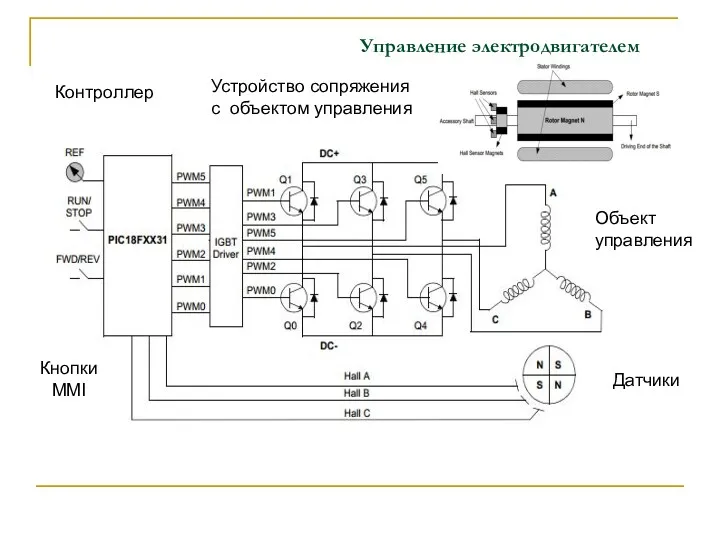
Управление электродвигателем
Датчики
Объект
управления
Устройство сопряжения с объектом управления
Контроллер
Кнопки
MMI
Управление электродвигателем
Датчики
Объект
управления
Устройство сопряжения с объектом управления
Контроллер
Кнопки
MMI
Птицы ( и даже некоторые виды бабочек) успешно решают навигационные
Птицы ( и даже некоторые виды бабочек) успешно решают навигационные

Следующий этап в развитии теории управления подразумевает продвижение по двум направлениям
Следующий этап в развитии теории управления подразумевает продвижение по двум направлениям
Системы с нечеткой логикой, нейронные системы управления
настраиваемые и обучаемые
Системы с нечеткой логикой, нейронные системы управления
настраиваемые и обучаемые

Классы систем управления
Системы управления
без обратной связью
(архаизм: системы программного управления )
Классы систем управления
Системы управления
без обратной связью
(архаизм: системы программного управления )
Регулятор с обратной связью
регулятор числа оборотов паровой машины с
Регулятор с обратной связью
регулятор числа оборотов паровой машины с
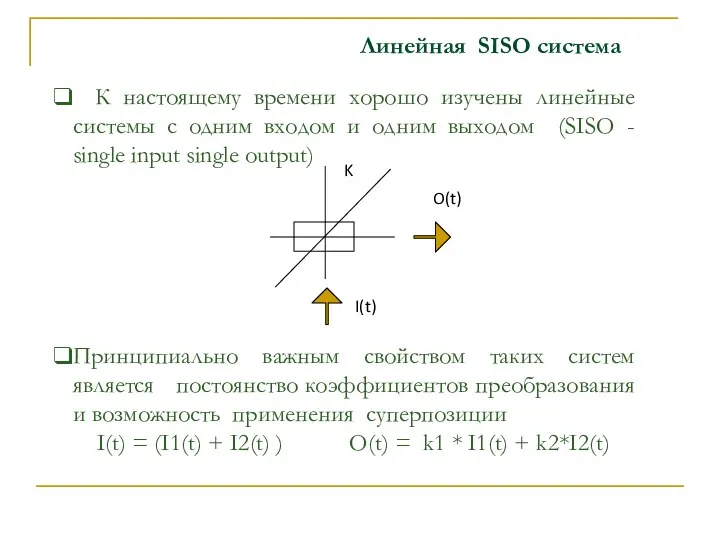
К настоящему времени хорошо изучены линейные системы с одним входом
К настоящему времени хорошо изучены линейные системы с одним входом
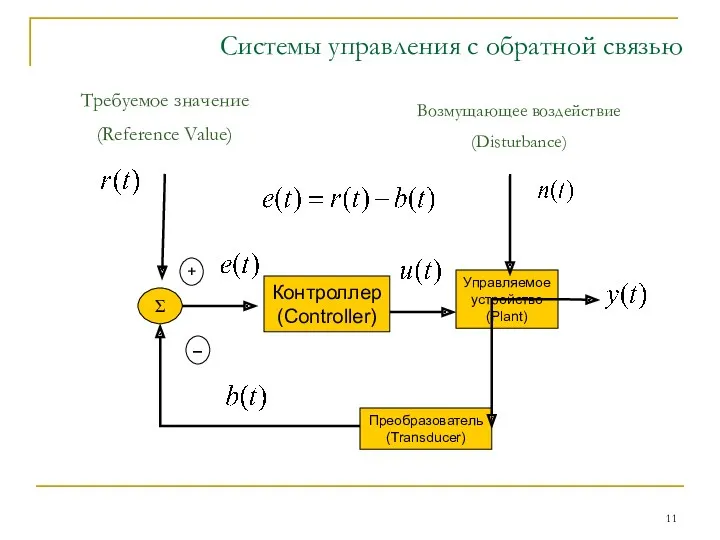
Системы управления с обратной связью
Управляемое
устройство
(Plant)
Контроллер
(Controller)
Σ
Возмущающее воздействие
(Disturbance)
Преобразователь
(Transducer)
+
–
Требуемое значение
(Reference Value)
Системы управления с обратной связью
Управляемое
устройство
(Plant)
Контроллер
(Controller)
Σ
Возмущающее воздействие
(Disturbance)
Преобразователь
(Transducer)
+
–
Требуемое значение
(Reference Value)
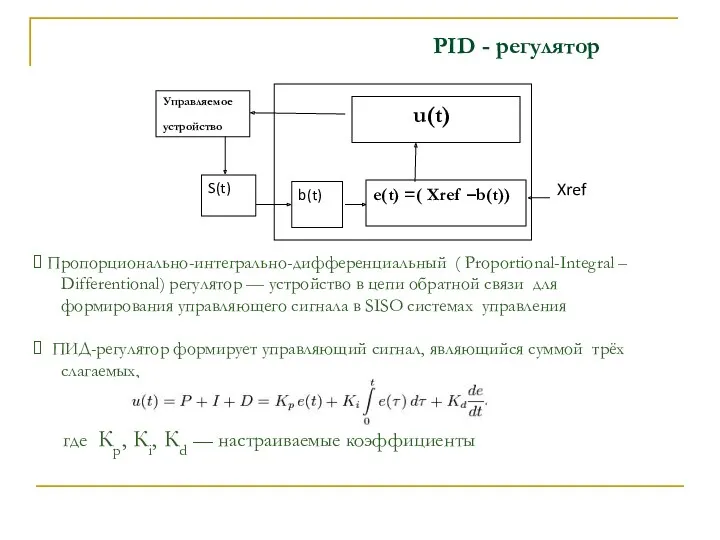
PID - регулятор
Пропорционально-интегрально-дифференциальный ( Proportional-Integral –
Differentional) регулятор — устройство в
PID - регулятор
Пропорционально-интегрально-дифференциальный ( Proportional-Integral –
Differentional) регулятор — устройство в
Пропорциональная составляющая вырабатывает выходной сигнал, противодействующий отклонению регулируемой величины от
Пропорциональная составляющая вырабатывает выходной сигнал, противодействующий отклонению регулируемой величины от
Интегральная составляющая пропорциональна интегралу от отклонения регулируемой величины. Её используют
Интегральная составляющая пропорциональна интегралу от отклонения регулируемой величины. Её используют
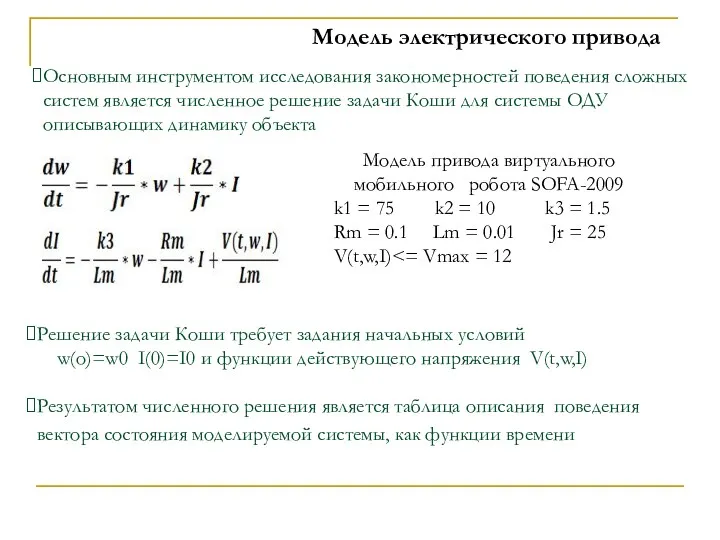
Модель электрического привода
Решение задачи Коши требует задания начальных условий
Модель электрического привода
Решение задачи Коши требует задания начальных условий
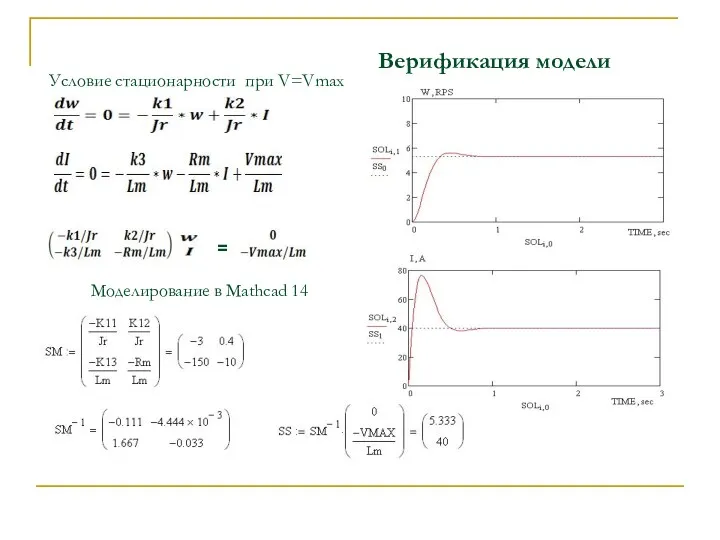
Верификация модели
Условие стационарности при V=Vmax
=
Моделирование в Mathcad 14
Верификация модели
Условие стационарности при V=Vmax
=
Моделирование в Mathcad 14
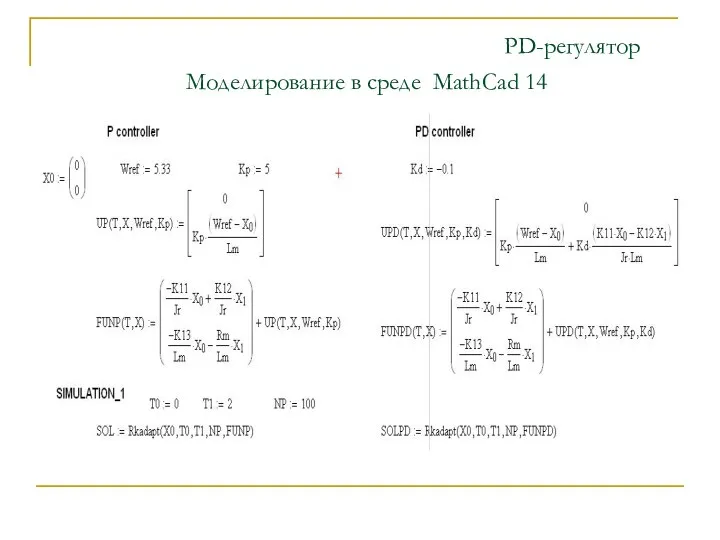
PD-регулятор
Моделирование в среде MathCad 14
PD-регулятор
Моделирование в среде MathCad 14
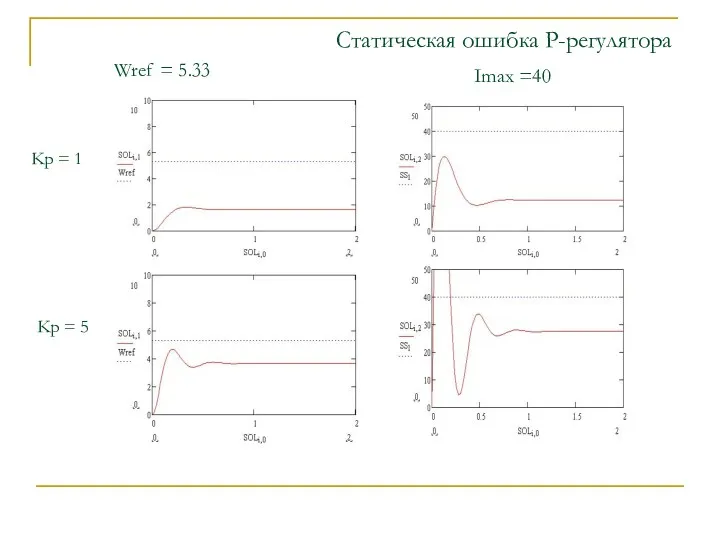
Статическая ошибка P-регулятора
Wref = 5.33
Imax =40
Kp =
Статическая ошибка P-регулятора
Wref = 5.33
Imax =40
Kp =
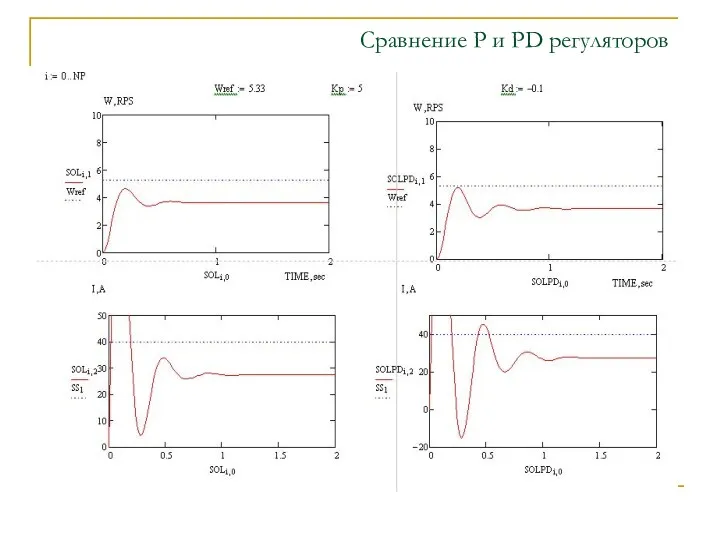
Сравнение P и PD регуляторов
Сравнение P и PD регуляторов
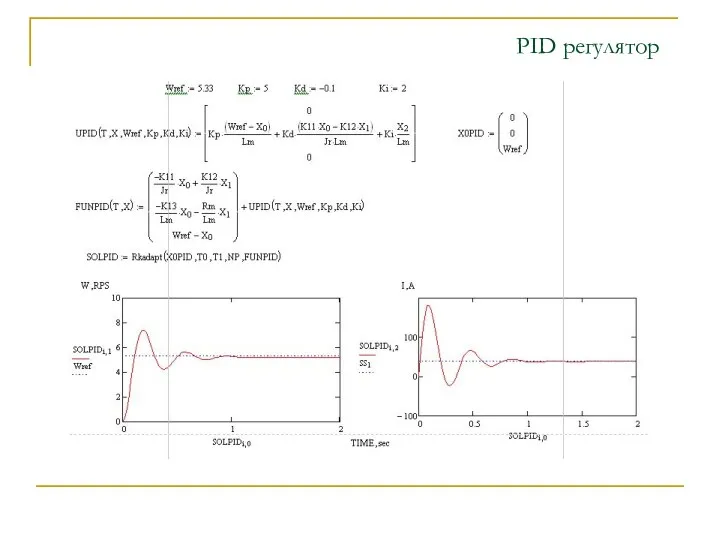
PID регулятор
PID регулятор

Система климат контроля
Неверный выбор параметров терморегулятора или неправильная работа
гарантировано
Система климат контроля
Неверный выбор параметров терморегулятора или неправильная работа
гарантировано
Способы описания систем
МАКРОПОДХОД
АНАЛИЗ ЛИНЕЙНЫХ (ЛИНЕАРИЗУЕМЫХ) СИСТЕМ СО СЛОЖНОЙ СТРУКТУРОЙ, БАЗИРУЮЩИЙСЯ
Способы описания систем
МАКРОПОДХОД
АНАЛИЗ ЛИНЕЙНЫХ (ЛИНЕАРИЗУЕМЫХ) СИСТЕМ СО СЛОЖНОЙ СТРУКТУРОЙ, БАЗИРУЮЩИЙСЯ
Микро описание систем базируется на детальном описании внутренней структуры управляемого объекта
Микро описание систем базируется на детальном описании внутренней структуры управляемого объекта
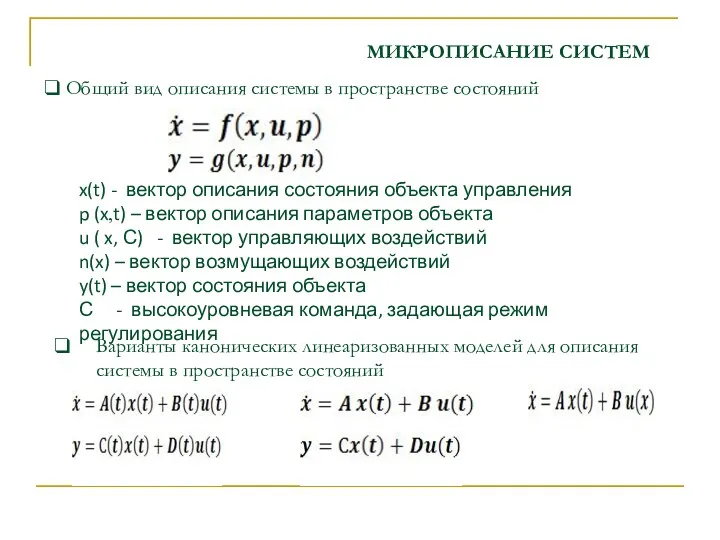
МИКРОПИСАНИЕ СИСТЕМ
x(t) - вектор описания состояния объекта управления
p (x,t) –
МИКРОПИСАНИЕ СИСТЕМ
x(t) - вектор описания состояния объекта управления
p (x,t) –
УПРАВЛЯЕМОСТЬ
Задачу идентификации объекта управления можно рассматривать как сопряженную по отношению
УПРАВЛЯЕМОСТЬ
Задачу идентификации объекта управления можно рассматривать как сопряженную по отношению
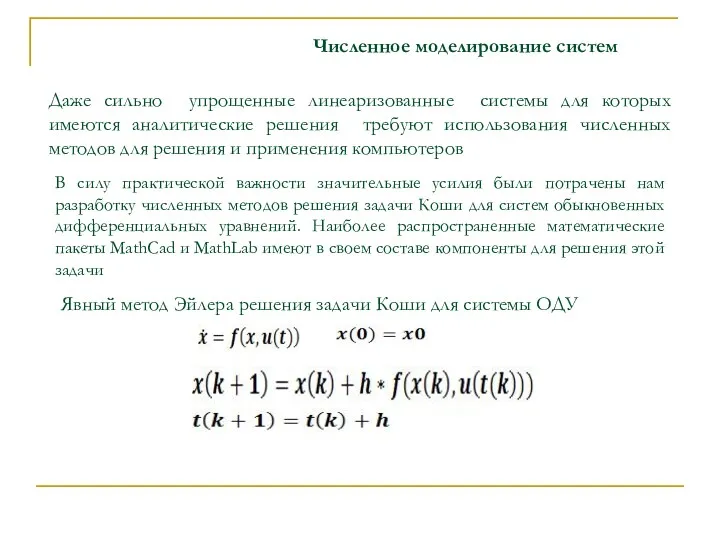
Численное моделирование систем
Даже сильно упрощенные линеаризованные системы для которых имеются
Численное моделирование систем
Даже сильно упрощенные линеаризованные системы для которых имеются
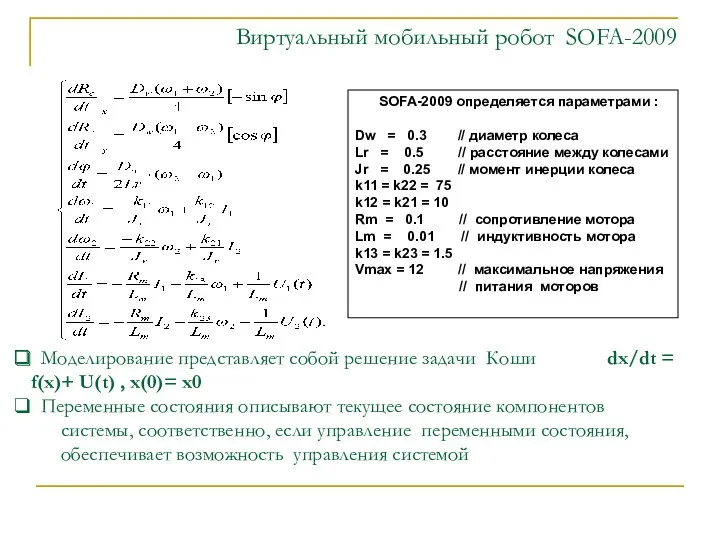
Виртуальный мобильный робот SOFA-2009
SOFA-2009 определяется параметрами :
Dw = 0.3 //
Виртуальный мобильный робот SOFA-2009
SOFA-2009 определяется параметрами :
Dw = 0.3 //
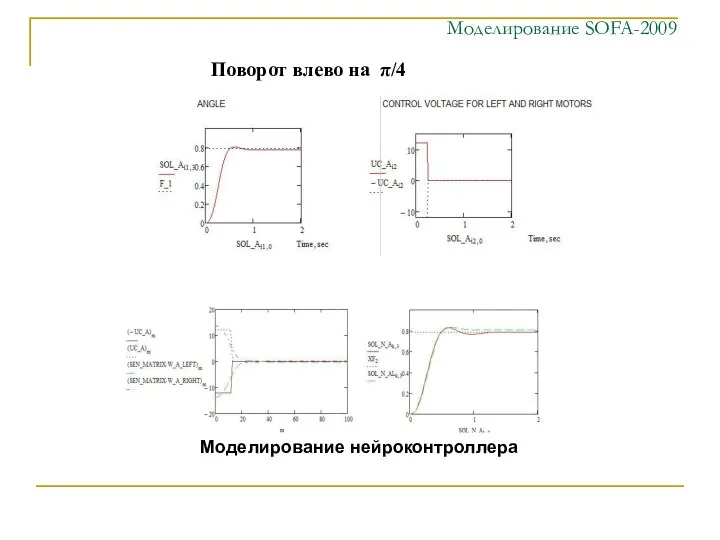
Моделирование SOFA-2009
Поворот влево на π/4
Моделирование SOFA-2009
Поворот влево на π/4

Экспериментальная отработка систем управления
Теория вещь необходимая, но …….
Экспериментальная отработка систем управления
Теория вещь необходимая, но …….
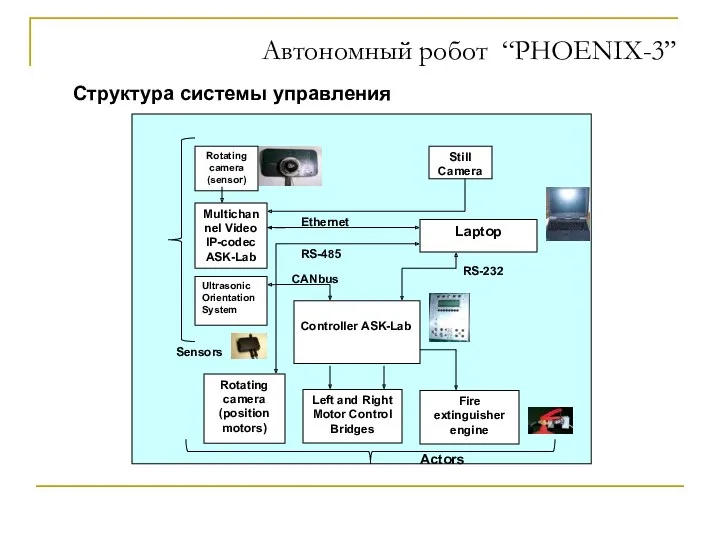
Автономный робот “PHOENIX-3”
Структура системы управления
Автономный робот “PHOENIX-3”
Структура системы управления

НЕЛИНЕЙНЫЕ ФУНКЦИИ SIMULINK
Реальные системы являются нелинейными всегда !
НЕЛИНЕЙНЫЕ ФУНКЦИИ SIMULINK
Реальные системы являются нелинейными всегда !
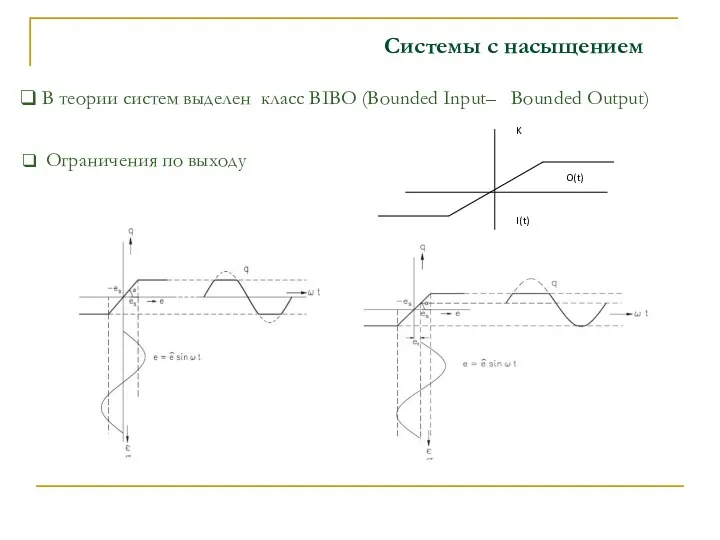
Системы с насыщением
В теории систем выделен класс BIBO
Системы с насыщением
В теории систем выделен класс BIBO
Целью управления является перевод системы из состояния x0(t0) в требуемое состояние,
В узком смысле оптимальное управление речь идет о выборе такого варианта
Устойчивость систем
Этот направление в теории систем было
Устойчивость систем
Этот направление в теории систем было
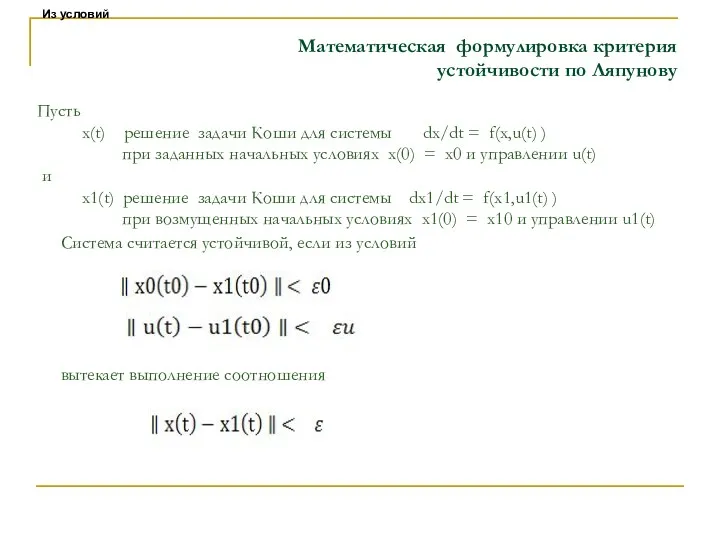
Из условий
Математическая формулировка критерия устойчивости по Ляпунову
Пусть
x(t)
Из условий
Математическая формулировка критерия устойчивости по Ляпунову
Пусть
x(t)
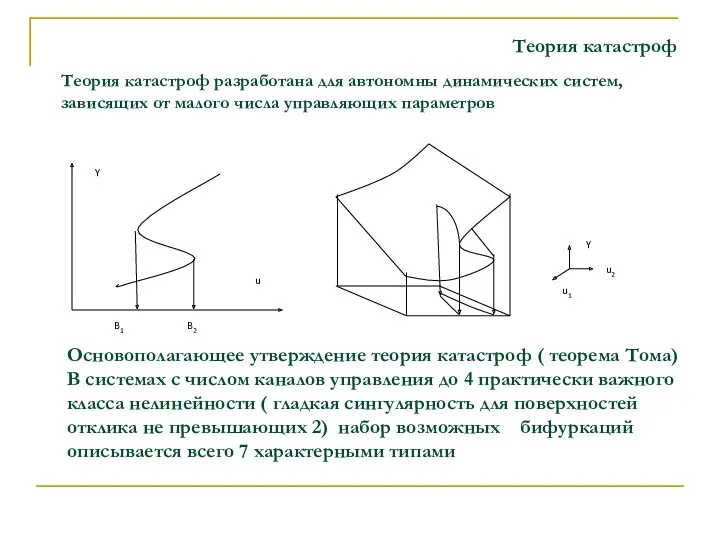
Теория катастроф
Основополагающее утверждение теория катастроф ( теорема Тома)
В системах
Теория катастроф
Основополагающее утверждение теория катастроф ( теорема Тома)
В системах
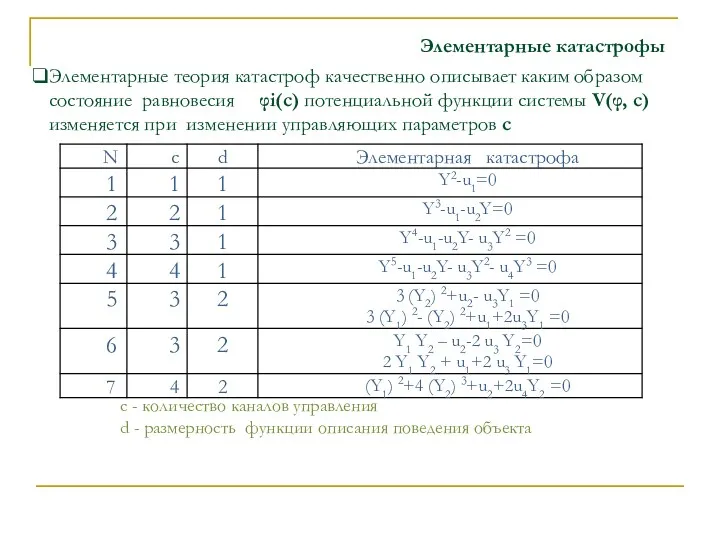
Элементарные катастрофы
c - количество каналов управления
d - размерность функции
Элементарные катастрофы
c - количество каналов управления
d - размерность функции
 Фармацевтикалық ұйымдарды басқарудағы коммуникация
Фармацевтикалық ұйымдарды басқарудағы коммуникация Повышение эффективности деятельности предприятия, путём совершенствования системы управленческого учёта. ЗАО Ижора-Энергосбыт
Повышение эффективности деятельности предприятия, путём совершенствования системы управленческого учёта. ЗАО Ижора-Энергосбыт Team Standards. Overview
Team Standards. Overview Корпоративное управление
Корпоративное управление Маленькие хитрости большого бизнеса (3). Мотивация топ- менеджеров Лукойл
Маленькие хитрости большого бизнеса (3). Мотивация топ- менеджеров Лукойл XYZ- анализ
XYZ- анализ Отдел технического контроля (ОТК)
Отдел технического контроля (ОТК) Организационные структуры управления в гостиницах
Организационные структуры управления в гостиницах Управление персоналом в системе менеджмента организаций
Управление персоналом в системе менеджмента организаций Іскерлік этика кодексі
Іскерлік этика кодексі Технология общения в различных деловых ситуациях: деловая беседа как основная форма делового общения
Технология общения в различных деловых ситуациях: деловая беседа как основная форма делового общения Введение в дисциплину Современные подходы к организационно-управленческой деятельности
Введение в дисциплину Современные подходы к организационно-управленческой деятельности Стили принятия управленческих решений
Стили принятия управленческих решений Концепция управления производством Точно в срок (Just in time)
Концепция управления производством Точно в срок (Just in time)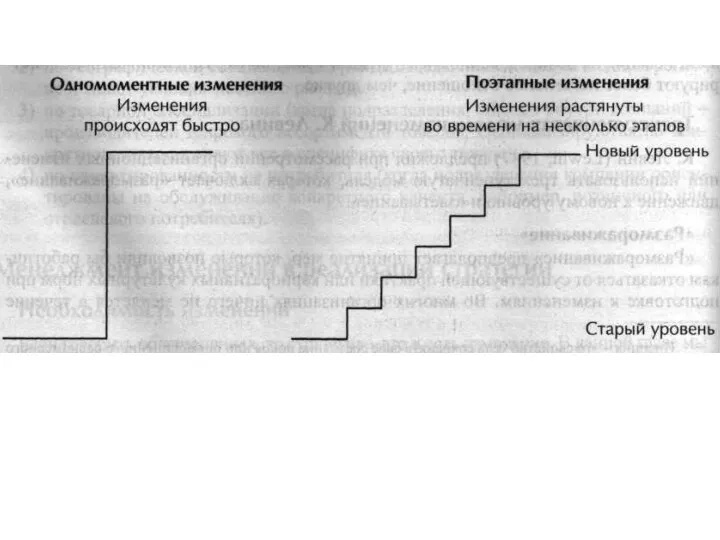 Изменения в организации и расходование ресурсов
Изменения в организации и расходование ресурсов Две команды. Две стратегии
Две команды. Две стратегии Педагогический менеджмент, как теория и практика управления образовательным процессом
Педагогический менеджмент, как теория и практика управления образовательным процессом Профессионально-ориентированная коммуникация
Профессионально-ориентированная коммуникация Decision Making and Relevant Information
Decision Making and Relevant Information Инструкция по работе с функционалом Справочник сотрудников в ИБ Мой Бизнес в части ЗП проектов
Инструкция по работе с функционалом Справочник сотрудников в ИБ Мой Бизнес в части ЗП проектов Trimble для сельского хозяйства
Trimble для сельского хозяйства Стратегии масштабирования бизнеса
Стратегии масштабирования бизнеса Управление качеством
Управление качеством Банковский менеджмент (1)
Банковский менеджмент (1) Работа с клиентской базой
Работа с клиентской базой Личность менеджера, власть и стиль управления
Личность менеджера, власть и стиль управления Повышение эффективности использования основных производственных фондов спортивного сооружения
Повышение эффективности использования основных производственных фондов спортивного сооружения Система документации по личному составу
Система документации по личному составу