- Апаратура обчислювальних засобів. Пристрій управління висотомірами (Заняття № 7.22)

Содержание
- 2. Устрій та бойове застосування КЗА 86Ж6 Тема №7: Апаратура обчислювальних засобів Заняття № 22 Пристрій управління
- 3. Навчальні питання 1. Принципи розв’язання задач вимірювання висоти в КЗА 86Ж6. 2. Призначення, склад і принцип
- 4. При розв’язанні задачі визначення висоти повітряних об’єктів, що супроводжуються в КЗА 86Ж6 можливо виникнення наступних випадків:
- 5. Якщо КТ-А належить РЛС ПРВ-17 в режимі кругового огляду, то аналізується ознака витка станції. Якщо виток
- 6. Для визначення висоти польоту ПО, які супроводжуються двохкоординатними станціями, використовується група програм УПР РВ, котра забезпечує
- 7. Рішення вказаної задачі виконується у наступній послідовності: вибір РВ для вимірів кута місця ВО; вибір ПО;
- 8. У першому випадку у формулярі технічного стану на БИВ РМ-5 несправний висотомір позначається колом і йому
- 9. Вибір ПО на вимір кута місця робиться періодично, раз у 10 сек, за результатами контролю стану
- 10. Інші ПО вибираються на вимір кута місця в порядку наступної пріоритетності: ПО з розпорядженням "Вимірити висоту"
- 11. Одночасно біля системної контрольної точки на РМ-5 відображаються символи Ц1 (Ц2). Цілевказівка вважається відпрацьованою при спільному
- 13. Повідомлення Т-РМ використовується в якості екстраполяційної точки, поруч з яким може відображатися символ Л, який означає
- 14. Повідомлення КТ-ОП, яке надійшло з РМ-5, аналізується на предмет коректності інформації, що міститься в ньому. Якщо
- 15. При надходженні повідомлення КТ-ОП з ознакою "Пропуск відлуння" ця ознака заноситься у формуляр ПО і в
- 16. Пристрій керування висотомірами УУВ призначений для забезпечення автоматичного вивидення антенних систем радіовисотомірів РВ на заданий азимут
- 17. УУВ являє собою пристрій сполучення між спецобчислювачем СВ-1 і двома радіовисотомірами РВ1 та РВ2, виконаний у
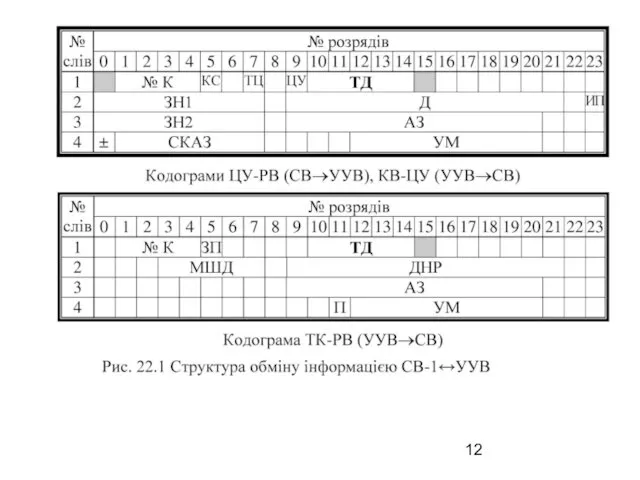
- 18. Отримані в повідомленнях ЦУ-РВ1 і ЦУ-РВ2 коди цілевказівок по β перетворюються в аналогові сигнали ССП β1
- 19. Від УУВ на РВ1 і РВ2 видаються синусоїдальні сигнали sinωt і cosωt. Зсув фаз φ1 і
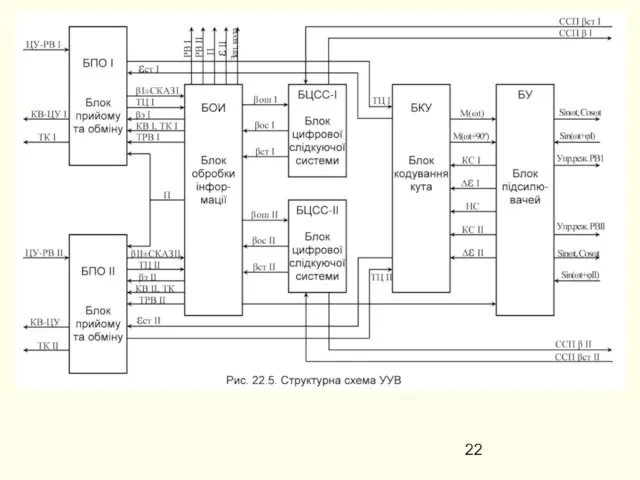
- 20. До складу УУВ входять наступні блоки: 2 блоки прийому й обміну БПО1 і БПО2; блок обробки
- 21. Блок прийому й обміну БПО призначений для прийому повідомлень ЦУ-РВ, збереження необхідної інформації і видачі повідомлень
- 23. Принцип роботи УУВ. При наявності інформації ЦУ для УУВ СВ-1 вступає в обмін з УУВ. До
- 24. Формувач сигналу помилки шляхом алгебраїчного додавання коду βє і коду азимута зворотного зв'язку βос формує 3-розрядний
- 26. Скачать презентацию
Устрій та бойове застосування КЗА 86Ж6
Тема №7: Апаратура обчислювальних засобів
Заняття №
Устрій та бойове застосування КЗА 86Ж6
Тема №7: Апаратура обчислювальних засобів
Заняття №
Навчальні питання
1. Принципи розв’язання задач вимірювання висоти в КЗА 86Ж6.
2. Призначення,
Навчальні питання
1. Принципи розв’язання задач вимірювання висоти в КЗА 86Ж6.
2. Призначення,
При розв’язанні задачі визначення висоти повітряних об’єктів, що супроводжуються в КЗА
При розв’язанні задачі визначення висоти повітряних об’єктів, що супроводжуються в КЗА
Якщо КТ-А належить РЛС ПРВ-17 в режимі кругового огляду, то аналізується
Якщо КТ-А належить РЛС ПРВ-17 в режимі кругового огляду, то аналізується
Для визначення висоти польоту ПО, які супроводжуються двохкоординатними станціями, використовується група
Для визначення висоти польоту ПО, які супроводжуються двохкоординатними станціями, використовується група
Рішення вказаної задачі виконується у наступній послідовності:
вибір РВ для вимірів кута
Рішення вказаної задачі виконується у наступній послідовності:
вибір РВ для вимірів кута
У першому випадку у формулярі технічного стану на БИВ РМ-5 несправний
У першому випадку у формулярі технічного стану на БИВ РМ-5 несправний
Вибір ПО на вимір кута місця робиться періодично, раз у 10 сек,
Вибір ПО на вимір кута місця робиться періодично, раз у 10 сек,
Інші ПО вибираються на вимір кута місця в порядку наступної пріоритетності:
ПО
Інші ПО вибираються на вимір кута місця в порядку наступної пріоритетності:
ПО
Одночасно біля системної контрольної точки на РМ-5 відображаються символи Ц1 (Ц2).
Одночасно біля системної контрольної точки на РМ-5 відображаються символи Ц1 (Ц2).
Повідомлення Т-РМ використовується в якості екстраполяційної точки, поруч з яким може
Повідомлення Т-РМ використовується в якості екстраполяційної точки, поруч з яким може
Повідомлення КТ-ОП, яке надійшло з РМ-5, аналізується на предмет коректності інформації,
Повідомлення КТ-ОП, яке надійшло з РМ-5, аналізується на предмет коректності інформації,
При надходженні повідомлення КТ-ОП з ознакою "Пропуск відлуння" ця ознака заноситься
При надходженні повідомлення КТ-ОП з ознакою "Пропуск відлуння" ця ознака заноситься
Пристрій керування висотомірами УУВ призначений для забезпечення автоматичного вивидення антенних систем
Пристрій керування висотомірами УУВ призначений для забезпечення автоматичного вивидення антенних систем
УУВ являє собою пристрій сполучення між спецобчислювачем СВ-1 і двома радіовисотомірами
УУВ являє собою пристрій сполучення між спецобчислювачем СВ-1 і двома радіовисотомірами

Отримані в повідомленнях ЦУ-РВ1 і ЦУ-РВ2 коди цілевказівок по β перетворюються
Отримані в повідомленнях ЦУ-РВ1 і ЦУ-РВ2 коди цілевказівок по β перетворюються
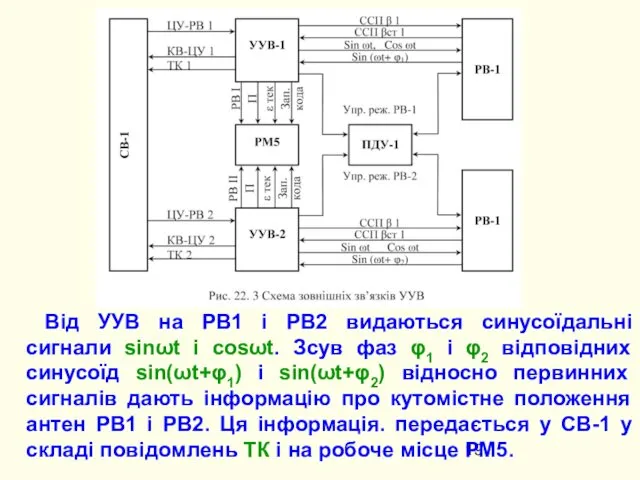
Від УУВ на РВ1 і РВ2 видаються синусоїдальні сигнали sinωt і
Від УУВ на РВ1 і РВ2 видаються синусоїдальні сигнали sinωt і
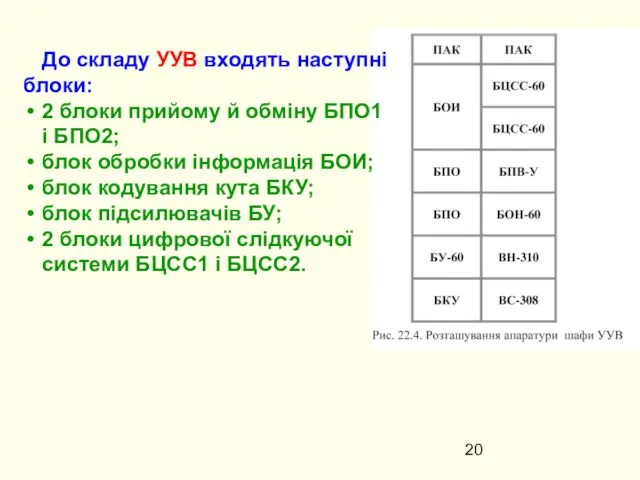
До складу УУВ входять наступні блоки:
2 блоки прийому й обміну
До складу УУВ входять наступні блоки:
2 блоки прийому й обміну
Блок прийому й обміну БПО призначений для прийому повідомлень ЦУ-РВ, збереження
Блок прийому й обміну БПО призначений для прийому повідомлень ЦУ-РВ, збереження
Принцип роботи УУВ.
При наявності інформації ЦУ для УУВ СВ-1 вступає
Принцип роботи УУВ.
При наявності інформації ЦУ для УУВ СВ-1 вступає
Формувач сигналу помилки шляхом алгебраїчного додавання коду βє і коду азимута
Формувач сигналу помилки шляхом алгебраїчного додавання коду βє і коду азимута
 Квалификационная работа. Cистема управления технологическим процессом травления
Квалификационная работа. Cистема управления технологическим процессом травления Эмбриология человека
Эмбриология человека Открытка с 8 марта
Открытка с 8 марта Костюм эпохи Возрождения
Костюм эпохи Возрождения Развитие женских половых органов
Развитие женских половых органов Презентация по географическому краеведению Растительность Нижегородской области
Презентация по географическому краеведению Растительность Нижегородской области Методическая разработка раздела программы по географии. 7 класс. Тема: АВСТРАЛИЯ И ОКЕАНИЯ.
Методическая разработка раздела программы по географии. 7 класс. Тема: АВСТРАЛИЯ И ОКЕАНИЯ. Виды промышленных предприятий водного транспорта. Лекция 3
Виды промышленных предприятий водного транспорта. Лекция 3 кубанские казаки в войне 1812 года
кубанские казаки в войне 1812 года Материалы по теме месяца
Материалы по теме месяца презентация Русский танец
презентация Русский танец Степени с рациональными показателями, их свойства
Степени с рациональными показателями, их свойства Дисграфия оптическая и моторная
Дисграфия оптическая и моторная Вопросы по биологии растений, грибов, бактерий, животных
Вопросы по биологии растений, грибов, бактерий, животных Технология сварки высоколегированной нержавеющей стали. Билет 12
Технология сварки высоколегированной нержавеющей стали. Билет 12 Скорость химических реакций
Скорость химических реакций Государственная социальная стипендия
Государственная социальная стипендия Викторина Маленькие герои большой войны
Викторина Маленькие герои большой войны Современные подходы к лечению шизофрении
Современные подходы к лечению шизофрении Театр. Балет. Опера. Драма
Театр. Балет. Опера. Драма Свет как экологический фактор
Свет как экологический фактор Презентация к уроку географии 5 класс. Погода и метеорологические наблюдения.
Презентация к уроку географии 5 класс. Погода и метеорологические наблюдения. Программа деятельности Муниципального координационного центра Одаренные дети
Программа деятельности Муниципального координационного центра Одаренные дети презентация к элективному занятию по теме Элементы комбинаторики (правило суммы и произведения)
презентация к элективному занятию по теме Элементы комбинаторики (правило суммы и произведения) Методические разработки уроков,статьи
Методические разработки уроков,статьи Основы устройства малых космических аппаратов
Основы устройства малых космических аппаратов Регистры. Определение, применение, состав, виды
Регистры. Определение, применение, состав, виды 1 сентября
1 сентября