- Автоматизация строительства скважин

Содержание
- 2. 1. Задачи и основы автоматизации процессов бурения Анализ состояния бурения, выполненный у нас в стране и
- 3. При создании и внедрении АСУТП-бурения важное значение имеют информационно-измерительные системы и средства автоматики как для целей
- 4. Процесс бурения скважин характеризуются независимыми и зависимыми параметрами. К независимым параметрам относятся: осевая нагрузка на долото;
- 5. Виды бурения: турбинное, роторное и с использованием электробура. Какие из параметров процесса бурения можно использовать для
- 6. Таким образом, вследствие отсутствия плавно регулируемых приводов вращения долота и буровых насосов не имеется практической возможности
- 7. 2. Способы управления осевой нагрузкой Для управления осевой нагрузкой можно воздействовать на перемещение верхнего или нижнего
- 8. При ручном управлении процессом бурения нагрузка на долото регулируется изменением подачи бурильного инструмента – с помощью
- 9. При подаче бурильного инструмента нагрузка ступенчато увеличивается. По мере срезания горных пород и соответственно углубления долота
- 10. Площадь треугольника АБВ пропорциональна работе, выполненной долотом. Возьмём на диаграмме точку К, причём, АК=АБ/2. Очевидно, что
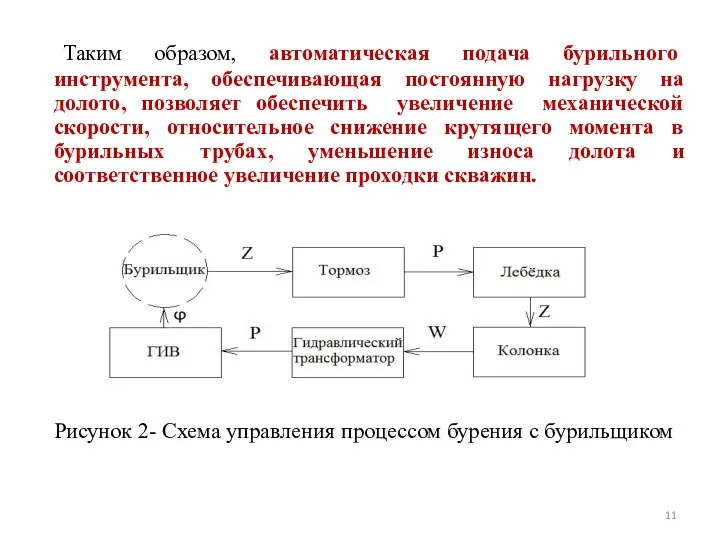
- 11. Таким образом, автоматическая подача бурильного инструмента, обеспечивающая постоянную нагрузку на долото, позволяет обеспечить увеличение механической скорости,
- 12. Бурильщик, при отклонении нагрузки на долото, перемещает на величину Z рукоятку тормоза лебёдки. При этом изменяется
- 13. Рисунок 3 - Автоматическая схема управления процессом бурения Управление по этой формуле можно осуществить автоматически, если
- 14. Представленная сема представляет собой САР по отклонению. Обратная связь осуществляется первичным преобразователем, в качестве которого применяется
- 15. 3. Автоматизация процесса поддержания заданных режимов бурения скважин Для автоматической подачи долота на забой скважины используют
- 16. У наземных УПД конструкция и габариты не зависят от размеров скважины и условий работы долота на
- 17. Это осуществляется перемещением верхнего конца бурильной колонны с помощью УПД. При этом нижний конец бурильной колонны
- 18. В интервалах однородной породы в короткие отрезки времени устанавливается постоянная механическая скорость проходки. Приняв, что в
- 19. Разность перемещений верхнего и нижнего концов колонны связана с осевой нагрузкой на долото выражением (5) где
- 20. Поэтому в динамическом режиме (6) Подставив vН из (4) в (6), получим (7) Следовательно, подачу инструмента
- 21. 4 Электромашинные автоматические регуляторы подачи долота Электромашинные автоматические регуляторы подачи долота выполнены по типу следящей системы
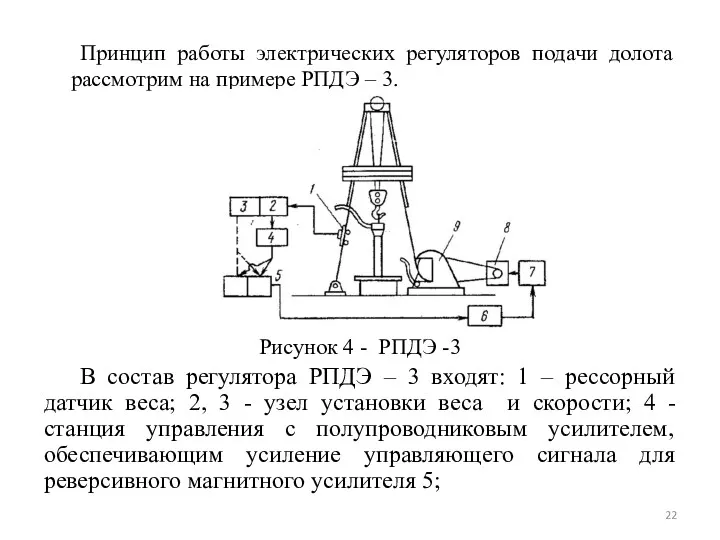
- 22. Принцип работы электрических регуляторов подачи долота рассмотрим на примере РПДЭ – 3. Рисунок 4 - РПДЭ
- 23. 6 - двигатель-генератор, состоящий из приводного асинхронного двигателя и генератора постоянного тока; силовой узел, состоящий из
- 24. Рисунок 5 - Структурная схема регулятора РПДЭ-3
- 25. Сельсин ВС1 работает в паре с сельсином установки веса ВЕ. Напряжение с выхода сельсинной пары поступает
- 26. Перед началом бурения ротор сельсина ВЕ ставят в согласованное с ротором сельсина ВС1 положение, в результате
- 27. . Во вспомогательном режиме поддержания заданного значения скорости подачи или подъема инструмента переключателем SA питание подается
- 28. Если скорость подачи долота превосходит скорость проходки, то нагрузка на забой растет, что может повлечь за
- 29. Эти недостатки послужили для усовершенствования и дальнейшей разработки автоматических регуляторов подачи долота по системе “тиристорный преобразователь
- 30. Рисунок 6 – Структурная схема РПДЭ - 7 М
- 31. На структурной схеме РПДЭ – 7: 1 - долото; 2 - колонна бурильных труб; 3 -
- 32. На схеме показаны следующие блоки и устройства: М - приводной электродвигатель 6; ТП - тиристорный преобразователь;
- 33. Принцип работы РПДЭ – 7. При бурении режим автоматической подачи долота на забой с поддержанием заданной
- 34. Благодаря этому, изменяется скорость подачи инструмента на забой, чем и обеспечивается поддержание заданной нагрузки на долото.
- 35. Регулятор подачи долота типа РДПЭ-7, выполненный на основе силового тиристорного преобразователя, обеспечивает качественные статические и динамические
- 36. 5. Принципы оптимального управления процессом бурения В отличие от устройств подачи долота, поддерживающих на заданном уровне
- 37. 1. Не полностью исследованы вопросы помехоустойчивости измерения и преобразования измерительной информации в условиях работы буровой установки.
- 38. 5. Алгоритмы управления процессом бурения не изменяются по мере углубления скважины, тогда как ее углубление обусловливает
- 39. Выбор соответствующего критерия для конкретных условий — сложная задача, поэтому в практике бурения применяется ограниченный набор
- 40. Можно выделить три метода оптимизации работы долота. 1.Расчетный, основанный на предварительном расчете управляющих параметров, исходя из
- 41. Первые два метода оптимизации целесообразно объединить общим названием - методы неоперативной оптимизации, т.е. в данном случае
- 42. Принцип адаптации применительно к оперативному управлению процесса бурения заключается в том, что в связи с дрейфом
- 43. Задача оптимального управления процессом бурения сводится к построению системы экстремального регулирования. Качество экстремального регулирования зависит от
- 44. Исследования показывают: оптимальной мощности на турбобуре и скорости бурения соответствует оптимальное значение осевой нагрузки на долото.
- 45. Механическая характеристика турбобура при постоянном расходе промывочной жидкости будет n = nХ.Х ( 1 - M/MТ),
- 46. Момент М можно связать с нагрузкой на долото GД через удельный момент МУ, постоянный для данной
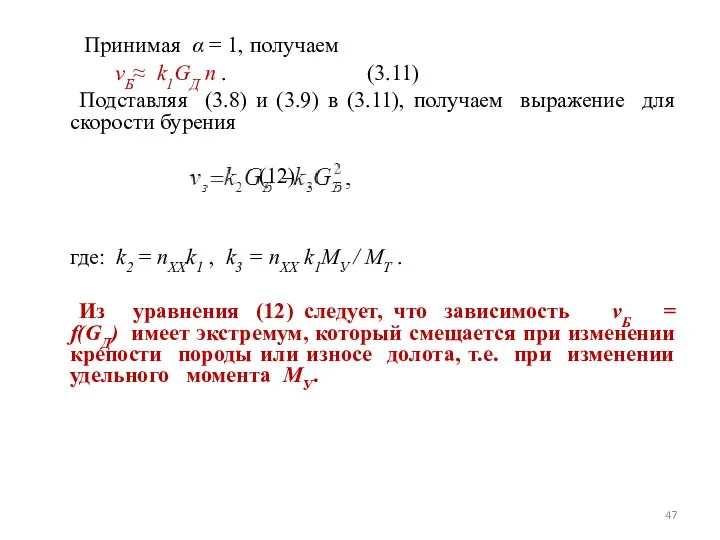
- 47. Принимая α = 1, получаем vБ≈ k1GД n . (3.11) Подставляя (3.8) и (3.9) в (3.11),
- 48. Следовательно, при оптимальном управлении необходим поиск экстремума. Рисунок 7- График, поясняющий поиск экстремума при оптимальном управлении
- 49. Реализация критерия: вводится пробный импульс ΔGД = GД(i+1) - GДi, увеличивающий нагрузку на долото, и по
- 52. Основными элементами САР являются: измерительный преобразователь, нормирующий преобразователь, датчик, контроллер или автоматический регулятор, исполнительное устройство. Измерительный
- 53. Примером измерительного преобразователя может служить термопара. Входным параметром термопары является температура в градусах Цельсия (°С), а
- 54. Нормирующий преобразователь предназначен для получения стандартного (унифицированного) сигнала. В нормирующих преобразователях для преобразования используются дополнительные источники
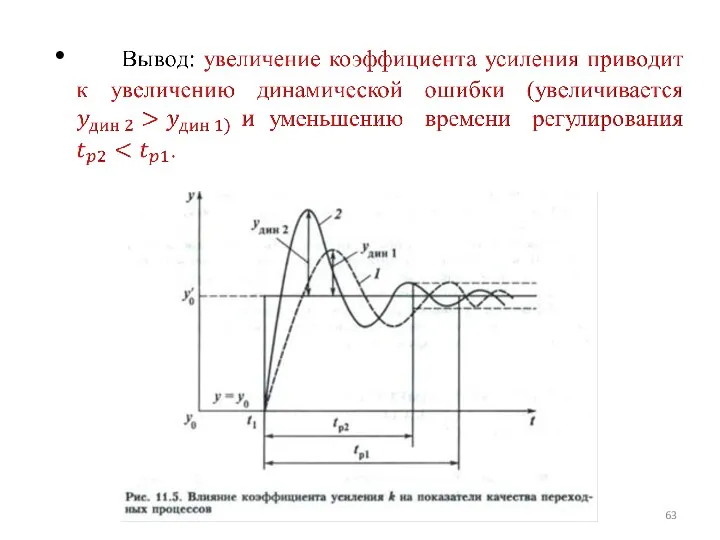
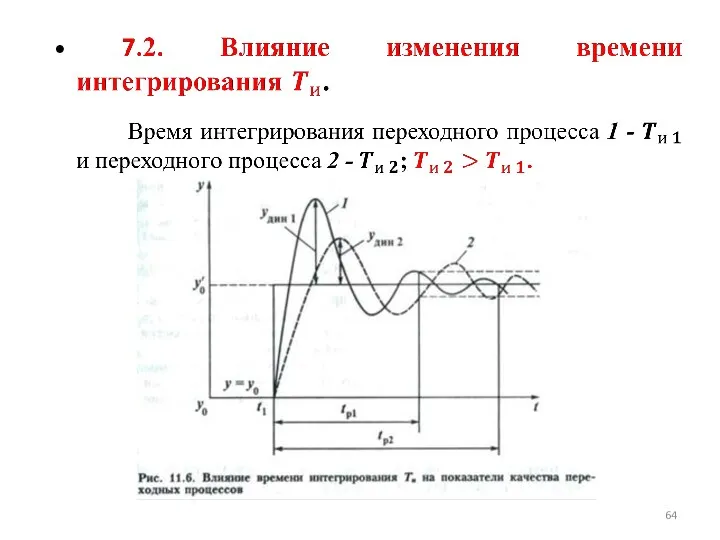
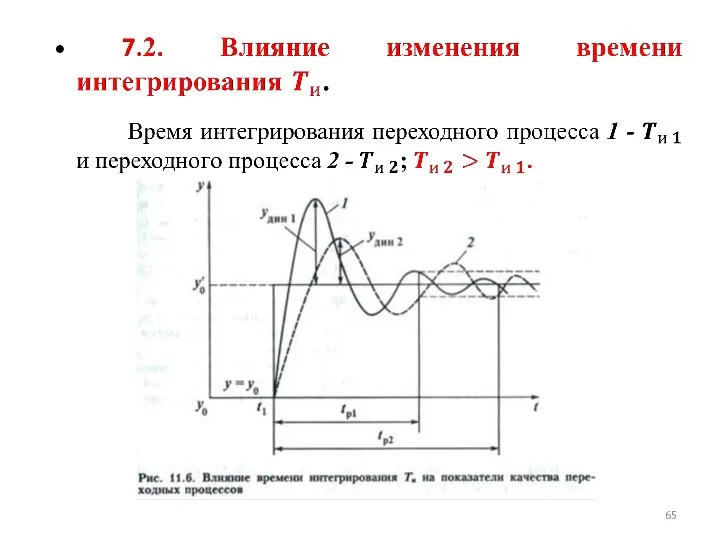
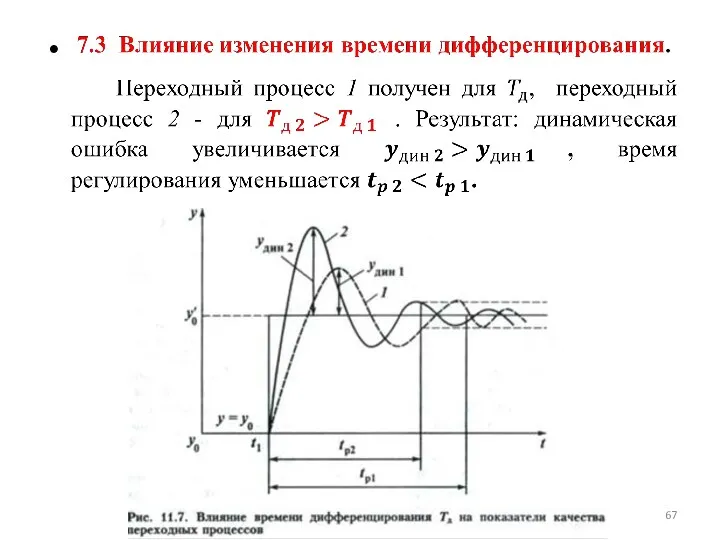
- 58. При возмущающих воздействиях П - регулятор приводит объект в равновесное состояние, но со статической ошибкой. Основным
- 69. Скачать презентацию
1. Задачи и основы автоматизации процессов бурения
Анализ состояния бурения, выполненный у
1. Задачи и основы автоматизации процессов бурения
Анализ состояния бурения, выполненный у
При создании и внедрении АСУТП-бурения важное значение имеют информационно-измерительные системы и
При создании и внедрении АСУТП-бурения важное значение имеют информационно-измерительные системы и
Процесс бурения скважин характеризуются независимыми и зависимыми параметрами.
К независимым параметрам
Процесс бурения скважин характеризуются независимыми и зависимыми параметрами.
К независимым параметрам
Виды бурения: турбинное, роторное и с использованием электробура.
Какие из параметров процесса
Виды бурения: турбинное, роторное и с использованием электробура.
Какие из параметров процесса
Таким образом, вследствие отсутствия плавно регулируемых приводов вращения долота и буровых
Таким образом, вследствие отсутствия плавно регулируемых приводов вращения долота и буровых
2. Способы управления осевой нагрузкой
Для управления осевой нагрузкой можно воздействовать на
2. Способы управления осевой нагрузкой
Для управления осевой нагрузкой можно воздействовать на
При ручном управлении процессом бурения нагрузка на долото регулируется изменением подачи
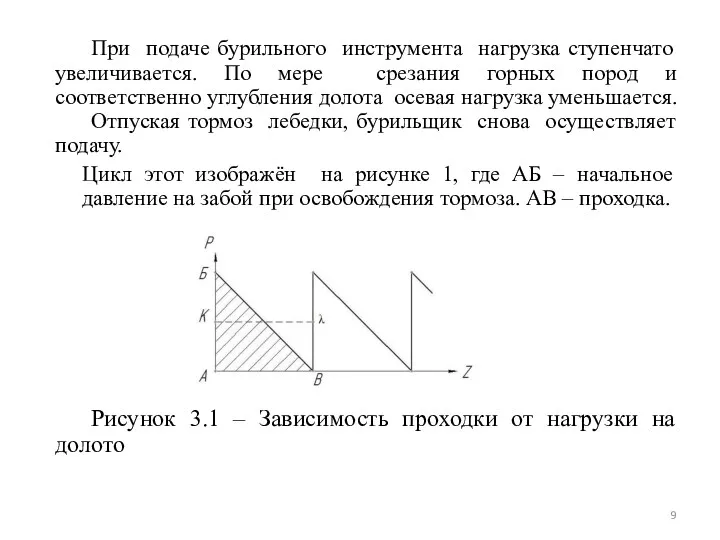
При подаче бурильного инструмента нагрузка ступенчато увеличивается. По мере срезания горных
При подаче бурильного инструмента нагрузка ступенчато увеличивается. По мере срезания горных
Площадь треугольника АБВ пропорциональна работе, выполненной долотом.
Возьмём на диаграмме точку
Площадь треугольника АБВ пропорциональна работе, выполненной долотом.
Возьмём на диаграмме точку
Таким образом, автоматическая подача бурильного инструмента, обеспечивающая постоянную нагрузку на долото,
Таким образом, автоматическая подача бурильного инструмента, обеспечивающая постоянную нагрузку на долото,
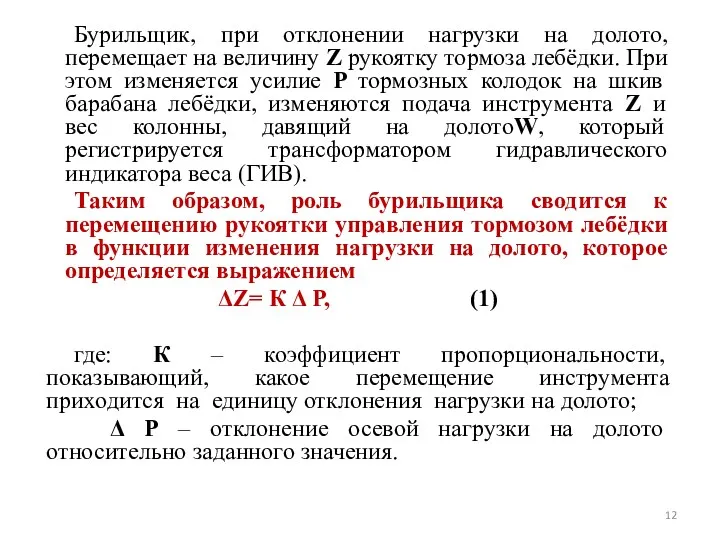
Бурильщик, при отклонении нагрузки на долото, перемещает на величину Z рукоятку
Бурильщик, при отклонении нагрузки на долото, перемещает на величину Z рукоятку
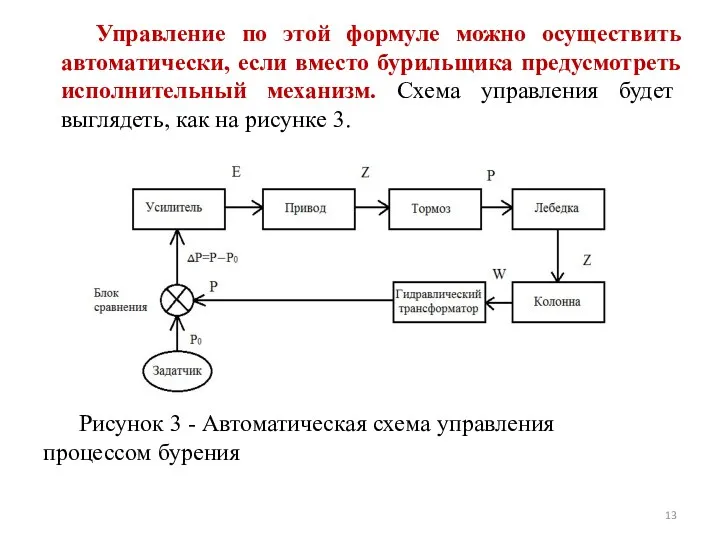
Рисунок 3 - Автоматическая схема управления процессом бурения
Управление по этой формуле
Рисунок 3 - Автоматическая схема управления процессом бурения
Управление по этой формуле
Представленная сема представляет собой САР по отклонению.
Обратная связь осуществляется первичным
Представленная сема представляет собой САР по отклонению.
Обратная связь осуществляется первичным
3. Автоматизация процесса поддержания заданных режимов бурения скважин
Для автоматической подачи
3. Автоматизация процесса поддержания заданных режимов бурения скважин
Для автоматической подачи
У наземных УПД конструкция и габариты не зависят от размеров скважины
У наземных УПД конструкция и габариты не зависят от размеров скважины
Это осуществляется перемещением верхнего конца бурильной колонны с помощью УПД. При
Это осуществляется перемещением верхнего конца бурильной колонны с помощью УПД. При
В интервалах однородной породы в короткие отрезки времени устанавливается постоянная механическая
В интервалах однородной породы в короткие отрезки времени устанавливается постоянная механическая
Разность перемещений верхнего и нижнего концов колонны связана с осевой нагрузкой
Разность перемещений верхнего и нижнего концов колонны связана с осевой нагрузкой
Поэтому в динамическом режиме
(6)
Подставив vН из (4) в (6), получим
(7)
Следовательно, подачу
Поэтому в динамическом режиме
(6)
Подставив vН из (4) в (6), получим
(7)
Следовательно, подачу
4 Электромашинные автоматические регуляторы подачи долота
Электромашинные автоматические регуляторы подачи долота выполнены
4 Электромашинные автоматические регуляторы подачи долота
Электромашинные автоматические регуляторы подачи долота выполнены
Принцип работы электрических регуляторов подачи долота рассмотрим на примере РПДЭ –
Принцип работы электрических регуляторов подачи долота рассмотрим на примере РПДЭ –
6 - двигатель-генератор, состоящий из приводного асинхронного двигателя и генератора постоянного
6 - двигатель-генератор, состоящий из приводного асинхронного двигателя и генератора постоянного
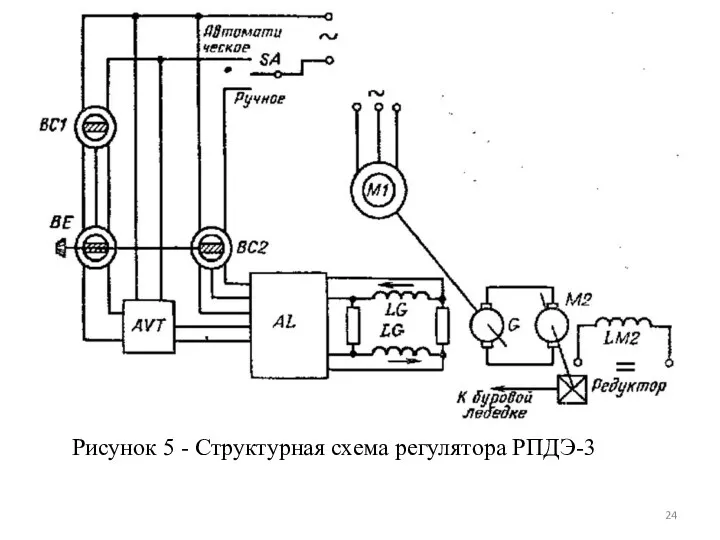
Рисунок 5 - Структурная схема регулятора РПДЭ-3
Рисунок 5 - Структурная схема регулятора РПДЭ-3
Сельсин ВС1 работает в паре с сельсином установки веса ВЕ. Напряжение
Сельсин ВС1 работает в паре с сельсином установки веса ВЕ. Напряжение
Перед началом бурения ротор сельсина ВЕ ставят в согласованное с ротором
Перед началом бурения ротор сельсина ВЕ ставят в согласованное с ротором
.
Во вспомогательном режиме поддержания заданного значения скорости подачи или подъема инструмента
.
Во вспомогательном режиме поддержания заданного значения скорости подачи или подъема инструмента
Если скорость подачи долота превосходит скорость проходки, то нагрузка на забой
Если скорость подачи долота превосходит скорость проходки, то нагрузка на забой
Эти недостатки послужили для усовершенствования и дальнейшей разработки автоматических регуляторов подачи
Эти недостатки послужили для усовершенствования и дальнейшей разработки автоматических регуляторов подачи
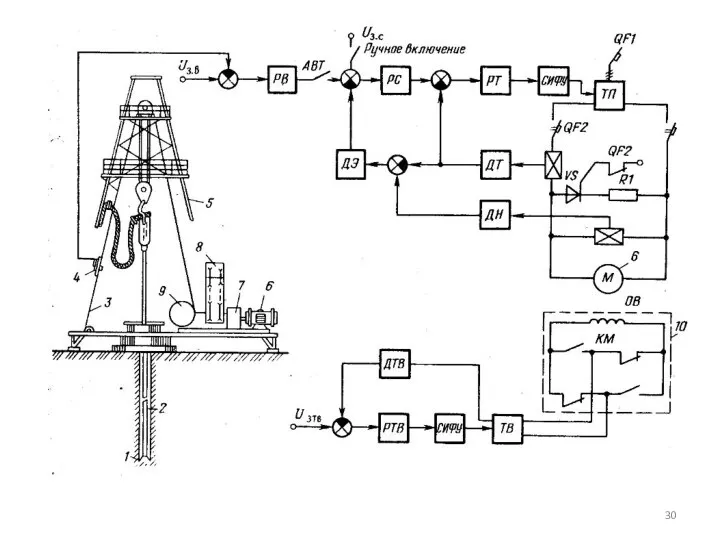
Рисунок 6 – Структурная схема РПДЭ - 7
М
Рисунок 6 – Структурная схема РПДЭ - 7
М
На структурной схеме РПДЭ – 7:
1 - долото; 2 - колонна
На структурной схеме РПДЭ – 7:
1 - долото; 2 - колонна
На схеме показаны следующие блоки и устройства:
М - приводной электродвигатель 6;
На схеме показаны следующие блоки и устройства:
М - приводной электродвигатель 6;
Принцип работы РПДЭ – 7. При бурении режим автоматической подачи долота
Принцип работы РПДЭ – 7. При бурении режим автоматической подачи долота
Благодаря этому, изменяется скорость подачи инструмента на забой, чем и обеспечивается
Благодаря этому, изменяется скорость подачи инструмента на забой, чем и обеспечивается
Регулятор подачи долота типа РДПЭ-7, выполненный на основе силового тиристорного преобразователя,
Регулятор подачи долота типа РДПЭ-7, выполненный на основе силового тиристорного преобразователя,
5. Принципы оптимального управления процессом бурения
В отличие от устройств подачи долота,
5. Принципы оптимального управления процессом бурения
В отличие от устройств подачи долота,
1. Не полностью исследованы вопросы помехоустойчивости измерения и преобразования измерительной информации
1. Не полностью исследованы вопросы помехоустойчивости измерения и преобразования измерительной информации
5. Алгоритмы управления процессом бурения не изменяются по мере углубления скважины,
5. Алгоритмы управления процессом бурения не изменяются по мере углубления скважины,
Выбор соответствующего критерия для конкретных условий — сложная задача, поэтому в
Выбор соответствующего критерия для конкретных условий — сложная задача, поэтому в
Можно выделить три метода оптимизации работы долота.
1.Расчетный, основанный на предварительном расчете
Можно выделить три метода оптимизации работы долота.
1.Расчетный, основанный на предварительном расчете
Первые два метода оптимизации целесообразно объединить общим названием - методы неоперативной
Первые два метода оптимизации целесообразно объединить общим названием - методы неоперативной
Принцип адаптации применительно к оперативному управлению процесса бурения заключается в том,
Принцип адаптации применительно к оперативному управлению процесса бурения заключается в том,
Задача оптимального управления процессом бурения сводится к построению системы экстремального регулирования.
Качество
Задача оптимального управления процессом бурения сводится к построению системы экстремального регулирования.
Качество
Исследования показывают:
оптимальной мощности на турбобуре и скорости бурения соответствует оптимальное значение
Исследования показывают:
оптимальной мощности на турбобуре и скорости бурения соответствует оптимальное значение
Механическая характеристика турбобура при постоянном расходе промывочной жидкости будет
n = nХ.Х
Механическая характеристика турбобура при постоянном расходе промывочной жидкости будет
n = nХ.Х
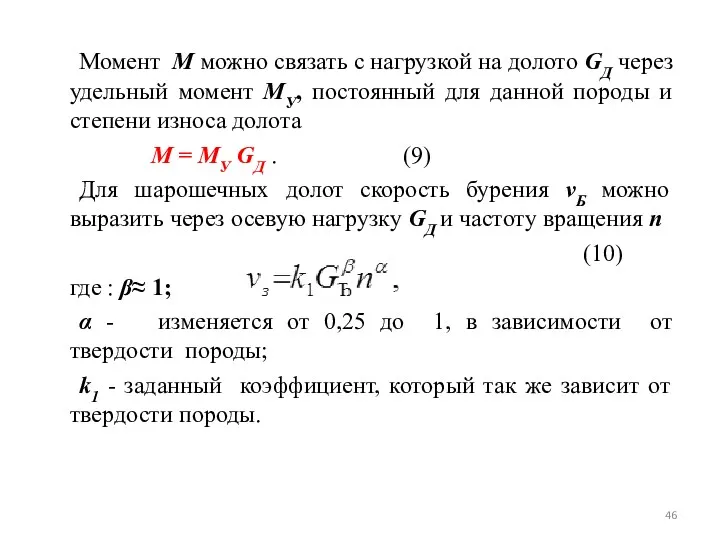
Момент М можно связать с нагрузкой на долото GД через удельный
Момент М можно связать с нагрузкой на долото GД через удельный
Принимая α = 1, получаем
vБ≈ k1GД n . (3.11)
Подставляя (3.8)
Принимая α = 1, получаем
vБ≈ k1GД n . (3.11)
Подставляя (3.8)
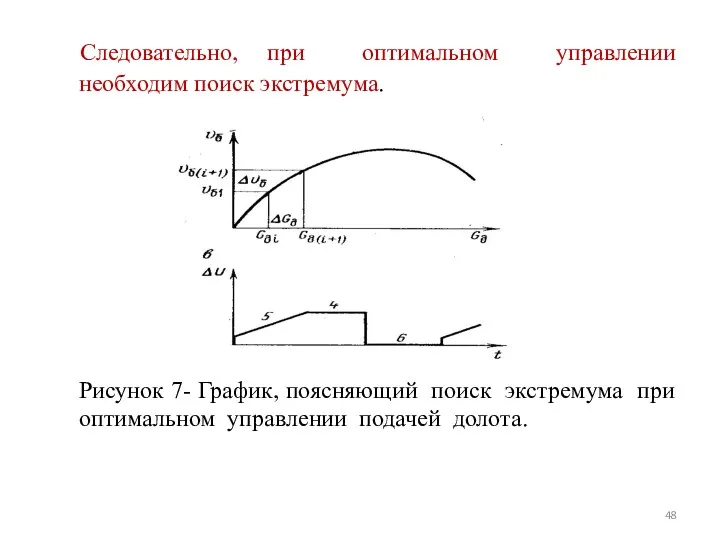
Следовательно, при оптимальном управлении необходим поиск экстремума.
Рисунок 7- График, поясняющий поиск
Следовательно, при оптимальном управлении необходим поиск экстремума.
Рисунок 7- График, поясняющий поиск
Реализация критерия: вводится пробный импульс
ΔGД = GД(i+1) - GДi,
увеличивающий
Реализация критерия: вводится пробный импульс
ΔGД = GД(i+1) - GДi,
увеличивающий
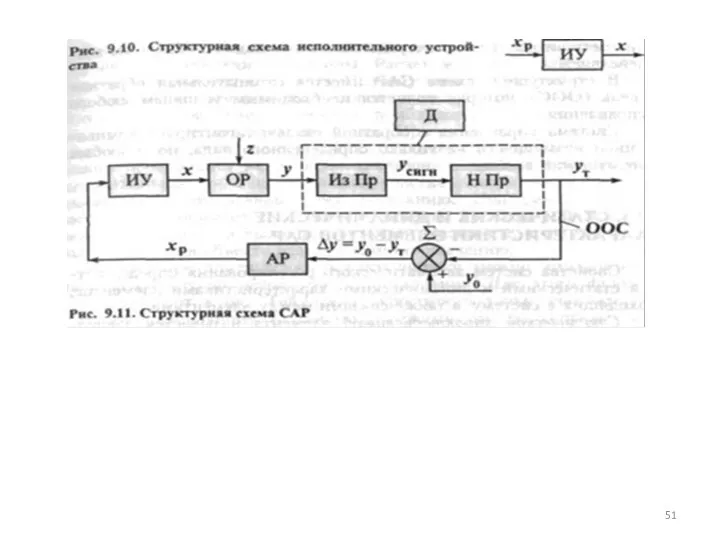
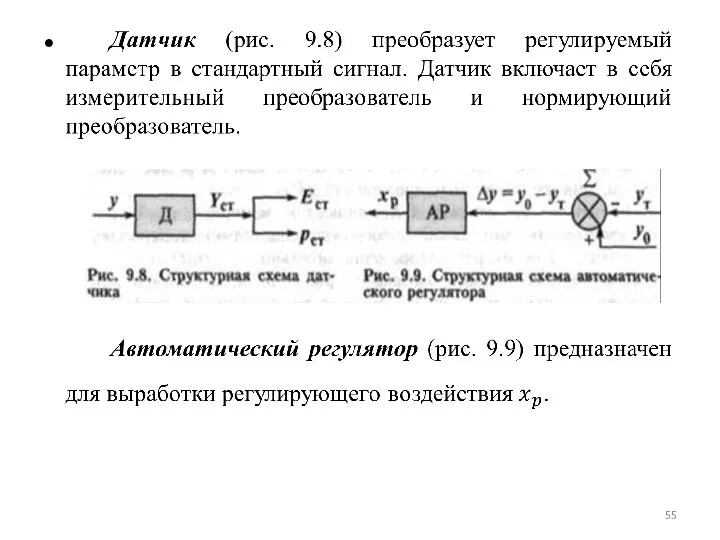
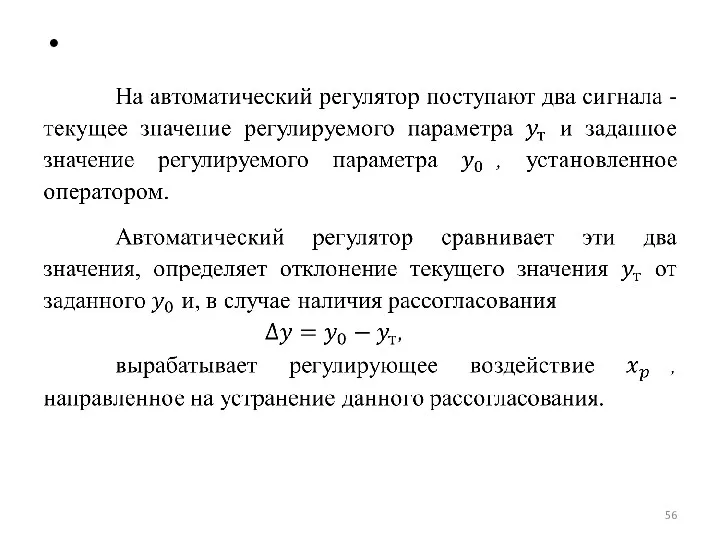
Основными элементами САР являются: измерительный преобразователь, нормирующий преобразователь, датчик, контроллер или
Основными элементами САР являются: измерительный преобразователь, нормирующий преобразователь, датчик, контроллер или
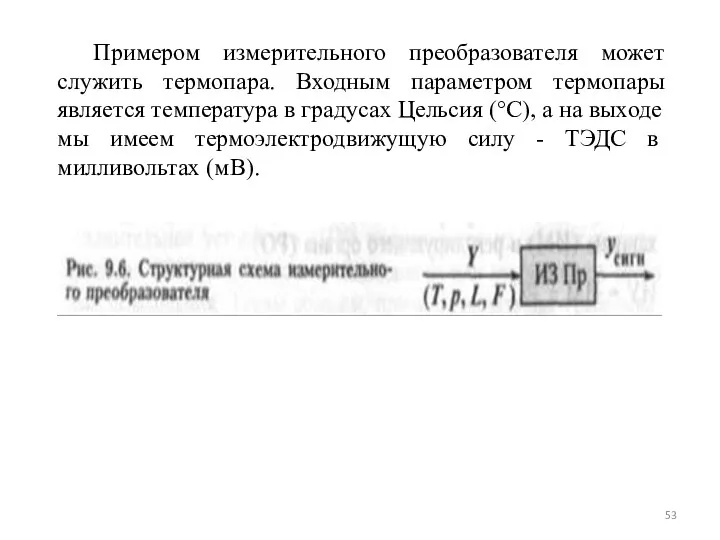
Примером измерительного преобразователя может служить термопара. Входным параметром термопары является температура
Примером измерительного преобразователя может служить термопара. Входным параметром термопары является температура
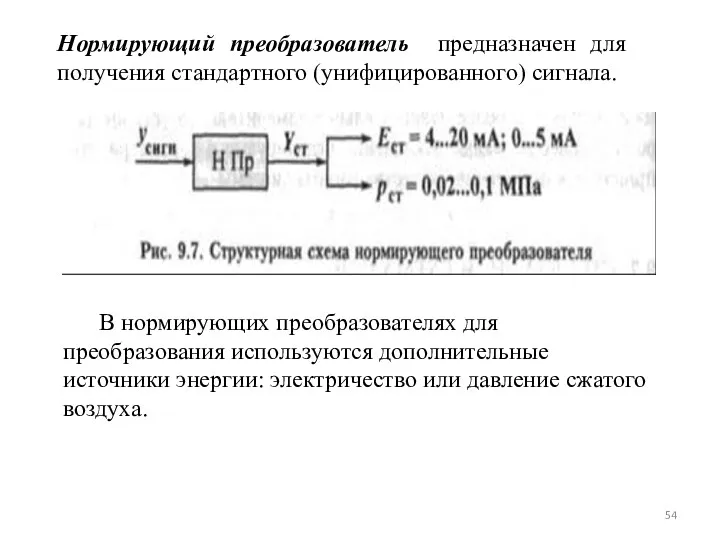
Нормирующий преобразователь предназначен для получения стандартного (унифицированного) сигнала.
В нормирующих преобразователях
Нормирующий преобразователь предназначен для получения стандартного (унифицированного) сигнала.
В нормирующих преобразователях
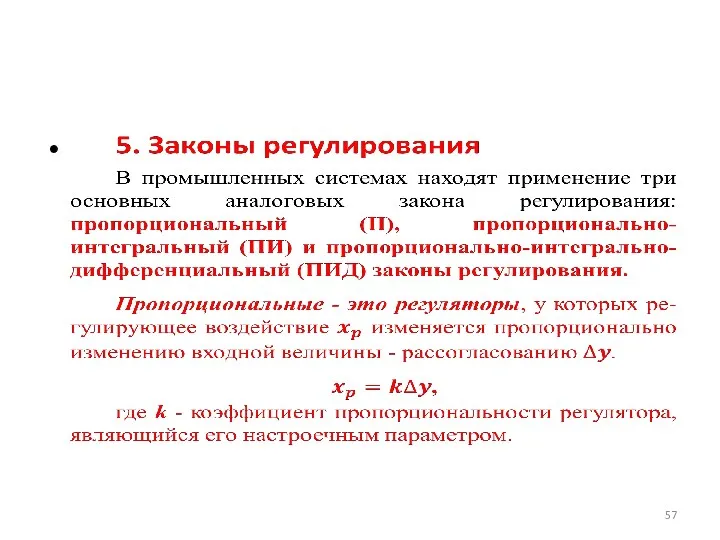
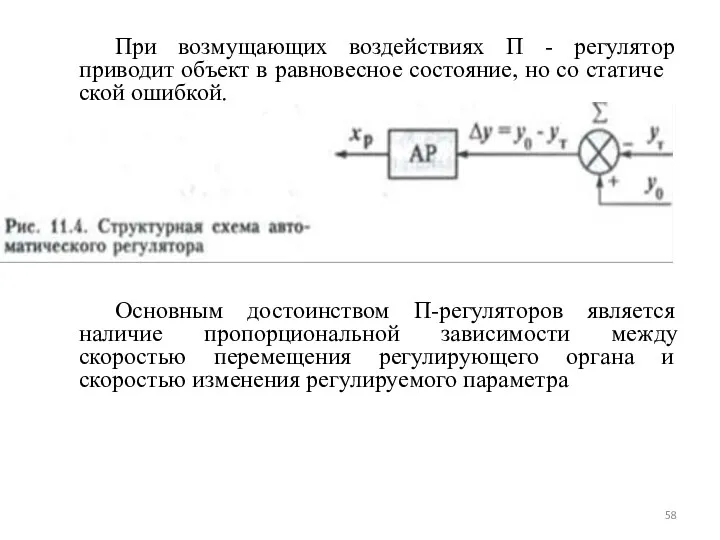
При возмущающих воздействиях П - регулятор приводит объект в равновесное состояние,
При возмущающих воздействиях П - регулятор приводит объект в равновесное состояние,

 Электромонтажные и сборочные технологии
Электромонтажные и сборочные технологии Приборы в гидравлике
Приборы в гидравлике What English holidays do you know
What English holidays do you know Состав сооружений континентального шельфа
Состав сооружений континентального шельфа Роль Европейского Севера в развитии русской культуры
Роль Европейского Севера в развитии русской культуры ВКР: Электрификация и автоматизация технологических процессов при строительстве станции Улица Новаторов
ВКР: Электрификация и автоматизация технологических процессов при строительстве станции Улица Новаторов Шедевры классицизма в архитектуре России
Шедевры классицизма в архитектуре России Нефтяная и газовая промышленность России
Нефтяная и газовая промышленность России Технические нормы и требования к проектированию и строительству железнодорожного электроснабжения ВСМ
Технические нормы и требования к проектированию и строительству железнодорожного электроснабжения ВСМ Модель сетевого взаимодействия МОУ в образовательном округе
Модель сетевого взаимодействия МОУ в образовательном округе Welding process
Welding process Приобщение детей дошкольного возраста к истокам русских народных традиций через театрализованную деятельность
Приобщение детей дошкольного возраста к истокам русских народных традиций через театрализованную деятельность Материал к конкурсу Учитель года Москвы - 2012
Материал к конкурсу Учитель года Москвы - 2012 Своя игра
Своя игра Масштаб карты
Масштаб карты Класифікація будівельних матеріалів
Класифікація будівельних матеріалів Строение человека. Органы дыхания
Строение человека. Органы дыхания Классическая школа управления. Основные последователи
Классическая школа управления. Основные последователи Воспитание с любовью
Воспитание с любовью Digital Design and Computer Architecture. Introdution
Digital Design and Computer Architecture. Introdution Профилактика травматизма
Профилактика травматизма Внедрение информационно-коммуникационных технологий в образование на уроках английского языка
Внедрение информационно-коммуникационных технологий в образование на уроках английского языка Медициналық қызмет көлемі және құрылысы
Медициналық қызмет көлемі және құрылысы Районный конкурс экологических проектов Влияние антропогенных загрязнений на здоровье человека Родному селу – нашу заботу
Районный конкурс экологических проектов Влияние антропогенных загрязнений на здоровье человека Родному селу – нашу заботу Военнослужащие и взаимоотношения между ними
Военнослужащие и взаимоотношения между ними Античность. Устные коммуникации
Античность. Устные коммуникации Прямоугольные треугольники
Прямоугольные треугольники Интерфейсы и протоколы цифровой передачи информации
Интерфейсы и протоколы цифровой передачи информации