- Балансировка роторов

Содержание
- 2. ОСНОВНЫЕ ПОНЯТИЯ Ротором (по гост 19534-74) называют звенья механизмов, совершающие вращательное движение и удерживаемые при этом
- 3. Если масса ротора распределена относительно оси вращения равномерно, то главная центральная ось инерции x-x совпадает с
- 4. При несовпадении оси вращения с осью x-x, ротор будет неуравновешенным и в его опорах при вращении
- 5. Виды неуравновешенности В зависимости от взаимного расположения оси вращения и главной цетральной оси инерции x-x ,
- 6. Статическая неуравновешенность ось вращения и главная центральная ось инерции x-x параллельны:
- 7. Моментная неуравновешенность ось вращения и главная центральная ось инерции x-x пересекаются в центре масс ротора S:
- 8. Динамическая неуравновешенность ось вращения и главная центральная ось инерции x-x либо пересекаются вне центра масс, либо
- 9. ДИСБАЛАНС Мерой статической неуравновешенности ротора является дисбаланс - векторная величина, равная произведению неуравновешенной массы m на
- 10. ДИСБАЛАНС Направление главного вектора дисбаланса D совпадает с направлением главного вектора сил инерции Fи, действующих на
- 11. дисбаланс Моментная неуравновешенность характеризуется главным моментом дисбалансов ротора MD , который пропорционален главному моменту сил инерции
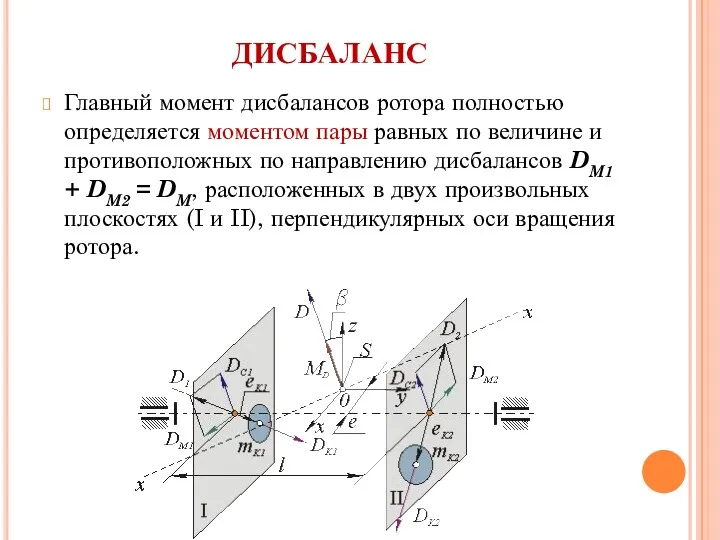
- 12. ДИСБАЛАНС Главный момент дисбалансов ротора полностью определяется моментом пары равных по величине и противоположных по направлению
- 13. Главный момент дисбалансов ротора
- 14. Дисбаланс и момент дисбалансов не зависят от частоты вращения, они полностью определяются конструкцией ротора и точностью
- 15. БАЛАНСИРОВКА Балансировкой называют искусственное перераспределение массы ротора с целью его уравновешивания (или процесс определения значений и
- 16. Балансировка эквивалентна уравновешиванию системы инерционных сил, прикладываемых к подвижному ротору для его равновесия. Полное уравновешивание ротора
- 17. УРАВНОВЕШИВАНИЕ РОТОРА Жесткий ротор можно уравновесить двумя корректирующими массами, расположенными в двух произвольно выбранных плоскостях, перпендикулярных
- 19. Скачать презентацию
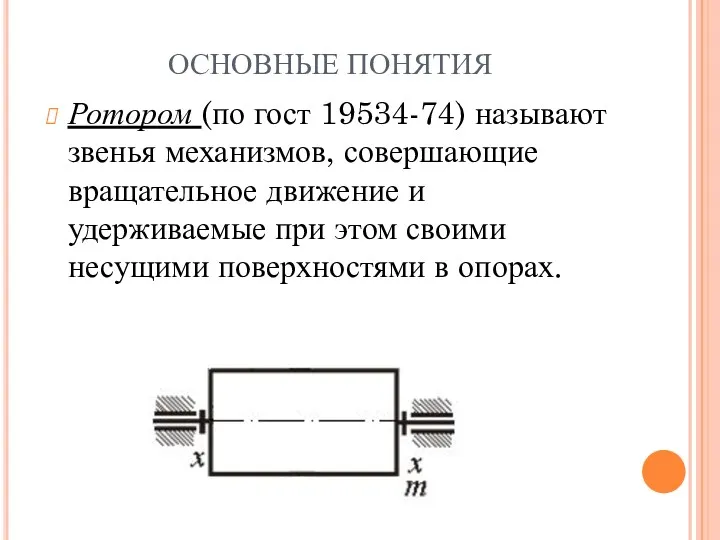
ОСНОВНЫЕ ПОНЯТИЯ
Ротором (по гост 19534-74) называют звенья механизмов, совершающие вращательное движение
ОСНОВНЫЕ ПОНЯТИЯ
Ротором (по гост 19534-74) называют звенья механизмов, совершающие вращательное движение
Если масса ротора распределена относительно оси вращения равномерно, то главная центральная
Если масса ротора распределена относительно оси вращения равномерно, то главная центральная
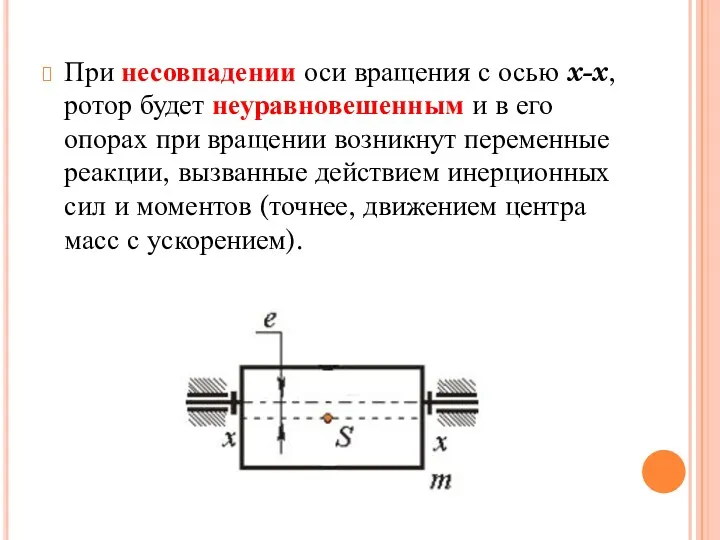
При несовпадении оси вращения с осью x-x, ротор будет неуравновешенным и
При несовпадении оси вращения с осью x-x, ротор будет неуравновешенным и
Виды неуравновешенности
В зависимости от взаимного расположения оси вращения и главной цетральной
Виды неуравновешенности
В зависимости от взаимного расположения оси вращения и главной цетральной
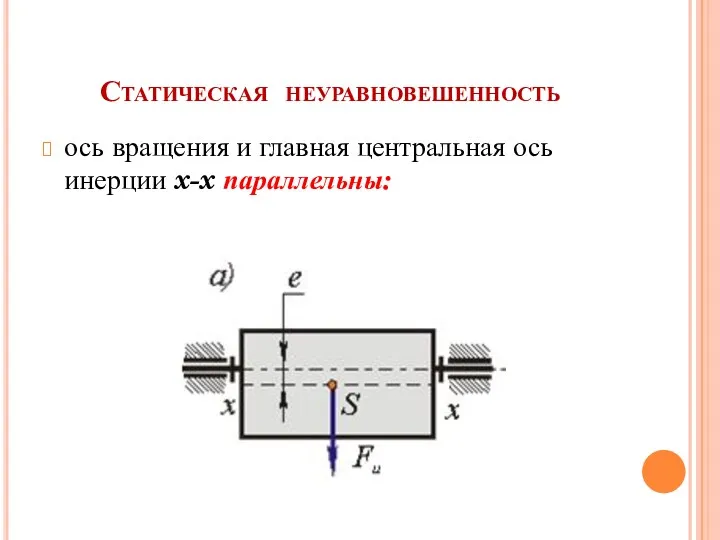
Статическая неуравновешенность
ось вращения и главная центральная ось инерции x-x параллельны:
Статическая неуравновешенность
ось вращения и главная центральная ось инерции x-x параллельны:
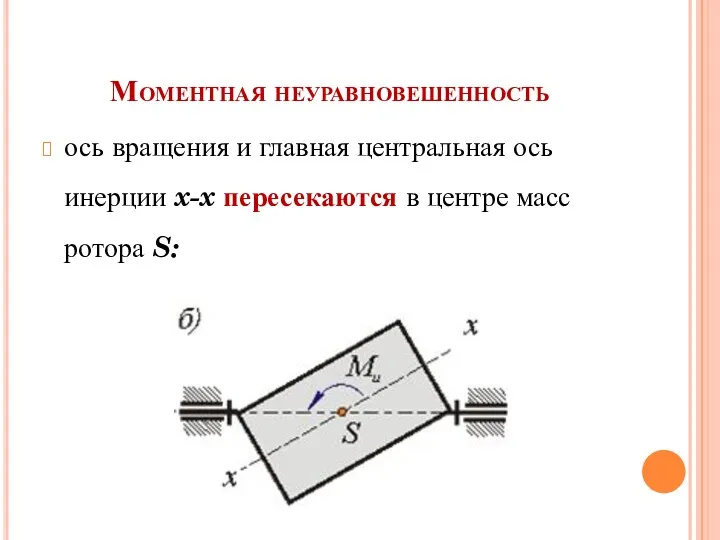
Моментная неуравновешенность
ось вращения и главная центральная ось инерции x-x пересекаются в
Моментная неуравновешенность
ось вращения и главная центральная ось инерции x-x пересекаются в
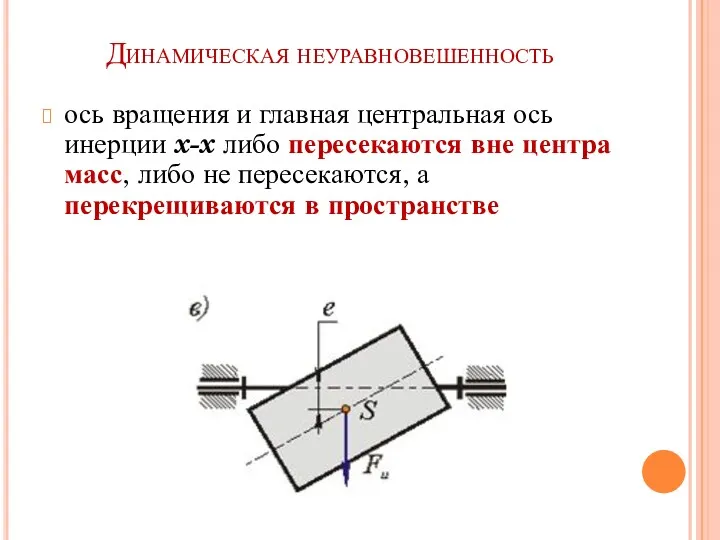
Динамическая неуравновешенность
ось вращения и главная центральная ось инерции x-x либо пересекаются
Динамическая неуравновешенность
ось вращения и главная центральная ось инерции x-x либо пересекаются
ДИСБАЛАНС
Мерой статической неуравновешенности ротора является дисбаланс - векторная величина, равная произведению
ДИСБАЛАНС
Мерой статической неуравновешенности ротора является дисбаланс - векторная величина, равная произведению
ДИСБАЛАНС
Направление главного вектора дисбаланса D совпадает с направлением главного вектора
ДИСБАЛАНС
Направление главного вектора дисбаланса D совпадает с направлением главного вектора
дисбаланс
Моментная неуравновешенность характеризуется главным моментом дисбалансов ротора MD , который пропорционален
дисбаланс
Моментная неуравновешенность характеризуется главным моментом дисбалансов ротора MD , который пропорционален
ДИСБАЛАНС
Главный момент дисбалансов ротора полностью определяется моментом пары равных по величине
ДИСБАЛАНС
Главный момент дисбалансов ротора полностью определяется моментом пары равных по величине
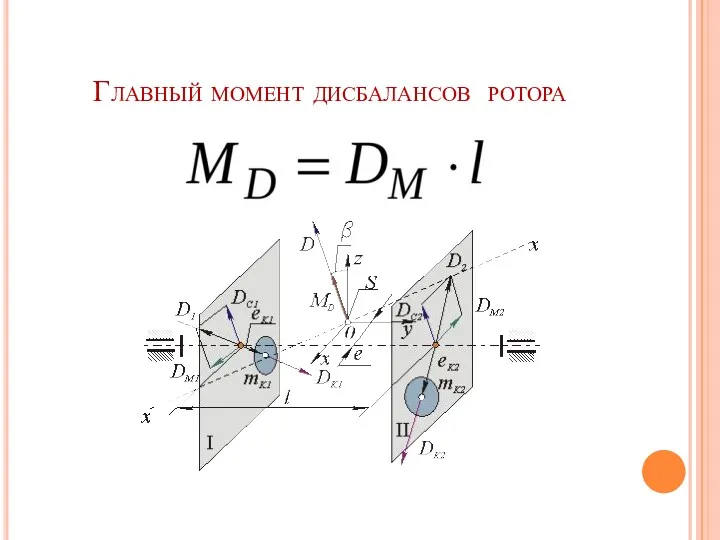
Главный момент дисбалансов ротора
Главный момент дисбалансов ротора
Дисбаланс и момент дисбалансов не зависят от частоты вращения, они полностью
Дисбаланс и момент дисбалансов не зависят от частоты вращения, они полностью
БАЛАНСИРОВКА
Балансировкой называют искусственное перераспределение массы ротора с целью его уравновешивания (или
БАЛАНСИРОВКА
Балансировкой называют искусственное перераспределение массы ротора с целью его уравновешивания (или
Балансировка эквивалентна уравновешиванию системы инерционных сил, прикладываемых к подвижному ротору для
Балансировка эквивалентна уравновешиванию системы инерционных сил, прикладываемых к подвижному ротору для
УРАВНОВЕШИВАНИЕ РОТОРА
Жесткий ротор можно уравновесить двумя корректирующими массами, расположенными в
УРАВНОВЕШИВАНИЕ РОТОРА
Жесткий ротор можно уравновесить двумя корректирующими массами, расположенными в
 Звуко-слоговой анализ слов
Звуко-слоговой анализ слов Основные этапы развития экономической теории
Основные этапы развития экономической теории Географическое положение Евразии. Исследования Центральной Азии. 7 класс
Географическое положение Евразии. Исследования Центральной Азии. 7 класс Homepage Part 1. Work needs social. Social loves offices
Homepage Part 1. Work needs social. Social loves offices Лимфома Ходжкина и неходжкинские лимфомы
Лимфома Ходжкина и неходжкинские лимфомы Система Всемирной торговой организации по разрешению споров
Система Всемирной торговой организации по разрешению споров слова 5 кл
слова 5 кл Күн электростанциясы
Күн электростанциясы Электролитическая диссоциация
Электролитическая диссоциация Протестантизм
Протестантизм Нет в России семьи такой, где б ни памятен был свой герой...
Нет в России семьи такой, где б ни памятен был свой герой... Основные показатели деятельности Территориального фонда обязательного медицинского страхования Оренбургской области в 2017 году
Основные показатели деятельности Территориального фонда обязательного медицинского страхования Оренбургской области в 2017 году Эволюционная биология развития животных
Эволюционная биология развития животных Основы инженерно-технического обеспечения служебной деятельности подразделений УИС
Основы инженерно-технического обеспечения служебной деятельности подразделений УИС Семинар-практикум Экологическая сказка, как метод формирования экологической культуры воспитанников
Семинар-практикум Экологическая сказка, как метод формирования экологической культуры воспитанников СТРУКТУРА, ПОРЯДОК РАЗРАБОТКИ И ОФОРМЛЕНИЯ ИННОВАЦИОННЫХ ПРОЕКТОВ
СТРУКТУРА, ПОРЯДОК РАЗРАБОТКИ И ОФОРМЛЕНИЯ ИННОВАЦИОННЫХ ПРОЕКТОВ Судебно-правовая защита граждан в сфере социальной защиты и пенсионного обеспечения
Судебно-правовая защита граждан в сфере социальной защиты и пенсионного обеспечения Широтная зональность
Широтная зональность Наука как феномен культуры
Наука как феномен культуры Общественное движение в годы правления Николая I
Общественное движение в годы правления Николая I Разработка программного модуля диагностики автомобилей
Разработка программного модуля диагностики автомобилей Скаутское движение в России до 1920 года
Скаутское движение в России до 1920 года Мастер-класс Лепка декоративного панно из глиняного пласта Ангел
Мастер-класс Лепка декоративного панно из глиняного пласта Ангел Введение в зоологию. Одноклеточные. Происхождение многоклеточных
Введение в зоологию. Одноклеточные. Происхождение многоклеточных Коррозия металлов
Коррозия металлов Репродуктивті жастағы жатыр миомасы бар әйелдерге ЭМА-ны гистероэктомия мен салыстыру
Репродуктивті жастағы жатыр миомасы бар әйелдерге ЭМА-ны гистероэктомия мен салыстыру Расписание автобусов с 30 04 2020
Расписание автобусов с 30 04 2020 Индивидуальная образовательная программа
Индивидуальная образовательная программа